Изобретение относится к лесозаготовительной технике.
Известно устройство для подъема затонувших бревен со дна реки, содержащее размещенную поперек русла реки ферму мостового крана с опорами, установленными с возможностью перемещения вдоль русла реки посредством приводов, размещенную на ферме мостового крана реверсивную тележку и связанный с ней механизм забора бревен.
Известное устройство имеет низкую производительность.
Целью изобретения является повышение производительности.
Указанная цель достигается тем, что устройство для подъема затонувших бревен со дна реки, содержащее размещенную поперек русла реки ферму мостового крана с опорами установленными с возможностью перемещения вдоль русла реки посредством приводов, размещенную на ферме мостового крана реверсивную тележку и связанный с ней механизм забора бревен, снабжено связанным с тележкой механизмом поворота бревен, а ферма мостового крана выполнена телескопической.
Также устройство снабжено шарнирно закрепленной на тележке поворотной рамой, опорными колесами, связанными с ней, лебедками, связанными с поворотной рамой посредством тросов, и второй тележкой, включающей в себя снабженные тельферами две балки, соединенные с ними упаковочные тросы для бревен и снабженные приводами винтовые механизмы, при этом механизм поворота бревен включает в себя выполненную телескопической поворотную раму, шарнирно закрепленную на первой тележке, снабженные приводами лебедки, размещенные на первой тележке с двух сторон от телескопической поворотной рамы и связанные с ней, тельферы, связанные с телескопической поворотной рамой, жестко прикрепленные к нижней ее части изогнутые зубья для подачи бревен, приводные транспортеры, связанные с нижней частью телескопической поворотной рамы, микропереключатели, включенные в электрическую цепь приводов лебедок и транспортеров, и связанные с телескопической поворотной рамой зацепы, установленные с возможностью взаимодействия с упомянутыми микропереключателями, причем механизм забора бревен включает в себя связанные с поворотной рамой зубья и выполненные с зубчатыми колесами валы, охватывающие зубчатые колеса замкнутые цепи и связанные с замкнутыми цепями изогнутые зубья для перемещения бревен.
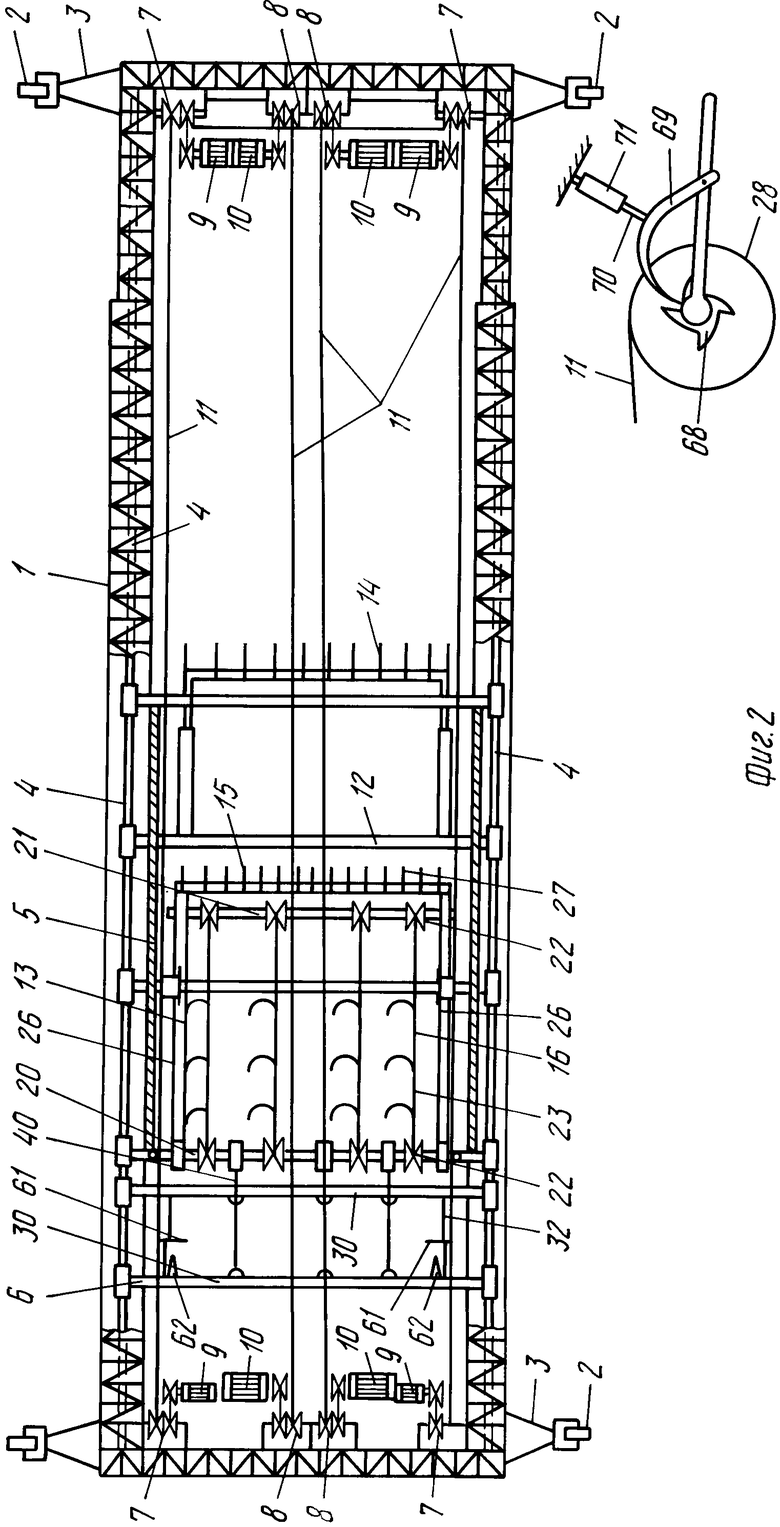
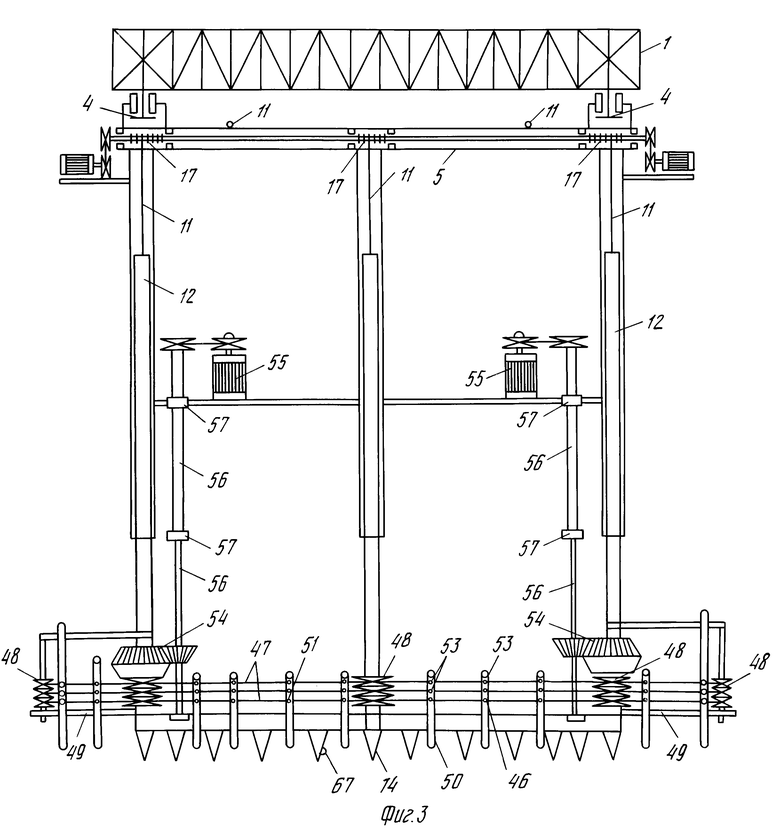
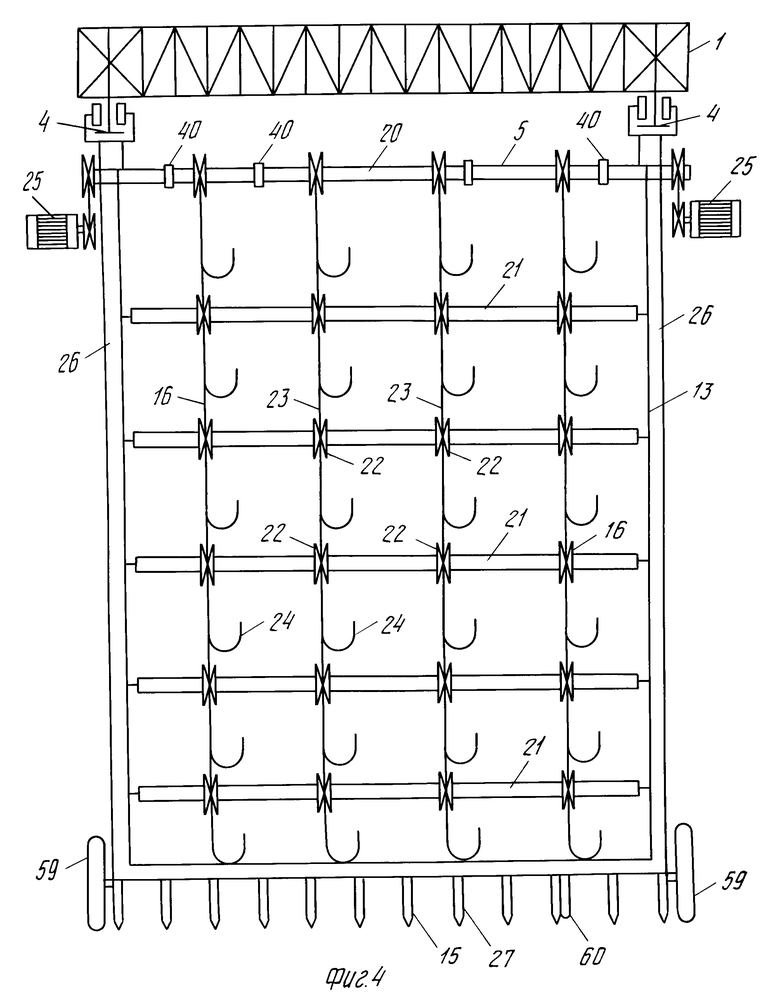
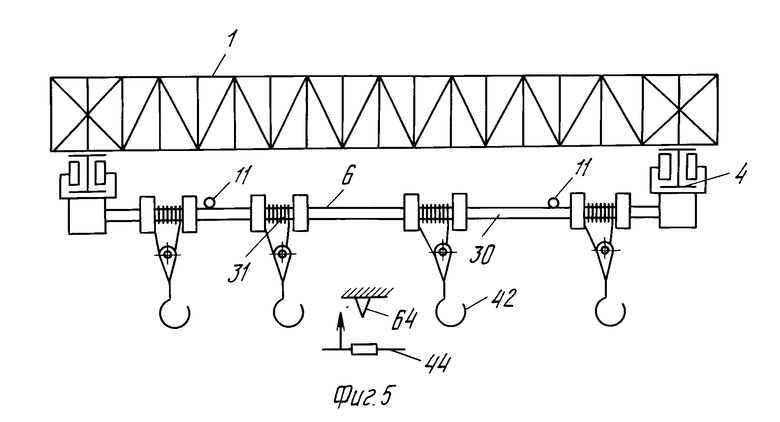
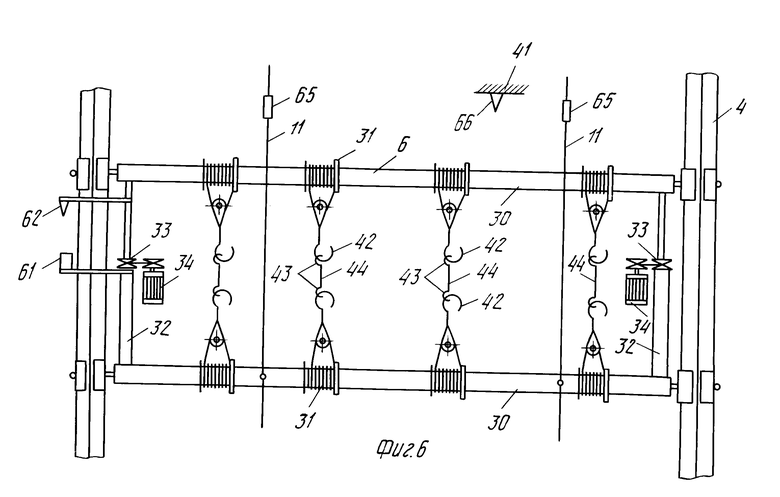
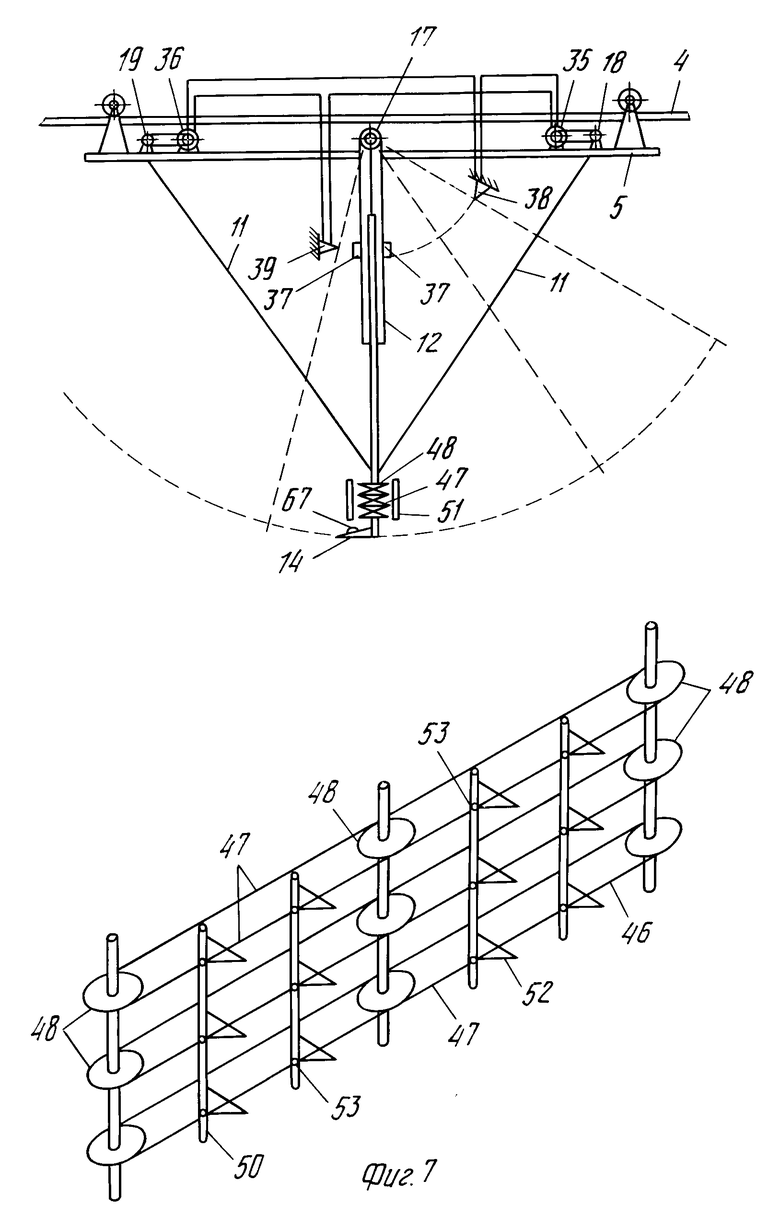
На фиг. 1 изображено устройство для подъема затонувших бревен, вид сбоку, с поворотной телескопической рамой для подбора и подачи бревен на транспортирующий механизм, изображенный в вертикальном положении; на фиг. 2 - то же, вид сверху, телескопическая рама изображена в наклонном положении; на фиг. 3 - тележка с рамой подающего механизма; на фиг. 4 - тележка с подбирающим и транспортирующим механизмами; на фиг. 5 - тележка для накопления, формирования и упаковки бревен, вид сбоку; на фиг. 6 - то же, вид сверху; на фиг. 7 - устройство подающего механизма.
Устройство состоит из решетчатой телескопической фермы 1, опирающейся на самонаправляющиеся колеса 2 при помощи опор 3. Ферма 1 снабжена направляющими 4 и тележками 5 и 6. Ферма 1 представляет собой стержневую несущую конструкцию, выполненную, например, из уголков и имеющую форму балочного типа. Механизм передвижения тележек 5 и 6 включает в себя лебедки 7 и 8, снабженные электрическими двигателями 9 и 10 и тросами 11. На передней тележке 5 шарнирно закреплены поворотные рамы 12 и 13. Рама 12 выполнена телескопической и содержит в нижнем основании изогнутые зубья 14 слоя захвата, перемещения и подачи затонувших бревен на подбирающий 15 и транспортирующий 16 механизмы. Телескопическая рама 12 снабжена тельферами 17 и тросами 11. Рама 12 соединена с лебедками 18 и 19. Лебедки 18 и 19 расположены по обе стороны от рамы 12 и снабжены тросами 11. Рама 13 снабжена подбирающим 15 и транспортирующим 16 механизмами. На раме 13 шарнирно закреплены ведущий 20 и ведомый 21 валы. На валах 20 и 21 жестко закреплены зубчатые колеса 22. На зубчатые колеса 22 натянуты замкнутые цепи 23, на них жестко закреплены изогнутые зубья 24. Вал 20 снабжен электрическими двигателями 25. На боковых сторонах рамы 13 жестко закреплены щиты 26, предназначенные для предотвращения падения бревен. В нижнем основании рамы 13 жестко закреплены зубья 27 подбирающего механизма 15. Рама 13 соединена с лебедкой 28 при помощи тросов 11. Лебедка 28 снабжена электрическим двигателем 29. Тележка 6 снабжена двумя балками 30, на которых содержатся тельферы 31. Балки 30 соединены между собой при помощи винтовых механизмов 32, содержащих звездочки 33. Звездочки 33 соединены с электрическими двигателями 34. Лебедка 18 снабжена электрическим двигателем 35, а лебедка 19 снабжена электрическим двигателем 36. На раме 12 жестко закреплен зацеп 37, контактирующий с микропереключателями 38 и 39. На раме 13 шарнирно закреплены наклонные направляющие 40, опирающиеся на балку 41. Направляющие 40 предназначены для подачи бревен из транспортирующего механизма 16 на тележку 6. На балках 30 тележки 6 на тельферах 31 при помощи крючков 42 и колец 43 подвешены упаковочные тросы 44, предназначенные для упаковки штабеля бревен. Устройство снабжено кабиной 45 и дистанционным управлением. Рама 12 снабжена транспортером 46, предназначенным для перемещения бревен в горизонтальной плоскости, если концы бревен расположены за пределами подбирающего 15 и транспортирующего 16 механизмов рамы 13. Транспортер 46 выполнен из трех и более цепей 47, натянутых на звездочки 48. Звездочки 48 шарнирно закреплены на раме 12 и кронштейне 49. На цепи 47 жестко закреплены металлические захваты 50 для бревен. Захваты 50 выполнены из металлических реек 51, снабженных зубьями 52. Рейки 51 жестко прикреплены к цепи 47 при помощи болтов 53. Транспортер 46 снабжен коническими передачами 54. Коническая передача 54 соединена с электрическим двигателем 55 при помощи телескопического трубчатого вала 56. Вал 56н в поперечном сечении выполнен в форме овала или треугольника, или четырехугольника. Каждый телескопический вал 56 шарнирно прикреплен при помощи шарикоподшипников 57 к раме 12. На ферме 1 установлена электрическая станция 58, обеспечивающая все электрические двигатели электрической энергией. Рама 13 снабжена ходовыми колесами 59, которые расположены в нижнем основании. В нижнем основании рамы 12 на зубьях 27 расположен микропереключатель 60. Микропереключатель 60 контактирует с бревнами. Микропереключатель 60 соединен с электрическими двигателями 9, 36 и 55 при помощи электрической цепи. На балках 30 расположен зацеп 61, контактирующий с микропереключателем 62. На направляющих 4 установлены микропереключатели 63, которые контактируют с зацепом тележки 6. Микропереключатель 63 соединен с электрическим двигателем 10 при помощи электрической цепи. Тросы 44 контактируют с микропереключателем 64. Микропереключатель 64 соединен с электрическими двигателями 10 и 34. На тросах 11 установлены микропереключатели 65, контактирующие с балками 30 тележки 6. Микропереключатель 65 соединен с электрическим двигателем 34. Микропереключатель 66 расположен на балке 41 и контактирует с тележкой 6. Микропереключатель 66 соединен с электрическим двигателем 10 при помощи электрической цепи. На зубьях 14 установлен микропереключатель 67. Микропереключатель 67 соединен с электрическими двигателями 25, 36 и 55 при помощи электрической цепи. Лебедки 7, 8 и 28 снабжены храповым механизмом 68. Собачка 69 храпового механизма 68 соединена со штоком 70 соленоида 71 (фиг. 2). Рама 13 контактирует с микропереключателем 72. Микропереключатель 72 соединен с электрическим двигателем 29 при помощи электрической цепи. Телескопическая ферма 1 снабжена лебедкой 73. Лебедка 73 соединена с торцевыми концами фермы 1 при помощи тросов 11, причем тросы 11 расположены внутри фермы 1. Лебедка 73 снабжена электрическим двигателем 74.
Устройство работает следующим образом.
При помощи вертолета (не показан) производится монтаж устройства. При этом ферму 1 располагают перпендикулярно течению реки, монтируют опоры 3 на берегах реки и устанавливают тележки 5 и 6 на направляющие 4. Рама 13 находится в наклонном положении. В кабине 45 в пульте управления замыкается электрическая цепь, питающая электрический двигатель 9 лебедки 7. Электрический двигатель 9 вращает лебедку 7. Лебедка 7 в одном конце разматывает трос 11, в другом наматывает, при этом при помощи троса 11 тележка 5 перемещается вперед. При перемещении тележки 5 опорные колеса 59 перемещаются по дну реки, а зубья 27 подбирающего механизма 15, перемещаясь по дну реки, упираются в затонувшие бревна, при этом микропереключатель 60 размыкает электрическую цепь, питающую электрический двигатель 9, и замыкает электрическую цепь, питающую электрические двигатели 36 и 55. При этом электрический двигатель 9 прекращает вращать лебедку 7 и она при помощи собачки 69 и храпового механизма 68 фиксируется, а электрический двигатель 36 вращает лебедку 19. Лебедка 19 при помощи тросов 11 перемещает раму 12 вперед, а электрические двигатели 55 вращают конические передачи 54 при помощи телескопического трубчатого вала 56. Коническая передача 54 приводит во вращательное движение звездочки 48 и цепи 47. Цепи 47 приводят в движение транспортер 46 (зубчатый захват 50). Зубчатым захватом 50 бревна перемещаются в горизонтальной плоскости, если они расположены за пределами рамы 13, а рама 12 поворачивает бревна, если они расположены под разными углами наклона и при помощи зубьев 14 перемещает их на подбирающий механизм 15 и транспортирующий механизм 16. Зубья 24 захватывают бревна (фиг. 1 и 4) и при помощи цепи 23 зубчатых колес 22 и валов 20 и 21 с электрическими двигателями 25 бревна перемещаются через транспортирующий механизм 16 в тележку 6. Замыкают электрическую цепь, питающую электрический двигатель 35. Электрический двигатель 35 вращает лебедку 18. Лебедка 18 перемещает раму 12 вверх, поворачивая ее под определенным углом наклона. Как только рама 12 переместится вверх до микропереключателя 38, последний замыкает другую электрическую цепь, питающую электрический двигатель 55. Электрический двигатель 55 вращает коническую передачу 54 при помощи телескопического трубчатого вала 56 и шарикоподшипников 57. Коническая передача 54 вращает звездочки 48 и цепи 47, захват 50 перемещается в исходное положение. Как только захват 50 переместится до надлежащей точки, бревно будет перемещено транспортером 46 на подбирающий 15 и транспортирующий 16 механизмы. Размыкают электрическую цепь, питающую электрические двигатели 55 и 35, и замыкают электрическую цепь, питающую электрический двигатель 36. При этом электрические двигатели 55 прекращают вращать транспортеры 46, а электрические двигатели 36 вращают лебедку 19. При помощи тросов 11 рама 12 перемещается и поворачивается из наклонного положения в вертикальное. Как только рама 12 переместится до надлежащей точки, она контактирует с микропереключателем 39. Микропереключатель 39 размыкает электрическую цепь, питающую электрический двигатель 36 и замыкает первую электрическую цепь, питающую электрический двигатель 55, при этом электрический двигатель 36 прекращает перемещать раму 12, а электрический двигатель 55 вращает коническую передачу 54 при помощи телескопического трубчатого вала 56. Коническая передача 54 приводит во вращательное движение звездочки 48 и цепи 47. Цепи 47 приводят в движение зубчатый захват 50. Захват 50 при помощи зубьев 52 перемещает бревна на подбирающий 15 и транспортирующий 16 механизмы в горизонтальной плоскости, если бревна расположены за пределами рамы 13, а рама 12 при повороте вокруг горизонтальной оси при помощи зубьев 14 разворачивает бревна, устанавливает их параллельно осевой линии течения реки, если бревна расположены на дне реки под разными углами наклона и перемещает их на подбирающий 15 и транспортирующий 16 механизмы. Далее все технологические операции повторяются. При маятниковом вращении рамы 12 обеспечивается бесперебойная подача затонувших бревен на подбирающий 15 и транспортирующий 16 механизмы, при перемещении осуществляется разворот бревен, а также производится перемещение и установка бревен на подбирающий механизм 15, если их концы расположены за пределами рамы 13. Если подняты все бревна, то давление бревен на микропереключатель 60 исчезает и он, расположенный на зубьях 27, срабатывает и замыкает электрическую цепь, питающую соленоид 71 и электрические двигатели 9, при этом соленоид 71 расфиксирует лебедку 7. Электрические двигатели 9 вращают лебедки 7, которые при помощи тросов 11 перемещают тележку 5 вперед. Как только зубья 14 подбирающего механизма 15 переместятся до бревен, микропереключатель 60 размыкает электрическую цепь, питающую соленоид 71, электрический двигатель 9, и замыкает электрическую цепь, питающую электрический двигатель 36. При этом перемещение тележки 5 прекращается и начинает работать электрический двигатель 36. При помощи лебедки 19 и тросов 11 он перемещает раму 12, которая начинает маятниковое движение вышеописанным способом. Щиты 26 удерживают бревна от случайного падения вниз с транспортирующего механизма 16. Как только бревно переместится до самой верхней точки, оно перекатывается по направляющим 40 на тележку 6 от собственного веса по наклонной плоскости. Как только тележка 6 наполнится бревнами до определенного объема, замыкают электрическую цепь, питающую электрический двигатель 34. Электрический двигатель 34 вращает звездочки 33 и винтовые механизмы 32. Винтовые механизмы 32 перемещаются, в результате чего сокращается расстояние между балками 30. Упаковочные тросы 44 перемещаются вниз, увеличивая объем тележки 6. Как только расстояние между балками 30 сократится до определенных пределов, зацеп 61 контактирует с микропереключателем 62. Микропереключатель 62 размыкает электрическую цепь, питающую электрический двигатель 34. Как только тележка 6 наполнится бревнами, размыкают электрическую цепь, питающую электрические двигатели 55 и 25, и замыкают электрическую цепь, питающую соленоид 71 и электрический двигатель 10. При этом электрический двигатель 10 вращает лебедку 8, которая перемещает тележку 6. Как только тележка 6 переместится до надлежащей точки, она контактирует с микропереключателем 63. Микропереключатель 63 размыкает электрическую цепь, питающую соленоид 71 и электрический двигатель 10, и замыкает электрическую цепь, питающую тельферы 31. При этом электрический двигатель 10 останавливается и прекращает перемещать тележку 6 при помощи лебедки 8 и троса 11. Электрические тельферы 31 перемещают штабель бревен на берег реки. Затем тросами 44 упаковывают штабель бревен и снимают тросы 44 с крючков 42 тележки 6. Штабели бревен оставляют на берегу реки, затем штабели транспортируют на перерабатывающий комбинат при помощи вертолетов или автомобильным транспортом. После этого на балках 30 тележки 6 при помощи крючков 42 и колец 43 подвешивают упаковочные тросы 44. Замыкают электрическую цепь, питающую электрический двигатель тельфера 31. Электрический двигатель тельфера 31 перемещает вверх тросы 44. Как только трос 44 переместится до надлежащей точки, он своим зацепом контактирует с микропереключателем 64. Микропереключатель 64 замыкает другую электрическую цепь, питающую соленоид 71 и электрические двигатели 10 и 34. При этом соленоид 71 расфиксирует храповой механизм 68 лебедки 8. Электрический двигатель 34 вращает звездочку 33 и винтовой механизм 32, перемещает в исходное положение балки 30 и расширяет расстояние между последними, в результате чего уменьшается объем тележки 6. Электрический двигатель 10 вращает лебедку 8, трос 11 перемещает тележку 6 и устанавливается в исходное положение под загрузку бревен. Как только винтовой механизм 32 переместится до надлежащей точки, балки 30 контактируют с микропереключателем 65. Микропереключатель 65 размыкает электрическую цепь, питающую электрические двигатели 34. Как только тележка 6 переместится до рамы 13, она контактирует с микропереключателем 66, расположенным на балке 41. Микропереключатель 66 размыкает электрическую цепь, питающую соленоид 71 и электрический двигатель 10, и замыкает электрическую цепь, питающую электрические двигатели 25 и 55. При этом соленоид 71 расфиксирует храповой механизм 68 лебедки 8. Электрический двигатель 10 прекращает перемещать тележку 6 при помощи троса 11 и лебедки 8, а электрический двигатель 25 вращает вал 20. Вал 20 приводит в поступательное движение цепи 23 при помощи зубчатых колес 22. Транспортер 46 производит погрузку бревен со дна реки. Электрический двигатель 55 вращает коническую передачу 54 при помощи вала 56 и шарикоподшипников 57. Коническая передача 54 вращает звездочки 48 и цепи 47. Цепи при помощи захвата 50, зубьев 14 и рамы 12 перемещают концы бревен на подбирающий 15 и транспортирующий 16 механизмы. Когда тележка 5 переместится с одного берега реки на другой и будут подняты со дна реки все бревна, расположенные в зоне захвата данного устройства, производится перемещение устройства на другую позицию при помощи двух тракторов (бульдозеров на гусеничном ходу). Предварительно бульдозеры, один на одной стороне, другой на другой стороне, производят выравнивание профиля дороги для прохода колес 2 устройства, затем перемещают устройство вдоль течения реки на расстояние ширины его захвата. При перемещении устройства на некоторых участках ширина реки может быть больше, чем длина фермы 1. В этом случае крепят трос 11 за ферму 1 с двух сторон и при помощи тракторов тянут устройство в стороны перпендикулярно течению реки, при этом самонаправляющиеся колеса разворачиваются на шарнирах вокруг вертикальной оси на 90о, а внутренняя телескопическая ферма 1 перемещается по направляющим относительно наружной фермы на определенное расстояние. Длина фермы 1 увеличивается до требуемых размеров. Затем производят перемещение устройства на другую позицию при помощи тракторов и тросов по направлению течения реки. Если ширина реки вновь уменьшается, то производят замыкание электрической цепи, питающей электрические двигатели 74. Электрические двигатели 74 вращают лебедки 73. Лебедки 73 наматывают тросы 11 и под действием усилия лебедок телескопические фермы сдвигаются по своим направляющим. При этом длина фермы 1 сокращается до требуемых размеров.
Замыкают электрическую цепь, питающую соленоид 71. В соленоиде возникает магнитное поле и шток 70 перемещает собачку 69 и расфиксирует храповой механизм 68 лебедки 28. По мере углубления дна реки рама 13 от собственного веса поворачивается вокруг оси и перемещается вниз. Ходовые колеса 59 перемещаются по дну реки, удерживают раму 13 в требуемом положении. Как только рама 13 опустится на большую глубину, а рама 12 не может достать до бревен, замыкают электрическую цепь, питающую электрические двигатели тельфера 17. Тельфер 17 разматывает трос 11 и телескопическая рама 12 от собственного веса перемещается вниз и упирается в грунт, при этом контактируя с микропереключателем 67. Микропереключатель 67 размыкает электрическую цепь, питающую электрический тельфер 17, и замыкает электрическую цепь, питающую электрический двигатель 35. Электрический двигатель 35 вращает лебедку 18 рамы 12 и снова начинается маятниковое движение рамы 12. Далее все технологические операции повторяются. После окончания работы или переезда устройства на другую позицию замыкают электрическую цепь, питающую электрический двигатель 35. Электрический двигатель 35 вращает лебедку 18. На лебедку 18 наматывается трос 11, он перемещает раму 12 вверх на определенную высоту. Затем размыкают электрическую цепь, питающую соленоид 71. В соленоиде 71 магнитное поле исчезает и собачка 69 перемещается вниз, фиксируя храповой механизм 68. Затем замыкают электрическую цепь, питающую электрический двигатель 29. Двигатель 29 вращает лебедку 28. Лебедка 28 при помощи тросов 11 перемещает вверх раму 13. Как только рама 13 переместится вверх на определенную высоту, она контактирует с микропереключателем 72. Микропереключатель 72 размыкает электрическую цепь, питающую электрический двигатель 29. Электрический двигатель 29 прекращает перемещение рамы 13. При этом рама 12 поддерживает раму 13 в подвешенном состоянии.

Использование: в лесозаготовительной технике. Сущность изобретения: устройство для подъема затонувших бревен со дна реки содержит размещенную поперек русла реки и выполненную телескопической ферму мостового крана с опорами, установленными с возможностью перемещения вдоль русла реки посредством приводов, размещенную на ферме мостового крана реверсивную тележку, связанную с ней механизмы забора и поворота бревен и вторую тележку, включающую в себя две балки и соединенные с ним упаковочные тросы для бревен. 1 з. п. ф-лы, 7 ил.
| Устройство для выгрузки лесоматериалов из воды | 1986 |
|
SU1393741A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
