Изобретение относится к области силовой электроники и может быть использовано при разработке преобразователей на базе трехфазных автономных инверторов напряжения, предназначенных для питания систем асинхронного частотно-регулируемого электропривода.
Известны способы управления трехфазными преобразователями для электропривода, базирующиеся на поэтапном изменении количества импульсов в полуволне выходного напряжения, причем указанное изменение числа импульсов
происходит дискретно, что приводит к нежелательным броскам тока в силовых цепях преобразователя в моменты дискретного переключения. Известен также способ гибкого нелинейного управления широкорегулируемыми преобразователями 3, при котором благодаря специальной нелинейной модуляции продолжительностей основных и модулирующих сигналов управления, формируемых в тактовых точках, обеспечивается плавный безударный переход от одной формы выходного сигнала к другой. Средняя частота коммутации вентилей преXJ XI ел
00
ю XI
образователя при этом постоянна, на всем диапазоне регулирования обеспечивается постоянство отношения величины напряжения к частоте. Продолжительность тактовых подинтервалов, в серединах которых формируются модулирующие сигналы управления, при этом на всем диапазоне регулирования постоянна, на нижних частотах в этом случае протяженность интервалов между импульсами упраоления (и выходными импульсами) весьма велика, чго, как известно, негативно сказывается на динамических свойствах преобразователя в зоне пониженных выходных частот, крайне чувствительного на этом поддиапазоне к воздействию возмущающих факторов. Известно также, что для повышения надежности осуществления режима пуска преобразователя, нагруженного на асинхронный двигатель, закон управления в кратковременном пусковом режиме должен отличаться от базового закона управления с U/F const.
Целью изобретения является улучшение динамических свойств и гармонического состава выходного напрях ения трехфазного преобразователя в пусковом режиме и в диапазоне пониженных и средних выходных частот, достигаемое за счет изменения на начальной частоте Fo в К раз продолжительности тактовых подинтервалов и соответствующего этому увеличения количества импульсов в полуволне выходной кривой, а также повышение надежности осуществления процесса пуска преобразователя, нагруженного на асинхронный двигатель.
Поставленная цель достигается тем, что при управлении по указанному способу, обеспечивающему N-кратное, начиная с частоты Fo, связанное регулирование выходных частоты и напряжения преобразователя, заключающемся в том, что основные вентили разных фаз и групп преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл. град, в последовательности +А, -С, +В, -А, +С, -В, при этом для каждого вентиля в течение одного полупериода от 0 до 180 эл. град, формируют интервал проводимости вентиля, в течение другого полупериода от 180 до 360 эл. град, формируют интервал закрытого состояния вентиля, на центральных внутри полупергюдов тактовых интервалах от 60 до 120 и от 240 до 300 эл. град, симметрично относительно середин полупериодов формируют модулирующие сигналы управления, разноименные с соответствующим полупериодом управления, число которых последовательно уменьшается с ростом выходной частоты преобразователя F, причем генерирование указанных модулирующих сигналов производят в серединах тактовых подинтервалов с продолжительностью т, внутри каждого тактового интервала начало первого из подинтервалов и конец последнего из них синхронизируют соответственно с началом и концом тактового интервала, формирова0 ние каждого 1-го от начала (и от конца) до середины тактового интервала модулирующего сигнала управления осуществляют при изменении выходной частоты преобразователя от FO до граничной частоты FI , при
5 этом в номинальном режиме работы на поддиапазонах выходных частот, при которых FI F FH-I (Fi1 Fi Fi+i). продолжительность Я всех модулирующих сигналов управленияопределяюткак
011 1
Я --чтт (тг с м) а на частотных поддиа0
5
..I
Л
пазонах, на которых Fi1 , F FI, наряду с основным массивом модулирующих сигналов управления с продолжительностью Я, в 5 серединах тактовых интервалов формируют центральный модулирующий сигнал с длительностью Я, на всем диапазоне регулирования длительность ттактовых подинтервалов изменяют в соответствии с зависимостью (F-F0)() + KF0(N-1)
6F§(N-1)N
этом в пусковом режиме, в диапазоне выходных частот преобразователя F0 - 2F0, значения вышеупомянутых граничных частот, переходных от одного поддиапазона управления к другому, определяют соответственно как
0
г при
, ei(g;.il«-Kiti.J4;tU :4MKH-4tts;(2riHi-KKi -n M(2.
F (г - Н -М
, ufriK2i-H(t-kHb(i-at(gi-i)tmn «8f -4((-KVt«(g i-fl-t3
104(rll(Јi-l|«-k).
45
N-2
в этом режиме при FI F FI+I Я лп- г iu;
при
Fi1 F Fi : Я г-тТ7П
1
3 (2i - V) FN A (gi(l)1N)pN2-2(i-1)T. авноминальном режиме работы преобразователя, при NF0 F 2F0, значения граничных частот FI и FI находят соответственно как
, rti(g-i-ii -KHl H-i 4Ui((KK-(i-K if«u .(g --t)10-KKn-4H
иенк«-Ц
i at.Q№-0(t-«Hl-)m.4p(rii(((-iU2:-0 .(i-fc|(H-ilH 1 4(i-tKZ -- H -K)
при этом при FI F Fj A т - -рг1
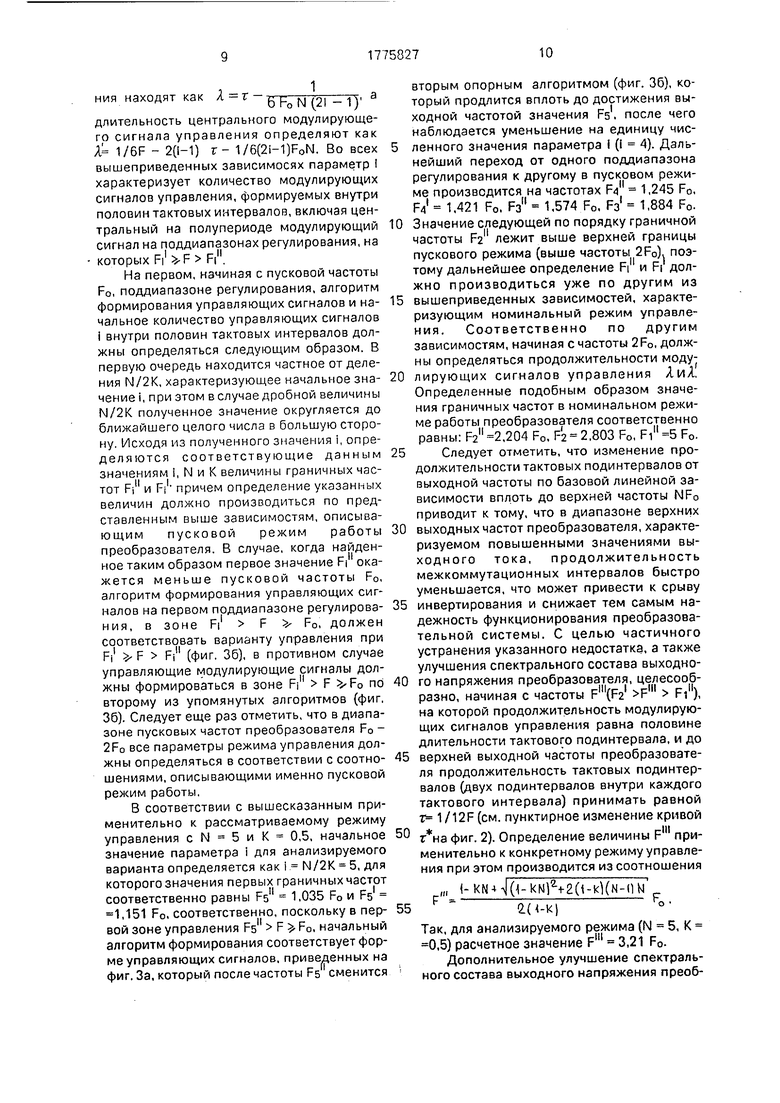
(2i -1) Я 1 /6F - 2(1-1) Г- 1 /6(2I-1)F0N.
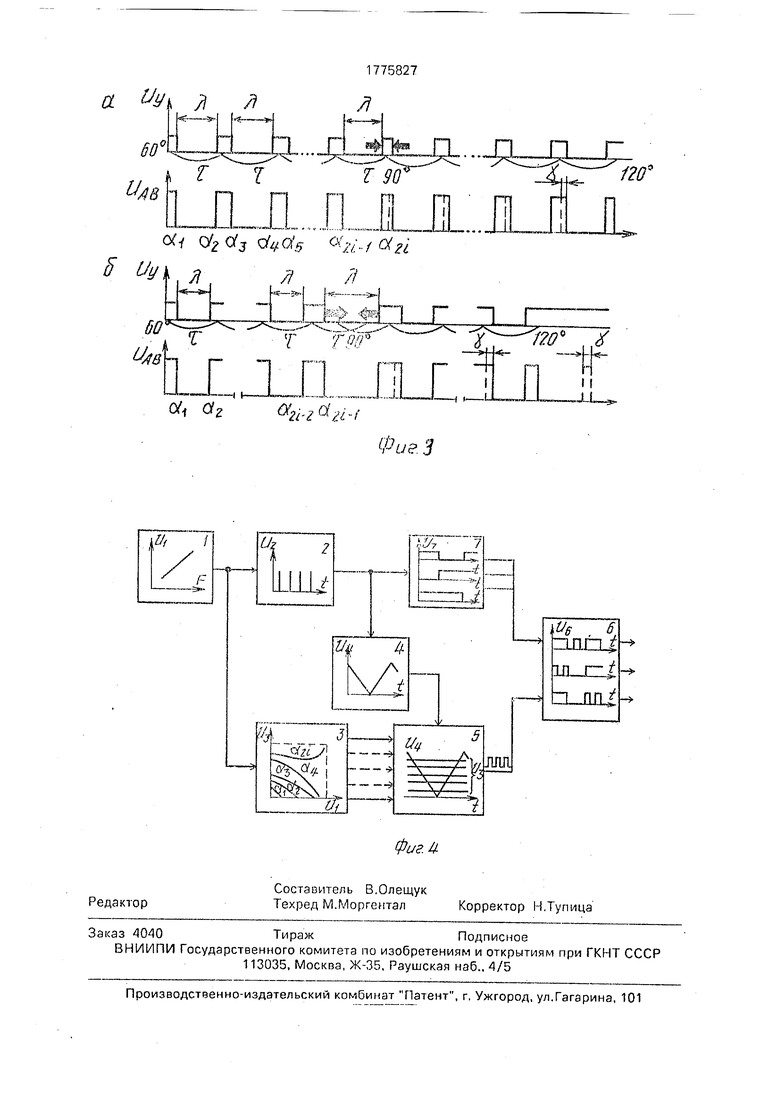
На фиг. 1 приведена схема основных соединений силовых цепей тиристорного преобразователя напряжения, выполненного на базе полностью управляемых тиристоров, нагруженного -на асинхронный электродвигатель; на фиг. 2 - регулировочная характеристика преобразователя и кривая изменения относительной продолжительности тактовых подинтерва- лов; на фиг. 3 - временные диаграммы, иллюстрирующие два опорных варианта формирования управляющих сигналов на вентили инвертора; на фиг. 4 изображена блок-схема системы управления преобразователем.
Временные диаграммы, построенные на фиг. 3, иллюстрируют два базовых алгоритма формирования управляющих сигналов на вентили преобразователя в процессе регулирования, а также соответствующие им кривые линейного выходного напряжения UAB. Приведенные здесь управляющие сигналы UY поступают на находящийся в положительном проводящем полупериоде управления вентиль +А катодной группы трехфазной мостовой схемы преобразователя, при этом положительная величина UY (основной сигнал управления) соответствует проводящему состоянию вентиля, а нулевое значение UY (модулирующий сигнал управления) - закрытому состоянию (следует помнить, что вентили являются полностью управляемыми). Формирование разноименных с соответствующим полупериодом управления модулирующих сигналов управления с продолжительностью А, определяющей величину выходного напряжения преобразователя, на всем диапазоне регулирования F0 - NF0 осуществляется при этом внутри средних на полупериодах тактовых интервалах (60-120 и 240-300 эл. град) в центрах тактовых подинтервалов, показанных на фиг. 3 тонкими дугами снизу, имеющих переменную продолжительность т, зависящую от текущих значений выходной частоты F и определяемую как .(F-Fo)(1-K) + KF0(N-n
2
(см. по6FS(N -1)N строенную на фиг. 2 кривую зависимости изменения относительной продолжительности т t/rm от частоты F применительно к величине диапазона регулирования N 5 и значению коэффициента К 0,5). Формирование указанных модулирующих сигналов
производится симметрично относительно центров полупериодов благодаря тому, что начало каждого первого на тактовом интервале тактового подинтервала и конец каждого последнего подинтервала непрерывно синхронизируются соответственно с началом и концом собственного тактового интервала 60-градусной продолжительности. Продолжительность тактовых подинтерва0 лов при рассматриваемых законах управления изменяется (увеличивается) прямо пропорционально с ростом выходной частоты трехфазного преобразователя, нагруженного на асинхронный двигатель.
5 Величина предварительно задаваемого упомянутого выше в выражении для определения продолжительности тактовых подинтервалов коэффициента К, принимающего значения от нуля до единицы, является весь0 ма важным параметром рассматриваемого режима управления и характеризует собой степень изменения продолжительности тактовых подинтервалов на начальной выходной частоте преобразователя F0 по
5 сравнению с максимальной продолжительностью подинтервалов, наблюдаемой в верхней точке частотного диапазона, на частоте NF0, на которой полуволна выходного напряжения формируется из одного импульса.
0 При этом чем меньше абсолютные значение коэффициента К, тем короче на начальной выходной частоте продолжительность тактовых подинтервалов и тем больше количество модулирующих сигналов внутри
5 тактовых интервалов, тем из большего числа импульсов формируется на начальной выходной частоте полуволна выходного напря- жения преобразователя. Упомянутое начальное число модулирующих сигналов
0 внутри тактовых интервалов при этом определяется из выражения N/K, т.е., например, при N 5 и К 0,5 на начальной частоте внутри тактовых интервалов будет формироваться по десяти модулирующих сигналов
5 управления. В случае, когда указанное частное от деления является дробной величиной, начальное количество модулирующих сигналов управления находится округлением в большую сторону. Конкретное значе0 ние параметра К должно задаваться, исходя в первую очередь из требований к динамическим свойствам преобразовательной системы и к гармоническому составу ее выходного напряжения в области низких и
5 средних выходных частот, руководствуясь тем правилом, что большее число импульсов в выходной полуволне на начальной частоте (меньшее К) способствует улучшению гармонического состава выходного напряжения и динамических свойств системы.
Процесс регулирования частоты выходного сигнала преобразователя как в пусковом так и в номинальном режимах работы базируется в рассматриваемом случае, как показано стрелками на фиг. 3, на постоянной поэтапной вариации длительностей основных и модулирующих сигналов управления, формируемых в тактовых точках, соответствующих центрам упомянутых тактовых интервалов (в точке 90° применительно к полупериоду проводящего состояния вентилей и в точке 270° на полупериоде закрытого состояния ключей). Отмеченный принцип формирования управляющих сигналов, существенной особенностью которого является непрерывное отождествление (кодирование) продолжительностей формируемых в центрах тактовых интервалов основных и модулирующих управляющих сигналов с длительностью основного массива сигналов, за счет чего осуществляется плавный безударный переход от одного поддиапазона управления к другому, может быть поэтому определен как широтно-кодо- вый.
Внутри поддиапазонов регулирования, на которых, как показано на фиг. За, в центрах тактовых интервалов формируются ос- новныесигналы управления, регулирование величины выходного напряжения осуществляется путем изменения продолжительно- стей Я модулирующих сигналов по определенным зависимостям. На поддиапазонах, на которых, как показано на фиг, 36, в серединах подинтервалов формируются модулирующие сигналы управления с варьируемой длительностью Я продолжительность Я остальных модулирующих сигналов находится в соответствии с другими функциональными зависимостями. Граничные значения частот FI и FI, переходных от одного поддиапазона регулирования к другому, определяются при этом через соответствующие параметры режима управления.
Следует отметить, что величина коэффициента К в принципе может быть и больше единицы, в этом случае, как показано пунктиром на фиг. 2 для варианта К 1,25, на начальной частоте Fo наблюдается уменьшенное (N/K 5/1,25 4) количество тактовых подинтервалов с соответственно увеличенными в К раз продолжительностя- ми. При этом все приведенные в тексте описания зависимости, характеризующие режимы формирования управляющих сигналов, остаются в силе.
Известно, что одним из наиболее экономичных и часто применяемых в номинальных режимах работы законов управления
преобразователями для систем частотно- регулируемого асинхронного электропривода является управление по закону постоянства отношения величины напряжения к частоте, при котором, как показано на фиг. 2 для частотного диапазона номинального регулирования 2F0 т NF0 -5F0, величина напряжения растет прямо пропорционально с увеличением выходной
частоты преобразователя. Известно также, что в кратковременном пусковом режиме преобразователя, нагруженного на асинхронный электродвигатель, относительная величина напряжения должна быть существенно повышена по сравнению с номинальным режимом, в этом случае в диапазоне пусковых частот целесообразно поддерживать величину напряжения повышенной и постоянной, а в качестве верхней границы
диапазона пусковых частот принимать частоту, равную удвоенной начальной частоте FO (см. диапазон F0 2F0 на фиг. 2).
Таким образом, в пусковом режиме работы преобразователя, в диапазоне частот
FO r 2F0, вышеупомянутые значения граничных частот и параметров управляющих сигналов, через которые реализуется требуемый закон управления, должны быть определены как:
30
Ff-f.
K(2,-d(i-KH)t.j4.«ty-o 0(ii-ii K(2i-ii(i- HK- lDU2, |(г;-П(1-к
F-F.
ги(г,-1|(1- иЬ4и;-11г№-И (1-кн| бц-ч(г;-11(((е;-о-г
4(.-0(2И(-Ч
в этом режиме при FI F FH-I Я тпгстп. при R1 F FI ; (2l -1)FN
Я f (27- 1) FN2 - 2 G -1) 7 -В номинальном режиме работы преобразователя, при NFo F 2F0, значения граничных частот FI и FI находят соответственно как
и
, gl(g-.-n(-kMltH- 4j g;(2.-i|(kn-o-N i3NS-.(a;-01(i-xl(K-flH Fi F.«(e;-W«-4
.1 r гс.-Ч(г;-((;-ч(г;-11(|-кн1-ниЗ%8(;-01г:-1(1-к1(я-11м ,
F.-F,
«сикг;-4(1-к
50
на поддиапазонах выходных частот, при которых FI Р FI-H , продолжительность Я всех модулирующих сигналов управления
11 1 определяют как Я -ттт (т: р м) а на
частотных поддиапазонах, на которых FI Ј F FI, продолжительность Я всех, за исключением центрального на тактовом интервале, модулирующих сигналов управле1
иия находят как Я т - г- г м (0| - 1V а
длительность центрального модулирующего сигнала управления определяют как Я 1/6F - 2(1-1) т- 1/6(2i-1)F0N. Во всех вышеприведенных зависимосях параметр I характеризует количество модулирующих сигналов управления, формируемых внутри половин тактовых интервалов, включая центральный на полупериоде модулирующий сигнал на поддиапазонах регулирования, на которых FI -F FI .
На первом, начиная с пусковой частоты FO, поддиапазоне регулирования, алгоритм формирования управляющих сигналов и начальное количество управляющих сигналов i внутри половин тактовых интервалов должны определяться следующим образом. В первую очередь находится частное от деления N/2K, характеризующее начальное значение i, при этом в случае дробной величины N/2K полученное значение округляется до ближайшего целого числа в большую сторону. Исходя из полученного значения i, определяются соответствующие данным значениям i, N и К величины граничных частот FJ и Fi1 причем определение указанных величин должно производиться по представленным выше зависимостям, описывающим пусковой режим работы преобразователя. В случае, когда найденное таким образом первое значение FJ окажется меньше пусковой частоты F0, алгоритм формирования управляющих сигналов на первом поддиапазоне регулирова- ния, в зоне FI F / F0, должен соответствовать варианту управления при Fj1 F FI (фиг. 36), в противном случае управляющие модулирующие сигналы должны формироваться в зоне Fi F -F0 по второму из упомянутых алгоритмов (фиг, 36). Следует еще раз отметить, что в диапазоне пусковых частот преобразователя F0 - 2F0 все параметры режима управления должны определяться в соответствии с соотношениями, описывающими именно пусковой режим работы.
В соответствии с вышесказанным применительно к рассматриваемому режиму управления с N 5 и К 0,5, начальное значение параметра i для анализируемого варианта определяется как i N/2K 5, для которого значения первых граничных частот соответственно равны FS 1,035 F0 и FS 1,151 FO, соответственно, поскольку в первой зоне управления Fs F F0, начальный алгоритм формирования соответствует форме управляющих сигналов, приведенных на фиг. За, который после частоты FS сменится
вторым опорным алгоритмом (фиг. 36), который продлится вплоть до достижения выходной частотой значения Fs. после чего наблюдается уменьшение на единицу чис- ленного значения параметра i (i 4). Дальнейший переход от одного поддиапазона регулирования к другому в пусковом режиме производится на частотах FA 1,245 F0,
F4 1.421 Fo. F3 1,574 F0. F3 1,884 F0.
0 Значение следующей по порядку граничной частоты Fa лежит выше верхней границы пускового режима (выше частоты 2F0), поэтому дальнейшее определение FI и FI должно производиться уже по другим из
5 вышеприведенных зависимостей, характеризующим номинальный режим управления. Соответственно по другим зависимостям, начиная с частоты 2F0, должны определяться продолжительности моду0 лирующих сигналов управления ЯиА. Определенные подобным образом значения граничных частот в номинальном режиме работы преобразователя соответственно равны: F2 2,204 F0. F2 2,803 F0, Fi 5 F0.
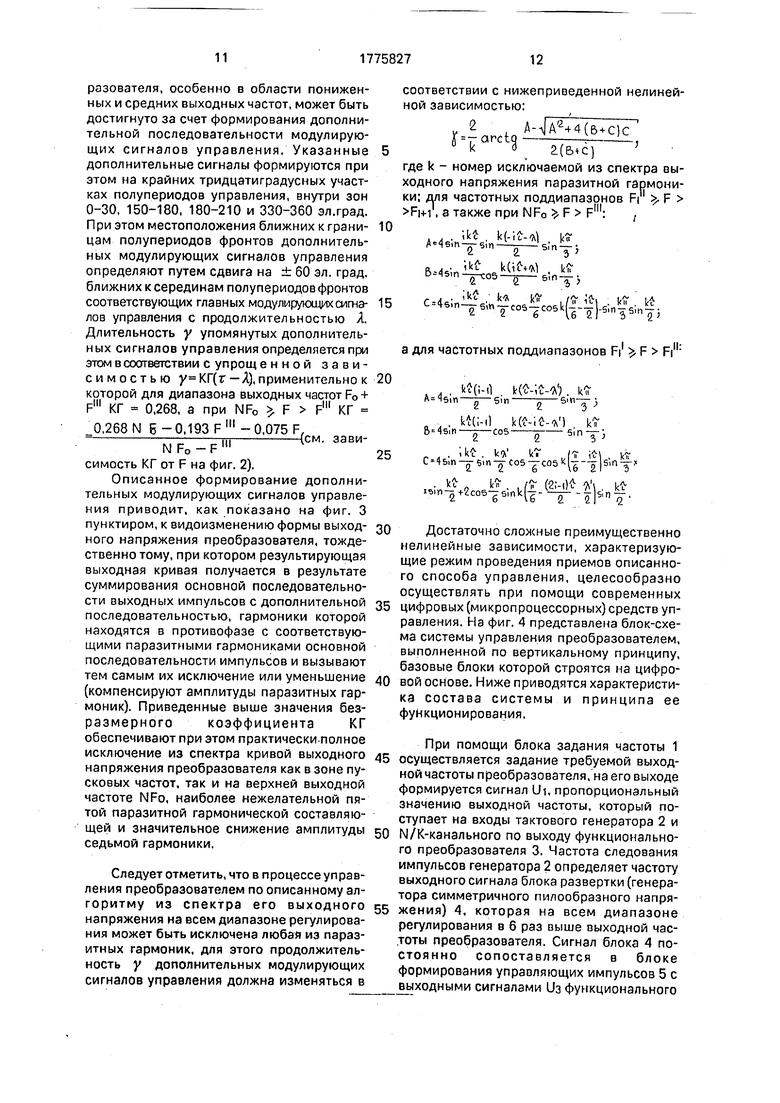
5Следует отметить, что изменение продолжительности тактовых подинтервалов от выходной частоты по базовой линейной зависимости вплоть до верхней частоты NF0 приводит к тому, что в диапазоне верхних
0 выходных частот преобразователя, характеризуемом повышенными значениями выходного тока, продолжительность межкоммутационных интервалов быстро уменьшается, что может привести к срыву
5 инвертирования и снижает тем самым надежность функционирования преобразовательной системы. С целью частичного устранения указанного недостатка, а также улучшения спектрального состава выходно0 го напряжения преобразователя, целесообразно, начиная с частоты F1 (F2 F Fi ), на которой продолжительность модулирующих сигналов управления равна половине длительности тактового подинтервала, и до
5 верхней выходной частоты преобразователя продолжительность тактовых подинтервалов (двух подинтервалов внутри каждого тактового интервала) принимать равной т 1 /12F (см. пунктирное изменение кривой
фиг. 2). Определение величины F1 применительно к конкретному режиму управления при этом производится из соотношения
t-KN-HQ-kNi eO-KUN-tur с
5 FЈ(-К)°
Так, для анализируемого режима (N 5, К 0,5) расчетное значение F1 3,21 F0.
Дополнительное улучшение спектрального состава выходного напряжения преобразователя, особенно в области пониженных и средних выходных частот, может быть достигнуто за счет формирования дополнительной последовательности модулирующих сигналов управления. Указанные дополнительные сигналы формируются при этом на крайних тридцатиградусных участках полупериодов управления, внутри зон 0-30, 150-180, 180-210 и 330-360 эл.град. При этом местоположения ближних к границам полупериодов фронтов дополнительных модулирующих сигналов управления определяют путем сдвига на ± 60 эл. град, ближних к серединам полупериодов фронтов соответствующих главных модулирующих сигналов управления с продолжительностью Я. Длительность у упомянутых дополнительных сигналов управления определяется при этом в соответствии супрощенной зависимостью (г -А), применительно к которой для диапазона выходных частот F0 + F1 КГ 0,268, а при NF0 , F F1 КГ
0,268 N Б - 0,193 F - 0,075 F, ---т(см. завиN Fo - F симость КГ от F на фиг. 2).
Описанное формирование дополнительных модулирующих сигналов управления приводит, как показано на фиг. 3 пунктиром, к видоизменению формы выходного напряжения преобразователя, тождественно тому, при котором результирующая выходная кривая получается в результате суммирования основной последовательности выходных импульсов с дополнительной последовательностью, гармоники которой находятся в противофазе с соответствующими паразитными гармониками основной последовательности импульсов и вызывают тем самым их исключение или уменьшение (компенсируют амплитуды паразитных гармоник). Приведенные выше значения безразмерного коэффициента КГ обеспечивают при этом практически полное исключение из спектра кривой выходного напряжения преобразователя как в зоне пусковых частот, так и на верхней выходной частоте NFo, наиболее нежелательной пятой паразитной гармонической составляющей и значительное снижение амплитуды седьмой гармоники,
Следует отметить, что в процессе управления преобразователем по описанному алгоритму из спектра его выходного напряжения на всем диапазоне регулирования может быть исключена любая из паразитных гармоник, для этого продолжительность у дополнительных модулирующих сигналов управления должна изменяться в
соответствии с нижеприведенной нелинейной зависимостью:
2Д-л А 7Т(6+с)с
где k - номер исключаемой из спектра выходного напряжения паразитной гармоники; для частотных поддиапазонов FI / F Fi-n , а также при NF0 F FNI: ,
, А , ;Ь4 , k(-ifr- A k ,n-s..
«„,- ikЈ ItCifrflQ , kfr B- n- oe-g-6 nT}
1Пr-(U-Jk U № i/ttttl . kfr k
15 e-46,n-6lnTC05 co5k(--.s,.
а для частотных поддиапазонов FI F
. , irt(i-rt KЈ-;t- . kfr
AHsm-g- Sing-6 П-
. W(l-i) KMC-ft l . kl
&-4sln
-C05 5in
3 ;
„ . . Ikt . kg/ k /т it . kir C 45in-r-5in-2-co5-7-co5l -g-|s n- И)
Q.
. kfr №.. (2:-l) . k sin-2+2co5-gSmk -g- --ls,n
Достаточно сложные преимущественно нелинейные зависимости, характеризующие режим проведения приемов описанного способа управления, целесообразно осуществлять при помощи современных
цифровых (микропроцессорных) средств управления. На фиг. 4 представлена блок-схема системы управления преобразователем, выполненной по вертикальному принципу, базовые блоки которой строятся на цифровой основе. Ниже приводятся характеристика состава системы и принципа ее функционирования,
При помощи блока задания частоты 1
осуществляется задание требуемой выходной частоты преобразователя, на его выходе формируется сигнал Ui, пропорциональный значению выходной частоты, который поступает на входы тактового генератора 2 и
N/K-кэнального по выходу функционального преобразователя 3. Частота следования импульсов генератора 2 определяет частоту выходного сигнала блока развертки (генератора симметричного пилообразного напряжения) 4, которая на всем диапазоне регулирования в 6 раз выше выходной частоты преобразователя. Сигнал блока 4 постоянно сопоставляется в блоке формирования управляющих импульсов 5 с
ыходными сигналами 11з Функционального
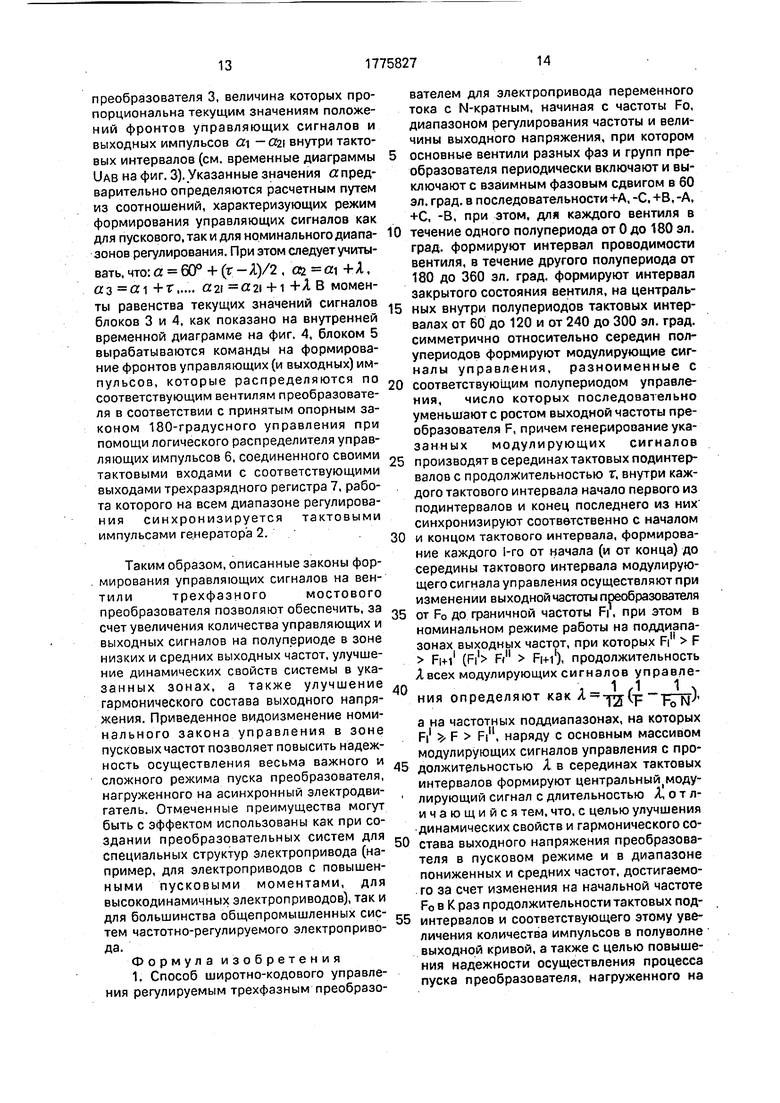
преобразователя 3, величина которых пропорциональна текущим значениям положений фронтов управляющих сигналов и выходных импульсов а -аг внутри тактовых интервалов (см. временные диаграммы UAB на фиг. 3). Указанные значения «предварительно определяются расчетным путем из соотношений, характеризующих режим формирования управляющих сигналов как для пускового, так и для номинального диапазонов регулирования. При этом следует учитывать, что:а 60° + (т-Х)/2 , % а + А, «з «1 +7 22i «2i +1 +Я В моменты равенства текущих значений сигналов блоков 3 и 4, как показано на внутренней временной диаграмме на фиг. 4, блоком 5 вырабатываются команды на формирование фронтов управляющих (и выходных) им- пульсов, которые распределяются по соответствующим вентилям преобразователя в соответствии с принятым опорным законом 180-градусного управления при помощи логического распределителя управляющих импульсов 6, соединенного своими тактовыми входами с соответствующими выходами трехразрядного регистра 7, работа которого на всем диапазоне регулирова- ния синхронизируется тактовыми импульсами генератора 2.
Таким образом, описанные законы формирования управляющих сигналов на вентилитрехфазногомостовогопреобразователя позволяют обеспечить, за счет увеличения количества управляющих и выходных сигналов на полупериоде в зоне низких и средних выходных частот, улучшение динамических свойств системы в указанных зонах, а также улучшение гармонического состава выходного напряжения. Приведенное видоизменение номинального закона управления в зоне пусковых частот позволяет повысить надежность осуществления весьма важного и сложного режима пуска преобразователя, нагруженного на асинхронный электродвигатель. Отмеченные преимущества могут быть с эффектом использованы как при создании преобразовательных систем для специальных структур электропривода (например, для электроприводов с повышенными пусковыми моментами, для высокодинамичных электроприводов), так и для большинства общепромышленных систем частотно-регулируемого электропривода.
Формула изобретения 1. Способ широтно-кодового управления регулируемым трехфазным преобразователем для электропривода переменного тока с N-кратным, начиная с частоты Fo, диапазоном регулирования частоты и величины выходного напряжения, при котором
основные вентили разных фаз и групп преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл. град, в последовательности +А, -С, +В, -А, +С, -В, при этом, для каждого вентиля в
0 течение одного полупериода от 0 до 180 эл. град, формируют интервал проводимости вентиля, в течение другого полупериода от 180 до 360 эл. град, формируют интервал закрытого состояния вентиля, на централь5 ных внутри полупериодов тактовых интервалах от 60 до 120 и от 240 до 300 эл. град, симметрично относительно середин полупериодов формируют модулирующие сигналы управления, разноименные с
0 соответствующим полупериодом управления, число которых последовательно уменьшают с ростом выходной частоты преобразователя F, причем генерирование ука- занных модулирующих сигналов
5 производят в серединах тактовых подинтер- валов с продолжительностью г, внутри каждого тактового интервала начало первого из подинтервалов и конец последнего из них синхронизируют соответственно с началом
0 и концом тактового интервала, формирование каждого 1-го от начала (и от конца) до середины тактового интервала модулирующего сигнала управления осуществляют при изменении выходной частоты преобразователя
5 от FO до граничной частоты FI , при этом в номинальном режиме работы на поддиала- зонах выходных частот, при которых FI F FH-I (Fi Ft Fi+11), продолжительность А всех модулирующих сигналов управления определяют как Я -m(p с Д
а на частотных поддиапазонах, на которых FI , F Fi, наряду с основным массивом модулирующих сигналов управления с про5 должительностью Я в серединах тактовых
интервалов формируют центральный(моду1 лирующий сигнал с длительностью А, о т личающийся тем, что, с целью улучшения
динамических свойств и гармонического со0 става выходного напряжения преобразователя в пусковом режиме и в диапазоне пониженных и средних частот, достигаемого за счет изменения на начальной частоте FO в К раз продолжительности тактовых под5 интервалов и соответствующего этому увеличения количества импульсов в полуволне выходной кривой, а также с целью повышения надежности осуществления процесса пуска преобразователя, нагруженного на
асинхронный двигатель, на всем диапазоне N-крчтного регулирования частоты и величины чапря копия длшельность т тактовых подынтервалов чзменяют в соответствии с зависимостью
Ј
(MFoK kWolM-O ON
1
ПрП ЭТОМ О ПУСКОВОМ рСЖИМ J И
выходных частот преобразил i } 1ir значения упомянутых граничим, -vuur .13- рсхсдных от одного поддиа,1с)301 mi г - нич к другому, огшеделяюг птпг ч tir как
L(l . ItiiitiL I г °г°М .
±L l LfJiJli jl ii i iL iHl tЈl Ч ,-|Ц2, i)(i и
в этом режиме при F.I F Гн I1 V ,ч.
1
при hi1 - Р Р
А Г
чЩГ-Tp-N
i / Or Ki „ )
Ј- IJfM/ O/ i
J 2r:-TJ R r ( ™ )r a в но.Mипальчом оежиме работы преобразования при iMFc F ; 1}Р-, значения гран ЧН| у ч )с тот FI и FI находят, соответственно, как
, 2.(2И(( CKlfM , 1 Ifilf S (g1 |)(| (K-illT
о - i ™
r iLil lL J J J KNl-Hiilj8b-iH2 OMl kUKjUj
)(i Г(Гк)
Л
приэгом,пои Ps1 Я - г -
А-- I/6F-2(I-1) (vi-1v u
2, Способ по п 1, о т п i ч т ю ш п 11 с я тем, чю в диапазоне оы идЖ Х IJCTO- .ipe- образовагеяя F111 - NF0 продолжительность г тактовых подынтервалов принимают равной Т 1/12F, при этом значение граничной частоты F определяют как.
-KNH((l -к) (h-«
UO-KI
FO3.Способ по п. 2, отличающийся тем. что, с целью улучшения спектоального состава выходного напряжения преобразователя, на всем диапазоне регулирования
формирует внутри интервалов 0-30, 150- 180, 180-210 и 330-360 эл. град, дополнительные модулирующие сигналы управления, при этом местоположения ближних к границам полупериодов фронтов
дополнительных модулирующих сигналов управления определяют путем сдвига на ±60 эл. град, ближних к серединам полупериодов фронтов соответствующих главных модулирующих сигналов управления с продолжительностыо Л
4.Способ по п. 3, отличающийся тем, что длительное i / упомянутых дополнительных си Не)поп упрзплспия определяю твс о о i is e т с г в и ис
зависимостью у - КГ( г - А), применительно к которой для диапазона выходных частот
Kr -0,2G«,anpHNF0 F F
ill
Kl 0,266 N Го 0,193 -0,075 F
ill
N Fo - F
5 Cnocob no n, 3, o г л и ч а ю щ и и с я тг-м чтл рэд лжмтельгюсть у дополни- тольпы модулирующих сигналов управле- НУ(Я находя из соотношения:
. ,
A----arcto
kd 2.(6Ю,
где К номер исключаемой из спектра оы- ходкого напряжения паразитной гармоники, дня часштных поддиапазонов Fr F
FHI,
а также при NF0 F
. . . ikt . k(- .t- fcir 40 A-4s.n -sin
a SinT5
о -„ikf Kifr+ M , kC- &H5, j
- , . № , k № ,/fr ifri , klT. k C-4Sln-TSlnTco5-co5k(,,-5;11i)
а для частотных поддиапазонов Ft F F
л А M№ - КФ- it- . W A 45in-g-smg 6 ПТ
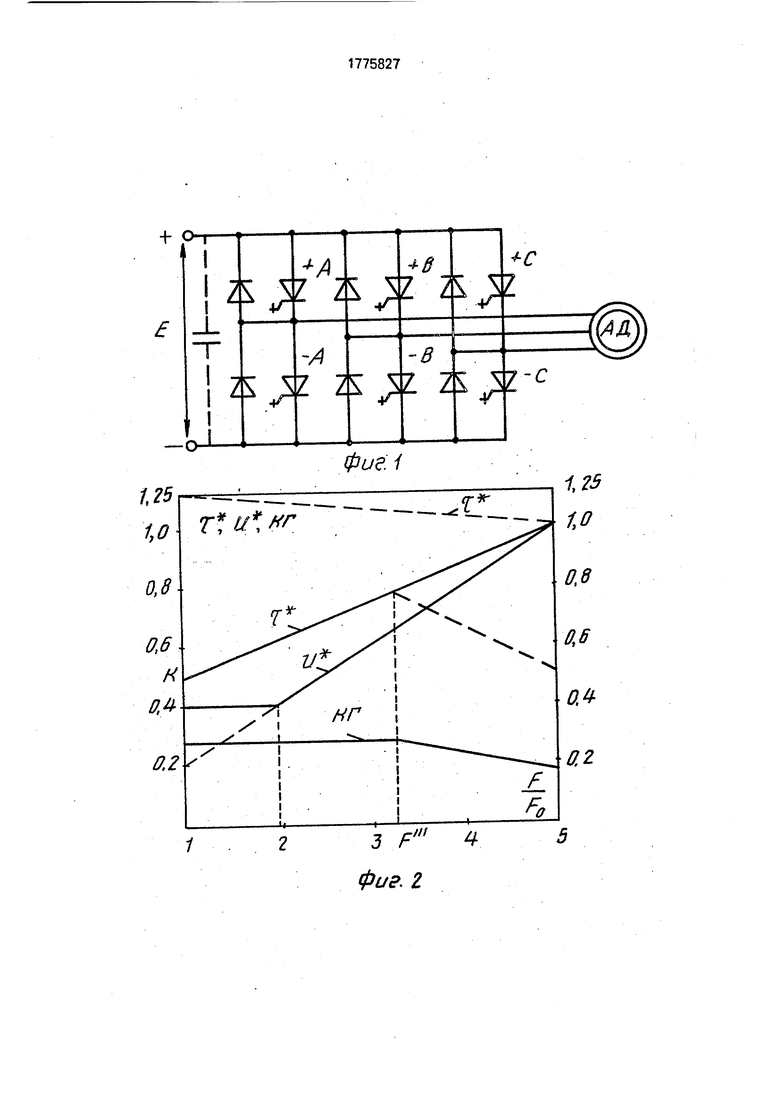
Изобретение относится к способам ши-. ротно-кодового управления регулируемым трехфазным преобразователем для электропривода переменного тока. Способ управления базируется на универсальном 180-градусном алгоритме управления трехфазными преобразователями с модуляцией центральных на полупериодах управления тактовых интервалов и с непрерывным изменением продолжительностей основных и модулирующих сигналов управления, формируемых в тактовых точках. Для увеличения числа импульсов в выходной полуволке на начальных и средних частотах использован асинхронный принцип формирования, при котором начальное количество выходных сигналов определяется специальным вводимым в закон управления коэффициента, а продолжительность тактовых подинтервалов, внутри которых формируются модулирующие сигналы управления, на всем диапазоне регулирования изменяется по линейной зависимости. 4 з.п. ф-лы, 4 ил. СП с
. kt(j-c) )
6- 4stn -„ cos p . i kt . k-A1 k(
sm-j;
. „ . t kt . k-A1 k7 ( .t , kff
С bit -у 5Ш -у COS -g-СОб -- I Sin -j-
. kt . И- /fr (2M) ft k « l+ecoe-gS..n-.
Ј
-О
Фиг: 1
oCf Ofecfj cfyofc
(Vi СУ2
a...
«й
nLJLJL
Фиг 3
| Калашников Б.Е | |||
| и др, Системы управления автономными инверторами | |||
| М.: Энергия, 1974 | |||
| Эпштейн И.И | |||
| Автоматизированный электропривод переменного тока | |||
| М.: Энер- гоиздат, 1982 | |||
| Способ управления трехфазным регулируемым мостовым инвертором | 1987 |
|
SU1492434A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
