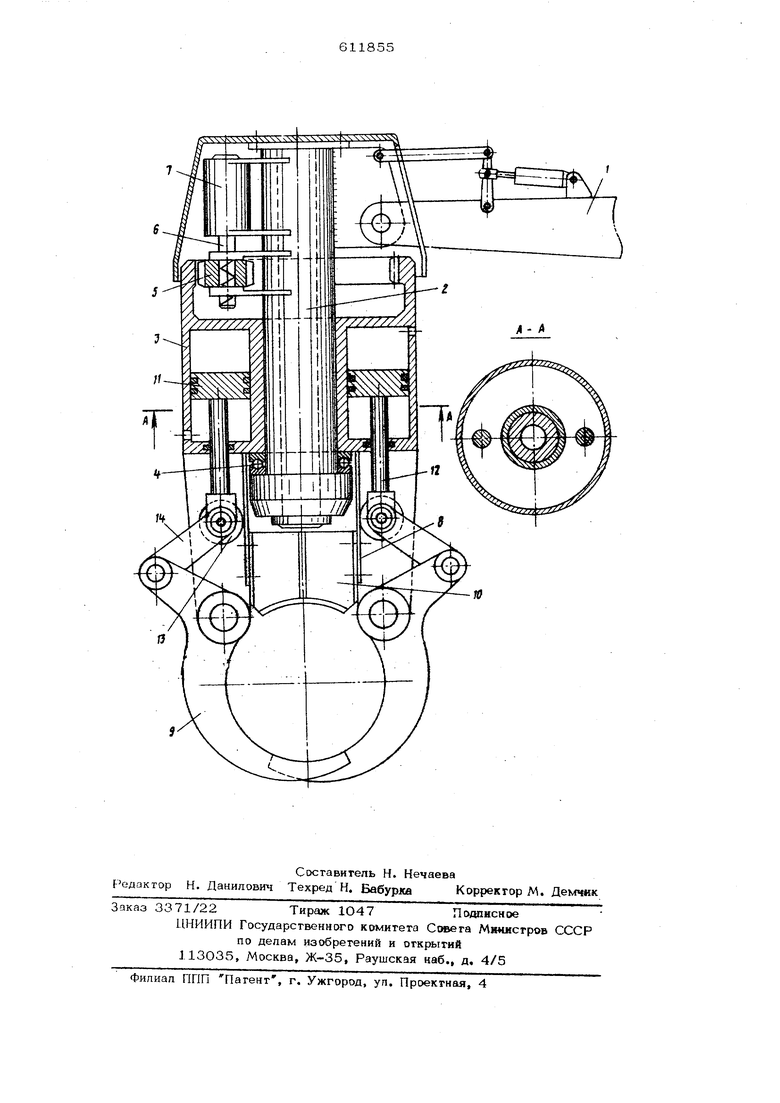
Иэобрегение относится к грузоподъемным устройствам. Извесгны захватные устройства, включаю щие шарнирно соединенные между собой захватные рычаги, управляемые гидроцилиндром, корпус юи-орого шарнирно соединен со стрелой манипулятора, а челюсти имеют возможность поворота вокруг своей оси p.J. Однако это устройство сложно по конст рукции, имеет большой вес и недостаточный /угол вращения захватных рычагов относительно вертикальной оси. Известно также грузозахватное устройство, шарнирно закрепленное на стреле груз подъемной машины, содержащее поворотный вокруг вертикальной оси гидроцилиндр, на корпусе которого шарнирно закреплены захватные рычаги и механизм поворота гидроцилиндра 2J. Однако такое устройство хотя и не имеет ограничения угла поворота захватных рычагове, но конструкция его сложна и надежность в работе низка. Целью изобретения является повышение надежности захвата и упрощение конструкции Это достигается тем, что корпус гидроцилиндра выполнен в виде тора, а поршень гидроципиндра - в виде кольца и снабжен диаметрально, расположенными штоками, сое- диненныг -ш с захватными рычагами и несущими на концах опорные ролики, взаимодействующие с направляющими, жестко прикрепленными к Kopeiycy гидроцилиндра. На чертеже изображено предлагаемое грузозахватное устройство, общий вид, и дано сечение А-А. Грузозахватное устройство содержит шарнирно прикрепленную к стреле 1 пустотелую ось 2, э которую насажен силовой гидроцилиндр 3, корпус которого выполнен в виде тора (объемного кольца); нижнее основание тора опирается на подшипниковый узел 4, и верхнее основание представляет собой зубчатое Колесо с внутренним расположением зуба, которое зацепляется с шестерней 5, расположенной в кронштейнах, . жестко соединенных с осью 2, Осью для шестерни 5 является шток 6 гидроцилиндра 7j на штоке имеется нарезка в виде плавной вииговой
пинии и внутреннее, отверстие шестерни выполнено с ппавной винтовой нарезкой (соединение вин1 гайка, где роль винга выполняет шгок гидроцилиндра, а роль гайки сама щесгернй).
Гидроципиндр 7 тоже на специальных кронштейнах жестко закреплен к неподвижной оси 2. Грузонесущие направляющие кронштейны 8, на которых шарнирно установлены рычаги 9, соединены между собой опорной гр&бенкой 10 и жестко закреплены к нижнему основанию силового.гидроцилиндра 3. Поршень 11 силового гидроцилиндра 3 выполнен в виде кольца, на котором диаметрально расположены два штока 12, концы KOTOрых через .ролики 13 опираются на плоскость кронштейнов 8, которые соответст венно. попарно через тяги 14 соединенны с короткиьш плечами грузозахватных рычагов 9. Грузозахватное устройство работает следующим образом.
Устройство с помощью стрелы 1 направляется на объект груза (на чертеже не показано).,
Кольцеобразный поршень 11 с двумя штоками гидроцилиндра 3, двигаясь вверх, раскрывает рычаги 9 захватного устройства. Включается гидроцилиндр 7. Шток 6, двигаясь вверх или вниз, своей винтовой нарезкой воздействует на шестерню 5 (вращает ее по часовой Стрелке или против). Шестерня, в свою очередь, воздействует на зубчатое колесо, жестко связанное с гильзой силового гидроцилиндра 3, и этим самым ориентирует захватные рычаги 9 относитель но оси объекта груза.
Сориентировав захват относительно объекта, стрела 1 опускает его на объект до полного соприкосновения с гребенкой 1О. После этого поршень 11с двумя штоками 12, двигаясь вверх, зажимает объект рычагами 9.
Зафиксированный груз переносится стрелой 1 грузоподъемного механизма в нужном направлении и челюсти захватного устройства с помощью гидроцилиндра раскрываются, опуская груз; затем цикл повторяется.
При удержании груза рычаг 9 стремится повернуться вокруг оси и изогнуть шток. Для предотвращения деформации штока-имеются опорные ролики 13, которые ;Двигаются по плоскости кронштейнов как по направляющим, воспринимая на себя всю нагрузку.
Формула изобретения
Грузозахватное устройство, шарнирно закрепленное на стреле грузоподъемной машИны, содержащее поворотный вокруг вертикальной оси гидроцилиндр, на кврпусе кото-, рога шарнирно закреплены захватные рычаги и механизм поворота гидроцилиндра, о т л ичаюшееся тем, что, с целью повышения надежности захва та и упрощения конструкции, корпус гидроцилиндра выполнен в виде тора, а его поршень - в виде кольца и снабжен диаметрально расположенными щтоками, сое-, диненными с захватными рычагами и несушими на концах опорные ролики, взаимодейст вующие с направляющими, жестко прикрепленными к корпусу гидроцилиндра.
Источники информации, принятые во внимание при экспертизе;
1.Авторское свидетельство СССР № 320435, М. кл. В 66 С 1/52, 23.05.69.
2.Авторское свидетельство СССР № 361970, М. кл.В 66 С 1/68, 23.05.69,
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 1999 |
|
RU2173270C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Грузоподъемное устройство | 1961 |
|
SU140740A1 |
| УСТРОЙСТВО для ПОДАЧИ ФУТЕРОВочных плитв | 1969 |
|
SU252850A1 |
| Грузозахватное устройство | 1991 |
|
SU1787922A1 |
| Грузозахватная траверса | 1983 |
|
SU1165627A2 |