Изобретение, относится к машиностроению,, а именно к устройству промышленных роботов и манипуляторов, и может быть использовано для привода их кинематических звеньев.
Целью изобретения является уменьшение габаритов и повьпиение надеж- ности модуля за счет изменения вида рабочего тела.
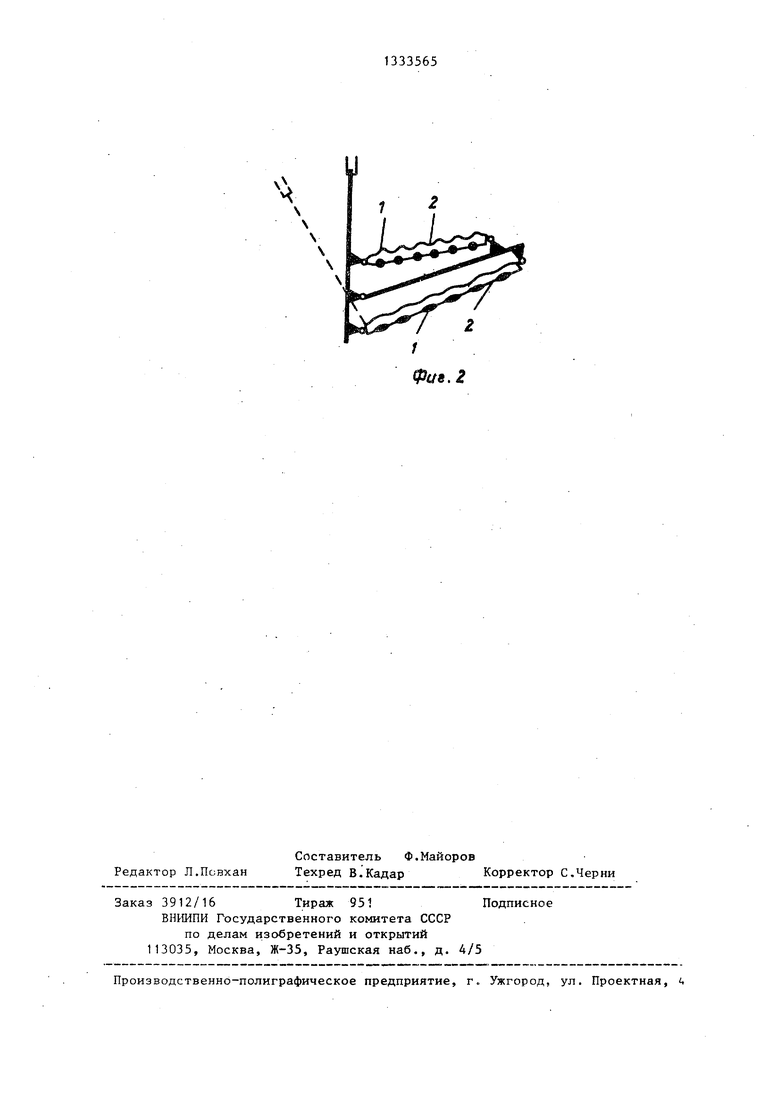
На фиг. 1 изображен модуль, разрез; на фиг. 2 - соединение модулей в приводе перемещения руки робота.
Модуль 1 включает направляющие 2 для взаимного продольного сочленения, оболочку 3j выполненную с анизотропными свойствами, сочетающими гибкость в направлении сочленения и эластичность в направлении, ортогональном гибкости. Анизотропность достигается, например,армированием резины на основе силоксанового каучука нитями стекловолокна, ориентированными в направлении продольной оси модуля. Внутри оболочки 3 расположены микропористый адсорбент 4,например цеолит
типа 10Х или 13Х, охватывающий нагреватель 5, выполненный,например, в виде электрической спирали.Внутренний объем между оболочкой 3 и адсорбентом заполнен адсорбатом б (жидким или газообразным), например водой, пропаном, этиловым спиртом или фреоном, К нагревателю 5 примыкают эластичные контакты 7 и 8 электропитания, которые герметизированы в местах сочленения с оболочкой 3 модуля 1.Модули 1, сочленяясь последовательно,образуют привод перемед1ения, например, руки манипулятора (фиг. 2).Модуль и образуемый модулями привод работают следующим образом.
Под действием управляющего сигнала модуль 1 может перейти в одно из двух устойчивых состояний: либо сократиться,либо наоборот расслабиться и удлиниться„ Для сокращения дли
13335652
ны привода по контактам 7 и 8 подается электропитание на нагреватель 55 который повышает температуру адсор
,, бента 4.При этом из адсорбента 4 выделяется дополнительное количество адсорбата 6 в объем, ограниченный анизотропной оболочкой 3. Изменяя свою форму, оболочка 3 сближает со10 седние направляющие 2 взаимного продольного сочлечения модулей 1. Процесс удлинения модуля 1 производится следующим . С контактов 7 и 8 отключается электропитание.За счет
15 естественного рассеяния тепловой энергии адсорбент 4 охлаждается и поглощает определенную дозу адсорбата 6 из объема, ограниченного анизотропной оболочкой 3. Изменяя свою
20 форму в связи с уменьшением заполнения внутреннего объема оболочки 3 направляющие 2 взаимного продольного сочленения модуля 1 получают возможность раздвинуться и весь привод удлиняется.
30
25
Формула изобретения
К Модуль робота, содержащий оболочку, образующую герметичную камеру, внутри которой расположено рабочее тело, и нагреватель, отличающийся тем,что,с целью уменьщения габаритов и повышения надежности за счет изменения рабоче- 35 го тела, он снабжен расположенным в оболочке микропористым адсорбентом, охватывающим нагреватель,а оболочка вьшолнена армированной гибкими нерастяжимыми нитями, ориентированными в направлении продольной оси модуля,при этом рабочее тело выполнено в виде жидкого или газообразного адсорбата, заполняющего объем между оболочкой и адсорбентом.
2. Модуль по п. I,о т л и ч а- ю щ и и с я тем,что адсорбент выполнен из цеолита.
40
5
Формула изобретения
К Модуль робота, содержащий оболочку, образующую герметичную камеру, внутри которой расположено рабочее тело, и нагреватель, отличающийся тем,что,с целью уменьщения габаритов и повышения надежности за счет изменения рабоче- го тела, он снабжен расположенным в оболочке микропористым адсорбентом, охватывающим нагреватель,а оболочка вьшолнена армированной гибкими нерастяжимыми нитями, ориентированными в направлении продольной оси модуля,при этом рабочее тело выполнено в виде жидкого или газообразного адсорбата, заполняющего объем между оболочкой и адсорбентом.
2. Модуль по п. I,о т л и ч а- ю щ и и с я тем,что адсорбент выполнен из цеолита.
Редактор Л.Повхан
Составитель Ф.Майоров
Техред В.Кадар Корректор С.Черни
Заказ 3912/16 Тираж 951Подписное
ВНРШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, .
Фи8.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль робота | 1986 |
|
SU1414619A2 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2022773C1 |
| Искусственная мышца | 1989 |
|
SU1710331A2 |
| Искусственная мышца | 1988 |
|
SU1526983A1 |
| Искусственная мышца | 1988 |
|
SU1609644A1 |
| Искусственная мышца | 1989 |
|
SU1645131A1 |
| МЕХАНИЧЕСКАЯ МЫШЦА | 1997 |
|
RU2137950C1 |
| Привод поворота кинематических звеньев | 1990 |
|
SU1757865A1 |
| Искусственная мышца | 1989 |
|
SU1722808A1 |
| Модуль робота | 1987 |
|
SU1397277A1 |
Изобретение относится к машиностроению, а именно к устройству промышленных роботов и манипуляторов, и может быть использовано для привода их кинематических .звеньев. Целью изобретения является уменыа&ние габаритов и повьппение надежности модуля за счет изменения вида рабочего тела. Для сокращения длины модуля и образуемого модуля и привода по контактам 7 и 8 подается питание на нагреватель 5, который повышает температуру адсорбента 4. При этом из адсорбента 4 выделяется дополнительное количество адсорбата 6 в объем, ограниченный оболочкой 3, Изменяя свою форму, оболочка 3 сближает соседние направляющие 2 взаимного продольного сочленения модулей 1, При охлаждении адсорбента 4 происходит поглощение части адсорбата 6 и модуль удлиняется. 1 з.п, ф-лы,2 ил. с S (Л 8 . 2 7 СО 00 СО СП (3D сл ф4/г./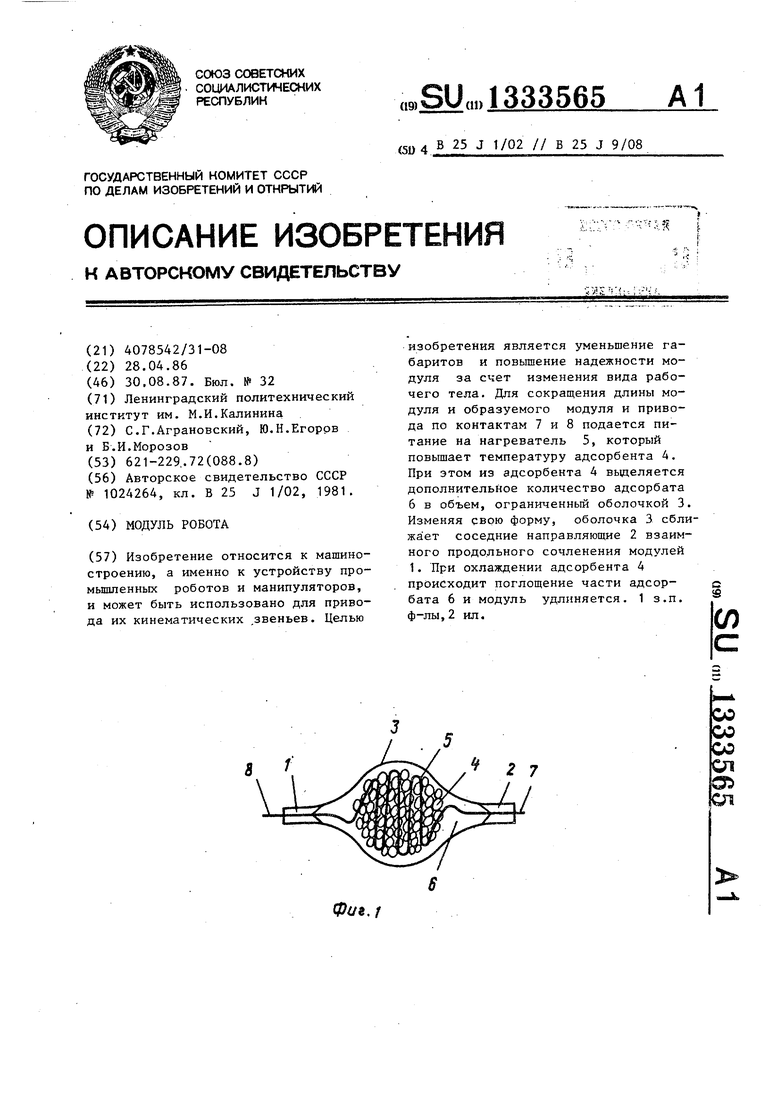
| Манипулятор Тенгиза | 1981 |
|
SU1024264A1 |
