Изобретение относится к области силовой электроники и может быть использовано при разработке преобразователей на базе трехфазных автономных инверторов напряжения, предназначенных для питания систем асинхронного частотно-регулируемого электропривода.
Известны способы управления трехфазными преобразователями для электропривода, базирующиеся на поэтапном изменении количества импульсов в полуволне выходного напряжения, причем указание числа импульсов происходит дискретно, что приводит к нежелательным броскам тока в силовых цепях преобразователя в моменты дискретного переключения [1, 2]. Известен также способ гибкого нелинейного управления широкорегулируемыми преобразователями [3], при котором благодаря специальной нелинейной модуляции продолжительностей основных и модулирующих сигналов управления, формируемых в тактовых точках, обеспечивается плавный безударныйпереход от одной формы выходного сигнала к другой. Средняя частота коммутации вентилей преобразователя при этом постоянна, на всем диапазоне регулирования обеспечивается постоянство отношения величины напряжения к частоте. Но при этом в спектре выходного напряжения преобразователя на всем диапазоне регулирования присутствует порой значительная по амплитуде пятая гармоническая составляющая, негативно влияющая на характер протекания процессов в системе регулируемого электропривода и создающая, в частности, значительный по величине тормозной момент асинхронному короткозамкнутому электродвигателю, входящему в состав таких систем, что особенно нежелательно в зоне пониженных частот, где двигатель наиболее чувствителен к влиянию таких факторов. Известно также, что для повышения надежности осуществления режима пуска преобразователя, нагруженного на асинхронный двигатель, закон управления в кратковременном пусковом режиме должен отличаться от базового закона управления с U/F = const.
Цель изобретения - улучшение на всем диапазоне управления гармонического состава выходного напряжения преобразователя, а также динамики системы в пусковом режиме и в диапазоне пониженных выходных частот, достигаемое за счет изменения на начальной частоте Fo в К раз, а на частоте LFo в М раз продолжительности тактовых подинтервалов и соответствующего этому увеличения количества импульсов в полуволне кривой, а также повышение надежности осуществления процесса пуска преобразователя, нагруженного на асинхронный двигатель.
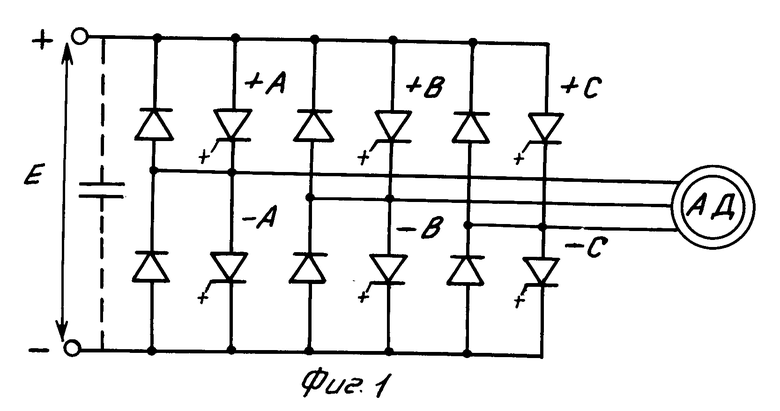
Поставленная цель достигается тем, что при управлении по указанному способу, обеспечивающему N-кратное, начиная с частоты Fo, связанное регулирование выходных частоты и напряжения преобразователя, заключающемся в том, что основные вентили разных фаз и групп преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл. град. в последовательности +A, -С, +B, -А. +C, -В. Для каждого вентиля в течение одного полупериода от 0 до 180 эл. град. формируют интервал проводимости вентиля, в течение другого полупериода от 180 до 360 эл. град формируют интервал закрытого состояния вентиля, на центральных внутри полупериодов тактовых интервалах от 60 до 120 и от 240 до 300 эл. град. формируют модулирующие сигналы управления, разноименные с соответствующим полупериодом управления, число которых последовательно уменьшается с ростом выходной частоты преобразователя F. Генерирование указанных модулирующих сигналов производят в серединах тактовых подинтервалов с длительностью τ, формирование каждого i-го, считая от опорной точки и до тактовой точки, модилирующего сигнала управления осуществляют при изменении выходной частоты преобразователя от Fо до граничной частоты Fi'. В номинальном режиме работы на поддиапазонах выходных частот, при которых Fi'' ≥ F > Fi+1 < Fi' > Fi'' > Fi+1', продолжительности λ всех модулирующих
сигналов управления равны между собой, а на частотных поддиапазонах, на которых Fi' ≥ F > Fi'', наряду с основным массивом модулирующих сигналов управления с продолжительностью λ, в отмеченных тактовых точках формируют тактовый модулирующий сигнал с длительностью λ '. В диапазоне выходных частот Fo÷0,8NFo в центрах указанных тактовых интервалов формируют центральные модулирующие сигналы управления с продолжительностью, равной 1/30F (12 эл. град. ), на каждой половине тактового интервала внутри каждого из крайних отрезков 24-градусных продолжительностей середину указанных отрезков выбирают в качестве вышеуказанной опорной точки, находят начальное число модулирующих сигналов управления внутри указанных отрезков как частное от деления 0,4N/К, округляя его в большую сторону в случае дробной величны указанного частного, синхронизируют середину упомянутых 24-градусных отрезков с концом и с началом двух соответствующих центральных тактовых подинтервалов (в случае четного числа модулирующих сигналов внутри указанных отрезков), или же с серединой центрального тактового подинтервала (в случае нечетного количества подинтервалов внутри 24-градусных отрезков), в качестве вышеупомянутых тактовых точек используют границы указанных 24-градусных отрезков, в диапазоне выходных частот преобразователя Fo ÷ LFo продолжительность τ тактовых подинтервалов принимают равной
τ = 
В диапазоне выходных частот преобразователя LFo ÷ 0,8 NFoпродолжительность τ определяют как
τ = 
В пусковом режиме работы, при 2Fo > F ≥ Fo, значения вышеупомянутых граничных частот, переходных от одного поддиапазона управления к другому, определяют соответственно как
F =F
=F
F = F
= F В этом режиме λ=τ -
В этом режиме λ=τ -  при Fi' ≥ Fi'' λ′=1/30F-1τ -
при Fi' ≥ Fi'' λ′=1/30F-1τ -  . В номинальном режиме работы преобразователя при LFo ≥ F > 2Fo значения граничных частот Fi'' и Fi' находят соответственно как
. В номинальном режиме работы преобразователя при LFo ≥ F > 2Fo значения граничных частот Fi'' и Fi' находят соответственно как
F =F
=F
F =F
=F При 0,8NFo ≥ F > LFo значения частот Fi'' и Fi' находят соответственно как
При 0,8NFo ≥ F > LFo значения частот Fi'' и Fi' находят соответственно как
F =F
=F
F = F
= F при этом на диапазоне номинального режима работы преобразователя до частоты 0,8NFo при Fi' ≥ F > Fi''
при этом на диапазоне номинального режима работы преобразователя до частоты 0,8NFo при Fi' ≥ F > Fi''
λ=τ - 
λ' = 1/30 F - 1 τ - 1/24 FoNm, при Fi'' ≥ F > Fi+1' λ =  -
-  , а когда NFo > F ≥ 0,8NFo λ= 1/6F - 1/6FoN, где значения l, m и n соответственно равны % l = i-1, m = 2i-1 и n = i для вариантов управления с четным числом модулирующих сигналов внутри 24-градусных отрезков, i = i-1,5, m = Z(i-1) и n = i-0,5 для вариантов управления с нечетным количеством модулирующих сигналов управления среди упомянутых отрезков.
, а когда NFo > F ≥ 0,8NFo λ= 1/6F - 1/6FoN, где значения l, m и n соответственно равны % l = i-1, m = 2i-1 и n = i для вариантов управления с четным числом модулирующих сигналов внутри 24-градусных отрезков, i = i-1,5, m = Z(i-1) и n = i-0,5 для вариантов управления с нечетным количеством модулирующих сигналов управления среди упомянутых отрезков.
На фиг. 1 приведена схема основных соединений силовых цепей тиристорного преобразователя напряжения, выполненного на базе полностью управляемых тиристоров, нагруженного на асинхронный электродвигатель АД; на фиг. 2 - регулировочная характеристика преобразователя и кривая изменения относительной продолжительности тактовых подинтервалов; на фиг. 3-5 - временные диаграммы, иллюстрирующие опорные варианты формирования управляющих сигналов на вентили инвертора; на фиг. 6 - блок-схема системы управления преобразователем.
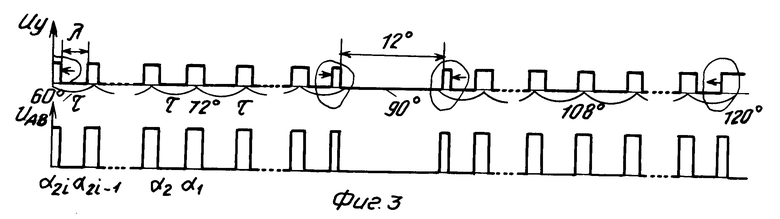
Временные диаграммы иллюстрируют три базовых алгоритма формирования управляющих сигналов на вентили преобразователя в процессе регулирования, а также соответствующие им кривые линейного выходного напряжения UАВ. Управляющие сигналы UУ поступают на находящийся в положительном проводящем полупериоде управления вентиль +А катодной группы трехфазной мостовой схемы преобразователя, при этом положительная величина UУ (основной сигнал управления) соответствует проводящему состоянию вентиля, а нулевое значение UУ (модулирующий сигнал управления) - закрытому состоянию (следует помнить, что вентили являются полностью управляемыми). Формирование разноименных с соответствующим полупериодом управления модулирующих сигналов управления с продолжительностями λ и задающими величину выходного напряжения преобразователя. На всем диапазоне регулирования Fo÷NFo осуществляется (внутри средних на полупериодах тактовых интервалах (60-120 и 240-300 эл. град.) в центрах тактовых подинтервалов (фиг. 3, тонкие дуги снизу), имеющих продолжительность τ, зависящую внутри частотного диапазона Fo÷0,8NFо от значений выходной частоты F и определяемому в диапазоне выходных частот преобразователя Fo÷LFo как
τ =  а в диапазоне выходных частот преобразователя LFo÷0,8NFoпродолжительность τ определяют как
а в диапазоне выходных частот преобразователя LFo÷0,8NFoпродолжительность τ определяют как
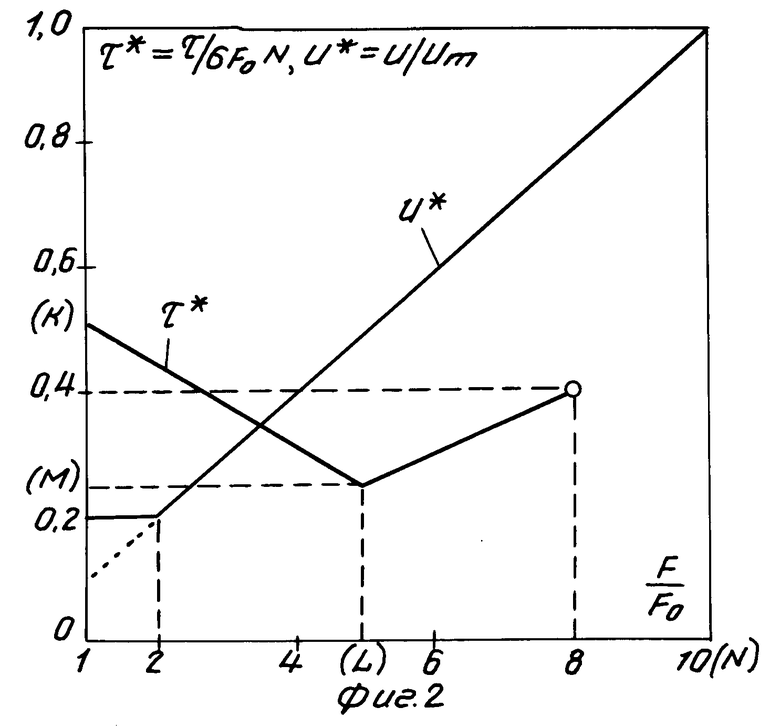
τ =  (см. построенные на фиг. 2 кривые зависимости изменения относительной продолжительности τ *= τ / τm от частоты F применительно к величине диапазона регулирования N = 10 и значениям упомянутых коэффициентов К = 0,5, L = 5 и M = 0,25). На частоте 0,8NFo конечная величина продолжительности τ определяется для всех режимов (при любом N) как τ = 0,4/6NFo, соответственно для анализируемого режима на начальной частоте Fo τ = 0,5/6NFo, а на частоте LFo(5Fo) τ = 0,25/6NFo (продолжительность тактовых подинтервалов при рассматриваемом способе управления изменяется по двум линейным зависимостям границей перехода от одной зависимости к другой является частота LFo).
(см. построенные на фиг. 2 кривые зависимости изменения относительной продолжительности τ *= τ / τm от частоты F применительно к величине диапазона регулирования N = 10 и значениям упомянутых коэффициентов К = 0,5, L = 5 и M = 0,25). На частоте 0,8NFo конечная величина продолжительности τ определяется для всех режимов (при любом N) как τ = 0,4/6NFo, соответственно для анализируемого режима на начальной частоте Fo τ = 0,5/6NFo, а на частоте LFo(5Fo) τ = 0,25/6NFo (продолжительность тактовых подинтервалов при рассматриваемом способе управления изменяется по двум линейным зависимостям границей перехода от одной зависимости к другой является частота LFo).
Важной особенностью рассматриваемого алгоритма формирования управляющих сигналов на вентили преобразователя является тот факт, что на всем диапазоне регулирования в середине каждого из упомянутых 60-градусных интервалов формируется центральный модулирующий сигнал, причем на большей части диапазона регулирования, в зоне Fo÷0,8NFo, продолжительность этого сигнала находится как 1/30F (12 эл. град.), а в зоне повышенных частот 0,8LFo÷NFo указанная величина находится как λ = 1/6F-1/6NFo. Формирование основного массива модулирующих сигналов производится в этом случае внутри крайних на тактовых интервалах отрезков 24-градусных продолжительностей симметрично относительно тактовых точек с координатами в 72 и 108 эл. град. Внутри тактовых интервалов в зоне Fo÷0,8NFo середины отмеченных 24-градусных отрезков синхронизируются с соответствующими границами центральных тактовых подинтервалов (в случае четного числа модулирующих сигналов внутри указанных отрезков) или же с серединой центрального внутри упомянутых
отрезков тактового подинтервала (в случае нечетного количества модулирующих сигналов внутри отрезков). Величины предварительно задаваемых упомянутых выше в выражениях для определения продолжительности тактовых подинтервалов коэффициентов К и М, принимающих значения от нуля до единицы, а также значения коэффициента L (0,8N > L >i), являются весьма важными параметрами рассматриваемого режима управления. Так, значение коэффициента К характеризует собой степень изменения продолжительности тактовых подинтервалов на начальной выходной частоте преобразователя Fo по сравнению с продолжительностью тактового интервала 1/6F = 60 эл. град., наблюдаемой в верхней точке частотного диапазона, на частоте NFo, на которой полуволна выходного напряжения формируется из одного импульса. Чем выше абсолютное значение коэффициента К, тем короче на начальной выходной частоте продолжительность подинтервалов и тем больше количество модулирующих сигналов внутри тактовых интервалов, тем из большего числа импульсов формируется на начальной выходной частоте полуволна выходного напряжения преобразователя. Общее начальное число модулирующих сигналов (без центрального) внутри упомянутых отрезков определяется из выражения 0,4N/K. Например, при N = 10 и К = 0,5 на начальной частоте внутри 24-градусных отрезков будет формироваться по восьми модулирующих сигналов управления. В случае, когда указанное частное от деления является дробной величиной, начальное количество модулирующих сигналов управления находится округлением в большую сторону. Если отмечено (в том числе полученное путем округления в большую сторону) начальное число сигналов является нечетной величиной, то, поскольку при регулированиии происходит поэтапное по два изменение числа модулирующих сигналов, количество модулирующих сигналов будет
нечетным и далее, при этом середина центрального внутри указанных отрезков тактового подинтервала жестко синхронизируется с серединой соответствующего отрезка. В другом случае, когда начальное число сигналов четное с центрами 24-градусных отрезков синхронизируются соответствующие границы двух центральных тактовых подинтервалов. Именно этому варианту соответствуют приведенные на фиг. 3-5 временные диаграммы работы.
Конкретное значение параметра К должно задаваться, исходя из требований к динамическим свойствам преобразова- тельной системы и к гармоническому составу ее выходного напряжения в области пусковых выходных частот, руководствуясь тем правилом, что большее число импульсов в выходной полуволне на начальной частоте (меньшее К) способствует улучшению гармонического состава выходного напряжения и динамических свойств системы.
Важными параметрами режима управления, характеризующими работу системы в средней части частотного диапазона, являются коэффициенты М и L. Заданием требуемого значения L выбирается точка (зона) диапазона регулирования, в которой необходимо обеспечить требуемую частоту коммутации вентилей и соответствующий гармонический состав выходного напряжения, что задается соответствующим значением вышеупомянутого коэффициента М. Наиболее целесообразно выбирать близкие к оптимальному значения коэффициентов L и М для той части диапазона регулирования, в которой система электропривода с преобразователем частоты в качестве исполнительного органа функционирует наиболее продолжительно. Процесс регулирования частоты выходного сигнала преобразователя как в пусковом, так и в номинальном режимах работы базируется в рассматриваемом случае на постоянной поэтапной вариации длительностей основных и модулирующих сигналов управления, формируемых в тактовых точках, соответствующих краям упомянутых выше отрезков 24-градусных продолжительностей. Отмеченный принцип формирования управляющих сигналов, существенной особенностью которого является непрерывное отождествление (кодирование) продолжительностей формируемых в тактовых точках основных и модулирующих управляющих сигналов с длительностью основного массива сигналов. За счет этого осуществляется плавный безударный переход от одного поддиапазона управления к другому, может быть поэтому определен как широтно-кодовый. Ввиду того, что на начальной (пусковой) частоте выбор продолжительности тактовых подинтервалов, задаваемых величиной коэффициента К, может осуществляться произвольно, и поэтому произвольными могут быть начальное число модулирующих сигналов и количество выходных импульсов в полуволне выходного напряжения, рассматриваемый способ формирования управляющих сигналов на вентили преобразователя может быть определен как асинхронный.
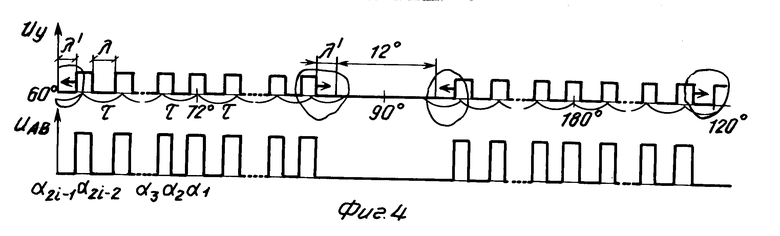
Внутри поддиапазонов регулирования, на которых в тактовых точках формируются основные сигналы управления, регулирование величины выходного напряжения осуществляется путем изменения продолжительностей λ модулирующих сигналов по определенным зависимостям. На поддиапазонах, на которых (фиг. 4) в тактовых точках формируются модулирующие сигналы управления с варьируемой длительностью λ', продолжительность λ остальных модулирующих сигналов находится в соответствии с другими функциональными зависимостями. Граничные значения частот Fi' и Fi'', переходных от одного поддиапазона регулирования к другому, определяется при этом через соответствующие параметры режима управления.
Известно, что одним из наиболее экономичных и часто применяемых в номинальных режимах работы законов управления преобразователями для систем частотно-регулируемого асинхронного электропривода является управление по закону постоянства отношения величины напряжения к частоте, при котором (фиг. 2) для частотного диапазона номинального регулирования 2Fo÷NFo = 10Fo, величина напряжения растет прямо пропорционально с увеличением выходной частоты преобразователя. Известно также, что в кратковременном пусковом режиме работы преобразователя, нагруженного на асинхронный электродвигатель, относительная величина напряжения должна быть существенно повышена по сравнению с номинальным режимом, в этом случае в диапазоне пусковых частот целесообразно поддерживать величину напряжения повышенной и постоянной, а в качестве верхней границы диапазона пусковых частот принимать частоту, равную удвоенной начальной частоте Fo (диапазон Fo÷2Fo на фиг. 2). Таким образом, в пусковом режиме работы преобразователя в диапазоне частот Fo÷2Fо значения граничных частот и параметров управляющих сигналов, через которые реализуется требуемый закон управления, должны быть определены как:
F =F
=F
F = F
= F в этом режиме λ=τ -
в этом режиме λ=τ -  при Fi' ≥ F > Fi'' λ′=1/30F-1τ -
при Fi' ≥ F > Fi'' λ′=1/30F-1τ -  . В номинальном режиме работы преобразователя при LFo ≥ F > 2Fo значения граничных частот Fi'' и Fi' находят соответственно как
. В номинальном режиме работы преобразователя при LFo ≥ F > 2Fo значения граничных частот Fi'' и Fi' находят соответственно как
F =F
=F
F = F
= F При 0,8NFo ≥ F > LFo значения частот Fi'' и Fi' находят соответственно как
При 0,8NFo ≥ F > LFo значения частот Fi'' и Fi' находят соответственно как
F =F
=F
F = F
= F При этом на диапазоне номинального режима работы преобразователя до частоты 0,8NFo при Fi' ≥ F >Fi''
При этом на диапазоне номинального режима работы преобразователя до частоты 0,8NFo при Fi' ≥ F >Fi''
λ=τ -  , λ′=1/30F-1τ - 1/24FoNm, при Fi'' ≥ F > F'i+1 λ =
, λ′=1/30F-1τ - 1/24FoNm, при Fi'' ≥ F > F'i+1 λ =  -
-  , а когда NFo > F ≥ 0,8NFо λ= 1/6F - 1/6 FoN, где значения l, m и n соответственно равны % l = i-1, m = 2i-1 и n = i для вариантов управления с четным числом модулирующих сигналов внутри 24-градусных отрезков, l = =i-1,5, m = 2(i-1) и n = i-0,5 для вариантов управления с нечетным количеством модулирующих сигналов управления среди упомянутых отрезков.
, а когда NFo > F ≥ 0,8NFо λ= 1/6F - 1/6 FoN, где значения l, m и n соответственно равны % l = i-1, m = 2i-1 и n = i для вариантов управления с четным числом модулирующих сигналов внутри 24-градусных отрезков, l = =i-1,5, m = 2(i-1) и n = i-0,5 для вариантов управления с нечетным количеством модулирующих сигналов управления среди упомянутых отрезков.
Во всех вышеприведенных зависимостях параметр i характеризует количество модулирующих сигналов управления, формируемых внутри половин упомянутых 24-градусных отрезков, включая центральный по каждом отрезке модулирующий сигнал для вариантов управления с нечетным количеством модулирующих сигналов управления внутри отрезков.
На первом, начиная с пусковой частоты Fo, поддиапазоне регулирования, алгоритм формирования управляющих сигналов и начальное число управляющих модулирующих сигналов i внутри половин отрезков должны определяться следующим образом. В первую очередь находится величина 0,4N/К, показывающая при округлении в большую сторону число модулирующих сигналов управления внутри упомянутых 24-градусных отрезков, а также характер этого числа (четное оно или нечетное). Находят частное от деления 0,2N/К, характеризующее начальное значение i, при этом в случае дробной величины 0,2N/К полученное значение округляется до ближайшего целого числа в большую сторону. Исходя из полученного значения i, определяются соответствующие данным значениям i, N, К, L и М величины граничных частот Fi'' и Fi'. Указанные величины должны определяться по представленным выше зависимостям, описываемым пусковой режим работы преобразователя. В случае, когда найденное таким образом первое значение Fi'' окажется меньше пусковой частоты Fo, алгоритм формирования управляющих сигналов на первом поддиапазоне регулирования, в зоне Fi' > F ≥ Fo, должен соответствовать варианту управления при Fi' ≥ F > Fi'' (фиг. 4). В противном случае управляющие модулирующие сигналы должны формироваться в зоне Fi'' > F ≥ Fo по второму и упомянутых алгоритмов (фиг. 3). Следует еще раз отметить, что в диапазоне пусковых частот преобразователя Fo÷2Fo все параметры режима управленрия должны определяться в соответствии с соотношениями, описывающими именно пусковой режим работы.
В соответствии с вышесказанным применительно к выбранному в качестве примера режиму управления с N = 10, К = 0,5; L = 5 и М = 0,25 начальное значение параметра i для анализируемого варианта определится как i = 0,2N/К = 4, которое в данном конкретном случае является целым числом (в случае дробного частного от деления начальное i находится округлением в большую сторону). Частное от деления 0,4N/К = 8 является целым четным числом, соответственно четно начальное количество модулирующих сигналов внутри отрезков, что является важным фактором для дальнейшего определения параметров режима управления. Поскольку в первой зоне управления F4'' > F ≥ Fo, начальный, начиная со стартовой частоты преобразователя, алгоритм формирования соответствует форме управляющих сигналов (фиг. 3), который после частоты F4'' = 1,041Fo сменится вторым опорным алгоритмом (фиг. 4), границей которого будет частота F4' = 1,343Fo, после которой значение индекса i уменьшается на единицу (i = 3). Дальнейший переход от одного поддиапазона регулирования к другому в пусковом режиме производится на частоте F3'' = 1,491Fo. Значение следующей по порядку граничной частоты F3' лежит выше верхней границы пускового режима (выше частоты 2Fo), поэтому дальнейшее определение Fi'' и Fi' должно производиться уже по другим из вышеприведенных зависимостей, характеризующим номинальный режим управления применительно к диапазону частот, ограниченному сверху частотой LFo. Соответственно по другим зависимостям, начиная с частоты 2Fo, должны определяться продолжительности модулирующих сигналов управления λ и λ '. Определенные подобным образом значения следующих по порядку граничных частот в номинальном режиме работы преобразователя соответственно равны: F3' = 2,232Fo, F2'' = 3,000Fo. Следующее по порядку значение граничной частоты лежит выше базового значения LFo = 5Fo, поэтому, начиная с
отмеченной частоты, на верхнем частотном диапазоне изменение τ и определение значений граничных частот должно осуществляться по другим, приведенным в тексте описания выше, зависимостям. Соответствующая величина верхней граничной частоты, лежащей в этом поддиапазоне, равна F2'= 5,662Fo. Начиная с этой частоты и до частоты 0,8NFo, внутри каждой половины каждого из 24-градусных отрезков формируется по одному модулирующему сигналу управления (i = 1) с продолжительностью λ = 1/24(0,8/F - 1/FoN) = 1/24(0,8/F - 1/10Fo), уменьшающийся до нуля на частоте 0,8NFo.
В случае нечетного начального количества модулирующих сигналов внутри отрезков, имеющего место, например, при параметрах N = 10, К = 0,6(0,4N/К = 6,66-7) середина 24-градусных отрезков синхронизируется с серединой центрального тактового подинтервала. Значения граничных частот, переходных от одного поддиапазона регулирования к другому, при этом определяются по другим из приведенных выше зависимостей и для упомянутого режима (N = 10, К = 0,6, L = 5 и M = 0,25) соответственно равным в пусковом режиме F4' = 1,346Fo, F3'' = 1,537Fo; на первом диапазоне номинального регулирования F3' = 2,710Fo; на втором диапазоне номинального регулирования F2'' = 6,395Fo, F2' = 7,103Fo.
Временные диаграммы, иллюстрирующие процесс формирования сигналов управления на верхней части диапазона регулирования, когда 0,8NFo ≅ F < NFo, изображены на фиг. 5. В этом случае в центрах тактовых интервалов формируется по одному центральному модулирующему сигналу управления с последовательно уменьшающейся длительностью, определяемой как λ= 1/6F-1/6FoN. В этом режиме работы целесообразно обеспечить улучшение гармонического состава выходного напряжения (исключение из спектра пятой гармонической составляющей) путем формирования дополнительной последовательности модулирующих сигналов управления (пунктир на фиг. 5). Дополнительные сигналы формируются на крайних 30-градусных участках полупериодов управления, внутри зон 0-30, 150-180, 180-210 и 330-360 эл. град. Местоположение ближних к границам полупериодов фронтов дополнительных модулирующих сигналов управления определяют соответственно как 12 и 168 и как 192 и 348 эл. град. Длительность γ дополнительных сигналов управления определяется в соответствии с зависимостью
γ =  эл. град.
эл. град.
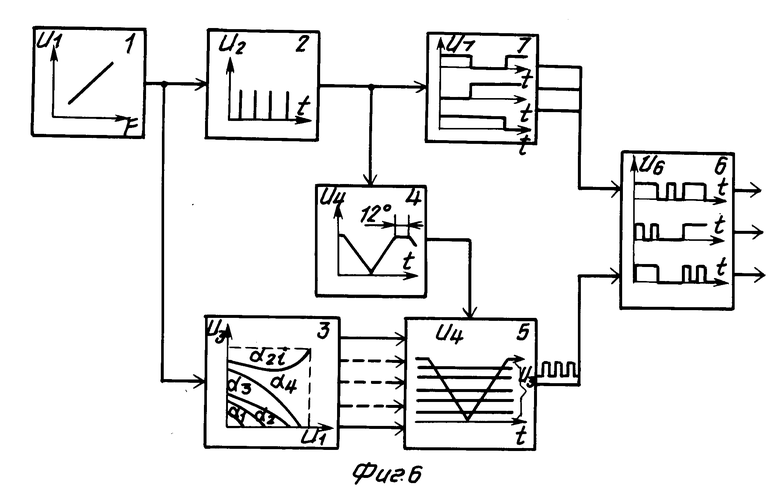
Достаточно сложные преимущественно нелинейные зависимости, характеризующие режим проведения приемов описанного способа управления, целесообразно осуществлять при помощи современных цифровых (микропроцессорных) средств управления. На фиг. 6 представлена блок-схема системы управления преобразователем, выполненной по вертикальному принципу, базовые блоки которой строятся на цифровой основе. Ниже приводится характеристика состава системы и принципа ее функционирования.
При помощи блока задания частоты 1 осуществляется задание требуемой выходной частоты преобразователя, на его выходе формируется сигнал U1, пропорциональный значению выходной частоты, который поступает на входы тактового генератора 2 и N/К-канального по выходу функционального преобразователя 3. Частота следования импульсов генератора 2 определяет частоту выходного сигнала блока развертки (генератора симметричного 24-градусного пилообразного напряжения с 12-градусными полочками в верхней части) 4, которая на всем диапазоне регулирования в 10 раз выше выходной частоты преобразователя. Сигнал блока 4 постоянно сопоставляется в блоке формирования управляющих импульсов 5 с выходными сигналами U3 функционального преобразоваателя 3, величина которых пропорциональна текущим значениям положений фронтов управляющих сигналов и выходных импульсов α1÷ α2i внутри тактовых интервалов. Значения α предварительно определяются расчетным путем из соотношений, характеризующих режим формирования управляющих сигналов как для пускового, так и для номинального диапазонов регулирования. Следует учитывать, что:
α1 = 72o - ( τ-λ)/2, α2 = α1 - λ,
α3 = α1 - τ,.... α2i = α2i-1 - λ. В моменты равенства текущих значений сигналов блоков 3 и 4 (фиг. 6) блоком 5 вырабатываются команды по формированию фронтов управляющих (и выходных) импульсов, которые распределяются по соответствующим вентилям преобразователя в соответствии с принятым опорным законом 180-градусного управления при помощи логического распределителя управляющих импульсов 6, соединенного своими тактовыми входами с соответствующими выходами трехразрядного регистра 7, работа которого на всем диапазоне регулирования синхронизируется тактовыми импульсами генератора 2.
Таким образом, закон формирования управляющих сигналов на вентили трехфазного мостового преобразователя позволяет обеспечить на всем диапазоне регулирования полное исключение из спектра выходного напряжения наиболее нежелательной пятой паразитной гармоники. На большей части диапазона регулирования указанный эффект обеспечивается наиболее экономичным фазо-импульсным методом, без осуществления дополнительных коммутаций в силовой схеме. Также достигается за счет увеличенного количества управляющих и выходных сигналов на полупериоде в зоне низких и средних выходных частот улучшение динамических свойств системы в указанных зонах. На всем диапазоне регулирования осуществляется плавный безударный переход от одного поддиапазона регулирования к другому. Благодаря двухзонному заданию продолжительности тактовых подинтервалов описанный способ обладает достаточной универсальностью, позволяя обеспечить требуемые частоту переключения вентилей и спектральный состав выходного сигнала в практически любых желаемых зонах управления. Видоизменение номинального закона управления в зоне пусковых частот позволяет повысить надежность осуществления весьма важного и сложного режима пуска преобразователя, нагруженного на асинхронный электродвигатель. Отмеченные преимущества могут быть с эффектом использованы при создании преобразователей как для специальных, так и для общепромышленных систем частотно-регулируемого электропривода, в том числе высоковольтных преобразовательных систем.

Использование: в силовой электронике. Сущность: в процессе управления преобразователем, регулируемым в номинальном режиме по закону постоянства отношения величины напряжения к частоте, формируют внутри центральных на полупериодах управления тактовых интервалов 60 - градусных продолжительностей модулирующих сигналов управления переменной длительности, определяющей величину выходного напряжения преобразователя, которые формируются в центрах соответствующих тактовых подинтервалов. В серединах указанных тактовых интервалов на четырех пятых частях, считая от начальной частоты, всего диапазона регулирования, формируют дополнительный модулирующий сигнал управления 12 - градусной продолжительности. Формирование основного массива модулирующих сигналов управления осуществляют внутри крайних на тактовых интервалах 24 - градусных отрезков. Опорными точками синхронизации являются середины указанных отрезков, синхронизируемые с соответствующими границами центральных тактовых подинтервалов или же с серединой центрального тактового подинтервала. Продолжительности тактовых подинтервалов изменяют в функции частоты по кусочно - линейной зависимости, определяемой соответствующими коэффициентами, характеризующими режим управления. 1 з.п.ф-лы, 6 ил.
 F >F
F >F (F
(F > F
> F > F
> F ), продолжительности λ всех модулирующих сигналов управления равны между собой, а на частотных поддиапазонах, на которых F
), продолжительности λ всех модулирующих сигналов управления равны между собой, а на частотных поддиапазонах, на которых F
τ = 
в диапазоне выходных частоты преобразователя LF0 - 0,8NF продолжительность τ определяют как
τ = 
в пусковом режиме работы при 2F0 > F ≥ F0 значения упомянутых граничных частот, переходных от одного поддиапазона управления к другому, определяют соответственно как
F =F
=F ,
,
F =F
=F .
.
в этом режиме λ=τ -  , при F
, при F ≥F>F″ λ′=1/30F-1τ -
≥F>F″ λ′=1/30F-1τ -  ,
,
F и F
и F
а в номинальном режиме работы преобразователя при LF0 ≥ F > 2F0значения граничных частот F =F
=F находят соответственно как
находят соответственно как
F =F
=F
F и F
и F
при 0,8NF0 ≥ F > LF0 значения частот F = F
= F находят соответственно как
находят соответственно как
F =F
=F
при этом на диапазоне номинального режима работы преобразователя до частоты 0,8NF0 при Fi≥ F > F λ=τ -
λ=τ -  ,
,
λ′ = 1/30F - lτ - 1/24 FoNm;
при F F > F
F > F
λ =  -
- 
при NF0 > F ≥ 0,8NF0 λ = 1 / 6F - 1 / 6F0N,
где l = i - 1, m = 2i - 1, n = i - для управления с четным числом модулирующих сигналов внутри 24-градусных отрезков,
l = i - 1,5, m = 2 (i - 1), n = i - 0,5 - для управления с нечетным количеством модулирующих сигналов управления среди упомянутых отрезков;
K - число, в которое изменяется продолжительность тактовых подынтервалов и соответствующее этому изменению количество импульсов в полуволне выходной кривой на начальной части F0 напряжения питания системы энергопривода от преобразователя;
M - число, в которое изменяется продолжительность тактовых подынтервалов и соответствующее этому изменению количество импульсов в полуволне выходной кривой на частоте LF0 питания системы электропривода от преобразователя.
 эл.град. эл.град.
эл.град. эл.град.| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ изменения времени срабатывания системы АРУ усилителей | 1960 |
|
SU149234A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
