Изобретение относится к подъемно-транспортной технике, а именно к грузозахватным устройствам.
Известно грузозахватное устройство, включающее шарнирно закрепленный, например, на стреле манипулятора поворотный в вертикальной плоскости корпус, челюстной захват и силовые цилиндры смыкания и поворота челюстей вокруг вертикальной оси (авт.св. 361970, кл. B 66 C 1/68, 1979).
Однако известное устройство характеризуется непроизводительными затратами энергии и малыми технологическими возможностями из-за необходимости коррекции положения захвата относительно перемещаемого предмета.
Наиболее близким техническим решением к изобретению является грузозахватное устройство, включающее шарнирно закрепленный на стреле манипулятора поворотный в вертикальной плоскости корпус, установленные параллельно друг другу цилиндры смыкания и подачи челюстного захвата, кронштейн, челюстной захват, тяги которого шарнирно закреплены со штоком цилиндра смыкания [1].
Прототип характеризуется недостаточной надежностью, так как при прямолинейном перемещении захвата необходимо поймать момент ввода в работу цилиндра смыкания челюстного захвата, в противном случае возможны поломки челюстей, кроме того, необходима постоянная коррекция положения захватных челюстей относительно перемещаемого предмета, что приводит к снижению удобства эксплуатации.
Цель изобретения повышение надежности и удобства в эксплуатации.
Это достигается тем, что грузозахватное устройство, включающее шарнирно закрепленный на подъемной машине, преимущественно на стреле манипулятора, поворотный в вертикальной плоскости корпус, челюстной захват, расположенный в корпусе цилиндр подачи челюстного захвата, установленный в цилиндре подачи челюстного захвата цилиндр смыкания челюстного захвата, кронштейн и тяги, шарнирно закрепленные на штоке цилиндра смыкания челюстного захвата и на челюстях челюстного захвата, дополнительно снабжено механизмом вращения челюстного захвата, связанной с ним телескопической направляющей, при этом челюстной захват закреплен на цилиндре его смыкания, цилиндр смыкания челюстного захвата образует с цилиндром подачи челюстного захвата сообщающиеся между собой посредством дросселя камеры, а корпус цилиндра смыкания челюстного захвата выполнен с кронштейном, с которым связана телескопическая направляющая.
Механизм вращения челюстного захвата включает корпус, разделенный на полости перегородками, одна из которых жестко связана с поворотным в вертикальной плоскости корпусом, а другая - с корпусом механизма вращения челюстного захвата.
На фиг. 1 изображено грузозахватное устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Грузозахватное устройство состоит из корпуса 1, в котором концентрично расположен цилиндр подачи челюстного захвата, выполненный в виде подвижной опоры 2, в цилиндре подачи челюстного захвата расположен цилиндр 3 смыкания челюстного захвата, образующий с цилиндром подачи челюстного захвата сообщающиеся между собой посредством дросселя 5 камеры 4 и 6. На корпусе цилиндра 3 смыкания жестко закреплен кронштейн 7. Шток цилиндра смыкания посредством тяг 8 связан с захватными челюстями 9.
На корпусе 1 смонтирован механизм 10 вращения челюстного захвата, включающий корпус, разделенный на полости 11 А и 11 В перегородками 12, одна из которых жестко связана с поворотным в вертикальной плоскости корпусом, а другая - с корпусом механизма вращения челюстного захвата. Грузозахватное устройство закреплено на стрелке 14 манипулятора и поворачивается в вертикальной плоскости цилиндром 15 разворота.
Грузозахватное устройство работает следующим образом.
Манипулируя стрелой 14 и поворачивая в вертикальной плоскости цилиндром 15 разворота грузозахватное устройство наводится на объект захвата. Захватные челюсти 9 находятся в открытом положении. При помощи механизма 10 вращения челюсти занимают необходимое положение, которое меняется благодаря подаче рабочей жидкости в полости 11. Так, при подаче в полость 11 А вращение челюстей происходит по часовой стрелке, а при подаче в полость 11 В - против часовой стрелки. Телескопическая направляющая 13 удерживает захватные челюсти в выбранном положении.
Захватные челюсти подводятся к объекту захвата, когда рабочая жидкость подается в цилиндр подачи, выполненный в виде подвижной опоры 2. Для исключения удара челюстных захватов по объекту захвата и его опрокидывания в грузоподъемном устройстве образована буферная камера 4, размещенная между цилиндром подачи челюстного захвата и цилиндром смыкания челюстного захвата, а также соединенная посредством дросселя 5 с внутренней камерой 6. Так при соприкосновении с объектом захвата дроссель 5 пропускает рабочую жидкость из буферной камеры 4 во внутреннюю камеру 6. Благодаря этому обеспечивается плавность захвата объекта челюстями 9 посредством тяг 8. Установив стрелу 14 в транспортное положение объект захвата перемещается на новое место, где производится раскрытие челюстных захватов 9 в обратной последовательности.
Грузозахватное устройство обеспечивает расширение возможностей устройства за счет увеличения расстояния перемещения челюстного захвата; повышение точности позицирования челюстного захвата за счет возможности вращения захватных челюстей.
Экономический эффект может быть получен за счет расширения технологических возможностей устройства, сокращения трудоемкости и затрат времени при работе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1987 |
|
SU1482880A1 |
| ТРУБЧАТЫЙ АНКЕР И СПОСОБ ЕГО УСТАНОВКИ | 1990 |
|
RU2023881C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1971 |
|
SU320435A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1973 |
|
SU361970A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Грузозахватное устройство | 1976 |
|
SU611855A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |

Использование: изобретение относится к подъемно-транспортной технике. Сущность изобретения: устройство содержит шарнирно закрепленный, например, на стреле манипулятора корпус, внутри которого помещен цилиндр подачи челюстного захвата, выполненный в виде подвижной опоры 2, цилиндр 3 смыкания челюстного захвата, кронштейн 7, тяги 8, шарнирно закрепленные с челюстями и штоком цилиндра смыкания, механизм 10 вращения челюстного захвата. В верхней части подвижной опоры выполнена полость, в которой размещен цилиндр смыкания, а между подвижной опорой и цилиндром смыкания образована буферная камера, сообщающаяся посредством дросселя со штоковой камерой. Телескопическая направляющая 13 соединяет механизм вращения с кронштейном, жестко закрепленным с корпусом цилиндра смыкания. 1 з.п. ф-лы, 2 ил.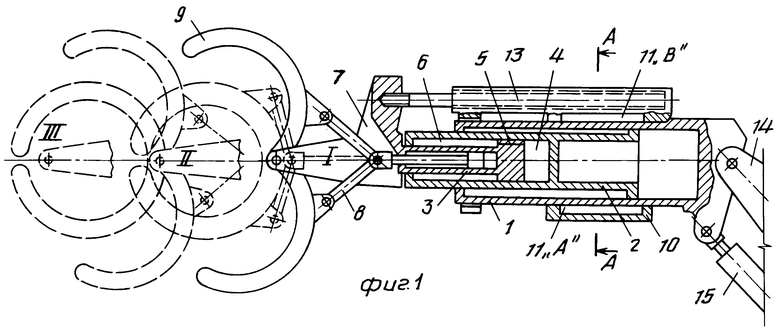
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Грузозахватное устройство | 1987 |
|
SU1482880A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
