4-,
а: 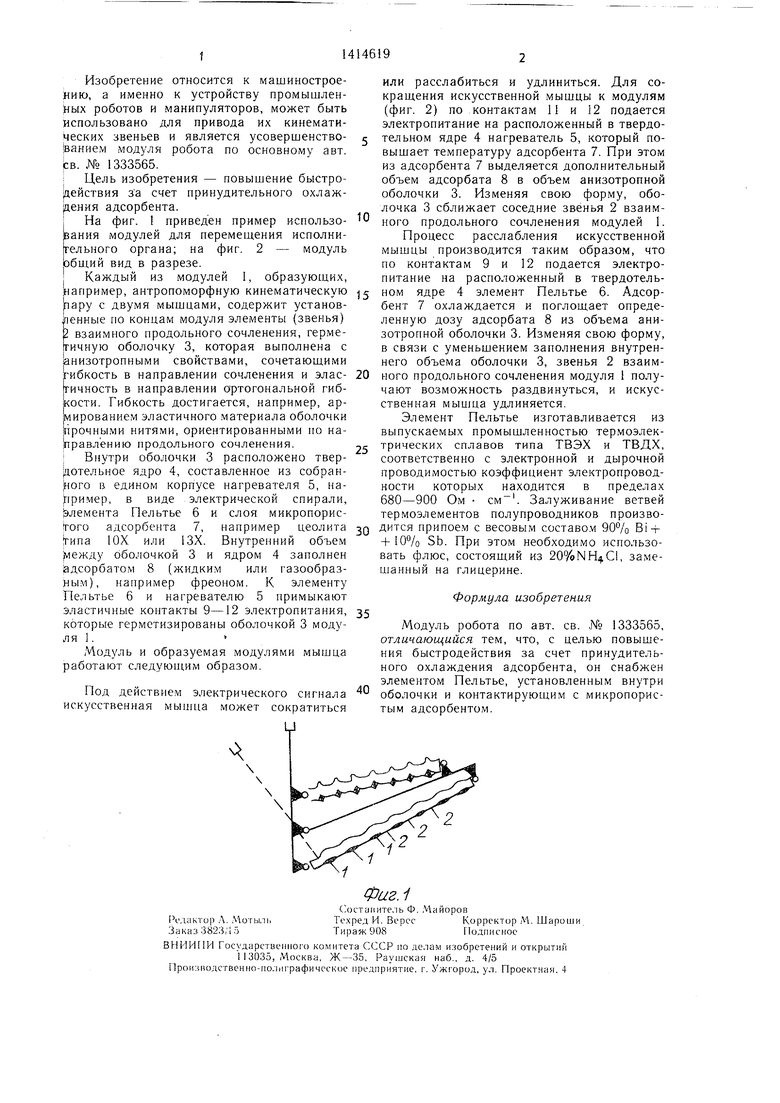
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль робота | 1986 |
|
SU1333565A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2022773C1 |
| Искусственная мышца | 1988 |
|
SU1609644A1 |
| Искусственная мышца | 1989 |
|
SU1710331A2 |
| Искусственная мышца | 1989 |
|
SU1645131A1 |
| Шарнирный узел руки робота | 1987 |
|
SU1465317A1 |
| Привод поворота кинематических звеньев | 1990 |
|
SU1757865A1 |
| Искусственная мышца | 1989 |
|
SU1722808A1 |
| Искусственная мышца | 1988 |
|
SU1526983A1 |
| Система привода сустава робота на электронных мышцах | 1991 |
|
SU1815208A1 |
Изобретение относится к машиностроению, а именно к устройствам промышленных роботов и манипуляторов и может быть использовано для привода из кинематических звеньев. Целью изобретения является повышение быстродействия за счет принудительного охлаждения адсорбента. Внутри оболочки 3 модуля расположено твердотельное ядро 4, составленное из нагревателя 5, охлаждаюш,его элемента Пельтье 6 и слоя микропористого адсорбента 7, например цеолита. Внутренний объем между оболочкой 3 и ядром 4 заполнен адсорбентом 8 (жидким или газообразным), например фреоном. К элементу Пельтье 6 и нагревателю 5 прим.ыкают эластичные контакты электропитания 9, 10, 11, 12, которые герметизированы оболочкой 3 модуля. При работе нагревателя 5 искусственная мышца сокращает ся за счет десорбции адсорбата из адсорбента. При работе охлаждающего элемента Пельтье искусственная мышца удлиняется за счет погло- шения адсорбата адсорбентом. 2 ил. а С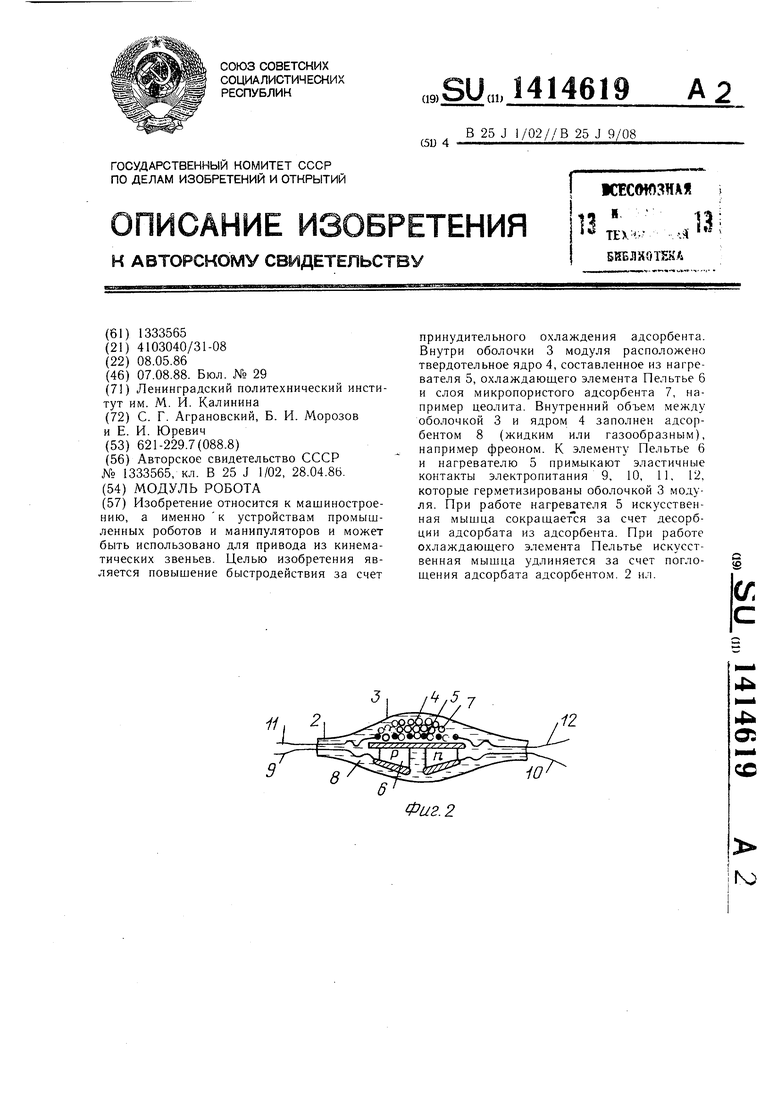
Фиг. 2
Изобретение относится к машиностроению, а именно к устройству промышленных роботов и манипуляторов, может быть использовано для привода их кинематических звеньев и является усовершенство- 1ванием модуля робота по основному авт. Ь. № 1333565.
; Цель изобретения - повышение быстро- |действия з а счет принудительного охлаж- |дения адсорбента.
I На фиг. 1 приведен пример использо- Ьания модулей для перемеш,ения исполни- пгельного органа; на фиг. 2 - модуль общий вид в разрезе.
I Каждый из модулей 1, образующих, например, антропоморфную кинематическую hapy с двумя мышцами, содержит установ- Ьенные по концам модуля элементы (звенья) и взаимного продольного сочленения, герметичную оболочку 3, которая выполнена с Ьнизотропными свойствами, сочетающими гибкость в направлении сочленения и элас- ричность в направлении ортогональной гибкости. Гибкость достигается, например, армированием эластичного материала оболочки прочными нитями, ориентированными по на- Ьравлению продольного сочленения. Внутри оболочки 3 расположено твер- |дотельное ядро 4, составленное из собран- Иого в едином корпусе нагревателя 5, на- ) фимер, в виде электрической спирали, |элемента Пельтье 6 и слоя микропорис- troro адсорбента 7, например цеолита гипа 10Х или 13Х. Внутренний объем между оболочкой 3 и ядром 4 заполнен адсорбатом 8 (жидким или газообразным), например фреоном. К элементу Пельтье 6 и нагревателю 5 примыкают эластичные контакты 9-12 электропитания, которые герметизированы оболочкой 3 модуля 1.
Модуль и образуемая модулями мышца работают следующим образом.
Под действием электрического сигнала искусственная мыища может сократиться
0
0 о 5
-
5
или расслабиться и удлиниться. Для сокращения искусственной мышцы к модулям (фиг. 2) по -Контактам 11 и 1.2 подается электропитание на расположенный в твердотельном ядре 4 нагреватель 5, который повышает температуру адсорбента 7. При этом из адсорбента 7 выделяется дополнительный объем адсорбата 8 в объем анизотропной оболочки 3. Изменяя свою форму, оболочка 3 сближает соседние звенья 2 взаимного продольного сочленения модулей 1.
Процесс расслабления искусственной мышцы производится таким образом, что по контактам 9 и 12 подается электропитание на расположенный в твердотельном ядре 4 элемент Пельтье 6. Адсорбент 7 охлаждается и поглощает определенную дозу адсорбата 8 из объема анизотропной оболочки 3. Изменяя свою форму, в связи с уменьшением заполнения внутреннего объема оболочки 3, звенья 2 взаимного продольного сочленения модуля 1 получают возможность раздвинуться, и искусственная мышца удлиняется.
Элемент Пельтье изготавливается из выпускаемых промышленностью термоэлектрических сплавов типа ТВЭХ и ТВДХ, соответственно с электронной и дырочной проводимостью коэффициент электропроводности которых находится в пределах 680-900 Ом . Залуживание ветвей термоэлементов полупроводников производится припоем с весовым составом 90% Bi + + 10% Sb. При этом необходимо использовать флюс, состоящий из 20%NH4CI, замешанный на глицерине.
Формула изобретения
Модуль робота по авт. св. .№ 1333565, отличающийся тем, что, с целью повышения быстродействия за счет принудительного охлаждения адсорбента, он снабжен элементом Пельтье, установленным внутри оболочки и контактирующим с микропористым адсорбентом.
2
| Модуль робота | 1986 |
|
SU1333565A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
