Изобретение относится к автоматике, а именно к вычислительной технике, и может быть использовано в отраслях народного хозяйства, использующих конвейерное производство.
Известно устройство для счета яиц, переносимых конвейером, содержащее сканирующую штангу, емкостной датчик и колебательный контур, обеспечивающее подсчет неупорядоченно движущихся по конвейеру яиц [1].
Недостатком известного устройства является низкая точность счета, ненадежность работы, так как за счет сканирования штанги часть яиц проходит по конвейеру, не попадая в зону счета или попадая в зону дважды. Согласовать скорости конвейера и вращение штанги практически невозможно из-за неупорядоченного расположения яиц на конвейере. К тому же на ленте возможны "завалы", наползание одного яйца на другие, пыль, которая неблагоприятно воздействует на характеристики емкостного датчика.
Наиболее близким из известных является устройство для счета предметов, переносимых конвейером, которое содержит подвижно укрепленный на корпусе вертикальный рычаг, в верхней части которого укреплен флажок, расположенный в зоне взаимодействия с бесконтактным выключателем, в нижней части вертикального рычага укреплен щуп, расположенный в зоне взаимодействия предметов, переносимых конвейером [2].
Данное устройство выбрано в качестве прототипа. Недостатком устройства является невозможность счета предметов, движущихся по конвейеру неупорядоченно.
Целью изобретения является расширение функциональных возможностей за счет обеспечения счета неупорядоченно движущихся предметов.
На фиг. 1 приведена функциональная схема устройства; на фиг. 2 - функциональная схема маятникового датчика; на фиг. 3 - схема подключения фотодатчиков и функциональная схема блока считывания; на фиг. 4 - схема алгоритма предметов, переносимых конвейером.
Устройство (фиг. 1) для счета предметов 1, переносимых конвейером 2, содержит первый, второй, третий и четвертый маятниковые датчики 31-34, установленные над конвейером 2 на станине 4. Маятниковые датчики 31-34 имеют рычаги 51-54, нижние части которых опущены над поверхностью конвейера на величину, меньшую, чем вертикальный размер подсчитываемых предметов 1. Нижние части рычагов 51-54 расположены также в зазорах между двумя боковыми 61-62 и тремя средними 7, 8, 9 направляющими. Все направляющие соединены между собой жестко с помощью планки 10, на которой укреплены оси 11, установленные в подшипниках двух неподвижных кронштейнов 12. На боковых направляющих 61-62 укреплены неподвижно виброколеса 13, представляющие собой эксцентрично закрепленные на осях круги. Электрические выводы маятниковых датчиков 31-34 подключены к блоку считывания 14.
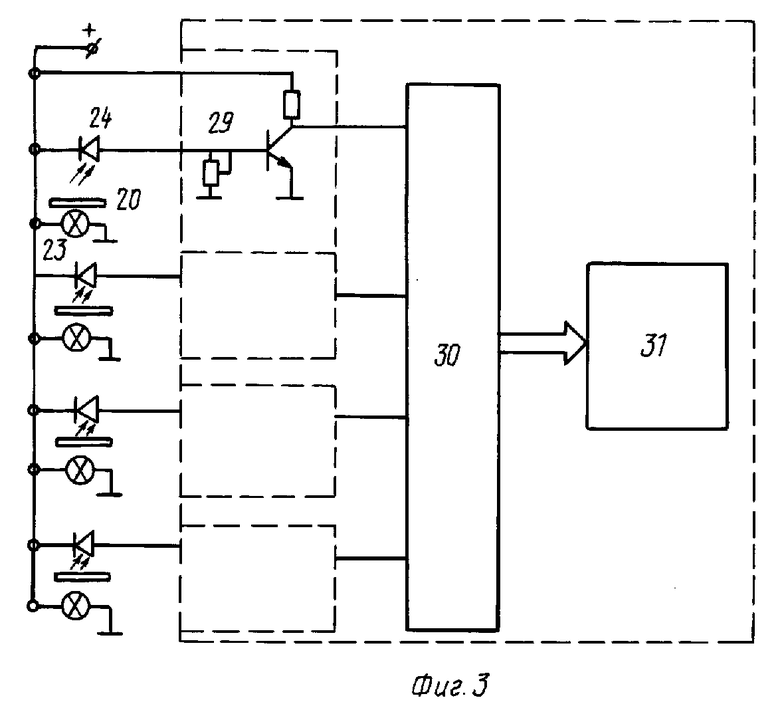
Маятниковый датчик, например, 31 (фиг. 2) содержит передний кронштейн 15 с овальным отверстием, поперечную ось 16, установленную в подшипниках 17 центрального кронштейна 18. На поперечной оси 16 с помощью муфты 19 укреплен рычаг 51. В верхней части рычага 51 установлены флажок 20 и противовес 21. В зоне колебания верхней части рычага 5 установлен фотодатчик, который состоит из кронштейна фотодатчика 22, лампы 23 и фотодиода 24. В месте выхода рычага 51 из овального отверстия переднего кронштейна 15 установлена эластичная манжета 25. Все кронштейны маятникового датчика 31 укрепляются на корпусе 26, на поверхности которого приклеена прокладка 27. Маятниковый датчик 31 закрыт кожухом 28.
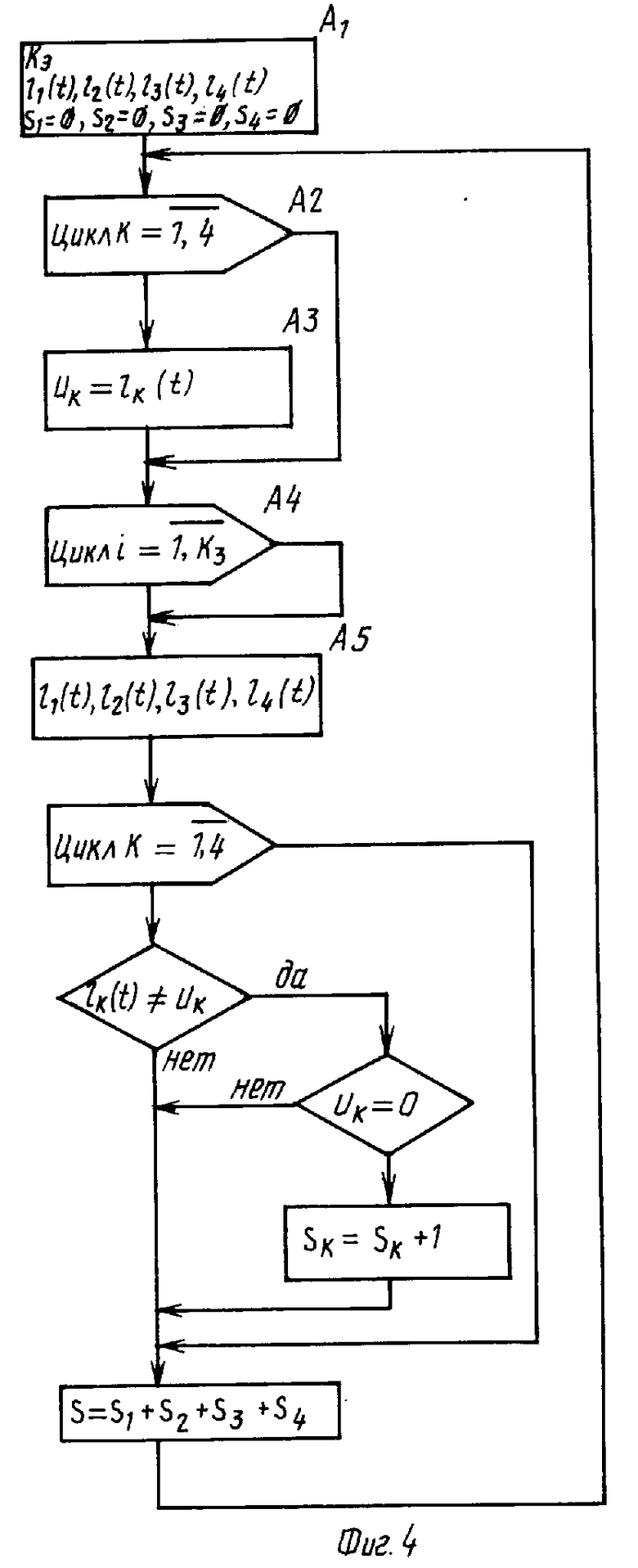
Блок считывания 14 (фиг. 3) состоит из четырех первичных преобразователей 29, ко входам которых подключены выходы маятниковых датчиков 31-34, блок сопряжения 20 и блок 31 регистрации. Устройство работает следующим образом.
За счет движения ленты в направлении предметы 1 движутся неупорядоченно по конвейеру 2. Достигнув направляющих 6-9, предметы разделяются на потоки, в которых уже движутся упорядоченно. Предметы задевают нижнюю часть рычагов 5, которые отклоняются, и флажки 20, установленные в верхних частях рычагов 5, попадают в зазор фотодатчиков, перекрывают попадение света на фотодиод 24 от лампы 23, в результате чего на выходе первичного преобразователя 29 формируется высокий потенциал, который через устройство сопряжения 30 попадает в буфер микроЭВМ 31. После прохождения предмета под нижней частью рычага 5, рычаг отклоняет в исходное состояние флажок 20, выходит из зазора фотодатчика. Фотодиод 24 вновь освещается лампой 23 и на выходе первичного преобразователя 29 появляется низкий потенциал. В микроЭВМ 31 программа анализирует перепады потенциалов и подсчитывает число пройденных предметов.
Алгоритм работы программы, реализованной на микроЭВМ 31, приведен на фиг. 4. Исходными данными для алгоритма являются коэффициент задержки К3, величины сигналов l1(t), l2(t), l3(t), l4(t), поступающих с блока сопряжения, и начальные значения сумм S1, S2, S3, S4. Сигналы l1(t), l2(t), l3(t), l4(t) в результате работы в ключевом режиме первичного преобразователя 29 могут иметь значения либо ноль, либо другое постоянное значение, причем для каждого маятникового датчика это значение может быть своим. Первоначально величины измеренных значений l1(t), l2(t), l3(t) и l4(t) записываются в ОЗУ микроЭВМ 31 (блоки А1, А3). Далее производится цикл А4, задерживающий следующие поступления измеряемых значений сигналов. После поступления новых измеряемых значений А5, проводится их сравнение с данными в ОЗУ. Если сигналы не изменились или предыдущие сигналы не были нулевыми, то значения сумм Si (i = 1,4) не меняется, в противном случае соответствующая сумма увеличивается на единицу. После этого подсчитывается общая сумма предметов (блок А9). После этого алгоритма повторяется.
С целью предотвращения завалов, когда два предмета запирают зазор между направляющими, в устройстве предусмотрены вертикальные колебания всех направляющих, которые обеспечиваются креплением блока направляющих в подвижных осях 11 и виброколесами 13, установленными на боковых направляющих 6 и вращающимися за счет трения о движущийся конвейер 2. С целью устранения наползания одних предметов на другие концы передних кромок средних направляющих 7, 8, 9 установлены на одной линии, расположенной под острым углом γ к направлению движения конвейера.
С целью предотвращения задержки отдельных предметов, попавших на переднюю кромку средней направляющей, передняя кромка выполнена под острым углом β к плоскости конвейера. С целью уменьшения величины "мертвого хода", когда рычаг 5 возвращается в исходное положение, после прохождения предмета 1 зоны счета нижние части рычагов 5 сделаны под углом α к плоскости конвейера и для балансировки установлен противовес 21 в верхней части рычага.
С целью устранения попадания пыли в фотодатчик маятниковый датчик закрыт кожухом 28 с прокладкой 27, а выходы рычагов 5 из кожуха маятникового датчика 3 закрыты манжетой 25.
Вся механическая часть устройства может быть изготовлена из легкого металла типа алюминия, внутренняя поверхность зазора фотодатчика должна быть зачернена. Манжета 25 может быть выполнена из полиэтилена и укреплена на переднем кронштейне 15 и рычаге 5 с помощью клея или хомутиков. Прокладка может быть выполнена из резины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для счета яиц переносимых конвейером | 1985 |
|
SU1288731A1 |
| СПОСОБ ПОЛУЧЕНИЯ ГРАНУЛИРОВАННОГО ОРГАНИЧЕСКОГО УДОБРЕНИЯ | 1995 |
|
RU2115072C1 |
| Устройство для счета предметов,перено-СиМыХ КОНВЕйЕРОМ | 1979 |
|
SU851433A1 |
| Устройство для счета предметов,переносимых конвейером | 1986 |
|
SU1361596A1 |
| Автоматическая линия для упаковывания ампул | 1987 |
|
SU1521663A1 |
| Устройство для подсчета предметов,переносимых конвейером | 1984 |
|
SU1290380A1 |
| Устройство для подсчета предметов,перемещаемых конвейером | 1986 |
|
SU1383421A2 |
| Устройство для счета яиц,переносимых конвейером | 1984 |
|
SU1257677A1 |
| Устройство для счета предметов,переносимых конвейером | 1985 |
|
SU1305739A1 |
| Устройство для счета предметов,переносимых конвейером | 1984 |
|
SU1228130A1 |
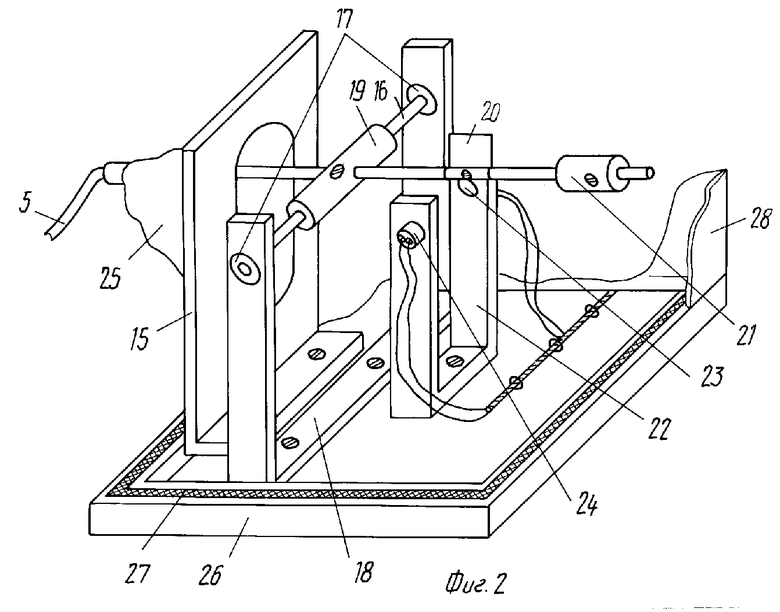
Изобретение относится к автоматике и может быть использовано в отраслях народного хозяйства, использующих конвейерное производство. Цель изобретения - расширение функциональных возможностей устройства для счет обеспечения счета неупорядочно движущихся предметов. Устройство содержит маятниковые датчики, установленные над конвейером 2 на станине 4. Маятниковые датчики имеют рычаги, нижние части которых расположены в зазорах между боковыми и средними 7, 8, 9 направляющими. Все боковые направляющие и средние 7, 8, 9 закреплены жестко с помощью планки 10, на которой укреплены оси 11, установленные на двух неподвижных кронштейнах 12. На боковых направляющих укреплены неподвижно виброколеса 13. Электрические выводы маятниковых датчиков подключены к блоку 14 считывания. В зоне колебания верхней части рычага, например, 5 установлен фотодатчик, в верхней части рычага установлен флажок 20 и противовес 21. 3 з.п.ф-лы, 4 ил.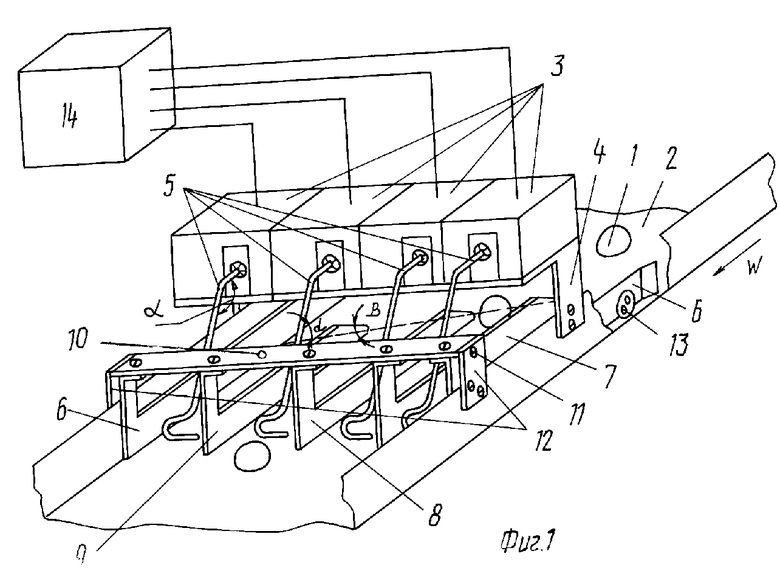
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для счета предметов,переносимых конвейером | 1984 |
|
SU1211778A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
