Изобретение относится к электротехнике (подкласс силовой преобразовательной техники и электропривода) и может быть использовано при управлении преобразователями для частотно-регулируемого электропривода переменного тока на базе автономных инверторов напряжения.
Известны несимметричные алгоритмы управления ключами трехфазных мостовых преобразователей с 180-градусным управлением, при которых управляющие модулирующие сигналы формируются на крайних участках тактовых подинтервалов, на которые разбиваются тактовые интервалы 60- градусных продол жите л ьностеи
Однако спектральный состав выходного напряжения преобразователей с подобными законами управления является не совсем хорошим и часто нуждается в специальном улучшении
Известен также способ управления преобразователем, обеспечивающий улучшенную форму выходного напряжения характерной особенностью которого является формирование модулирующих управляющих сигналов внутри крайних тактовых интервалов полупериодов проводимости и закрытого состояния вентилей
Однако широкодиапазонное регулирование выходной частоты преобразователей сопровождаемое изменением копичествя
а
vj о
Ј
импульсов в выходной полуволне, при управлении по алгоритму осуществляется дискретным путем и вызывает броски тока в силовых цепях в моменты перехода от одного поддиапазона регулирования к другому.
Целью изобретения является повышение качества процесса регулирования за счет плавного безударного изменения формы вы- ходного напряжения преобразователя.
При управлении по способу, обеспечивающему N-кратное связанное регулирование частоты и величины выходного напряжения преобразователя по закону постоянства отношения величины напряжения к частоте, при котором основные вентили разных фаз и групп преобразователя периодически включает и выключает с взаимным фазовым сдвигом в 60 эл. град в последовательности +А, -С, +В, -А, +С, -В, при этом для каждого вентиля формируют положительные полупериоды проводимости и отрицательные полупериоды закрытого состояния, каждый из которых состоит из трех тактовых интервалов 60-градусных продолжительлостей, внутри крайних на полупериодах тактовых интервалов формируют модулирующие сигналы (импульсы) управления, продолжительность которых определяет величину выходного напряжения преобразователя, формирование указанных модулирующих сигналов управления на всем диапазоне регулирования, начиная с начальной частоты F0, осуще- ствляют в серединах тактовых подинтервалов с продолжительностью r f Fo
6 F ( F0 N + Fo - F )
причем середины
упомянутых тактовых интервалов синхронизируют с серединой соответствующего цент- ральногд тактового подинтервала (при нечетном N) или с концом и началом Соответствующих центральных тактовых подинтервалов (при четном N), при этом на частотных поддиапазонах F i F F 1-1-2, а также, при
Fo n E
нечетном N, в диапазоне F 3- -F-- . внутto
ри тактовых интервалов формируют по I модулирующих сигналов управления с
1/1Ео ч
длительностью fr ( р рг Ё N
на
Я -
i Г3
и i
П-р-Кгч РсГ--Т -о Е N
частотных поддиапазонах Fi F F i на крайних участках тактовых интервалов формируют сигналы управления с длительностью
1 Т2Т
j.„ . Ј-.-ггн а продолжительность ос1 i Го t ( I - I) I М
тальныхО-2)-и.игн, управления определяют
в
А
соответствии
Fo
зависимостью Ео
5 F ( Fo N + Fo - F ) 6F0E(i-1)N значения граничных частот F i и F i, переходных от одного поддиапазона регулирования к другому, находят как
E0((i-0-J Ee()tEN(i-0 z-4E«,EN(;-i(
F.-F,
2Е„
М-ШИЫСЕ М-ЕМО-ОГ- Е (i-0(i-N-0 Ж0
где ,4,6...N при четном N и ,5,...N при нечетном N, минимальная (базовая) и текущая амплитуды питающего преобразова15 тель постоянного напряжения обозначены соответственно как Е0 и Е.
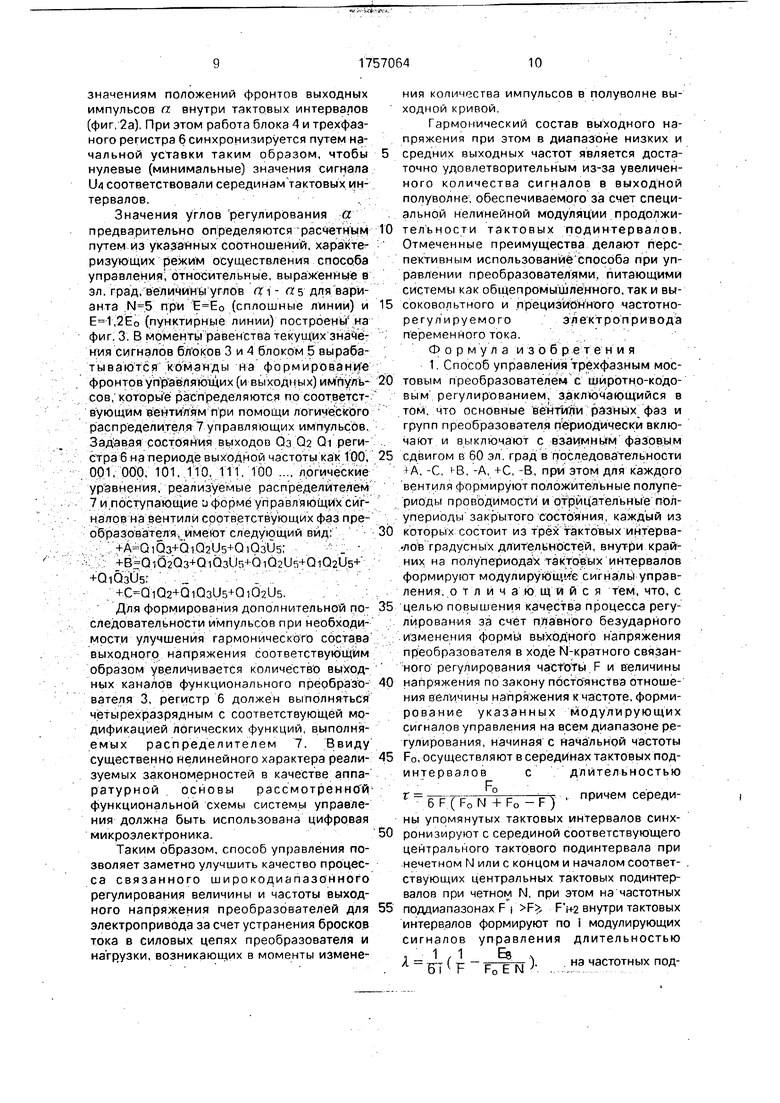
На фиг. 1 представлена упрощенная схема силовых цепей трехфазного мостового преобразователя, выполненного на пол20 ностью управляемых вентилях; на фиг. 2 - временные диаграммы, иллюстрирующие способ управления; на фиг. 3 - кривые, показывающие изменение продолжительности тактовых подинтервалов и углов
25 управления в процессе регулирования преобразователей; на фиг. 4 -функциональная схема системы управления преобразователем, реализующей способ.
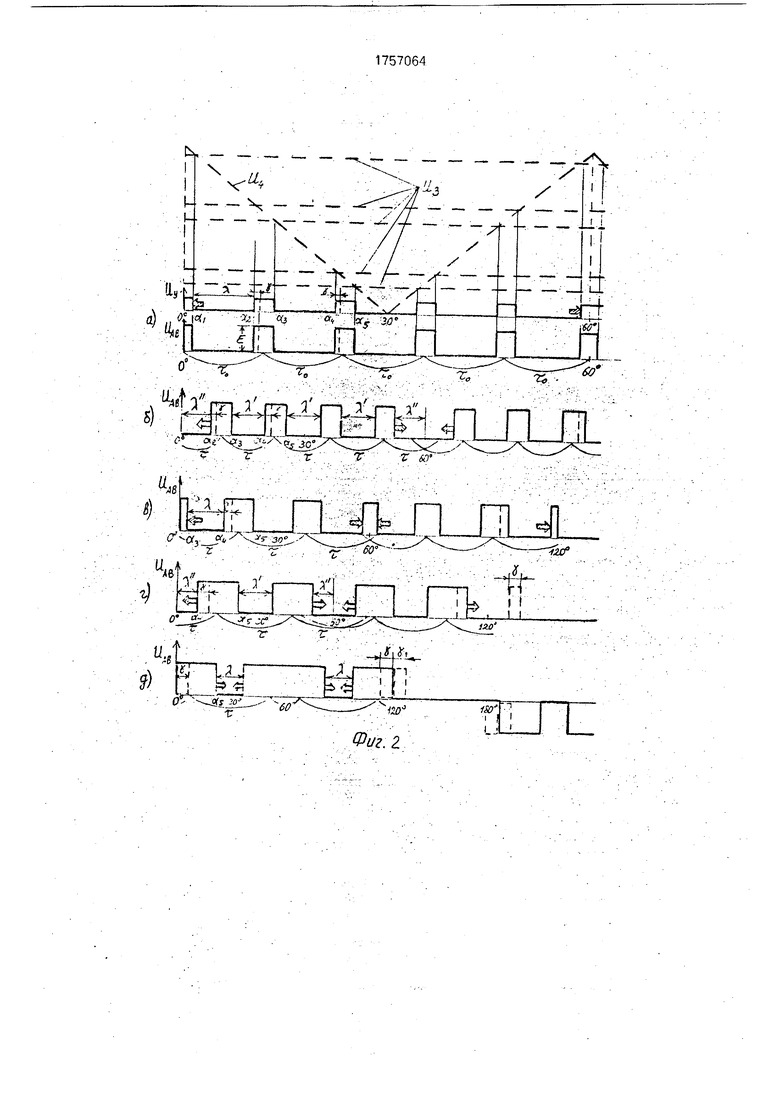
На верхней временной диаграмме (фиг.
30 2а) показан управляющий сигнал Uy, поступающий на вентиль +А на интервале времени 0-60 эл. град в течение первого тактового интервала положительного полупериода про водящего состояния вентиля, на началь35 ной (минимальной) выходной частоте преобразователя Fo. На интервале 120-180 эл. град управляющие сигналы формируются аналогично, а на полупериоде закрытого состояния вентиля 180-360 эл. град аналогич40 но и симметрично указанным формируются инверсные сигналы управления. Ниже построен соответствующий участок кривой линейного выходного напряжения преобразователя UAB. Построенные кривые
45 соответствуют варианту пятикратного, при минимальном питающем напряжении, диапазона связанного регулирования частоты и величины напряжения (). В этом случае тактовый интервал 0-60 эл. град (и 120-180
50 эл. град) на начальной частоте F0 разбит на 5 тактовых подинтервалов одинаковой длительности Г0 , равной 12 эл. град каждый, внутри и посередине каждого из которых формируются модулирующие сигналы уп55 равления, разноименные с соответствующим полупериодом, имеющие в общем виде п родолжител ьность 1 , „ Ео
Ло
6N Fo
(1 - -р-гг) , где Ео и Е - соотЕ N
При этом харакветственно минимальная (номинальная) и текущая величины питающего преобразователь напряжения. В случае при
Ло - ( 1 -i -9.6 эл. град. 5о
Увеличение выходной частоты преобразователя сопровождается изменением продолжительности т тактовых подинтервалов, осуществляемой по зависимости
бТТРо N - Fl терной особенностью рассматриваемого алгоритма управления является то, что в данном случае при нечетном N на всем диапазоне регулирования середины каждого из тактовых интервалов (т.е точки с ординатами 30, 150, 210, 330 эл. град) синхронизируются с серединами соответствующих центральных тактовых подинтервалов. В случае четной величины N середины тактовых интервалов синхронизируют с концом и началом соответствующих двух центральных тактовых подинтервалов.
Процесс регулирования частоты выходного напряжения преобразователя сопровождается при этом постоянной попеременной вариацией, как показано стрелками (фиг. 2), длительностей основных и модулирующих сигналов управления, формируемых по краям тактовых интервалов. При этом для поддержания постоянства отношения величины выходного напряжения преобразователя к частоте на поддиапазонах регулирования, на которых по краям тактовых интервалов формируются основные сигналы управления, длительности модулирующих сигналов управления варьируют в зависимости от текущих значений выходной частоты F и от количества f формируемых внутри тактовых интервалов модулирующих сигналов управления в соответствии с выражением
ЕЈ)
Fo E N
Внутри поддиапазонов регулирования, на которых по краям тактовых интервалов синтезируются модулирующие сигналы управления, их (крайних на тактовых интервалах модулирующих сигналов)
продолжительность Я определяется как ; 1 г ч . ) FQ i
Ллп г- I I- м I г-г: J
J- 1 ( 1 (F
12 F Ео
Fo N + Fo - F i, а длительность Яосталь12 F0E(1-1)N ных (1-2)-и модулирующих сигналов управле- нияопределяетсякак
1 6F(F0N +Fo -F)6FoE(i-1)
Значения граничных частот, переходных от одного поддиапазона к другому, при этом находятся соответственно как
5 F
EfN iVFNl.-0 E0lNMl-EN(«- r-4fflEN(,-rtf,-N-0
ж Г all
0
5
0
5
, F0(NMUEN((MtEN(i-0 2-4EaEN(i-i(N-, + J) F, F.щ3
Для всех рассматриваемых вариантов 0 управления на первом, начиная с частоты FO, поддиапазоне регулирования выходной частоты преобразователя вверх от начального значения процесс регулирования осуществляется путем последовательного 5 изменения (уменьшения, как показано стрелками на фиг. 2а) продолжительности крайних на тактовых интервалах основных сигналов управления, Продолжительность Я модулирующих сигналов управление на этом поддиапазоне при и изменяет,1,1Ео ч
ся по зависимости л - - (-г )
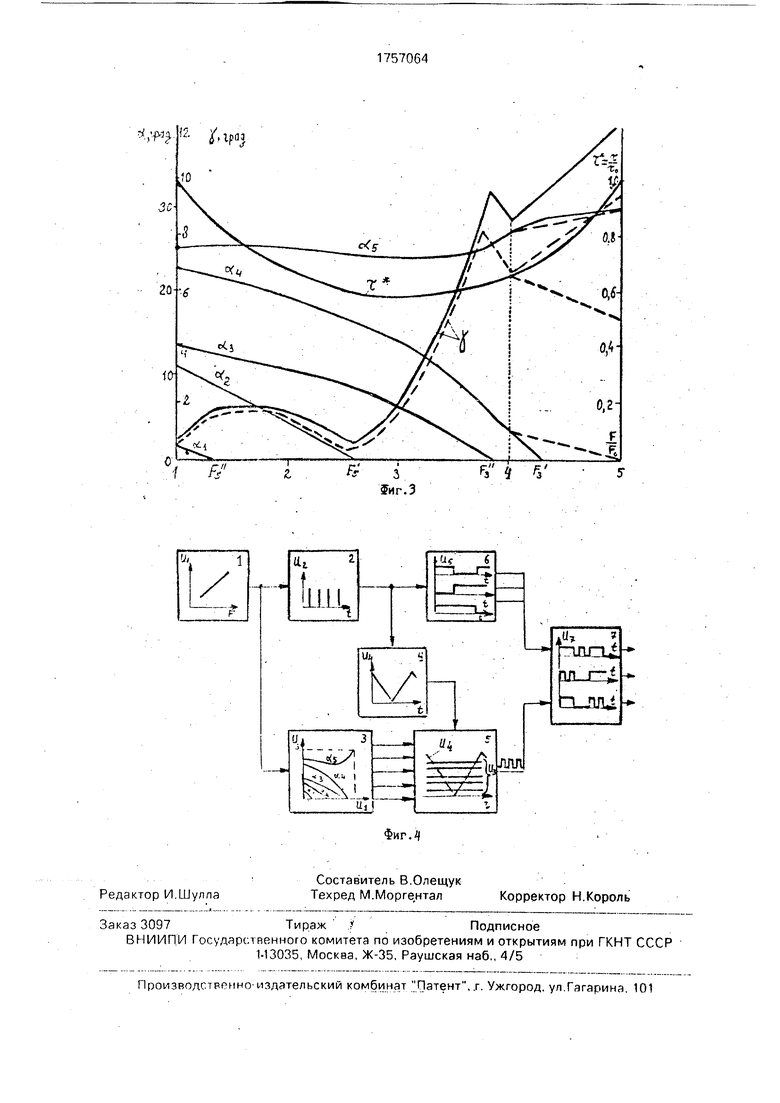
Продолжительность т тактовых подинтервалов, как показано на кривой изменения г (фиг. 3), на этом поддиапазоне регулирования резко уменьшается при повышении частоты, чем обеспечивается увеличение числа выходных импульсов в полуволне и улучшение гармонического состава выходного напряжения.
Верхняя граница отмеченного первого частотного поддиапазона наблюдается на частоте F 5 1,31 F0, рассчитанной из условия , на которой продолжительность крайних на тактовых интервалах основных сигналов управления уменьшилась до близких к нулю значений.
На следующем поддиапазоне регулирования (фиг. 26) по краям тактовых интерва- 0 лов формируются модулирующие сигналы с продолжительностью Я , а длительность остальных модулирующих сигналов равна
Я1 , при этом Я1 и Я определяется из 5 выражений подстановкой соответствующих и . Верхней границей этого поддиапазона (при ) является частота Е 5 2,56Е0, на каждой продолжительности Я снижаются до близких к нулю значений. 0Следующий поддиапазон управления
лежит в зоне выходных частот F 5 F F ,83F0 и характеризуется уменьшенным на две единицы количеством модулирующих сигналов управления внутри тактовых 5 интервалов () (фиг. 2в). В этой зоне, как следует из кривых (фиг. 3), наблюдается, начиная с частоты , постепенное увеличение абсолютной продолжительности т тактовых подинтервалов. В диапазоне выходных частот преобразователя 4,6F0 (при E-F-Q). которому соответствуют временные диаграммы линейного выходно- чго напряжения (фиг. 2), формируются два крайних модулирующих сигнала с продолжительностью А и один центральный с
длительностью А , а с частоты РЗ и до верхней (номинальной) частоты преобразо- N F0E
сигнальной выходной частоты гфеобрэзовас F0 N Е
теля l-m , продолжительность такto
товых подинтервалов поддерживать равной т - тут: Задаваясь, в частности, номевателя Fm
ром к подлежащей полному исключению из спектра выходной кривой гармонической составляющей, величина у на всем диэпа(фиг. 2д) в центрах так- Ю зоне регулирования может быть определена
как
товых интервалов формируется по одному модулирующему сигналу управления с продолжительностью
1 1 / 1Ео ч з 1 / 1ЕО
Я-Б() Я-Б()ДЛЯ
случая . При варианте четной величины индекса N указанная величина совпадает с рассчитываемыми по указанным зависимостям граничными значениями частот F 2 и F 2
Для улучшения гармонического состава выходного напряжения преобразователя целесообразно модифицировать алгоритм управления таким образом, чтобы в кривой выходного сигнала на всем диапазоне регулирования формировалась, как показано пунктиром (фиг. 2), дополнительная последовательность выходных импульсов, гармо- нические составляющие которой, суммируясь в противофазе с гармониками основного массива выходных импульсов, способствовали бы тем самым устранению (уменьшению) амплитуд наиболее нежелательных паразитных гармоник результирующей кривой
Для этого должна соответствующим образом измениться продолжительность модулирующих сигналов управления, формируемых в ближних к границам соот- ветствукЛцих полупериодов половинах тактовых интервалов. При этом внутри положительных полупериодов проводимости продолжительности модулирующих сиг налов должны быть увеличены на определенную величину уо, а внутри отрицательных полупериодов закрытого состоя- ниядлительноститребуемых
модулирующих сигналов должны уменьшаться на ту же величину Процесс отмеченного изменения продолжительности модулирующих сигналов управления осуществляется в этом случае соответствующим сдвигом дальних по отношению к границам полупериодов фронтов модулирующих сигналов управления
Для обеспечения полноценной компенсации амплитуд паразитных гармоник на верхнем Амапазоне регулирования целесообразно, начиь я с частоты (N-1)Fo и до мак15
30
35
40
45
50
55
v 2 „rptn A-VA2-4C(B+C)
у - к arctg2 Г -±
где
-smk(f-A),
гk лг . l
С - cos - sin - о
для частотных поддиапазонов F i F F i+, а также при F, (N-1)F0:
r-AJ . kri -т,- sin -j- ,
, для нечетных N и четных N.
Характер изменения относительной, выраженной в эл, град, величины у для конкретного анализируемого режима () для (сплошные линии) и ,2Е0 (пунктирные линии) показан на фиг. 3.
Обобщенная функциональная схема системы управления преобразователем выполнена по вертикальному принципу и реализует способ управления (фиг. 4). На выходе блока 1 задания частоты формируется сигнал Ui, прямо пропорциональный значению выходной частоты преобразователя, который поступает на входы тактового генератора 2 и функционального М-канального по выходу преобразователя 3. Частота следования импульсов генератора 2 определяет частоту выходного сигнала блока (генератора) развертывающего пилообразного напряжения 4, которая при этом на всем диапазоне регулирования в 6 раз выше выходной частоты преобразователя.
Сигнал генератора 4 непрерывно сопоставляется в блоке 5 формирования управляющих импульсов с выходными сигналами Уз функционального преобразователя 3, величина которых пропорциональна текущим
сигнальной выходной частоты гфеобрэзовас F0 N Е
теля l-m , продолжительность такto
товых подинтервалов поддерживать равной т - тут: Задаваясь, в частности, номе15
v 2 „rptn A-VA2-4C(B+C)
у - к arctg2 Г -±
где
-smk(f-A),
0
5
0
5
0
5
гk лг . l
С - cos - sin - о
для частотных поддиапазонов F i F F i+, а также при F, (N-1)F0:
r-AJ . kri -т,- sin -j- ,
, для нечетных N и четных N.
Характер изменения относительной, выраженной в эл, град, величины у для конкретного анализируемого режима () для (сплошные линии) и ,2Е0 (пунктирные линии) показан на фиг. 3.
Обобщенная функциональная схема системы управления преобразователем выполнена по вертикальному принципу и реализует способ управления (фиг. 4). На выходе блока 1 задания частоты формируется сигнал Ui, прямо пропорциональный значению выходной частоты преобразователя, который поступает на входы тактового генератора 2 и функционального М-канального по выходу преобразователя 3. Частота следования импульсов генератора 2 определяет частоту выходного сигнала блока (генератора) развертывающего пилообразного напряжения 4, которая при этом на всем диапазоне регулирования в 6 раз выше выходной частоты преобразователя.
Сигнал генератора 4 непрерывно сопоставляется в блоке 5 формирования управляющих импульсов с выходными сигналами Уз функционального преобразователя 3, величина которых пропорциональна текущим
значениям положений фронтов выходных импульсов а. внутри тактовых интервалов (фиг 2а) При этом работа блока 4 и трехфазного регистра 6 синхронизируется путем на- чальной уставки таким образом, чтобы нулевые (минимальные) значения сигнала 1М соответствовали серединам тактовых интервалов.
Значения углов регулирования а предварительно определяются расчетным путем из указанных соотношений, характеризующих режим осуществления способа управления , относительные, выраженные в эл. град, величины углов а 1 - «5 для варианта при (сплошные линии) и ,2Е0 (пунктирные линии) построены на фиг 3 В моменты равенства текущих значения сигналов блоков 3 и 4 блоком 5 вырабатываются команды на формирование фронтов управляющих (и выходных) импулъ- сов, которые распределяются по соответствующим вентилям при помощи логического распределителя 7 управляющих импульсов Задавая состояния выходов Оз Q2 СИ регистра 6 на периоде выходной частоты как 100, 001, 000, 101, 110, 111, 100 , логические уравнения, реализуемые распределителем 7 и поступающие а форме управляющих сиг- наяов на вентили соответствующих фаз преобразователя, имеют следующий вид
+A -QiQ3+QiQ2U5+QiQ3U5;
+B QiQ2Q3+QiQ3l 1+ChQ2U-i+QiQ2U5+ +QiQ3Us:
+C QiQ2+QiQ3U5+Q 1621)5
Для формирования дополнительной по- следовательности импульсов при необходимости улучшения гармонического состава выходного напряжения соответствующим образом увеличивается количество выходных каналов функционального преобразо- вателя 3, регистр 6 должен выполняться четырехразрядным с соответствующей модификацией логических функций, выполняемых распределителем 7. Ввиду существенно нелинейного характера реали- зуемых закономерностей в качестве аппаратурной основы рассмотренной функциональной схемы системы управления должна быть использована цифровая микроэлектроника.
Таким образом, способ управления позволяет заметно улучшить качество процесса связанного широкодиапазонного регулирования величины и частоты выходного напряжения преобразователей для электропривода за счет устранения бросков тока в силовых цепях преобразователя и нагрузки, возникающих в моменты изменения количества импульсов в полуволне выходной кривой
Гармонический состав выходного напряжения при этом в диапазоне низких и средних выходных частот является достаточно удовлетворительным из-за увеличенного количества сигналов в выходной полуволне, обеспечиваемого за счет специальной нелинейной модуляции продолжительности тактовых подинтервалов. Отмеченные преимущества делают перспективным использование способа при управлении преобразователями, питающими системы как общепромышленного, так и высоковольтного и прецизионного частотно- регулируемогоэлектропривода переменного тока
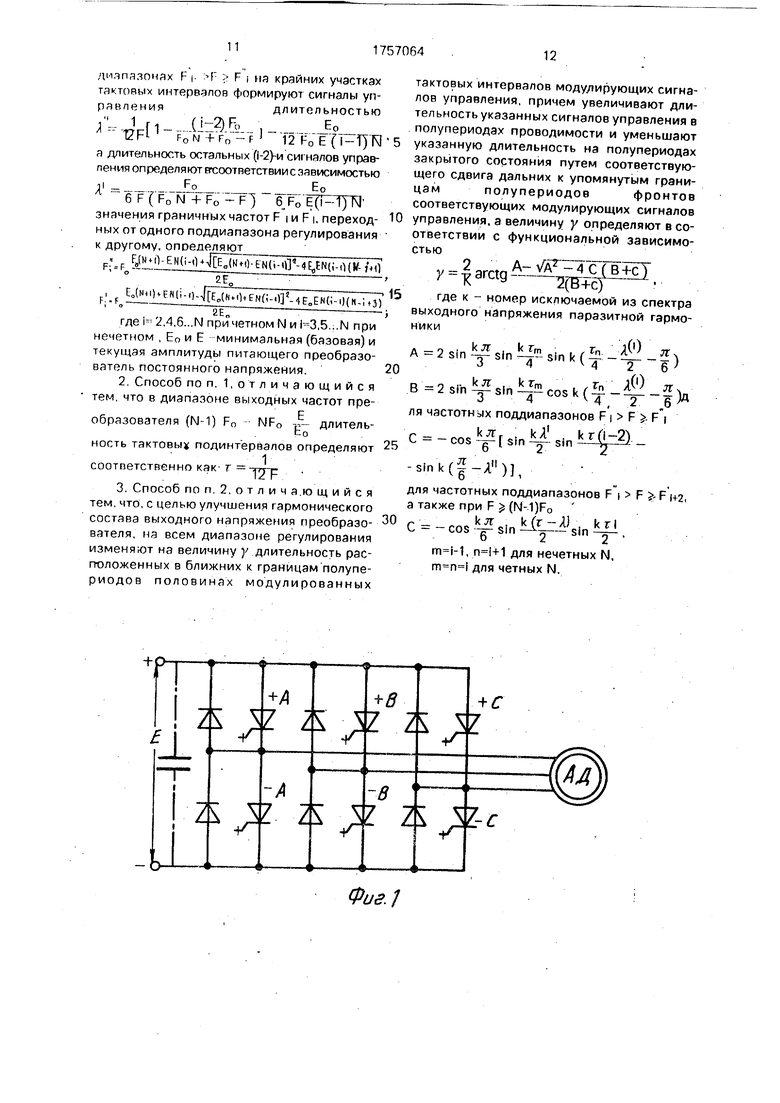
Формула изобретения 1 Способ управления трехфазным мостовым преобразователем с щиротно-кодо- вым регулированием, заключающийся в том, что основные вентили разных фаз и групп преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл град в последовательности f-А. -С В, -А, +С, -В, при этом для каждого вентиля формируют положительные полупериоды проводимости и отрицательные полупериоды закрытого состояния, каждый из которых состоит из трех тактовых интерва- лов градусных длительностей, внутри крайних на полупериодах тактовых интервалов формируют модулирующие сигналы управления отличающийся тем, что, с целью повышения качества процесса регулирования за счет плавного безударного изменения формы выходного напряжения преобразователя в ходе N-кратного связанного регулирования частоты F и величины напряжения по закону постоянства отношения величины напряжения к частоте, форми- рование указанных модулирующих сигналов управления на всем диапазоне регулирования, начиная с начальной частоты FO, осуществляют в серединах тактовых под- интерваловсдлительностью
Fo
Т -
причем середи6 F ( FO N + Fo - F) ны упомянутых тактовых интервалов синхронизируют с серединой соответствующего центрального тактового подинтервала при нечетном N или с концом и началом соответствующих центральных тактовых подинтервалов при четном N, при этом на частотных поддиапазонах F , F, F ,+2 внутри тактовых интервалов формируют по i модулирующих сигналов управления длительностью 1,1 Б5
А
FTF
на частотных поддиапазонах F i Г F i ня крайних участках готовых интервалов формируют сигналы управлениядлительностью
1 г, Q-2) Fo ,J-o
FO N f г о F J Fo E (1 -1) R 5 а длительность остальных (1-2)-и CHI налов управления on ределя ют исоответствии с зявисимостью
X ---- р 1
Fo
Ер
( Fo N 4- Fo Fl 6 Fo E(i-1) N значения граничных частот F i и F i, переходных от одного поддиапазона регулирования к другому, определяют
F Г . - b-JCE N-O-ENd- Nti-Oty- Q ЁО
F .F .)- Г0Г«и)ем(;-оЗг-4е0Ем{;-1)(М.;
, О jfЈ---
где 1 2,4,6...N при четном N и K3.5...N при нечетном , Е0 и Е минимальная (базовая) и текущая амплитуды питающего преобразователь постоянного напряжения.
2.Способ по п. 1,отличающийся тем, что в диапазоне выходных частот преобразователя (N-1) F0 NF0 -с- длительto
ность тактовые подинтервалов определяют
1 соответственно как
3.Способ поп 2. отличающийся тем, что, с целью улучшения гармонического состава выходного напряжения преобразователя, на всем диапазоне регулирования изменяют на величину у длительность расположенных в ближних к границам полупериодов половинах модулированных
0
5
тактовых интервалов моду/тирующих сигналов управления, причем увеличивают длительность указанных сигналов управления в полупериодах проводимости и уменьшают указанную длительность на полупериодах закрытого состояния путем соответствующего сдвига дальних к упомянутым границам полупериодовфронтов соответствующих модулирующих сигналов управления, а величину у определяют в соответствии с функциональной зависимостью
v 2 ягггп A- у к arctg в+ср-
где к - номер исключаемой из спектра выходного напряжения паразитной гармоники
А 2 sin k (If -№ (5l-A0)
-) S)A
3 0 4 --v( 2 ля частотных поддиапазонов F i F Ј.
С - cos
fsin 6 I sin 2
sin
2)
i / Л ill i
-smk(p -A),
0
для частотных поддиапазонов F i F Ј- F1+2, а также при F (N-1)F0
С - cos
k . k(r-A) . krl
-- с In
sin
IлOKI/-
, для нечетных N, для четных N.
Сущность изобретения способ управления заключается в периодическом включении с взаимным фазовым сдвигом в 60 эл. град основных вентилей трехфазного мостового преобразователя при этом зоны проводимости и закрытого состояния каждого вентиля составляют по 180 эл. град, Регулирование выходного напряжения осуществляется при этом изменением продолжительности модулирующих сигналов, формируемых внутри крайних 60-градусных тактовых интервалов упомянутых зон проводимости i закрытого состояния вентилей Связанное регулирование выходной частоты и величины выходного напряжения предложено производить зэ счет непрерывной плавной вариации длительностей основных и модулирующих сигналов управления, формируемых у границ упомянутых крайнихтактовых интервалов Продолжительность тактовых подинтервалов,внутри и посередине которых формируются модулирующие сигналы управления, на всем диапазоне регулирования изменяется по нелинейной зависимости, обеспечивающей рациональное количество выходных импульсов в полуволне выходной кривой на каждом частотном поддиапазоне. 2 з.п. ф-лы, 4 ил СП С
Фиг.}
-Г--нгк
ч- to о г- ю гALJIJ)
vo
Oi
1 Fs
и,
| Забродин Ю С Автономные тиристор- ные инверторы с широтно-импульсным регулированием.-М Энергия, 1977, гл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления автономным инвертором напряжения с широтно-импульсным регулированием | 1986 |
|
SU1361692A1 |
