Изобретение относится к силовой электронике и может быть использовано при управлении вентильными преобразователями, питающими индивидуальные или групповые системы частотно ре улируемого асинхронного электропривода
Известны алгоритмы 120- и 150-градусного управления трехфазными мостовыми преобразователями обеспечивающие сравнительно хороший гармонический состав кривой выходного сигнала, форма которой однако в этих случаях существенно зависит от характера и параметров нагрузки, что ограничивает широкое применение подобных алгоритмов управления в преобразователях для электропривода
Известен также инвариантный к параметрам нагрузки способ 180-градусного управления трехфазным мостовым преобразователем, характерной особенностью которого является то, что модулирующие управляющие сигналы, количество и продолжительность которых определяет величину выходного напряжения преобразователя, формируются внутри крайних тактовых интервалов 60-градусных продолжительностей (в общем случае на начальной частоте Реформируется внутри соответствующих подинтервалов п сигналов) входящих в состав положительного полупериодч проводимости каждого вентиля и отрицательного полупериода закрытого состояния
4 СЛ xj
О U)
Однако при широкодиапазонном регулировании выходной частоты преобразователя последовательное изменение количества выходных импульсов в полуволне выходного напряжения осуществляется дискретным путем и приводит к появлению нежелательных бросков тока в силовых цепях в моменты перехода от одного поддиапазона регулирования к другому.
Целью изобретения является повышение качества процесса регулирования преобразователя за счет плавной безударной вариации формы выходного напряжения в ходе связанного регулирования частоты F и величины выходного напряжения по закону постоянства отношения величины напряжения к частоте в диапазоне выходных частот . Fo n E
ГО 1 г-
При управлении по способу, при котором основные вентили разных фаз и групп преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл. град в последовательности +А, -С, +В, -А, +С, -В, при этом для каждого вентиля формируют положительные полупериоды проводимости и отрицательные полупериоды закрытого состояния, каждый из которых состоит из трех тактовых интервалов 60-градусных продолжительностей, внутри крайних на полупериодах тактовых интервалов формируют модулирующие сигналы (им- пульсы)управления, продолжительность которых определяет величину выходного напряжения преобразователя, причем на начальной выходной частоте Fa тактовые интервалы разбивают на четное количество подинтервалов, в диапазоне частот
г- n E FO
FO в Центрах указанных тактовых интервалов формируют разноименные с соответствующим полупериодом дополнительные сигналы управления с продолжительностью 1/30F, длительность тактовых подинтервалов определяют как 0,8/6F0n, a формирований модулирующих сигналов управления осуществляют в серединах тактовых подинтервалов, середины крайних на интервалах 24-градусных участков синхронизируют с серединой соответствующего центрального на половине тактового интервала тактового подинтервала (при нечетной величине п/2) или с концом и началом соответствующих центральных на 24-градусных участках тактовых подинтервалов (при четном значении п/) при ттом на частотных поддиапазонах F , Т F ц. внутри указанных 24-градусных учлстков.формируют по i модулирующих сигналов управления с дли0
5
0 Я 1 9 F
тельностьюЯ--(-р ), на частотных поддиапазонах на краях 24-градусных участков формируют сигналы управления с длительностью
;i OJL MlLJLH -Ч)Е + 0,8 Ео 24 F12 F0
а продолжительность остальных (i-2) и сигналов управления определяют в соответствии с зависимостью
; -0.8(1-1)Е-0.8Ео
Л6F0nE(l-1)
значения граничных частот, переходных от одного, поддиапазона регулирования к другому (F i F i), находят как
0
Р FonEQ-1
н-ТГРГУП ТЕ-
0
5
0
5
0
5
в диапазо е выходных частот преобразоваn E Fo n E FO
теля -TT-Fi с г- . в центрах тактовых
2 to 1,о Ео
интервалов синтезируют по одному модулирующему сигналу управления с длительностью
, 1 1.6 Ео Л Ш n E FO
где Ё и Ео - соответственно текущая и минимальная (номинальная) амплитуды питающего преобразователя напряжения
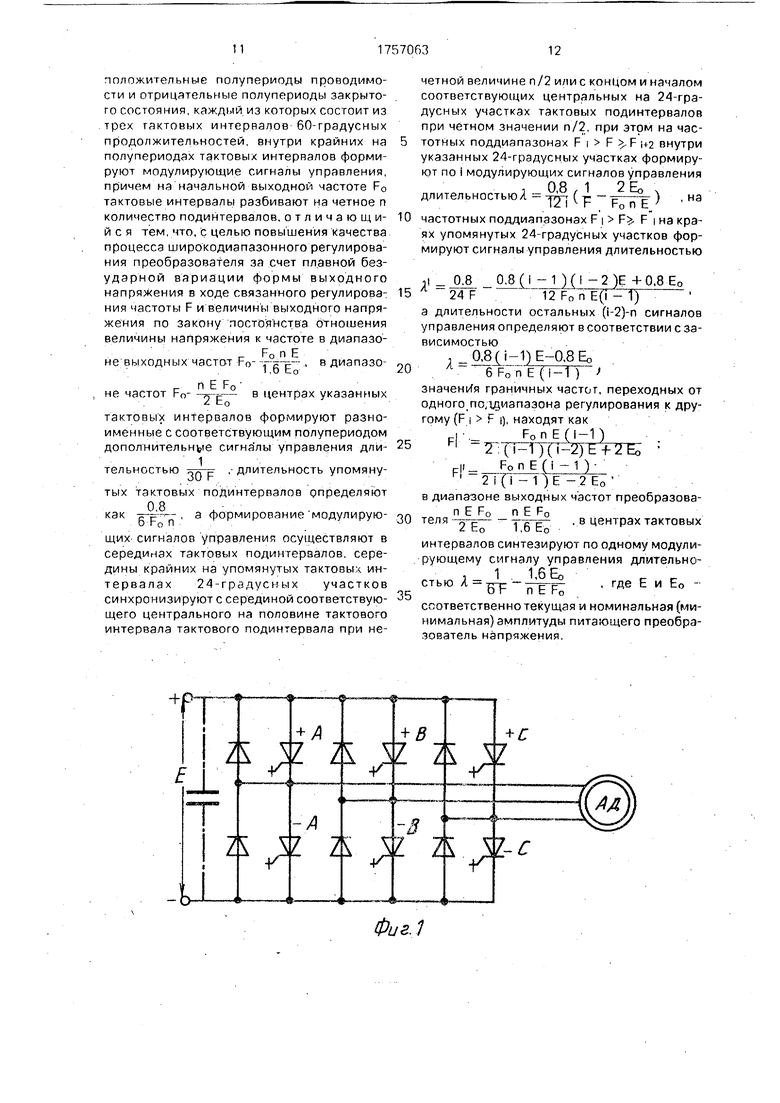
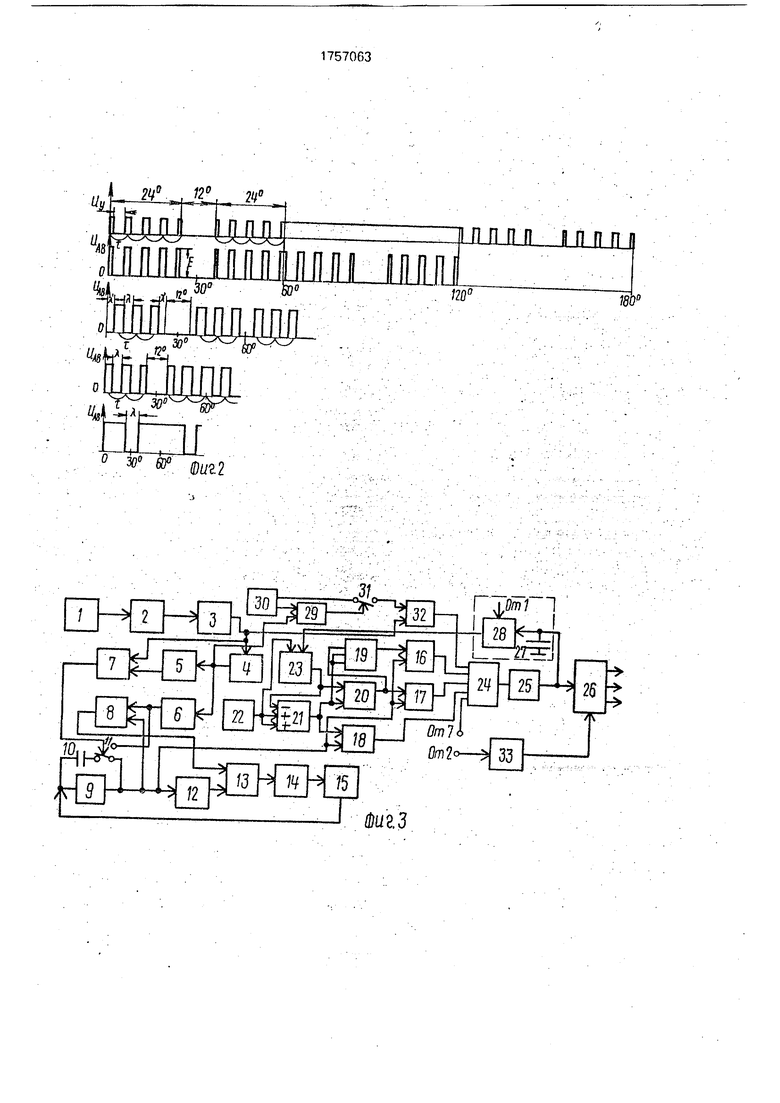
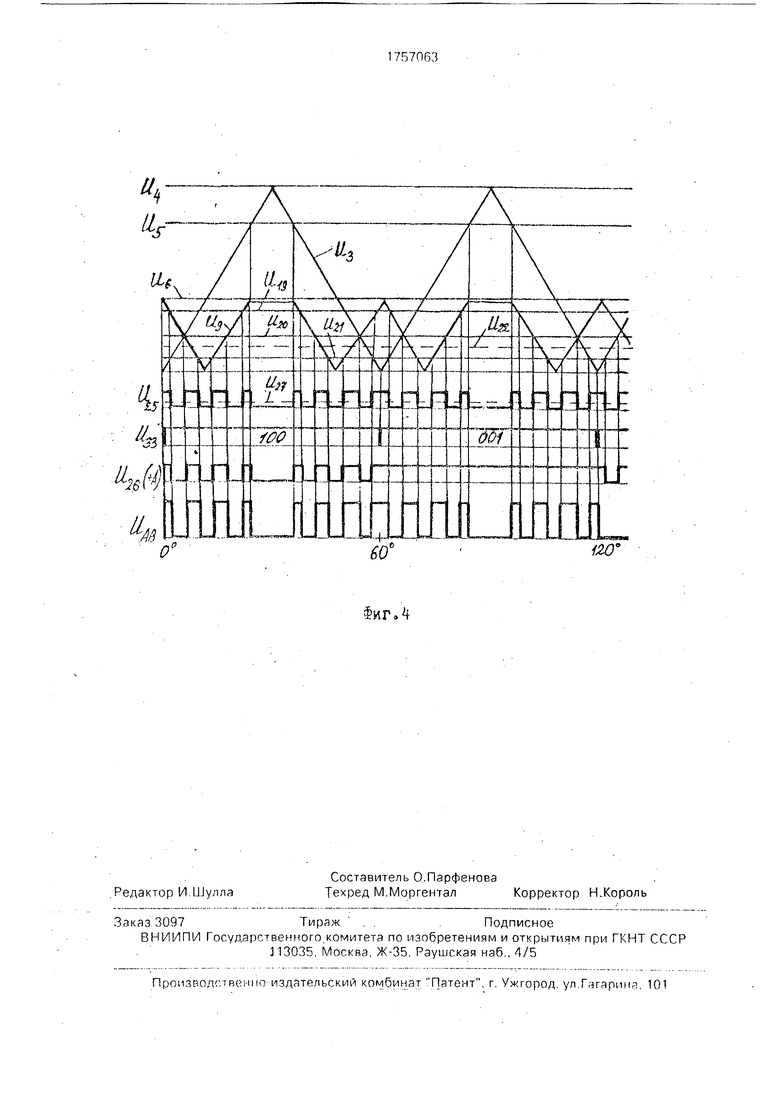
На фиг 1 приведена схема основных силовых соединений трехфазного мостового преобразователя, выполненного на полностью управляемых вентилях на фиг 2 - временные диаграммы, иллюстрирующие алгоритмы формирования управляющих сигналов и кривой линейного выходного напряжения преобразователя; на фиг. 3 - функциональная схема системы управления преобразователем; на фиг 4 - временные диаграммы, иллюстрирующие ее работу.
Временная диаграмма (фиг. 2э) показывает форму управляющего сигнала Uy, синтезируемого в течение положительного полупериода проводимости вентиля +А на начальной выходной частоте F0. Ниже построена соответствующая кривая линейного выходного напряжения преобразователя UAB В соответствии с алгоритмом формирования управляющих сигналов по предлагаемому способу для каждого вентиля на всем диапазоне регулирования положительный полупериод проводимости и отрицательный полупериод закрытого состояния разбиваются на три равных тактовых интервала продолжительностью 60 зл град каждый. При этом формирование модулирующих сигналов управления, разноименных с соответствующим полупериодом управления, от продолжительности которых зависит величина выходного напряжения преобразователя, осуществляется (фиг 2я) внутри крайних тактовых интервалов каждого полупёриод э.
Специфической особенностью способа управления является наличие на большей части диапазона регулирования в серединах тактовых интервалов дополнительных 12-градусных сигналов управления, разноименных с соответствующим полупериодом. Оставшийся 48-градусный участок внутри каждого тактового интервала, состоящий из двух симметричных частей, разбивают на начальной частоте F0 на п отрезкой (подинтервалов) с длительностью, равной 48/п эл. град (фиг. 2, кривые соответствуют варианту ). В середине каждого из отмеченных снизу дугами тактового подинтерва- ла формируются модулирующие управляющие сигналы, количество которых на начальной частоте внутри каждой половины тактового интервала равно п/2.
Общий диапазон связанного регулирования величины и частоты выходного напряжения преобразователя по экономичному закону с постоянством отношения величины напряжения к частоте для способа с учетом флюктуации питающего напряжения составляет
Р Fo n E
h° 1.610
где Е и Ео - соответственно текущая и минимальная (базовая) амплитуды питающего напряжения.
При этом в диапазоне частот FO n E FO -тт-р-регулирование выходной частоты
Ј. Со
осуществляется за счет непрерывной поэтапной вариации продолжительностей основных и модулирующих сигналов управления, формируемых по краям каждого 24-градусного участка соответствующих тактовых интервалов Процесс регулирования при этом проходит двухэтапно по двум основным опорным алгоритмам, при этом граничные значения частот, переходных от одного поддиапазона регулирования к другому, определяются как
..цFO n E (i -1 )
F| TTTFTTM и
iFonE(l-l)
Fl 2(1Т1)( причем F, F i - количество формируемых внутри указанных участков модулирующих сигналов управления. При этом середины 24-градусных участков синхронизируются с
серединой соответствующего центрального тактового подинтервала (при нечетной величине N) или с концом и началом соответст вующих центральных тактовых
подинтервзпов (при четном значении N)
На поддиапазонах регулирования, на которых F i F F 4-2- продолжительность модулирующих сигналов управления определяется как
, 0,8 , 1 2Ео , я Ш ( F ГоТГЁ } (подобным поддиапазонам соответствуют кривые, построенные на фиг. 2а, в). Внутри поддиапазонов регулирования,
соответствующих выходным частотам F i F: F i, по краям 24-градусных участков формируются модулирующие сигналы управления с переменной длительностью
j -РА M Cl rJLlLiii 2 )Е + Q.8 ЕО
24 F12 F0n E(V)
а продолжительность Я остальных (-2)-и модулирующих сигналов при этом равна (фиг 26)
i - °-8 СЬ1) Ео А SFonETi TJ 1
8 диапазоне верхних выходных частот
0
0
5
0
5
преобразователя
n E FO n E FO
Т6Ё7 впР°цес2Е0
се повышения частоты начинает плавно уменьшаться продолжительность центрального на тактовом интервале дополнительного модулирующего сигнала управления,
5 которая при F
- равнялась
(12
2т-| гаог171/,«лWD ог. IсоЛи г
эл. град).v
Указанное изменение осуществляется
, 1 1,6 Ео /. n % по зависимости Я тг-с -е-г (фиг. 2г),
О Г П t Го
величина Я снижается до нуля на верхней выходной частоте Fm л с .-0 (для и
I ,D to
при ), при которой величина выходного напряжения принимает максимальное значение.
Формирование в серединах тактовых интервалов на большей части диапазона регулирования сигналов 12-градусных продолжительностей обеспечивает в этих режимах полное исключение из спектра выходного напряжения пятой гармонической составляющей, что заметно улучшает гармонический состав выходной кривой. Указанный принцип формирования управляющих сигналов, существенной особенностью которого является непрерывное отождествление (кодирование) продолжительностей крайних внутри участков основных и модулирующих управляющих
С
сигналов с основным массивом импульсов, за счет чего осуществляется плавный безударный переход от одного поддиапазона управления к другому, может быть поэтому определен как широтно-кодовый,
Применительно к анализируемому (фиг. 2) варианту (, ), расчетные величины граничных частот принимают следующие значения:
для FVl,09F0; FV1,71F0;
для F 2 F 2-4F0.
Продолжительности модулирующих сигналовА для частотных поддиапазонов F0 F и F 2 F F 4, а также длительности Я и Я на поддиапазоне F« F F 4 опреде- ляются подстановкой соответствующих зна- чен ий i в соответствующие указанные выражения.
Функциональная схема системы управления (фиг.З) реализует режим управления согласно способу для варианта , , на фиг. 4 приведены временные диаграммы ее работы. В этой системе выходной сигнал Ui блока 1 задания частоты поступает на вход генератора 2 тактовых импульсов, фор- мирующего последовательность импульсов, частота следования которых на всем диапазоне регулирования в 12 раз превышает выходную частоту преобразователя. Указанные сигналы поступа ют на вход гене- ратора 3 линейно изменяющегося напряжения, синхронизируя его работу, благодаря чему на выходе генератора 3 формируется (фиг. 4) симметричное в обе стороны напряжение Уз шестикратной частоты по сравне- нию с выходным сигналом преобразователя, амплитуда которого уменьшается пропорционально росту выходной частоты и постоянно фиксируется датчиком 4 амплитуды
С выхЬда датчика 4 сигнал, пропорциональный амплитуде напряжения Уз, поступает через усилители 5 и 6 на входы компараторов 7 и 8, в которых сопоставляется соответственно с выходными напряже- ниями Уз генератора 3 и Us интегратора 9, в цепь накопительного элемента 10 которого включен двухпозиционный ключ 11, управляемый выходным сигналом компаратора 7 Коэффициенты передачи усилителей 5 и б соответственно равны 0,8 и 0,4. На выходе интегратора 9 включен пороговый узел 12 фиксирующий минимальное (нулевое) значение напряжения Ug, который через члемент ИЛИ 13 связан с входом счетного триггера 14, подключенного своим выходе к коммутатору 15 полярности зарядного напряжения интегратора 9, причем пярл Т тг/ы интегратора 9 и амплитуда выходных рэзнополярных сигналов блока 15 подбирается так, что крутизна сигналов Us и Ug идентичная. Начальной уставкой выходных состояний указанных элементов при этом должна обеспечиваться максимальная амплитуда сигнала Уе при минимальной величине напряжения Уз.
На период времени, когда величина сигнала Уз превышает уровень напряжения на выходе усилителя 5, компаратором 7 выдается команда на переключение ключа 11, после которого размыкается цепь конденсатора 10 и подключается на выход блока 9 сигнал Уб. Благодаря приведенной схеме соединения узлов 5-15 на выходе интегратора 9 (фиг. 4),формируется симметричное пилообразное напряжение Уо с повторяющимися интервалами постоянного уровня, равного амплитуде Уг с продолжительностью 12 эл. град, на центральных участках тактовых интервалов.
Указанный сигнал Уд. являясь основным развертывающим напряжением в системе, поступает на входы компэрирующих узлов 16-18, на выходах которых включены цепи формирования коротких однополяр- ных импульсов. На другие входы компариру- ющих узлов 16-18 поступают сигналы с выходов сумматоров 13 и 20 и усилителя 21 с коэффициентом передачи 0,5, на входы которого приходят сигналы с источника 22 опорного напряжения и интегратора 23. В момент равенства сигналов на входах узлов 16-18 системой синтезируются команды (короткие импульсы) на формирование фронтов выходных импульсов, которые через элемент ИЛИ 24 поступают на вход счетного триггера 25, связанного своим выходом с информационным входом логического распределителя управляющих импульсов на вентили преобразователя 26.
Выход триггера 25 связан также с конденсатором 27, выделяющим постоянную составляющую последовательности импульсных сигналов с выхода триггера 25. Напряжение конденсатора 27 поступает далее на целитель 28, в котором осуществляется его деление на аналоговый сигнал задания частоты Ui, в результате чего на выходе делителя 28 в соответствующем масштабе формируется напряжение, пропорци- ональное суммарной на полупериоде длительности выходных импульсов. Этот сигнал поступает далее на минусовой вход интегратора, связанного вторым плюсовым входом с источником 22 опорного напряжения, амплитуда которого У25 -1- . где
Узт - максимальная амплитуда сигнала генераторз 3 наблюдаемая на начальной выходной частоте преобразователя Благодаря приведенному включению амплитуда сигнала на выходе интегратора 23 пропорциональна величине (i- А) длительности основных выходных импульсов Кривой выходного напряжения а сигнал на выходе суммирующего усилителя 21 пропорционален половинной продолжительности А модулирующих сигналов управления.
В процессе связанного регулирования частоты и величины напряжения преобразователя контур внутренней обратной связи системы, включающий узлы и блоки 23, 25. 27 и 28, обеспечивает на диапазоне регулирования от начальной частоты F0 до
FQ П
F2;-непрерывное осуществляемое
по астатическому принципу формирование корректирующего сигнала поступающего на входы сумматоров 19 и 20 и непосредственно на компаратор 18 и автоматически поддерживающего постоянствб суммарной вольтсекундной площади выгодных импульсов на полупериоде в процессе изменения выходной частоты
При этом на указанном диапазоне автоматически выполняется реализация представленных функциональных зависимостей между продолжительностями сигналов управления их временным положением и текущими значениями выходной частоты преобразователя а также автоматический переход от одного поддиапазона регулирования к другому, наблюдаемый на указанных граничных частотах F , и F i
Начиная с частоты
с F°n FT -Yвеличина сигнала U20 превышает амплитуду пилообразного напряжения ид нз полупериоде кривой линейного выходного напряжения синтезируется при этом по три импульса. Величина сигнала U21 на выходе усилителя 21 при дальнейшем увеличении частоты последовательно снижается достигая нулевого значения на частоте F - 0.8Fm.
Полуволна выходного сигнала преобразователя после этого момента и до максималь- FO n
ной частоты Fm
1 6
формируется из трех
импульсов на полупериоде
Указанный момент фиксируется логическим узлом состоящим из компаратора 29, на один вход которого приходит сигнал с выхода датчика 4 амплитуды а на второй поступает постоянное напряжение с первого выхода источника 30 определяемое как
llЛ
Uao (i) - --- По сигналу компаратора
29 происходит замыкание ключа 31, после чего в компзрирующем узле 32 начинается сопоставление текущего значения сигнала Уз с напряжением снимаемым с второго выхода источника 30 и определяемым как
,, , 0 8 Ihm 2 изо(и)- ---
0 На вход трехразрядного регистра 33 на всем диапазоне регулирования поступают импульсы с выхода генератора 2 тактовых импульсов Выраженные в цифровой форме состояния выходных разрядов Оз Q2 Qi pe5 гистра 33 на периоде выходной частоты (фиг 4) записываются соответственно как 100, 001 000 101 110, 111. эти сигналы поступают на тактовые входы логического распределителе 26 Логические функции,
0 реализуемые распределителем 26 и поступающие в форме управляющих сигналов на соответствующие вентили,имеют при этом вид
+A-QiChH Qi 02112 5+01Оз025
5
±В QiQ2QT QiQ3U2 QiQ2U25+QiQ2U25+QiQ3
iC QiQ;t-QiOiU2r)-QiQ2Q25
Таким образом предлагаемый способ
0 позволяет обеспечить плавное безударное
изменение формы выходной кривой на всем
диапазоне регулирования преобразовате.... n E FO
ля, обеспечивая при этом в зоне г о- с ,I ,О to
5 полное устранение в спектре выходного напряжения наиболее нежелательной пятой гармонической составляющей, причем обеспечивается это наиболее простым путем без дополнительных коммутаций венти0 лей силовой схемы вызывающих дополнительные потери электрической энергии Тем самым устраняются нежелательные броски тока в силовых цепях преобразователя и нагрузки что существенно
5 повышает качество процесса преобразования электрической энергии а также надежность функционирования мощных вентильных преобразовательных систем и систем частотно-регулируемого эпектро0 привода в целом
Формула изобретения Способ управления преобразователем с широтно кодовым регулированием, заключающийся в том что основные вентили
5 разных фаз и групп преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл град в последовательнее™ +А -С +В, -А, +С -В, при этом для каждого вентиля формируют
положительные полупериоды проводимости и отрицательные полупериоды закрытого состояния, каждый из которых состоит из трех тактовых интервалов 60-градусных продолжительностей, внутри крайних на полупериодах тактовых интервалов формируют модулирующие сигналы управления, причем на начальной выходной частоте F0 тактовые интервалы разбивают на четное п количество подинтервалов. отличающийся тем, что, с целью повышения качества процесса широкодиапазонного регулирования преобразователя за счет плавной безударной вариации формы выходного напряжения в ходе связанного регулирования частоты F и величины выходного напряжения по закону постоянства отношения величины напряжения к частоте в диапазоr Fo n E не выходных частот F0- , . в диапззоI ,О to
n E FO не частот F0- -гп-- в центрах указанных
. to
тактовых интервалов формируют разноименные с соответствующим полупериодом дополнительные сигна лы управления длидлительность упомяну
тельностью -„« р
тых тактовых подинтервалов определяют
К Э К F0 n
щих сигналов управления осуществляют в серединах тактовых подинтервалов, середины крайних на упомянутых тактовьи интервалах 24-градусиых участков синхронизируют с серединой соответствующего центрального на половине тактового интервала тактового лодинтервала при неа формирование модулирую-
длительностьюЯ
0
5
0
5
Q
5
четной величине п/2 или с концом и началом соответствующих центральных на 24-градусных участках тактовых подинтервалов при четном значении п/2, при этом на частотных поддиапазонах F i F ,Fi+2 внутри указанных 24-градусных участках формируют по i модулирующих сигналов управления 0,8 х 1 2 Ео , Т21 7 7гГЁи) на частотных поддиапазонах F i F F 1 на краях упомянутых 24-градусных участков формируют сигналы управления длительностью
Ji -М - 0.8Q -1 )0 2)Е +0.8Ео
24 F12 Fo n E(i - 1)
а длительности остальных (i-2)-n сигналов управления определяют в соответствии с зависимостью
; -0.8(i-1)E-0.8Eo
6F0nE(l-1)
значения граничных частот, переходных от одного пс,1диапазона регулирования к другому (F i F i), находят как
Fon Efi-Г)
2(i-1)(i-b27E+TEo :
p|i FQ n E (1 - 1 )
2 i - 2 Eo в диапазоне выходных частот преобразоваn E Fo n E F0 теля -ffc-- в центрах тактовых
/ toI ,D to
интервалов синтезируют по одному модулирующему сигналу управления длительно1 1 А Р стью Я ТГг:V с, где Е и Ео ОГПС Го
соответственно текущая и номинальная (минимальная) амплитуды питающего преобразователь напряжения.
F 

Сущность изобретения способ управления заключается в периодическом включе- нии и выключении с взаимным фазовым сдвигом в 60 эл град основных вентилей трехфазного мостового преобразователя. Зоны проводимости и открытого состояния вентилей составляют по 180 эл фад Внутри крайних тактовых интервалов 60 градусных продолжительностей каждой зоны управле ния формируются модул ирующие стналы управления, количество которых внутри каждого упомянутого тактового интервала на начальной выходной частоте Е0 равно U В диапазоне выходных частот преобразователя Fo-U/2 F0 в центральной части упомянутых тактовых интервалов формируют дополнительные модулирующие сигналы управления с продолжительностью в 12 эл град Связанное регулирование частоты и величины напряжения по экономическому закону U/F- const осуществляется при этом за счет непрерывной поэтапной вариации длительностей крайних на 24-градусных участках основных и модулирующих сигналов упоавления в функции текущей и начальной выходных частот, величины диапазона регулирования и амплитуды питающего напряжения 4 ил (Л С
Фиг.1
О 30°
Шг1
О
Фиг Л
| Забродин Ю С Автономные тиристор- ные инверторы с широтно-импульсным регулированием-М Энергия, 1977,§2-1 Авторское свидетельство СССР № 1361692 кл Н 02 М7/48, 1987 |
