Изобретение относится к области вычислительных средств специального назначения и может использоваться в системах управления ориентацией космических аппаратов, орбитальных станций и целевых научных модулей при реализации программных разворотов.
Как известно, регулярная прецессия твердого тела представляет собой одновременное вращение этого тела вокруг некоторой неподвижной в абсолютном пространстве оси, называемой осью прецессии, и вокруг продольной оси тела. Продольная ось твердого тела обычно выбирается из конструктивных соображений и динамических его свойств, а именно соотношения моментов инерции. В частности, существует большой класс изделий ракетно-космической техники, имеющих по двум осям близкие значения моментов инерции и значительно отличающиеся от момента инерции относительно третьей оси; в этом случае третью соль определяют как продольную ось изделия. Под параметрами регулярной прецессии твердого тела понимаются прежде всего значение орта оси прецессии  и углы поворота твердого тела вокруг оси прецессии β и вокруг продольной оси α , которые обеспечивают перевод твердого тела из его начального углового положения в заданное конечное угловое положение. Взаимное расположение начального и конечного положений задается стандартными параметрами разворота (кватернионом разворота, матрицей направляющих косинусов, тремя углами Эйлера или Крылова).
и углы поворота твердого тела вокруг оси прецессии β и вокруг продольной оси α , которые обеспечивают перевод твердого тела из его начального углового положения в заданное конечное угловое положение. Взаимное расположение начального и конечного положений задается стандартными параметрами разворота (кватернионом разворота, матрицей направляющих косинусов, тремя углами Эйлера или Крылова).
Практически важным является случай свободного движения динамически симметричного твердого тела. Данное движение, называемое еще движением Эйлера-Пуансо, относится к классу регулярной прецессии твердого тела. С другой стороны, как показано в работе [1], данный тип движения обеспечивает разворот твердого тела с минимальными энергетическими затратами. Однако, в литературе показано лишь существование решения обозначенной краевой задачи и нигде не приводится оно само (имеется в виду решение или конкретный алгоритм его получения); в лучшем случае авторы ограничиваются приведением системы уравнений, определяющих искомое решение (при этом методы и средства разрешения системы уравнений не раскрываются). Между тем, процедура расчета параметров регулярной прецессии твердого тела может широко использоваться и в алгоритмах управления переориентацией космического аппарата (КА). В этом свете решаемая в данном изобретении техническая задача приобретает особую актуальность.
При управлении разворотом крупных массивных орбитальных КА (например, долговременных орбитальных станций или их отдельных модулей) очень важным показателем является расход рабочего тела на реализацию разворота. Вопросам оптимизации процесса переориентации КА уделено большое число работ. В первом приближении можно считать, что экономичный в этом смысле разворот КА должен выполняться в форме регулярной прецессии вокруг некоторой оси  положение которой в пространстве зависит от взаимного углового положения начального и требуемого конечного состояний КА.
положение которой в пространстве зависит от взаимного углового положения начального и требуемого конечного состояний КА.
Расчетные (программные) угловые скорости разворота определяются из выражений:


где T - заданное время разворота;
t - текущее время, отсчитываемое с начала разворота.
Из них видно, что для точного поддержания системой управления движения КА по конической траектории необходимо знать параметры регулярной прецессии  . Непосредственно на борту КА эти величины не измеряются, а относительное угловое расположение начального и конечного положений КА обычно задается стандартными параметрами разворота (например, кватернионом, определяющим вектор конечного поворота и угол поворота [2]). Из сказанного следует, что для реализации в автоматическом режиме экономичных способов разворота КА (например, [1] или [3]) система управления движением должна иметь в своем составе устройство, формирующее необходимые в процессе управления параметры регулярной прецессии
. Непосредственно на борту КА эти величины не измеряются, а относительное угловое расположение начального и конечного положений КА обычно задается стандартными параметрами разворота (например, кватернионом, определяющим вектор конечного поворота и угол поворота [2]). Из сказанного следует, что для реализации в автоматическом режиме экономичных способов разворота КА (например, [1] или [3]) система управления движением должна иметь в своем составе устройство, формирующее необходимые в процессе управления параметры регулярной прецессии  по компонентам кватерниона разворота, имеющимся в бортовой навигационной системе.
по компонентам кватерниона разворота, имеющимся в бортовой навигационной системе.
Предлагаемое изобретение и направлено на создание такого устройства, которое производит автоматическое преобразование стандартных параметров разворота (компонентов кватерниона разворота) в требуемые для формирования управляющих моментов (см. [1]) параметры регулярной прецессии.
Ближайшим аналогом данного изобретения является устройство, преобразующее одни параметры разворота твердого тела, а, именно, кватернион разворота, в другие, более удобные для управления угловым положением тела параметры, какими являются вышеописанные параметры регулярной прецессии. Оно необходимо при реализации способа, описанного в [1], для решения системы уравнений. Это устройство имеет и параметрические входы, определяющие инерционные характеристики твердого тела и необходимые для удовлетворения выходных параметров выбранному критерию оптимальности.
Недостатком известных аналогов и прототипа является отсутствие решения поставленной задачи в автоматическом режиме.
С целью автоматизации указанного преобразования параметров разворота в устройство формирования параметров регулярной прецессии твердого тела, включающее вход ввода параметров разворота, вход ввода момента инерции вокруг поперечной оси, вход ввода момента инерции вокруг продольной оси, выход единичного вектора оси прецессии, выход углов поворота, введены блок определения параметров вращения вокруг главной оси инерции, блок вычисления управляющей функции, блок определения поперечных компонент орта оси прецессии, блок анализа функции, блок формирования сигнала готовности, блок коммутации, блок логики и запоминающее устройство, при этом вход ввода параметров разворота связан с входами задания параметров разворота блока определения параметров вращения вокруг главной оси инерции, блока вычисления управляющей функции и блока определения поперечных компонент орта оси прецессии, вход ввода момента инерции вокруг поперечной оси связан с одноименными входами блока определения параметров вращения вокруг главной оси инерции и блока вычисления управляющей функции, вход ввода момента инерции вокруг продольной оси связан с одноименными входами блока определения параметров вращения вокруг главной оси инерции и блока вычисления управляющей функции, выход готовности блока определения параметров вращения вокруг главной оси инерции связан с входом разрешения блока вычисления управляющей функции, входом запуска блока анализа функции и маскирующим входом блока логики, выход параметров поворота вокруг продольной оси блока вычисления управляющей функции связан с одноименным входом блока определения поперечных компонент орта оси прецессии, выход промежуточных вычислений блока вычисления управляющей функции связан с информационным входом блока определения поперечных компонент орта оси прецессии, выход значения функции блока вычисления управляющей функции связан с информационным входом блока анализа функции и входом блока формирования сигнала готовности, выход углов поворота блока вычисления управляющей функции связан с одноименным входом блока коммутации, выход блока определения поперечных компонент орта оси прецессии связан с входом ввода поперечных компонент орта оси прецессии блока коммутации, выход блока анализа функции связан с входами ввода продольной составляющей орта оси прецессии блока вычисления управляющей функции и блока коммутации, выход блока формирования сигнала готовности связан с управляющим входом блока логики, сигнальный выход блока логики связан с логическим входом блока коммутации, стробирующий выход блока логики связан с входом стробирования запоминающего устройства, вход ввода орта оси вращения запоминающего устройства связан с одноименными выходами блока определения параметров вращения вокруг главной оси инерции и блока коммутации, вход ввода углов поворота запоминающего устройства связан с одноименными выходами блока определения параметров вращения вокруг главной оси инерции и блока коммутации, выходы запоминающего устройства являются выходами устройства в целом.
Выполнение указанного назначения достигается также тем, что в устройство формирования параметров регулярной прецессии твердого тела дополнительно введен блок преобразования, выход которого связан с входами задания параметров разворота блока определения параметров вращения вокруг главной оси инерции, блока вычисления управляющей функции и блока определения поперечных компонент орта оси прецессии, а его вход связан с входом ввода параметров разворота устройства
Представленное устройство имеет три входа и два выхода. В качестве основной исходной информации для формирования параметров регулярной прецессии берутся параметры разворота, выраженные в нашем случае реализации компонентами кватерниона разворота Λp. Два других входа являются параметрическими и задают инерционные характеристики твердого тела в виде значений моментов инерции относительно его продольной оси J1 и оси, лежащей в поперечной плоскости (поперечной оси) J. Их величины являются постоянными для данного твердого тела (например, для конкретного космического аппарата) и поэтому входят в критерий оптимальности (управляющую функцию) как параметры. В соответствии с выбранным критерием оптимальности на первом выходе устройства устанавливается три направляющих косинуса оси прецессии относительно связанных с твердым телом осей P1, P2, P3 и два значения углов α и β на втором выходе устройства. Связь между входными и выходными величинами может быть выражена следующими соотношениями:



где λ0, λ1, λ2, λ3 - компоненты кватерниона разворота Λp .
При этом предполагается, что λ0 ≥ 0, λ
Рассмотрим случай практической реализации, когда устройство предназначено для расчета вектора сопряженного управления, значение которого необходимо при двухимпульсном управлении разворотом твердого тела с одной осью симметрии по траектории "свободного движения". Критерием оптимальности является минимум расхода рабочего тела на управление, а его выполнение определяется условием, накладываемым на параметры регулярной прецессии:
I1α = (I-I1)βp1.
Тогда, в качестве управляющей функции может быть взята величина:
f = p1β(I1-I)/I1+α.
Параметры регулярной прецессии твердого тела, при которых значение управляющей функции f равно нулю, будут являться искомыми.
Приводим перечень фигур.
фиг. 1 - функциональная схема предлагаемого устройства;
фиг. 2 - функциональная схема предлагаемого устройства по пункту 2;
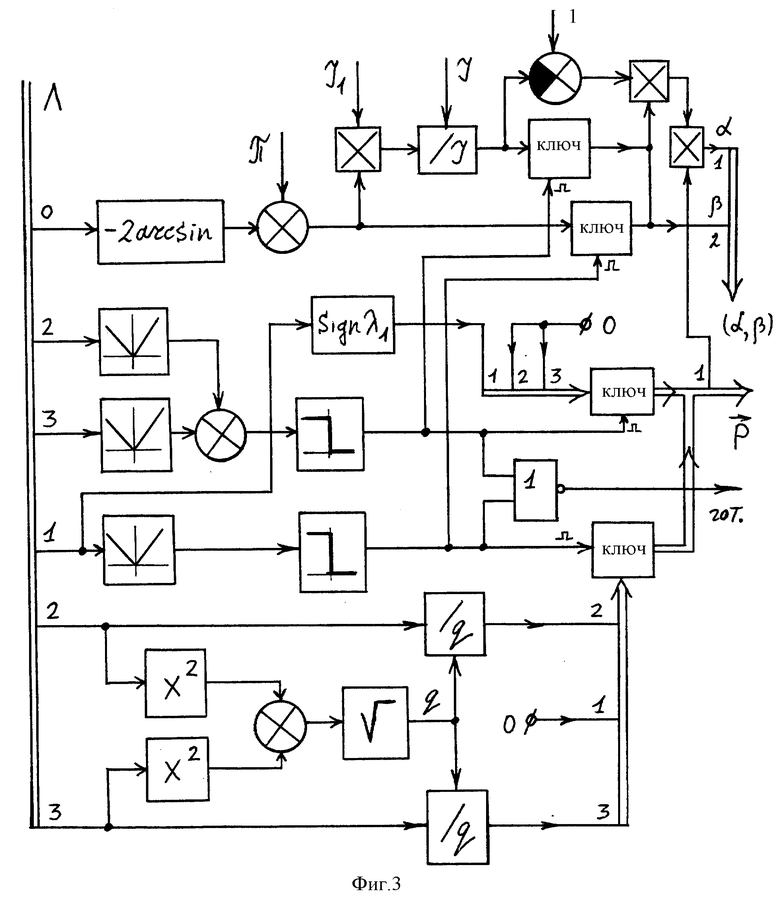
фиг. 3 - схема реализации БОПВГО (6);
фиг. 4 - схема реализации БВУФ (7);
фиг. 5 - схема реализации БОПОП (8);
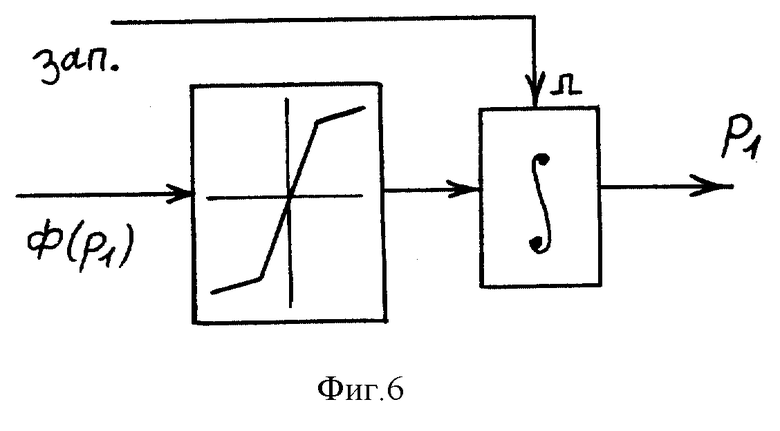
фиг. 6 - схема реализации БАВС (9);
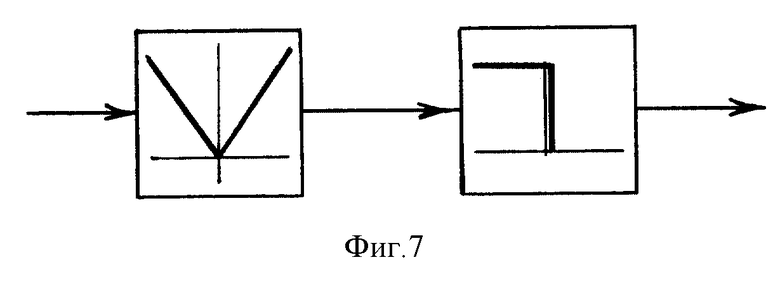
фиг. 7 - схема реализации БФСГ (10);
фиг. 8 - схема реализации БК (11);
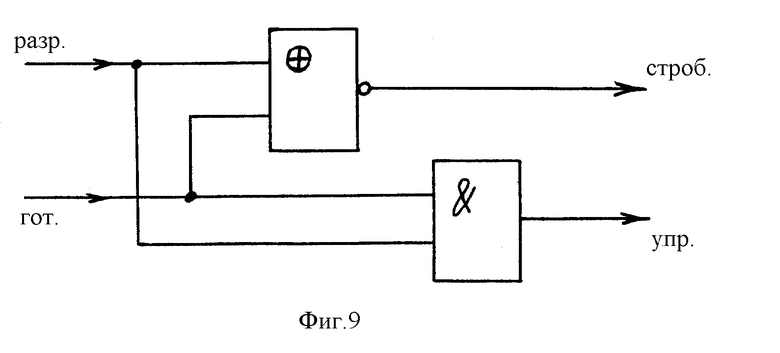
фиг. 9 - схема реализации БЛ (12);
фиг. 10 - схема реализации БП (14).
Пример реализации устройства представлен на фиг. 1, где обозначено 1 - вход ввода параметров разворота, 2 - вход ввода момента инерции вокруг поперечной оси, 3 - вход ввода момента инерции вокруг продольной оси, 4 - выход единичного вектора оси прецессии, 5 - выход углов поворота, 6 - блок определения параметров вращения вокруг главной оси инерции (БОПВГО), 7 - блок вычисления управляющей функции (БВУФ), 8 - блок определения поперечных компонент орта оси прецессии (БОПОП), 9 - блок анализа входного сигнала (БАВС), 10 - блок формирования сигнала готовности (БФСГ), 11 - блок коммутации (БК), 12 - блок логики (БЛ), 13 - запоминающее устройство (ЗУ), при этом вход 1 связан с входами задания параметров разворота БОПВГО (6), БВУФ (7) и БОПОП (8), вход 2 связан с входами задания момента инерции вокруг поперечной оси БОПВГО (6) и БВУФ (7), вход 3 связан с входами задания момента инерции вокруг продольной оси БОПВГО (6) и БВУФ (7), выход готовности БОПВГО (6) связан с входом разрешения БВУФ (7), входом запуска БАВС (9) и маскирующим входом блока логики (12), выход параметров поворота вокруг продольной оси БВУФ (7) связан с одноименным входом БОПОП (8), выход промежуточных вычислений БВУФ (7) связан с информационным входом БОПОП (8), выход значения функции БВУФ (7) связан с информационным входом БАВС (9) и входом БФСГ (10) формирования сигнала готовности, выход углов поворота БВУФ (7) связан с одноименным входом блока коммутации (11), выход БОПОП (8) связан с входом ввода поперечных компонент орта оси прецессии блока коммутации (11), выход БАВС (9) связан с входами ввода продольной составляющей орта оси прецессии БВУФ (7) и блока коммутации (11), выход БФСГ (10) связан с управляющим входом блока логики (12), сигнальный выход блока логики (12) связан с логическим входом блока коммутации (11), стробирующий выход блока логики (12) связан с входом стробирования ЗУ (13), вход ввода орта оси вращения ЗУ (13) связан с одноименными выходами БОПВГО (6) и блока коммутации (11), вход ввода углов поворота ЗУ (13) связан с одноименными выходами БОПВГО (6) и блока коммутации (11), выходы ЗУ (13) являются выходами 4 и 5 устройства в целом.
Функциональная схема устройства по пункту 2 представлена на фиг. 2, где обозначено 14 - блок преобразования, вход которого связан с входом 1 устройства, а его выход связан с входами задания параметров разворота БОПВГО (6), БВУФ (7) и БОПОП (8).
Реализация отдельных блоков и элементов предлагаемой системы выполнена на интегральных схемах и стандартных аналоговых модулях и представлена фигурами 3 - 10.
БОПВГО (6) (см. фиг. 3) распознает ситуацию, когда параметры разворота соответствуют вращению твердого тела вокруг главной оси инерции, и в случае ее подтверждения формирует на выходе "сигнал готовности" уровень логического нуля, определяет вокруг какой оси (продольной или поперечной) требуется производить поворот тела и в соответствии с этим формирует на информационных выходах искомые параметры регулярной прецессии  по соотношениям:
по соотношениям:
α = 0, β = π-2arcsinλ0;
2) λ

В противном случае на логическом выходе БОПВГО устанавливает логическую единицу, а информационные выходы переводит в разомкнутое состояние.
БВУФ (7) представлен на фиг. 4 и вычисляет параметры α и β, а также значение управляющей функции f, им соответствующее, в случае, когда параметры разворота не соответствуют вращению твердого тела вокруг главной оси инерции. Работа блока возможна только при наличии логической единицы на входе разрешения. Входы ввода параметров разворота, ввода момента инерции вокруг поперечной оси и ввода момента инерции вокруг продольной оси являются параметрическими. Задающим для БВУФ является вход ввода продольной составляющей орта оси прецессии, сигнал которого однозначно определяет значение функции Ф(P1) и параметры прецессии α и β . Функциональная связь Ф (P1) определяется соотношениями:


Для успешной их реализации необходимо, чтобы  . Обеспечение этого условия осуществляется стандартным блоком ограничения, стоящим на входе БВУФ; величина ограничения определяется компонентами кватерниона разворота и равна
. Обеспечение этого условия осуществляется стандартным блоком ограничения, стоящим на входе БВУФ; величина ограничения определяется компонентами кватерниона разворота и равна  .
.
На выходе промежуточных вычислений БВУФ устанавливается величина  , а на выходе параметров поворота вокруг продольной оси
, а на выходе параметров поворота вокруг продольной оси  сформируются значения
сформируются значения

БОПОП (8) предназначен для определения двух поперечных компонент орта направления прецессии P2 и P3 по параметрам разворота Λp и информации, поступающей от БВУФ (7), r,  в соответствии с выражениями:
в соответствии с выражениями:
БАВС (9) анализирует значение управляющей функции Ф и в зависимости от ее знака изменяет задающее для БВУФ воздействие P1 в большую или в меньшую сторону. Структурно БАВС состоит из последовательно соединенных усилителя с симметричной нелинейной характеристикой и интегратора. Работа блока начинается с наличия на входе запуска логической единицы, по которой интегратор начинает интегрирование по времени входной величины. В начальный момент времени на выходе БАВС установлен нулевой уровень (интегратор обнулен) P1=0.
БФСГ (10) состоит из модуля определения величины входного сигнала и компаратора. Он формирует на выходе логическую единицу в момент, когда Ф(P1)≈0.
БК (11) соединяет информационные входы ЗУ (вход ввода орта оси вращения и вход ввода углов поворота) с выходами, соответствующими параметрам регулярной прецессии  в случае разворота тела не вокруг главной оси инерции и формируемыми БВУФ, БАВС и БОПОП, при наличие логической единицы на управляющем входе блока. Коммутация сигналов осуществляется электронными ключами, выполненными в интегральном исполнении.
в случае разворота тела не вокруг главной оси инерции и формируемыми БВУФ, БАВС и БОПОП, при наличие логической единицы на управляющем входе блока. Коммутация сигналов осуществляется электронными ключами, выполненными в интегральном исполнении.
БЛ (12) формирует управляющие сигналы для блоков 11 и 13 исходя из состояния выходов готовности блоков 6 (сигнала "разр.") и 10 (сигнала "гот.") согласно выражениям
где & - знак операции логического умножения;
⊕ - знак "суммирования по модулю два";
черта сверху означает инвертирование.
ЗУ (13) фиксирует сформированные параметры регулярной прецессии твердого тела  по стробирующему сигналу БЛ и выдает их на выходы устройства 4, 5.
по стробирующему сигналу БЛ и выдает их на выходы устройства 4, 5.
С целью защиты предлагаемого устройства в случаях, когда вводимые в него параметры разворота не удовлетворяют условиям нормировки и неотрицательности скалярной части, в него дополнительно введен блок преобразования 14, который и осуществляет необходимые операции, а именно, умножение всех входных параметров разворота на знак скалярной части кватерниона и последующее нормирование параметров разворота. Входные и выходные величины связаны соотношениями: (см. фиг. 10)
(см. фиг. 10)
Рассмотрим работу системы.
Она начинается с анализа входных параметров разворота Λp блоком 6 и в случае их соответствия одному из частных случаев λ1 = 0 или λ и выдает их через выходы 4, 5 потребителю.
и выдает их через выходы 4, 5 потребителю.
В случае, когда λ1 ≠ 0 и λ а формирует сигнал разрешения алгоритмического решения уравнения Ф(P1)= 0 в соответствии с законом p1 = K∫Φ(p1)dt (K > 0) , реализуемым замкнутым контуром, образованным блоками 7 и 9. В исходном состоянии P1= 0. При наличии на входе разрешения БВУФ лог. "1" начинается вычисление углов α(p1) и β(p1) и значения управляющей функции Ф(P1), соответствующих текущему значению входа P1. Пока Φ(p1) ≠ 0, БАВС продолжает изменение аргумента функции P1. Как только |Φ(p1)| < d, переходной процесс прекращается, на выходе БФСГ устанавливается лог. "1", по промежуточным результатам вычислений r и параметрам поворота вокруг продольной оси
а формирует сигнал разрешения алгоритмического решения уравнения Ф(P1)= 0 в соответствии с законом p1 = K∫Φ(p1)dt (K > 0) , реализуемым замкнутым контуром, образованным блоками 7 и 9. В исходном состоянии P1= 0. При наличии на входе разрешения БВУФ лог. "1" начинается вычисление углов α(p1) и β(p1) и значения управляющей функции Ф(P1), соответствующих текущему значению входа P1. Пока Φ(p1) ≠ 0, БАВС продолжает изменение аргумента функции P1. Как только |Φ(p1)| < d, переходной процесс прекращается, на выходе БФСГ устанавливается лог. "1", по промежуточным результатам вычислений r и параметрам поворота вокруг продольной оси  блок 8 вычисляет параметры P2 и P3, блок логики формирует на управляющем выходе лог. "1", по которой происходит коммутация вычисленных параметров регулярной прецессии с входами ЗУ. На стробирующем выходе БЛ появляется импульс, по которому ЗУ фиксирует сформированные блоком коммутации параметры регулярной прецессии
блок 8 вычисляет параметры P2 и P3, блок логики формирует на управляющем выходе лог. "1", по которой происходит коммутация вычисленных параметров регулярной прецессии с входами ЗУ. На стробирующем выходе БЛ появляется импульс, по которому ЗУ фиксирует сформированные блоком коммутации параметры регулярной прецессии  Здесь d - малая величина, определяемая зоной нечувствительности блока формирования сигнала готовности.
Здесь d - малая величина, определяемая зоной нечувствительности блока формирования сигнала готовности.
Эффективность предлагаемого устройства определяется прежде всего его назначением. Все операции по решению системы сложных трансцендентных уравнений и оптимизации полученных значений выполняются автоматически на существующей элементной базе и доступными средствами, а само устройство является функционально законченным узлом для систем управления ориентацией и движением космических аппаратов.
Литература
1. Бранец В.Н., Черток М.Б., Казначеев Ю.В. Оптимальный разворот твердого тела с одной осью симметрии. // Космические исследования, 1984, т. 22, вып. 3.
2. Бранец В.Н., Шмыглевский И.Н. Применение кватернионов в задачах ориентации твердого тела, М., 1973.
3. Левский М.В. Задача оптимального управления терминальной ориентацией КА. // Космические исследования, 1993, т. 31, вып. 4.
4. Якубовский С. В. Аналоговые и цифровые интегральные схемы. М., "Советское радио", 1985.
5. Тетельбаум И.М., Шнейдер Ю.Р. Практика аналогового моделирования динамических систем, М., "Энергоатомиздат", 1987.





Изобретение предназначено для автоматического преобразования стандартных параметров разворота - компонентов кватерниона разворота - в требуемые параметры регулярной прецессии, необходимые при реализации пространственных разворотов космического аппарата. Технический результат изобретения заключается в автоматизации выполнения преобразований, необходимых для формирования требуемых параметров. Устройство содержит блок определения параметров вращения вокруг главной оси инерции, блок вычисления управляющей функции, блок определения поперечных компонент орта оси прецессии, блок анализа функции, блок формирования сигнала готовности, блок коммутации и блок логики. Полученные в результате преобразования значения фиксирует запоминающее устройство. Все операции по решению системы сложных трансцендентных уравнений и оптимизации полученных значений производятся автоматически на существующей элементной базе и доступными средствами, а само устройство является функционально законченным узлом для систем управления ориентацией и движением космических аппаратов. 1 з.п. ф-лы, 10 ил.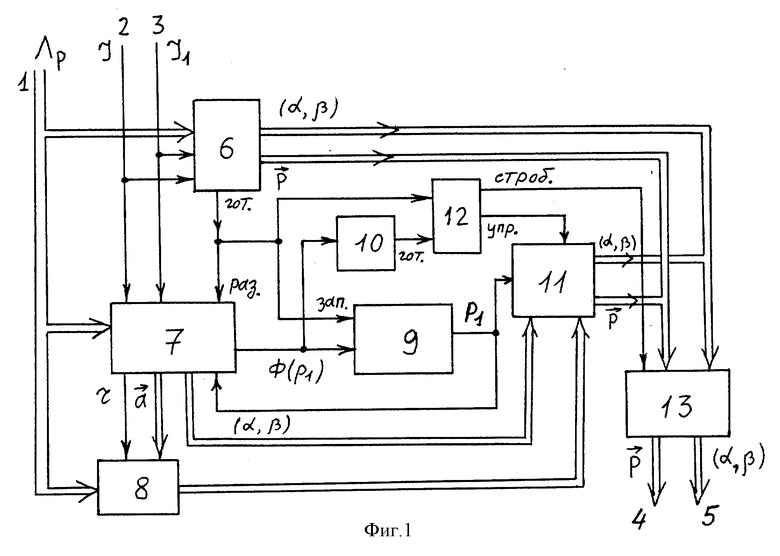
| СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2006431C1 |
| Установка для производства белкововитаминного концентрата | 1973 |
|
SU474556A1 |
| Бранец В.Н | |||
| и др | |||
| Оптимальный разворот твердого тела с одной осью симметрии | |||
| - Космические исследования, 1984, т | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Бранец В.Н | |||
| и др | |||
| Применение кватернионов в задачах ориентации твердого тела | |||
| - М.: Наука, 1973, гл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Левский М.В | |||
| Задача оптимального управления терминальной ориентацией КА | |||
| - Космические исследования, 1993, т.31, вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
