Изобретение относится к силовой электронике и может быть использовано при управлении преобразователями, питающими системы асинхронного частотно-регулируемого электропривода,
Известны способы управления преобразователями для электропривода на базе трехфазных автономных инверторов напряжения, обеспечивающие плавное безударное изменение формы кривой выходного напряжения в процессе регулирования системы. Однако постоянство средней частоты коммутации вентилей инвертора приводит при этих вариантах управления к достаточно быстрому уменьшению числа импульсов в полуволне выходной кривой. Известен также способ управления преобразователем, в котором предложено модулировать продолжительность тактовых подинтерва- лов, внутри которых формируются модулирующие сигналы управления, по нелинейной зависимости благодаря чему повышается количество импульсов в полуволне выходной кривой в зоне средних и повышенных выходных частот Однако непосредственное использование подобного режима управления, особен о при больших значениях индекса N вепичины диапазона
х|
VJ
СЛ 00
го
О
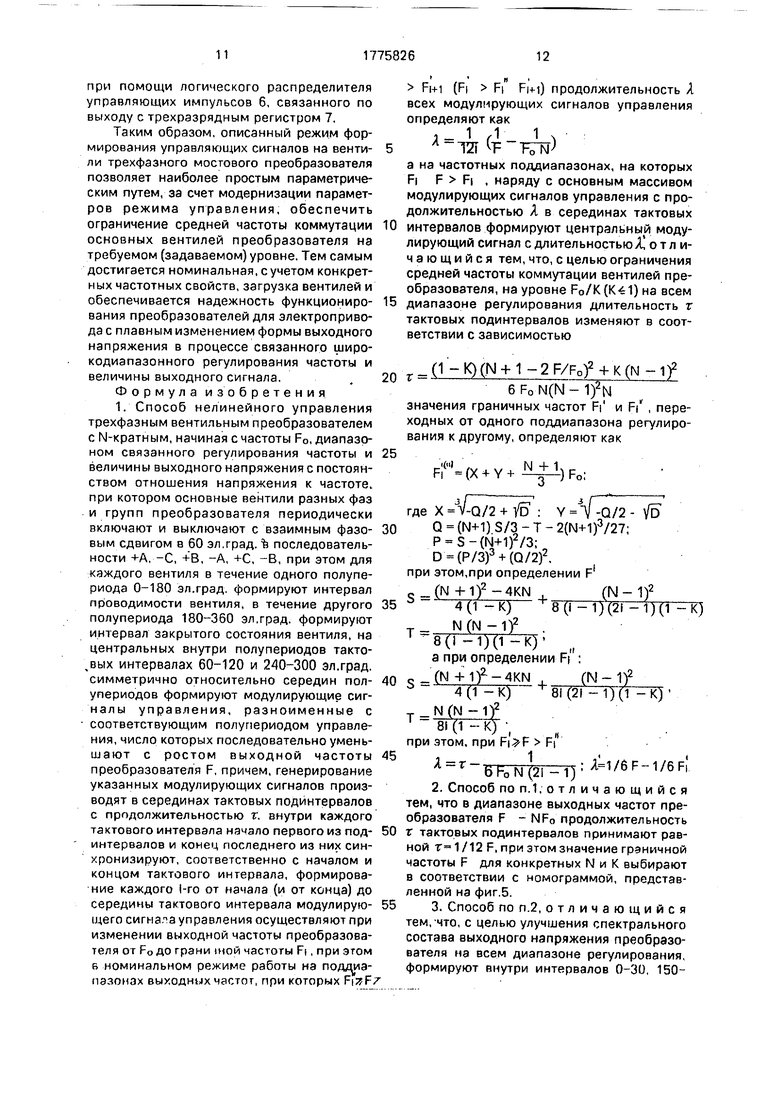
регулирования, априорно приводит при этом к значительному снижению продолжительности т подинтервэлов и к соответствующему росту средней частоты коммутации вентилей инвертора. Так, как показано на фиг.2 пунктиром для двух значений индекса N диапазона регулирования (N 6 и N 10), если в первом случае величина г снижается до уровня 0,49 от То, имеющей место на начальной частоте F0, то во втором Tmtn 0,33 TO, то есть, если в первом случае максимальная величина средней частоты коммутации вентилей примерно в 2 раза выше опорной частоты, то во втором случае - уже в три раза. С ростом N эта разница еще более увеличивается (так, например, при N- 20 ,181 То, при этом средняя частота коммутации вентилей более чем в пять раз выше опорной частоты).
Целью изобретения является ограничение средней частоты коммутации вентилей
F0N ,
преобразователя на уровне (где величина коэффициента К 0 заранее задается исходя из частотных свойств используемых силовых вентилей).
Поставленная цель достигается тем, что при управлении по указанному способу, обеспечивающему N-кратное, начиная с частоты Fo, связанное регулирование частоты и величины выходного напряжения преобразователя, при котором основные вентили разных фаз и групп преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл.град., при этом для каждого основного вентиля от 0 до 180 эл.град. формируют положительный полупериод проводимости, а от 180 до 360 эл.град. формируют отрицательный полупериод закрытого состояния, на центральных тактовых интервалах от 60 до 120 и от 240 до 300 зл.град. симметрично относительно середин полупериодов формируют модулирующие сигналы управления, разноименные с соответствующим полупериодом управления, разноименные с соответствующим полупериодом управления, число которых уменьшается с ростом выходной частоты F, причем генерирование указанных модулирующих сигналов производят в серединах тактовых подинтервалов с. продолжительностью т, находящейся в нелинейной зависимости в функции выходной частоты F, на которые разбиваются тактовые интервалы, начало каждого первого из подинтервалов и конец последнего из них синхронизируют соответственно с началом и концом соответствующего тактового интервала, формирование каждого 1-го от
начала до середины тактового интервала модулирующего сигнала управления осуществляют при изменении выходной частоты преобразователя от начальной F0 до гранич- ной частоты FI, при этом на поддиапазону выходных частот, при которых FI F Fi+1 (Fi FI FI -И) продолжительность Я всех модулирующих сигналов управления определя11 1 ют как (р - р .гД а на частотных
поддиапазонах,на которых . продолжительность всех, за исключением центральных, модулирующих сигналов управления
находят ()FoN. а длительность Я центрального на каждом тактовом интервале сигнала управления находят
11
как А вт - 2 (i - 1) г - бда Fo N,
на всем диапазоне регулирования продолжительность т тактовых подинтервалов изменяют в соответствии с функциональной зависимостью (1 - К) (N + 1 - 2 F/F0)2 + К (N - 1)2
eFoN(N-l)2,
а значения граничных частот FI и FI ,переходных от одного поддиапазона регулирования к другому, определяют как:
г
30
Fr-CX + Y+N+l)Fo.
где х /0/2 + 70 , Y V-Q/2 - vfr, Q (N+1)S/3 - Т - 2(N+1)3/27, P S-(N+1)2/3,
при этом при определении FI :
.(
(N-1)2
S4 (У-К) +8(i -1)(2i -1}(1 -К)
N(N-I)2 . 8(1 -1)(1 -К) „ а при определении FI :
o-fN-M)(N-1)2
Ь4 (1 - К) +8(2i -1)(1 -К)
-г N (N - 1)2 81(1 - К)
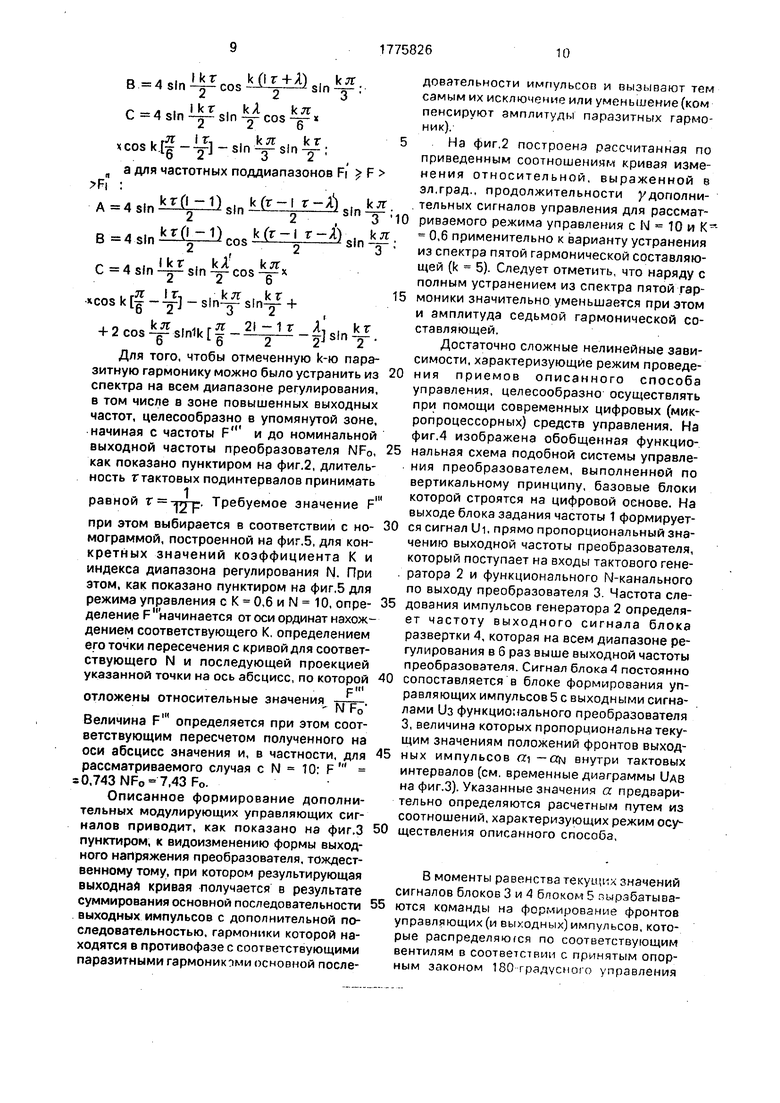
На фиг. 1 приведена упрощенная схема основных соединений силовых цепей тири- сторного преобразователя напряжения, вы- полненного на базе полностью управляемых тиристоров, нагруженного на асинхронный электродвигатель; на фиг.2 показаны кривые изменения относительной длительности тактовых подинтервалов применительно к величинам общего диапазона регулирования N 6 и N 10; на фиг.З - временные диаграммы, иллюстрирующие
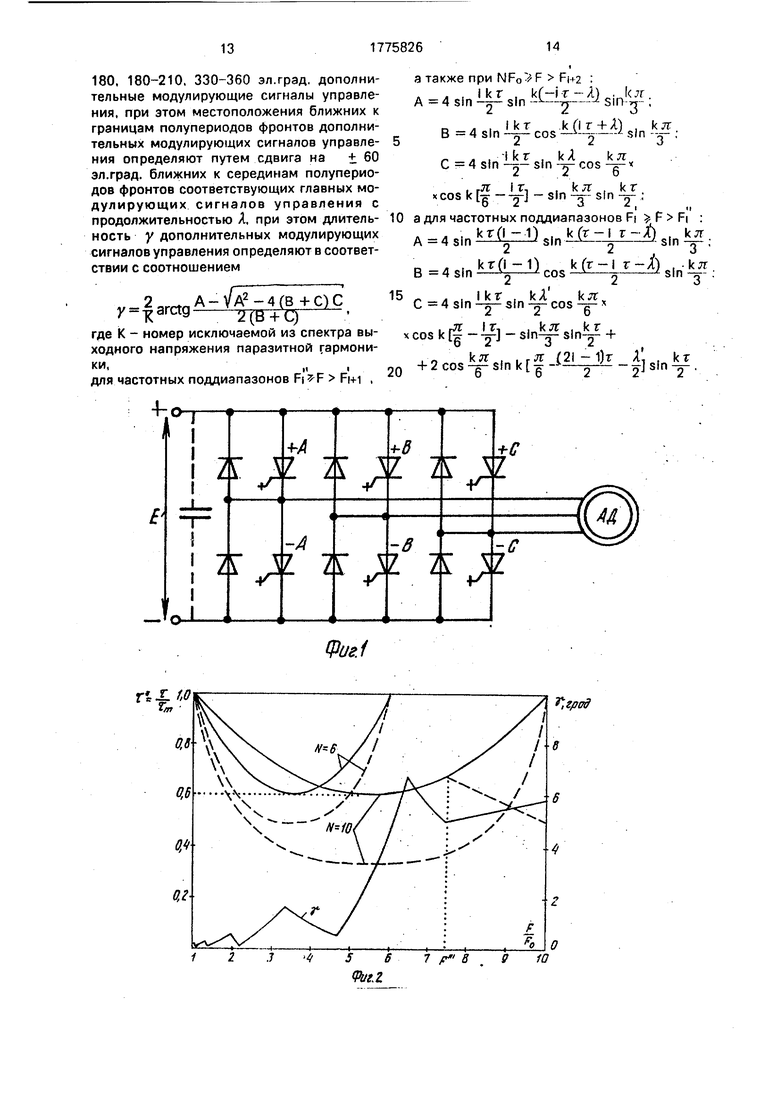
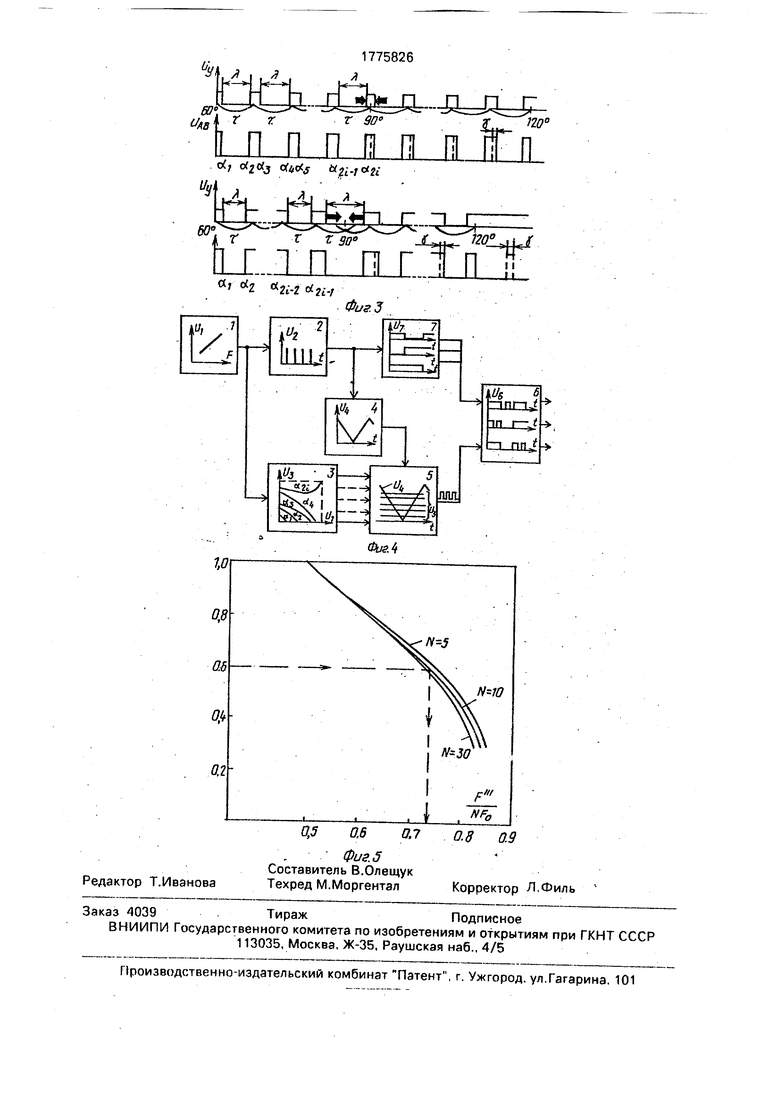
два опорных режима формирования управляющих сигналов на вентили инвертора: на фиг.4 - функциональная схема системы управления преобразователем; на фиг.5 - номограмма, предназначенная для определения верхней граничной частоты.
На временных диаграммах, приведенных на фиг.З, показаны два базовых алгоритма формирования управляющих сигналов Uy на вентили преобразователя в соответствии с описываемым способом управления, а также соответствующие им кривые линейного выходного напряжения UAB. Приведенные здесь управляющие сигналы Uy поступают на находящийся в положительном проводящем полупериоде управле- ния вентиль + А катодной группы трехфазной мостовой схемы преобразователя, при этом положительная величина Uy (основной сигнал управления) соответствует проводящему состоянию вентиля, а нулевое значение Uy (модулирующий сигнал управления)- закрытому состоянию. Формирование разноименных с соответствующим полупериодом управления модулирующих управляющих сигналов с продолжительностью Л определяющей величину выходного напряжения преобразователя, на всем диапазоне регулирования F0 - NF0 осуществляется при этом внутри средних на полупериодах тактовых интервалах (60-120 и 240-300 эл.град.) в центрах тактовых под- интервалов, показанных на фиг.З тонкими дугами снизу, имеющих переменную продолжительность т, зависящую от текущих значений выходной частоты F и определяемую как
7(1-K)(N-H-2F/F0)+K(N-1)2
6 Fo N(N - 1)2
(см. построенные на фиг.2 кривые изменения относительной зависимости т от частоты F применительно к величинам диапазона регулирования N 6nN 10H значению коэффициента К 0,6. Формирование указанных модулирующих сигналов производится симметрично относительно центров полупериодов за счет того, что начало каждого первого на тактовом интервале тактового подинтервала и конец каждого последнего подинтервала непрерывно синхронизируются соответственно с началом и концом соответствующего тактового интервала 60-градусной продолжительности.
Величина вышеупомянутого коэффициента К(1 К 0) характеризует в этом случае степень максимального относительного уменьшения продолжительности тактовых подинтервалов, наблюдаемую в средней
точке частотного диапазона
г п О (Гтсл К Го }
частого
Параметр К характеризует при этом также относительное увеличение средней чзс- тоты коммутации вентилей на центральной части диапазона регулирования, которое. как известно, в каждой точке диапазона регулирования обратно пропорционально
10 продолжительности тактовых подинтервалов. Задаваясь, к примеру, величиной коэффициента К 0,6, максимальное значение средней частоты коммутации основных вентилей трехфазного мостового преобразова15 теля будет выше, чем на частотах F0 и NF0,
в -JT -х-х раза. В общем случае величина
коэффициента К, ограничивающая среднюю частоту коммутации вентилей безотноси0 тельно к индексу (величине) диапазона регулирования N, задается в первую очередь исходя из частотных свойств используемых силовых вентилей, а также от требований к спектральному составу выходного напряже5 ния преобразователя внутри того или иного поддиапазона регулирования.
Процесс регулирования частоты выходного сигнала преобразователя базируется в
0 рассматриваемом случае, как показано стрелками на фиг.З, на постоянной поэтэп- , ной вариации длительностей основных и модулирующих сигналов управления, формируемых в центральных точках рассматри5 ваемых тактовых интервалов (в точке 90° применительно к полупериоду проводящего состояния вентилей и в точке 270° на полупериоде закрытого состояния), за счет чего обеспечивается плавное безударное изме0 нение формы выходной кривой. При этом для поддержания постоянства отношения величины выходного напряжения преобразователя к частоте на поддиапазонах регулирования, на которых в центрах тактовых
5 интервалов формируются основные сигналы управления (см. фиг.З,а) продолжительность. Я модулирующих сигналов управления изменяется в функции начального F0 и текущего F значений выходной частоты и количества I
0 формируемых модулирующих сигналов управления на каждой половине тактовых интервалов в соответствии с выражением
11 1 Я ттг (-р - ). На под/диапазонах регули5 рования, на которых в центрах тактовых интервалов формируются модулирующие сигналы изменяемых длительностей Я (фиг 3,6), продол- жительностьЯостальных модулирующих сигналов находится как
1
Б(2Г- T) значение X при этом равно
(1-1) (на
подобных поддиапазонах регулирования в общее количество i модулирующих сигналов управления на половинах тактовых интервалов входит и центральный модулирующий сигнал). Переход от одного из двух опорных алгоритмов управления к другому и наоборот осуществляется при этом на граничных частотах FI и FI . причем FI FI FI+I ,(
Упомянутые граничные частоты FI и FI, переходные от одного поддиапазона регулирования к другому, являются достаточно важным параметром при характеристике рассматриваемого режима формирования управляющих сигналов. Так, при FI форма управляющих сигналов аналогична кривым, построенным на фиг.3,6, а при F F FiVi форма сигналов управления подобна сигналам, приведенным на фиг.З.а. Определение значений FI и FI осуществляется при этом в общем виде из нижеприведенных соотношений:
FT-tx + v+N+Vo,
где х Q
.,,г... ,-,
V-Q/2+ /D, Y- i-Q/2- /D, (N+1)S/3-T-2(N+1)3/27,
#i
Р S - (N-МГ/З, D (P/3)3 + (Q/2)2;f
при этом при определении FI :
o-CN + .(N-1)2
Л4(1- К)8(i -1)(2I -1)(1 т- N(N-1)2 . Т-8(1-1)(1-К} „ а при определении FI :
e.(N+1)2-4KN , (N-1)2
(21-1)0 -К)
4(1 -К)
(N -1)2 1 81(1 -К)
На первом, начиная с частоты F0, поддиапазоне регулирования, алгоритм формирования управляющих сигналов на вентили преобразователя зависит от значения индекса N кратности диапазона регулирования. При этом, поскольку при четном N на начальной частоте г& в центрах тактовых интервалов формируются основные сигналы управяения (аналогично фиг.3,а), алгоритм управления при Fi-N/2 тождествен вышеупомянутым законам управления при FI F FI+I , а в случае нечетного N в диапазоне выходных частот F F ъ
z. F0, алгоритм управления тождествен зако0
нам управления при FI F FI (см. фиг.3,6).
В соответствии с вышесказанным, анализируя вариант управления с N 10 и К 0,6, в диапазоне выходных частот F0Ј F Fs 1,014 FO, на котором I 5 продолжительности А модулирующих сигналов управления
11 1 определяются как Л ™(р - те-)- На
следующем (поддиэпазоне регулирования при F5-F Fs 1,30 Fo, на котором по-прежнему I 5, длительность А отмеченных модулирующих сигналовравна 1 1
5
0
5
5
0
6(2i-1)F0N
- т - i
а продолжительность Я центрального модулирующего сигнала управления находится как 1 о 1
Я -
5
0
5
На частоте
Fs
длиFF 8r 5ZKTF;-тельность центрального модулирующего сигнала уменьшается до близкого к нулю значения. Соответственно уменьшается после этой частоты на единицу значение индекса I, которое становится равным четырем (I 4). Упомянутые алгоритмы формирования сигналов управления при этом последовательно повторяются друг за другом вплоть до номинальной выходной частоты NF0. Рассчитанные по вышеприведенным зависимостям для данного режима значения остальных граничных частот F/ и FI при этом соответственно равны: F4 1,36 F0; F-i: -1,89 F0; F3 2.09 F0; Рз 3,39 F0; FЈ - 4,73 F0; f2 6,39 F0; F NF0 10 Fo.
Улучшение гармонического состава выходного напряжения преобразователя может быть достигнуто за счет формирования на крайних участках полупериодов управления, в зонах 0-30, 150-180,180-210иЗЗО-360 эл.град., дополнительных модулирующих сигналов управления, позволяющих обеспечить устранение из спектра определенных паразитных гармоник. При этом местоположения ближних к границам полупериодов фронтов дополнительных модулирующих сигналов управления определяют путем сдвига на + 60 эл.град. ближних к перединам полупериодов фронтов соответствующих главных модулирующих сигналов управления с продолжительностью А. Длительность упомянутых дополнительных сигналов управления определяется при этом в соответствии с известной зависимостью которой k - номер исключаемой из спектра выходного напряжения паразитной гармо- , ники; для частотных поддиапазонов ,Fi +i , а также при NF F Fh-2 :
,ni SlnkHj-A)sifvbr;
4 sin
kr k(lr+A) -TJ- cos
sin
ktt
С 4 sin
i kr
. kA sin -y- cos
kTr
2
. гл: I r, . k n . k r x cos k -Q - -у - sin -g- sin -у ;
а для частотных поддиапазонов Fi
Fi A 4 sin
krQ-1) eln k(r-l r-A) . k
sin
sin
3 kjr
В 4 sin
krd-1)... kfr-l r-A)
cos
С 4 sin
Ikr
2 . ,я Ir,
л COS К тг
sin cos
iD
, ktfr . kr .
- Sln-g- Sin-- +
. „ , ... rtt 21 - 1 т A, .„kr 4- 2 cos -g- slnlk Јjjp T
Для того, чтобы отмеченную k-ю паразитную гармонику можно было устранить из 20 спектра на всем диапазоне регулирования, в том числе в зоне повышенных выходных частот, целесообразно в упомянутой зоне, начиная с частоты F и до номинальной выходной частоты преобразователя NF0, 25 как показано пунктиром на фиг.2, длительность г тактовых подинтервалов принимать
равной г ггр Требуемое значение F1
при этом выбирается в соответствии с но- 30 мограммой, построенной на фиг.5, для конкретных значений коэффициента К и индекса диапазона регулирования N. При этом, как показано пунктиром на фиг,5 для режима управления с К 0,6 и N 10, опре- 35 деление F начинается от оси ординат нахождением соответствующего К. определением его точки пересечения с кривой для соответствующего N и последующей проекцией указанной точки на ось абсцисс, по которой 40
отложены относительные значения
I Г1
- N FO
Величина F1 определяется при этом соответствующим пересчетом полученного на оси абсцисс значения и, в частности, для
рассматриваемого случая с N 10: F O,743NFo 7,43F0.
Описанное формирование дополнительных модулирующих управляющих сигналов приводит, как показано на фиг.З пунктиром, к видоизменению формы выходного напряжения преобразователя, тождественному тому, при котором результирующая выходнай кривая получается в результате суммирования основной последовательности выходных импульсов с дополнительной последовательностью, гармоники которой находятся в противофазе с соответствующими паразитными гармоникчми основной после45
50
55
10
15
2025
30 35 40
45
50
довэтельности импульсоп и вызывают тем самым их исключение или уменьшение (ком пенсируют амплитуды паразитных гармоник).
На фиг.2 построена рассчитанная по приведенным соотношениям кривая изменения относительной, выраженной в эл.град., продолжительности удополни- тельных сигналов управления для рассматриваемого режима управления с N 10 и К 0,6 применительно к варианту устранения из спектра пятой гармонической составляющей (k 5). Следует отметить, что наряду с полным устранением из спектра пятой гармоники значительно уменьшается при этом и амплитуда седьмой гармонической составляющей.
Достаточно сложные нелинейные зависимости, характеризующие режим проведения приемов описанного способа управления, целесообразно осуществлять при помощи современных цифровых (микропроцессорных) средств управления. На фиг.4 изображена обобщенная функциональная схема подобной системы управления преобразователем, выполненной по вертикальному принципу, базовые блоки которой строятся на цифровой основе. На выходе блока задания частоты 1 формируется сигнал Ui. прямо пропорциональный значению выходной частоты преобразователя, который поступает на входы тактового генератора 2 и функционального N-канального по выходу преобразователя 3. Частота следования импульсов генератора 2 определяет частоту выходного сигнала блока развертки 4, которая на всем диапазоне регулирования в 6 раз выше выходной частоты преобразователя. Сигнал блока 4 постоянно сопоставляется в блоке формирования управляющих импульсов 5 с выходными сигналами 1)з функционального преобразователя 3, величина которых пропорциональна текущим значениям положений фронтов выходных импульсов «1 - огм внутри тактовых интервалов (см. временные диаграммы UAB на фиг.З). Указанные значения а предварительно определяются расчетным путем из соотношений, характеризующих режим осу- ществления описанного способа,
В моменты равенства текущих значений сигналов блоков 3 и 4 блоком 5 пырзбатыва- ются команды на формирование фронтов управляющих (и выходных) импульсов, которые распределяю гея по соответствующим вентилям в соответствии с принятым опорным законом 180 градусного управления
ри помощи логического распределителя правляющих импульсов 6, связанного по ыходу с трехразрядным регистром 7.
Таким образом, описанный режим формирования управляющих сигналов на венти- 5 и трехфазного мостового преобразователя позволяет наиболее простым параметрическим путем, за счет модернизации параметров режима управления, обеспечить ограничение средней частоты коммутации 10 основных вентилей преобразователя на требуемом (задаваемом) уровне. Тем самым достигается номинальная, с учетом конкретных частотных свойств, загрузка вентилей и обеспечивается надежность функциониро- 15 вания преобразователей для электропривода с плавным изменением формы выходного напряжения в процессе связанного щиро- кодиапазонного регулирования частоты и величины выходного сигнала.. 20
Формула изобретения 1. Способ нелинейного управления трехфазным вентильным преобразователем с N-кратным, начиная с частоты F0, диапазоном связанного регулирования частоты и 25 величины выходного напряжения с постоянством отношения напряжения к частоте, при котором основные вентили разных фаз и групп преобразователя периодически включают и выключают с взаимным фазо- 30 вым сдвигом в 60 эл.град. % последовательности +А, -С, +В, -А, +С, -В, при этом для каждого вентиля в течение одного полупериода 0-180 эл.град. формируют интервал проводимости вентиля, в течение другого 35 полупериода 180-360 эл.град. формируют интервал закрытого состояния вентиля, на центральных внутри полупериодов такто- ,вых интервалах 60-120 и 240-300 эл.град. симметрично относительно середин пол- 40 упериодов формируют модулирующие сигналы управления, разноименные с соответствующим полупериодом управления, число которых последовательно умень- шают с ростом выходной частоты 45 преобразователя F, причем, генерирование указанных модулирующих сигналов производят в серединах тактовых подйнтервалов с продолжительностью т. внутри каждого тактового интервала начало первого из под- 50 интервалов и конец последнего из них синхронизируют, соответственно с началом и концом тактового интервала, формирование каждого i-ro от начала (и от конца) до середины тактового интервала модулирую- 55 щего сигнала управления осуществляют при изменении выходной частоты преобразователя or FO до грани той частоты FI , при этом в номинальном режиме работы на поддиапазонах выходных частот, при которых ,F7
FH-I (Fi FI FH-I) продолжительность Я всех модулирующих сигналов управления определяют как
, 1 Л 1 ч
TVNJ
а на частотных поддиапазонах, на которых Fi F Fi , наряду с основным массивом модулирующих сигналов управления с продолжительностью А в серединах тактовых интервалов формируют центральный модулирующий сигнал с длительностью А от л и- чающийся тем, что, с целью ограничения средней частоты коммутации вентилей преобразователя, на уровне F0/K (К41) на всем диапазоне регулирования длительность г тактовых подйнтервалов изменяют в соответствии с зависимостью
г (1 - К) (N + 1 - 2 F/Fo)2 + К (N - 1)2
6 Fo N(N - 1)
значения граничных частот FI и FI , переходных от одного поддиапазона регулирования к другому, определяют как
П (1 (У . V 4- N +1,,
FI (X + Y + ) FO.
где X Y-Q/2 + YD : Y V-Q/2 - VD Q (N+1) S/3 - Т - 2(N+1)3/27; P S-(N+1)2/3; D(P/3)3 + (Q/2)2.
при этом,при определении F
(N-M)2-4KN (N-1)2
С -
4(
+
T N(N
jЈ
8(1 -1)(2i -1)(1 8( -1)(1 -K)
а при определении FI :
с (N + lf-4KN(N-1)2
4 (1 - K) + 8l(2i -IJCT1
N(N-lf 81 (1 - K) при этом, при FI
A r-6FoN(2l-l):ALl/6F-1/6F:
2.Способ по п. 1; отличающийся тем, что в диапазоне выходных частот преобразователя F - NF0 продолжительность т тактовых подйнтервалов принимают равной т 1 /12 F, при этом значение граничной частоты F для конкретных N и К выбирают в соответствии с номограммой, представленной на фиг.5.
3.Способ по п.2, отличающийся тем,-что, с целью улучшения спектрального состава выходного напряжения преобразователя на всем диапазоне регулирования, формируют внутри интервалов 0-30, 150180, 180-210, 330-360 эл.град. дополнительные модулирующие сигналы управления, при этом местоположения ближних к границам полупериодов фронтов дополнительных модулирующих сигналов управления определяют путем сдвига на ± 60 эл.град. ближних к серединам полупериодов фронтов соответствующих главных модулирующих сигналов управления с продолжительностью А, при этом длительность у дополнительных модулирующих сигналов управления определяют в соответствии с соотношением
а также при :
. . . I k г . k(-i т - Я) А 4 sin -у- sin L--А1
D ..Ikr k (I r + А) . k л- В 4 sin -2 cos -A--A--L sin . , -| k r . k A kji С 4 sin sin -к- cos /.«со
. ,JT I r, . k я . k г xcoskt-g- --H - sin-T-sin ;
0
0 а для частотных поддиапазонов FI F FI :
A 4 sin sin s,n
P л .t. kr(l-1) Иг-1 r-X) ,-k В 4 sin cos -дя sin -
Использование: нелинейное управление трехфазным вентильным преобразователем. Способ управления заключается в периодическом включении и выключении со взаимным фазовым сдвигом в 60 эл.град. основных вентилей трехфазного мостового преобразователя, при этом зоны проводимости и закрытого состояния вентилей со- ставляют по 180 эл.град. Связанное регулирование частоты и величины выходного напряжения по закону постоянства отношения величины напряжения к частоте осуществляется при этом за счет постоянной плавной вариации длительностей основных и модулирующих сигналов управления, формируемых в серединах упомянутых зон управления. Новым в способе является непрерывное нелинейное изменение продолжительности тактовых подинтер- валов, в центрах которых формируются модулирующие сигналы управления, по параболической зависимости с фокусом указанной зависимости в средней точке частотного диапазона, сопровождаемое сопутствующим видоизменением функциональных зависимостей, характеризующих параметры синтезируемых сигналов управления, 2 з.п. ф-лы, 5 ил. (Л С
9
у -| arctg
, A - (В + С) С 2 (В + q где К - номер исключаемой из спектра выходного напряжения паразитной гармоники, для частотных поддиапазонов Fi F FI+I ,
4-,
.T/
№/&f
t/rr
5
Сл . I К Т , Л. /VIV /t
4 sin -я- sin cos -к- л
2
k JT 6
x cos k | - -y - sln sin™ -f 20 +2cos slnk f-i2i Jll-|;s nY.
Ъфо&
7 F 8 S 10
Я7 UM
I Г ГГ 455 УЭД7°
и п п п EI га п Гп
of, of2c(j cfoc
.. Г 1
г Т
1 П П Г Т ПТ
«; о(2 c(2i;.z oЈ2..;
0.2
| Способ управления трехфазным регулируемым мостовым инвертором | 1987 |
|
SU1492434A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления регулируемым мостовым инвертором | 1988 |
|
SU1577027A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления трехфазным вентильным преобразователем | 1988 |
|
SU1686663A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
