Изобретение относится к области ракетно-космической техники и может быть использовано для размещения космических аппаратов на геостационарной орбите в плоскости, параллельной экваториальной, но не совпадающей с ней.
Свойство космических аппаратов, запускаемых на геостационарную орбиту в экваториальной плоскости на расстоянии 42164 км (35786 км от поверхности Земли), находясь на которой космический аппарат обращается вокруг планеты с угловой скоростью, равной угловой скорости вращения Земли вокруг оси, и постоянно находится над одной и той же точкой земной поверхности, широко используется в мировой космонавтике.
Практика эксплуатации геостационарных космических аппаратов подтвердила эффективность их применения для решения широкого круга задач: наблюдения, связи, управления и других.
К основным достоинствам геостационарной орбиты (ГСО) относится неподвижность спутника относительно наземного потребителя, а также значительная высота его положения, позволяющая обслуживать большие территории (до 30% поверхности земного шара одним спутником).
Способы выведения космических аппаратов (КА) на ГСО и их размещения отработаны, известны устройства для реализации этих способов.
Например, патент №2254265 С2, В64С 1/00, В64С 1/10 «Способ выведения искусственных спутников в качестве основной и попутной полезных нагрузок на геостационарную орбиту и устройство для его осуществления», авторы Медведев А.А., Недайвода А.К. и др., патентообладатель ФГУП «Государственный космический научно-производственный центр им. М.В.Хруничева».
Однако условия эксплуатации этого вида ИСЗ с течением времени все более усложняются. Общее число КА на единственной геостационарной орбите, лежащей в плоскости экватора Земли, постоянно увеличивается. Это приводит к возникновению различных проблем, например, взаимных помех в работе бортовых средств и проблем обеспечения безопасности групповых полетов. Проблему создают КА, выработавшие свой ресурс и не убранные с ГСО в зону захоронения.
Количество КА, которые могут быть безопасно размещены и эффективно работать на геостационарной орбите, не беспредельно.
ГСО в экваториальной плоскости имеет два существенных недостатка:
- ограниченная емкость частотно-орбитального ресурса;
- низкие углы места в средних и высоких широтах, невозможность обеспечения связи в приполярных и полярных районах.
Геостационарная орбита признана мировым сообществом общим ограниченным ресурсом человечества и ее использование осуществляется международной организацией в рамках международного космического права. Размещение КА на ГСО в точках стояния распределяется и строго контролируется международной организацией.
Уникальная особенность ГСО привела к ее быстрому и интенсивному заполнению космическими аппаратами национальных и международных систем спутниковой связи и исчерпанию ее частотно-орбитального ресурса. В общей сложности с момента запуска первого спутника на ГСО с 1964 по 2001 гг. на ГСО было выведено более 600 спутников связи различного назначения. В настоящее время на ГСО находятся 407 активно действующих космических аппаратов. Дальнейшее развертывание новых систем на этой орбите сопряжено со сложным, длительным и достаточно дорогостоящим процессом согласования и координации с национальными и международными организациями.
Следовательно в будущем, возможно недалеком, неизбежно возникнет проблема размещения геостационарных КА вне ныне используемой и все более загружаемой геостационарной орбиты.
Актуальными стали технические задачи, касающиеся снижения остроты проблемы загруженности ГСО.
Существует принципиальная возможность рассредоточения геостационарных ИСЗ в окрестности геостационарной орбиты.
Так, например, по заявке №93010797/09 от 01.03.1993 Н04В 7/15, Сенкевич В.П., Семененко Э.Т., Сергеев В.Е. «Способ размещения космических ретрансляторов спутниковой системы связи на геостационарной орбите и многофункциональная платформа для его осуществления» предложено расширить область ГСО, используя привязные блоки, вращающиеся вокруг центрального космического аппарата, находящегося на геостационарной орбите в экваториальной плоскости.
Известен патент РФ 2058916 B64G 1/00 - космическая станция (КС), размещенная на ГСО, содержащая несколько удаленных друг от друга модулей, объединенных в орбитальный комплекс посредством гибких связей и снабженных энергоисточником, средствами преобразования и распределения потоков энергии и информации, управления движением и навигацией, а также размещенное на орбитальном комплексе приемное и передающее оборудование.
Недостатками решения по данному патенту является небольшой ресурс работы КС, невысокая ремонтопригодность и соответственно невысокая эффективность из-за отсутствия возможности дооснащения КС и наращивания ее новыми аппаратами.
По патенту №2202499 C1 B64G 1/00, G1/10 ОАО «РКК «Энергия» им. С.П. Королева «Космическая станция, преимущественно на геостационарной орбите» предложена космическая станция на ГСО, содержащая базовые модули, снабженная системами энергообеспечения, управления движением и навигацией, двигательными установками, приемным и передающим оборудованием, средствами преобразования и распределения потоков энергии и объединенные посредством связей в орбитальный комплекс. Сборный стержень ориентирован параллельно земной оси, имеются средства захвата целевых спутников и установки их на сборном стержне.
Недостатком предлагаемых решений расширения использования ГСО в экваториальной плоскости является необходимость создания сложных и дорогостоящих космических станций, объединяющих группировки целевых спутников.
Научно-технические достижения в области баллистики позволяют находить новые решения в построении устойчивых траекторий движения КА.
Например, освоено движение КА около космического тела в плоскости, не проходящей через центр массы этого космического тела. Для этого используют построение круговой траектории вокруг точки либрации, расположенной около космического тела. Это дает возможность построения эффективной траектории перехода КА от одного космического тела к другому. Например, от спутника Юпитера Калисто к Ганимеду, Европе, Ио и в обратном направлении сдвижения от спутника Ио к Европе, потом Ганимеду, потом к Калисто. Такая схема получила название «Лестница «Лагранжа».
Однако расчеты показали, что использования точек либрации около Земли для целей расширения геостационарной области невозможно.
Теоретические предсказания о возможности размещения космического аппарата на некеплеровскую орбиту (NKO), или левитирующую смещенную орбиту (levited displaced orbit), высказанные американским физиком Робертом Форвардом (Robert L.Forward), считались невозможными в силу ряда проблем с динамической стабильностью космического аппарата.
Ученые лаборатории передовых космических концепций университета Стратклайда (Advanced Space Concepts Laboratory) Шахид Баиг (Shahid Baig) и Колин Макиннес (Colin MCinnes) предложили семейство (NKO), при котором космический аппарат находится выше или ниже фиксированной точки ГСО, оснащен солнечным парусом и находится в сложном нелинейном движении, но не утрачивает свойства геостационарности.
Это предложение позволяет разгрузить ГСО, однако область, предлагаемая для использования семейством этих орбит, ограничивается величиной выше или ниже до 50 км около экваториальной ГСО.
Для устранения этого недостатка предложено решение эмуляции характеристик системы спутников на ГСО, то есть воспроизведение (эмулирования) эффекта неподвижности спутников относительно поверхности Земли с помощью спутников, размещенных на эллиптических синхронных орбитах, имеющих одинаковые наклонения, эксцентриситеты, аргументы перигея, гринвичские долготы восходящего узла и интервалы между прохождениями следующих друг за другом спутников этой гринвичской долготы. Например, патент №2223205 С2 B64G 1/10, Н04В 7/185 ЗАО «Информационный Космический Центр «Северная корона» «Система спутников на эллиптических орбитах, эмулирующих характеристики системы спутников на геостационарной орбите, содержащая орбитальную группировку искусственных спутников, размещенных на эллиптически наклонных орбитах с периодом обращения около двенадцати часов», авторы Витер В.В. и другие.
Данное техническое решение позволяет создавать эффект зависания КА над точкой поверхности Земли в неэкваториальной плоскости.
Однако недостатком такого решения является необходимость создания сложного и дорогостоящего комплекса связанных между собой системами связи КА и необходимость запускать их на строго согласованные орбиты.
Кроме того, при создании эффекта зависания спутников (мнимого по существу) за счет эмуляции их характеристик, существует временной интервал между приходами КА в точку мнимого зависания, который зависит от количества спутников на орбитах, которые участвуют в эмуляции характеристик геостационарного спутника. Существуют также ограничения по высоте точки эмулирования геостационарного спутника, связанные с тем что эта точка должна быть в апогее вытянутых орбит КА, что не позволяет использовать низкие высоты.
Техническое решение по патенту №2223205 выбрано в качестве прототипа.
Целью предлагаемого способа является расширение возможности геостационарного движения космических аппаратов не только в экваториальной плоскости, но и в параллельной ей неэкваториальной плоскости, на любой заданной географической широте.
По предлагаемому способу технически реальна возможность "подвешивать" КА над любой точкой земного шара на любой высоте на ограниченное время за счет расхода его массы или подвода энергии извне.
Для подобных аппаратов уже в настоящее время имеется ряд актуальных практических задач. Во всех странах мира с каждым годом возрастает количество динамических ситуаций, требующих наблюдения, контроля, а часто и управления конкретными видами действий.
В мирное время это экстремальные и чрезвычайные ситуации природного и техногенного происхождения, в основном, в области экологии. В таких ситуациях весьма актуальны задачи оперативной организации и осуществления непрерывного наблюдения, связи и управления на ограниченное время в различных районах поверхности суши и водных бассейнов. Особо ценно применение подобных КА в труднодоступных местностях и в районах, где выведены из строя обычные средства связи, где наземными и авиационными средствами оперативно организовать сбор информации, связь и управление практически не удается.
Все эти ситуации различаются по многим признакам: по их важности, опасности, темпам развития и, как следствие этого, по требуемой периодичности обновления информации и ее требуемому содержанию. Но, ввиду их динамичности, в большинстве случаев требуется непрерывное наблюдение за заданными районами в течение ограниченного времени.
Для сбора, обработки и передачи информации в перечисленных и в других ситуациях используются различные наземные стационарные и подвижные пункты наблюдения и управления, а также летательные аппараты: вертолеты, самолеты, искусственные спутники Земли, различающиеся по своим возможностям, ограничениям условий применения, техническим и экономическим характеристикам. Возможно также использование некоторых других известных видов летательных аппаратов, например, надводных и подводных кораблей, баллистических ракет, дирижаблей и других средств.
Однако по тактико-техническим и экономическим параметрам системы наблюдения и связи с помощью космических средств для решения большинства задач имеют неоспоримое преимущество перед всеми остальными средствами [Т.С.Келсо. «Основы геостационарной орбиты»].
В сложных, быстро меняющихся региональных и локальных ситуациях более реально можно рассчитывать на успешное применение одиночных управляемых ИСЗ с периодом обращения, равным периоду обращения Земли вокруг своей оси, оперативно запускаемых в заданный район на ограниченный период времени, соизмеримый с длительностью контролируемой ситуации или управляемой операции. Заслуживают внимания и исследования диапазона высот полета примерно 50-100 км.
Сущность предлагаемого способа размещения КА на ГСО в неэкваториальной плоскости заключается в следующем.
Космический аппарат выводят в точку околоземного пространства с заданными географической широтой и высотой над поверхностью Земли так, что угловая скорость вращения космического аппарата совпадает с угловой скоростью вращения Земли и поддерживают его движение в этой точке с помощью постоянно действующего двигателя с тягой, равной результирующей от силы притяжения Земли и центробежной силы, действующих на космический аппарат, и противоположной ей по направлению, причем вектор силы тяги проходит через центр масс космического аппарата.
Предлагаемый способ может быть реализован в различных конструктивных вариантах.
Например, устройство для реализации способа размещения космического аппарата на геостационарной орбите выполняют в виде космического аппарата, содержащего систему управления, систему ориентации, блок полезной нагрузки, служебные системы с двигательной установкой постоянного действия на качающемся подвесе, электрически связанным с системой контроля центра масс космического аппарата и системой обеспечения антиколлинеарности вектора силы тяги двигателя постоянного действия вектору результирующей силы от силы притяжения Земли и центробежной силы, действующих на космический аппарат, а двигатель постоянного действия оснащен системой дросселирования силы тяги в диапазоне изменений значения результирующей силы от силы притяжения Земли и центробежной силы, действующих на космический аппарат.
КА по предлагаемому способу выводят ракетой-носителем в заданную точку космического пространства как с круговой орбиты, так и с баллистической траектории. После включения двигательного блока КА корректируют радиус круговой орбиты КА и угловую скорость вращения КА таким образом, чтобы над заданной точкой земной поверхности соблюдалось условие геостационарного движения. При этом угловая скорость вращения Земли и КА совпадают, и КА как бы зависает над подстилающей точкой земной поверхности.
Поддержание летательного аппарата на заданной высоте над заданной точкой земной поверхности вне экваториальной геостационарной орбиты требует постоянного расхода топлива. Однако возможность размещения аппарата в наиболее удобной для его функционирования точке или ограниченном районе существенно повышает эффективность его применения, в частности, позволяет использовать его в средних и даже высоких географических широтах.
После выключения двигателя, удерживающего ИСЗ над заданной точкой поверхности Земли, этот ИСЗ, при выполнении некоторых условий, может оставаться на орбите обычного ИСЗ, продолжать полет без дополнительных затрат топлива и в дальнейшем снова переводиться в режим зависания над заданной точкой поверхности Земли.
Предлагаемый способ открывает область новых возможностей по видам маневров КА и характеристикам решаемых ими задач.
Существо предлагаемого способа иллюстрируют следующие рисунки.
Фиг.1 - вывод КА в точку околоземного пространства с заданными географической широтой и высотой над поверхностью Земли.
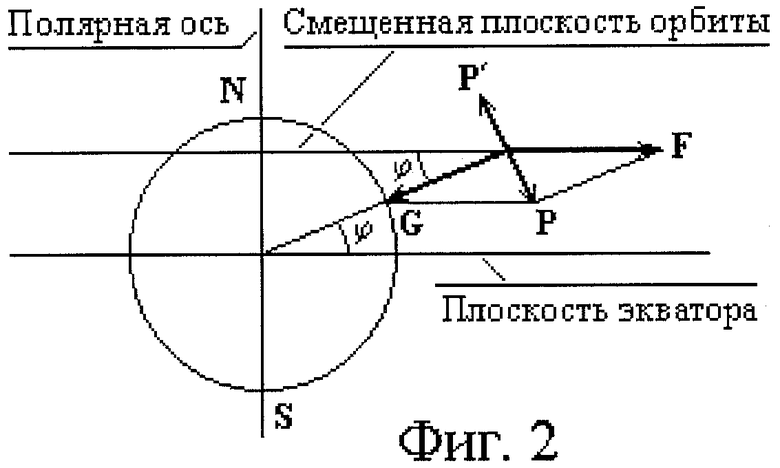
Фиг.2 - расчетная схема сил, действующих на неэкваториальный геостационарный КА.
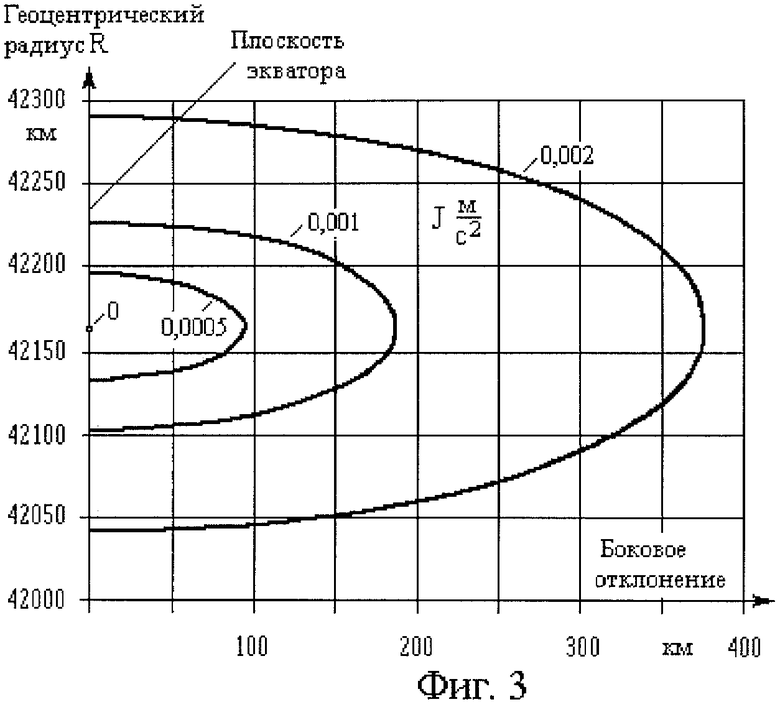
Фиг.3 - взаимная зависимость бокового отклонения от плоскости экватора и геоцентрического радиуса орбиты неэкваториального геостационарного КА при различных ускорениях J.
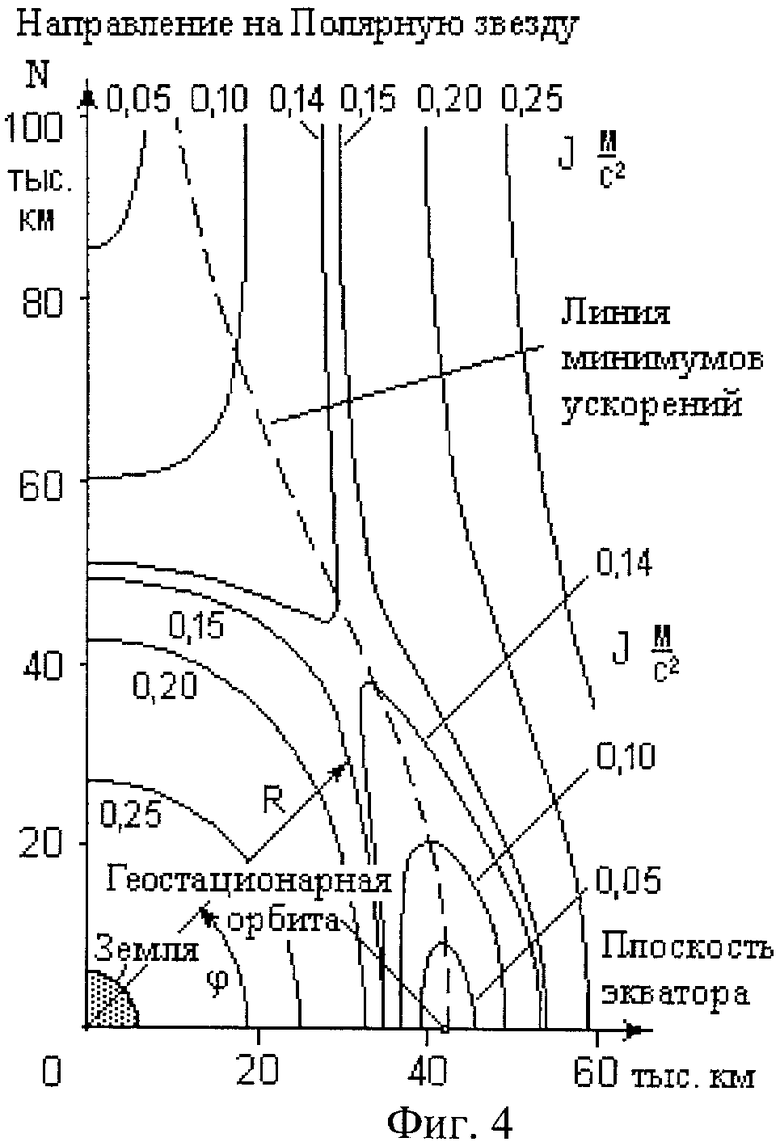
Фиг.4 - линии равных значений ускорений, удерживающих геостационарный КА на неэкваториальной орбите на различных геоцентрических радиусах r и географических широтах.
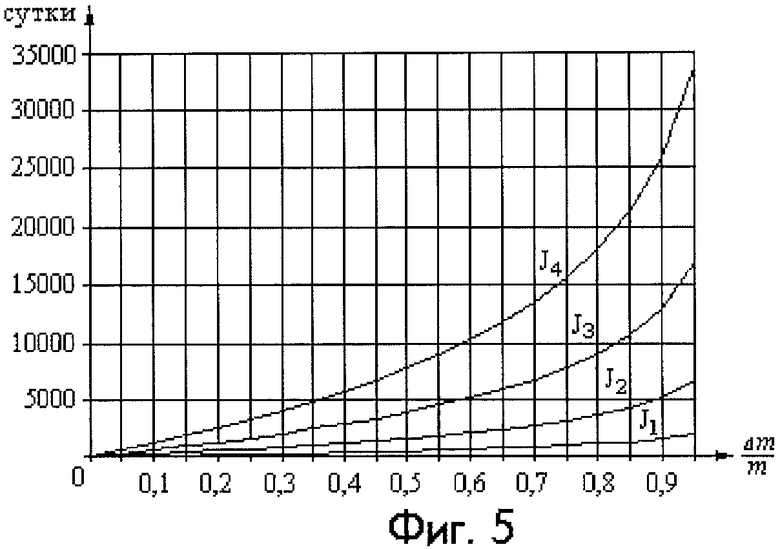
Фиг.5 - длительность поддержания режима зависания от относительного расхода массы КА при смещении спутника от экватора в меридиональном направлении на 10 км.
Удельные импульсы тяги: I1=3 км/с (химическое топливо), I2=10 км/с (ЭРД), I3=25 км/с, I4=50 км/с (ЭРД, ЯРД).
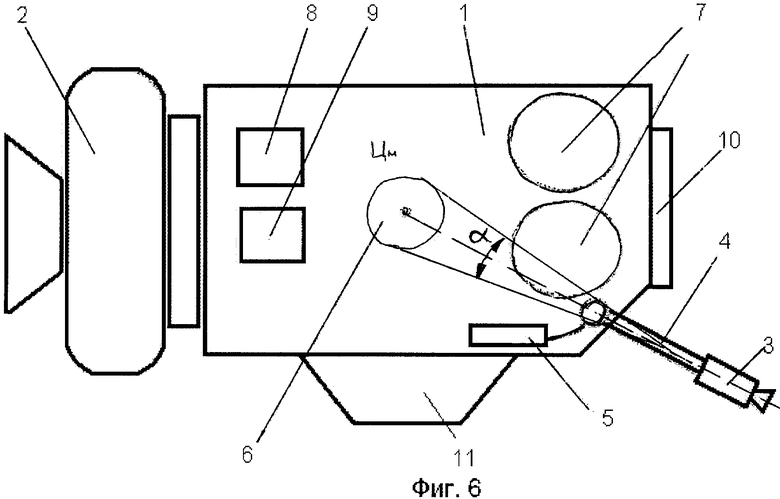
Фиг.6 - схема КА, устанавливаемого на неэкваториальную геостационарную орбиту.
Баллистические расчеты по оценке возможностей создания неэкваториальных геостационарных КА показывают следующие результаты.
Если к спутнику, движущемуся в плоскости экватора, приложить силу в плоскости, проходящей через ось вращения Земли, равновесие движения нарушится, и спутник перейдет на траекторию, лежащую вне плоскости экватора. Рассмотрим эту ситуацию при условии, что спутник продолжает двигаться с прежней угловой скоростью относительно оси вращения Земли (фиг.1).
На фиг.2: G - сила притяжения спутника Землей; F - центробежная сила,
Р' - их равнодействующая, φ - географическая широта точки зависания ИСЗ.
Чтобы удержать спутник в равномерном круговом движении в новой, смещенной плоскости орбиты, к нему следует приложить силу P', равную Р по величине и противоположную ей по направлению.
Величина Р=Р' определяется из уравнения:

Эта сила должна сообщать спутнику ускорение J, равное:

где r=R3+Н - геоцентрический радиус орбиты неэкваториального геостационарного ИСЗ, Н - высота его полета, R3 - радиус Земли.
С помощью этих уравнений можно рассчитать зависимость параметров смещенной круговой орбиты КА от величины приложенного к спутнику ускорения. График этой зависимости для малой окрестности геостационарной орбиты показан на фиг.4, для других круговых неэкваториальных геостационарных орбит - на фиг.3.
Из фиг.3 видно, что для смещения плоскости орбиты геостационарного спутника на 100 км от плоскости экватора требуется приложить к спутнику ускорение J порядка 0,05 см/сек2.
Оценим возможную длительность поддержания неэкваториального геостационарного КА на различных географических широтах и на различных высотах над Землей.
Суммарный импульс скорости ΔV=J*ΔT, затрачиваемый на поддержание такого спутника на географической широте φ на высоте Н в течение интервала времени ΔT, определяется из формулы:
где: g 0 R уд- удельный импульс,
m - начальная масса спутника,
Δm - расход массы спутника,
Δm/m - относительный расход массы спутника.
С помощью этой формулы может быть определена зависимость длительности поддержания режима зависания от относительного расхода массы КА при различных смещениях спутника от экватора в меридиональном направлении и при различных удельных импульсах. Результаты расчетов показаны на фиг.5.
Расчеты показывают, что вблизи экваториальной геостационарной орбиты поддержание неэкваториальных геостационарных КА возможно даже при использовании современных химических топлив в течение нескольких месяцев при расходовании от 10 до 20% их начальной массы. Для средних географических широт и высот от 30 до 50 тысяч километров эти сроки сокращаются на порядок.
В настоящее время уже существуют и используются на экваториальных геостационарных КА электрореактивные двигатели. Их применение может существенно улучшить технические характеристики неэкваториальных геостационарных КА.
Устройство КА 1 (фиг.6) для реализации предлагаемого способа включает блок 2 для выведения его в точку околоземного пространства с заданными географической широтой и высотой над поверхностью Земли, который содержит двигательную установку с необходимым запасом топливных компонентов, а также соответствующие служебные системы.
В конструкции неэкваториального геостационарного КА предусмотрен двигатель постоянного действия 3 на качающемся подвесе 4, содержащем вилку для размещения двигателя постоянного действия с электродвигателями, электрически связанными с системой контроля центра масс КА 5, и управляемыми таким образом, чтобы вектор действия силы постоянно проходил через центр масс КА Цм 0,5 с помощью отклонения на угол α.
Система контроля центра масс КА включает программное обеспечение расчета положения центра масс КА и вычисления данных для команд электродвигателям качающегося подвеса, введенное в бортовой процессор системы управления и датчики ускорений, разнесенные на максимально возможное расстояние в корпусе КА.
Область изменения центра масс КА 6 в процессе полета находится внутри угла качания подвеса, как условие обеспечения стабильного движения КА.
Система обеспечения антиколлинеарности (противоположной направленности) вектора силы тяги двигателя постоянного действия вектору результирующей силы от силы притяжения Земли и центробежной силы, действующих на КА, включает датчики ускорений, электрически связанных с бортовым процессором системы управления, который обеспечивает вычисление величины необходимого мгновенного значения силы тяги двигателя постоянного действия и вектора ее действия.
Вычисленные значения преобразовываются в исполнительные команды для системы ориентации КА и системы дросселирования двигателя постоянного действия.
Система дросселирования двигателя постоянного действия обеспечивает изменение силы тяги в заданном диапазоне значений, который равен или больше диапазона изменения величины результирующей силы от силы притяжения Земли и центробежной силы, действующих на космический аппарат, и включает, например, для двигателя на химических компонентах электроклапан в системе подачи компонентов топлива, связанный электрически с системой обеспечения антиколлинеарности вектора силы тяги двигателя постоянного действия вектору результирующей силы от силы притяжения Земли и центробежной силы, действующих на КА.
КА несет полезную нагрузку 7 для решения функциональных задач. КА снабжен источником энергии (запасом компонентов топлива для двигательной установки на химическом топливе) 8, системой управления 9 и другими необходимыми служебными системами 10. КА может иметь узел стыковки 11 с КА - заправщиком топлива для увеличения срока активного существования.
Технико-экономическую эффективность применения предлагаемого способа определяют:
при оценке экономической эффективности решения задач наблюдения и связи на заданной точке земной поверхности при реализации конкретного космического комплекса;
при оценке эффективности разгрузки ГСО вследствие расширения возможностей геостационарного способа движения на различных широтах с помощью предлагаемого устройства КА.
Группа изобретений относится к способу размещения космического аппарата на геостационарной орбите в неэкваториальной плоскости и к устройству для его реализации. Способ заключается в том, что космический аппарат выводят в точку околоземного пространства с заданными географической широтой и высотой над поверхностью Земли так, что угловая скорость вращения космического аппарата совпадает с угловой скоростью вращения Земли, и поддерживают его движение в этой точке с помощью постоянно действующего двигателя с тягой, равной результирующей от силы притяжения Земли и центробежной силы, действующих на космический аппарат, и противоположной ей по направлению. Вектор силы тяги проходит через центр масс космического аппарата. Устройство для реализации способа размещения космического аппарата на геостационарной орбите выполнено в виде космического аппарата, содержащего систему управления, систему ориентации, блок полезной нагрузки, служебные системы. Устройство оснащено двигателем постоянного действия на качающемся подвесе, электрически связанным с системой контроля центра масс космического аппарата и с системой обеспечения антиколлинеарности вектора силы тяги двигателя постоянного действия вектору результирующей силы от силы притяжения Земли и центробежной силы, действующих на космический аппарат. Двигатель постоянного действия оснащен системой дросселирования силы тяги в диапазоне изменения значения этой результирующей силы. Достигается расширение зоны геостационарного размещения спутника. 2 н.п. ф-лы, 6 ил.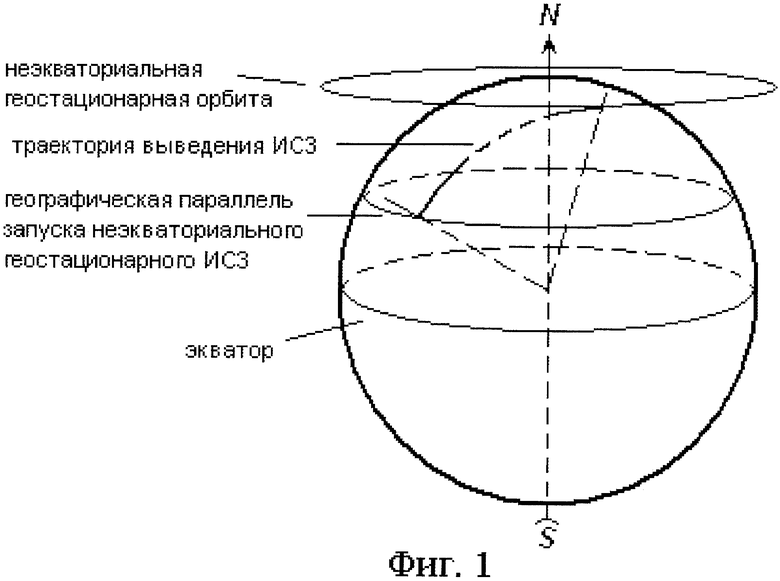
1. Способ размещения космического аппарата на геостационарной орбите в неэкваториальной плоскости, отличающийся тем, что космический аппарат выводят в точку околоземного пространства с заданными географической широтой и высотой над поверхностью Земли так, что угловая скорость вращения космического аппарата совпадает с угловой скоростью вращения Земли, и поддерживают его движение в этой точке с помощью постоянно действующего двигателя с тягой равной результирующей от силы притяжения Земли и центробежной силы, действующих на космический аппарат, и противоположной ей по направлению, причем вектор силы тяги проходит через центр масс космического аппарата.
2. Устройство для реализации способа размещения космического аппарата на геостационарной орбите, выполненное в виде космического аппарата, содержащего систему управления, систему ориентации, блок полезной нагрузки, служебные системы, отличающееся тем, что оно оснащено двигателем постоянного действия на качающемся подвесе, электрически связанным с системой контроля центра масс космического аппарата и с системой обеспечения антиколлинеарности вектора силы тяги двигателя постоянного действия вектору результирующей силы от силы притяжения Земли и центробежной силы, действующих на космический аппарат, а двигатель постоянного действия оснащен системой дросселирования силы тяги в диапазоне изменения значения этой результирующей силы.
| US 5183225 A, 02.02.1993 | |||
| US 6565043 A, 20.05.2003 | |||
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2021170C1 |
| Реактивный привод | 1983 |
|
SU1127978A1 |
| US 4955559 A, 11.09.1990 | |||
| RU 2058915 C1, 27.04.1996 | |||
| Сцепное приспособление для тележек к путеукладчику, транспортирующих рельсовую плеть | 1933 |
|
SU39817A1 |
| Устройство для приведения в действие отрезного станка к ленточному прессу | 1935 |
|
SU45199A1 |

