Изобретение относится к робототехнике, а также может быть использовано в медицинской технике при протезировании.
Известен модуль робота [1], содержащий оболочку и герметичную камеру, внутри которой расположен микропористый абсорбент, нагреватель и рабочее тело. При подаче питания на нагреватель повышается температура абсорбента, из которого выделяется дополнительное количество абсорбата во внутренний объем камеры. Увеличение объема камеры приводит к ее линейному сокращению.
Основным недостатком известного модуля является большое время удлинения, что определяется медленным охлаждением абсорбента и абсорбцией рабочего тела.
Наиболее близким к предлагаемому является модуль робота [2], содержащий заполненную абсорбатом оболочку и твердое ядро, содержащее нагреватель, охлаждающий элемент Пельтье и микропористый абсорбент. Принцип действия аналогичен. Элемент Пельтье и микропористый элемент позволяет ускорить охлаждение абсорбента и удлинение оболочки.
Дальнейшее увеличение быстродействия данного модуля ограничивается свойствами элемента Пельтье, а также невозможностью быстрого нагрева абсорбента до высоких температур из-за возможных прожогов эластичной оболочки.
Целью изобретения является повышение надежности и быстродействия модуля.
Это достигается тем, что в модуле робота, выполненном в виде камеры, эластичной преимущественно в поперечном направлении и соединенной по краям тягами с рабочими органами, полость камеры соединена через распределитель рабочего тела с аккумулятором давления, содержащим рабочее тело и микропористый сорбент, внутри которого помещены нагревательный и охлаждающий элементы, причем корпус аккумулятора и соединительные трубки выполнены из нерастяжимого теплостойкого материала, камера содержит наполнитель из материала с низкой теплопроводностью, а аккумулятор давления состоит из нескольких однотипных секций.
Вынесение сорбента с нагревателем и охладителем из эластичной оболочки в специальный аккумулятор позволяет интенсифицировать процессы выделения и поглощения абсорбата, увеличивая при этом быстродействие модуля и предохраняя эластичную камеру от перегрева. Наполнитель, находящийся в камере, позволяет уменьшить объем абсорбата, необходимый для сокращения мышцы. Наличие нескольких секций в аккумуляторе позволяет повысить надежность работы и гибкость в управлении модулем.
Предложенный модуль манипулятора удовлетворяет критерию "существенные отличия", так как полость камеры соединена через распределитель рабочего тела с аккумулятором давления, содержащим рабочее тело и микропористый сорбент, внутри которого помещены нагревательный и охлаждающий элементы, причем корпус аккумулятора и соединительные трубки выполнены из нерастяжимого теплостойкого материала, камера содержит наполнитель из материала с низкой теплопроводностью, а также аккумулятор давления, состоящий из нескольких однотипных секций.
На чертеже показан общий вид модуля манипулятора.
Основными частями модуля являются аккумулятор 1 давления рабочего тела, который может состоять из двух или более секций, и камера 2, эластичная преимущественно в поперечном направлении. Они соединены трубкой 3 через распределитель 4 рабочего тела. Аккумулятор 1 заполнен микропористым сорбентом 5, внутри которого помещены нагревающий 6 и охлаждающий 7 элементы. Один край 8 камеры 2, содержащий наполнитель 9, закреплен на основании 10, другой край 11 - гибкой тягой 12 связан с приводимым в движение рабочим органом 13.
Для подвода энергии к нагревающему 6 и охлаждающему 7 элементам аккумулятора 1 предназначены каналы 14, обеспечивающие передачу энергии от источника 15 через управляющее устройство 16.
Функционирование модуля происходит следующим образом.
При подаче питания на нагревающий элемент 6 повышается температура микропористого сорбента 5, что приводит к выделению абсорбата, например фреона, во внутренний объем аккумулятора 1. Отсюда он по соединительной трубке 3 через распределитель 4 поступает в камеру 2, заставляя ее расширяться в поперечном направлении и сокращаться в продольном. При этом край 11 камеры смещается влево, сообщая через тягу 12 перемещение рабочему органу 13. Для приведения камеры 2 в исходное состояние энергия подается на охлаждающий элемент 7, который снижает температуру сорбента 5. При этом происходят абсорбция рабочего тела и снижение давления в аккумуляторе 1 и камере 2, после чего эластичная оболочка камеры возвращается в исходное состояние.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль робота | 1986 |
|
SU1333565A1 |
| Модуль робота | 1986 |
|
SU1414619A2 |
| ТЕРМОРЕГУЛИРУЕМЫЙ КОНТЕЙНЕР | 2011 |
|
RU2560350C2 |
| СИСТЕМА И ВАКУУМНЫЙ ЦЕНТРОБЕЖНЫЙ ДИСТИЛЛЯТОР ДЛЯ РЕГЕНЕРАЦИИ ВОДЫ ИЗ МОЧИ НА БОРТУ КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2127627C1 |
| УСТАНОВКА ДЛЯ ОЧИСТКИ ВЫХЛОПА ДВИГАТЕЛЯ, РАБОТАЮЩЕГО НА ХИМИЧЕСКОМ ТОПЛИВЕ | 1992 |
|
RU2031389C1 |
| Теплоаккумулирующий модуль-теплообменник | 2022 |
|
RU2791245C1 |
| АЭРОЗОЛЬ-ГЕНЕРИРУЮЩЕЕ УСТРОЙСТВО, СПОСОБ НАНЕСЕНИЯ МЯГКОГО ЭЛАСТИЧНОГО ПОКРЫТИЯ (ВАРИАНТЫ), АЭРОЗОЛЬ-ГЕНЕРИРУЮЩАЯ СИСТЕМА И КОМПЛЕКТ | 2020 |
|
RU2827948C2 |
| СПОСОБ ДИСТИЛЛЯЦИИ ОДНОРОДНЫХ ЖИДКОСТЕЙ И РАЗДЕЛЕНИЯ СМЕСЕЙ ЖИДКОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2408539C2 |
| Искусственная мышца | 1989 |
|
SU1710331A2 |
| КОРПУС УСТРОЙСТВА ДЛЯ НАГРЕВА АЭРОЗОЛИЗИРУЕМОГО МАТЕРИАЛА, УСТРОЙСТВО ДЛЯ НАГРЕВА АЭРОЗОЛИЗИРУЕМОГО МАТЕРИАЛА И СПОСОБ СБОРКИ КОРПУСА УСТРОЙСТВА ДЛЯ НАГРЕВА АЭРОЗОЛИЗИРУЕМОГО МАТЕРИАЛА | 2019 |
|
RU2823987C2 |
Использование: в робототехнике, а также медицинской технике при протезировании. В модуле манипулятора, принцип действия которого основан на поглощении и выделении газообразного адсорбента, например фреона микропористым сорбентом 5, с целью повышения надежности и быстродействия последний вынесен из рабочей эластичной камеры 2 в отдельный аккумулятор 1 давления рабочего тела. Аккумулятор 1 связан с камерой 2 через распределитель 4 рабочего тела посредством трубки 3. Нагрев и охлаждение сорбента 5 производятся при помощи элементов 6, 7, питание которых осуществляется от источника 15 через управляющее устройство 16. 2 з.п.ф-лы, 1 ил.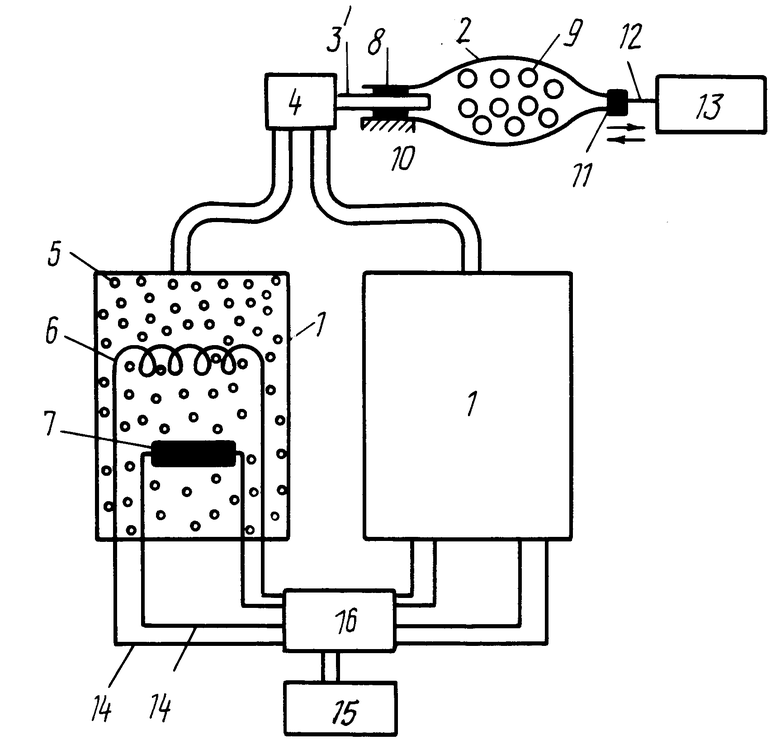
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Модуль робота | 1986 |
|
SU1414619A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
