Изобретение относится к импульсной технике и может быть использовано в системах автоматики и управления.
Известен датчик механических перемещений (Быценко А.В. и др. Датчики и методы повышения их точности. Киев: "Вища школа", 1989, с. 73). Схема этого датчика содержит первичный преобразователь, соединенный с дифференциальным усилителем, амплитудный детектор и усилитель тока, выход которого связан с первичным преобразователем отрицательной обратной связью.
Недостатками этого датчика являются низкая точность, инерционность, сложность, а значит низкая надежность, высокая стоимость, что обусловлено применением устройств для обработки аналогового сигнала и необходимостью прямого наращивания объема схемы для получения сигнала в цифровом коде.
Наиболее близким по технической сущности и достигаемому положительному эффекту к изобретению является датчик механических перемещений, который содержит первичные преобразователи, выполненные в виде Ш-образных сердечников с тремя катушками каждый, одна из которых подключена к тактовому генератору, а две другие - к схеме обработки сигналов, и подвижные элементы, смонтированные с возможностью взаимодействия с магнитным полем первичных преобразователей. Схема обработки сигнала содержит фазовый дискриминатор, два пороговых устройства и интегратор, включенный между входами пороговых устройств и выходом фазового дискриминатора.
Недостатками этого датчика являются низкая точность, инерционность, сложность, а значит низкая надежность, высокая стоимость, что обусловлено применением устройств для обработки аналогового сигнала и необходимостью прямого наращивания объема схемы для получения сигнала в цифровом коде.
Цель изобретения - повышение точности, быстродействие измерений, надежность и снижение стоимости датчика путем определения фазы аддитивной составляющей сигналов первичных преобразователей.
Это достигается тем, что в датчике механических перемещений, содержащем первичные преобразователи, выполненные в виде Ш-образных сердечников с тремя катушками каждый, одна из которых подключена к тактовому генератору, а две другие - к схеме обработки сигналов, и подвижные элементы, смонтированные с возможностью взаимодействия с магнитным полем первичных преобразователей. Схема обработки сигналов содержит интеграторы и стробируемое логическое устройство, выполненное в виде тактируемого дешифратора, вход которого связан с выходами интеграторов, к тактовому генератору подключена центральная катушка, к входам интеграторов - крайние катушки, нагруженные несимметрично и включенные встречно-последовательно.
Указанные отличительные признаки позволяют повысить точность и быстродействие измерений, надежность и снизить стоимость датчика за счет того, что схема обработки сигналов содержит интеграторы и стробируемое логическое устройство, выполненное в виде тактируемого дешифратора, вход которого связан с выходами интеграторов, к тактовому генератору подключена центральная катушка, к входам интеграторов - крайние катушки, нагруженные несимметрично и включенные встречно-последовательно.
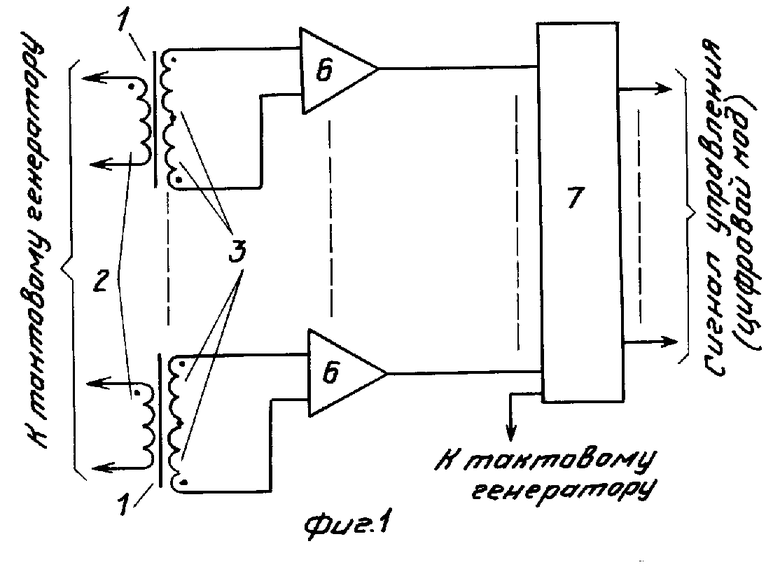
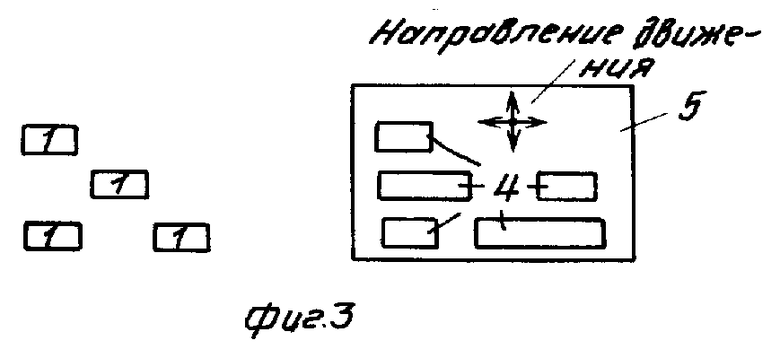
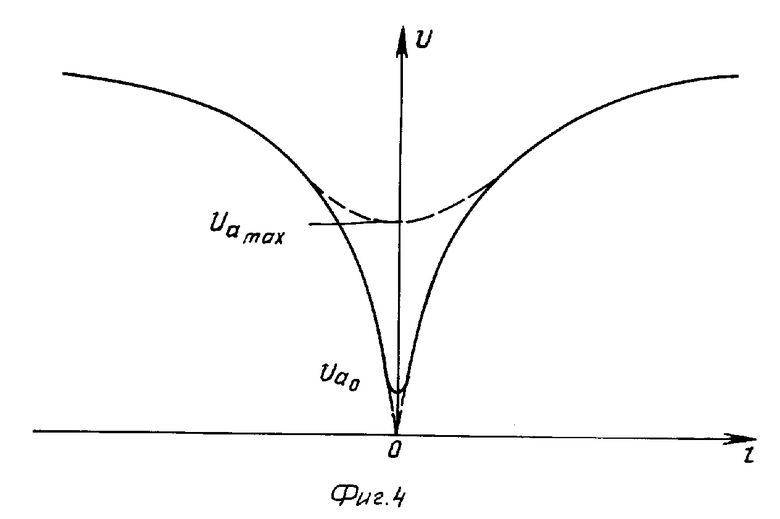
На фиг. 1 приведена структурная схема датчика механических перемещений; на фиг. 2 - первичный преобразователь; на фиг. 3 - возможный вариант размещения первичных преобразователей и подвижных элементов на контролируемом объекте (стрелочкой показаны возможные направления движения объекта); на фиг. 4 - график изменения амплитуды результирующего сигнала на выходе крайних катушек первичных преобразователей.
Датчик механических перемещений содержит тактовый генератор, первичные преобразователи 1, выполненные в виде Ш-образных сердечников с тремя катушками (одной центральной 2 и двумя крайними 3) каждый, подвижные элементы 4, механически связанные с объектом перемещения 5 с возможностью взаимодействия с магнитным полем первичных преобразователей 1, и схему обработки сигналов, которая включает интеграторы 6 и стробируемое логическое устройство 7, выполненное в виде тактируемого дешифратора, вход которого связан с выходами интеграторов 6, входы которых соединены с крайними катушками 3 сердечников, нагруженными несимметрично и включенными встречно-последовательно. Центральная катушка 2 каждого сердечника соединена с тактовым генератором.
Датчик механических перемещений работает следующим образом.
Сигнал с тактового генератора подается на центральные катушки 2 первичных преобразователей 1.
При движении объекта перемещения 5 подвижные элементы 4 изменяют магнитное поле в катушках 3. При этом амплитуда результирующего сигнала, снимаемого с катушек 3, изменяется по закону (см. фиг. 4) и снижается до уровня аддитивной составляющей (уровень Uа) в точке "0" фаза аддитивной составляющей меняет свой знак. Уровень, ниже которого амплитуда результирующего сигнала не опускается, обусловлен величиной аддитивной составляющей.
Минимальная величина аддитивной составляющей Uа зависит от технологических характеристик первичных преобразователей - количества витков катушек, уровня посадки катушек на сердечниках, однородности магнитного материала Ш-образных сердечников и т.д. В точке "0" на фиг. 4 знак фазы аддитивной составляющей изменяется на противоположный, причем с уменьшением общего уровня аддитивной составляющей возрастает скорость изменения фазы, отчего зависит точность датчика.
Результирующий сигнал с крайних катушек 3 подается на входы интеграторов 6, преобразующих синусоидальную форму сигнала в форму, близкую прямоугольной. Крутизна фронта сигналов с интеграторов определяет точность работы устройства.
С интеграторов 6 сигнал поступает на тактируемый дешифратор 7, на выходах которого он изменяется в зависимости от фазового состояния сигнала на его входах, а выходной сигнал представляется в виде цифрового кода, определяющего состояние подвижных элементов относительно Ш-образных сердечников.
Для получения низкой стоимости при невысокой точности повышаются уровень аддитивной составляющей путем предварительного сдвига фаз напряжений в крайних катушках за счет увеличения рассогласования нагрузок. Для получения высокой точности снижают уровень аддитивной составляющей и увеличивают крутизну характеристики интеграторов.
Поскольку в схему обработки сигнала введены интеграторы и стробируемое логическое устройство в виде дешифратора, стало возможным определение фазы аддитивной составляющей сигналов первичных преобразователей и получение сигнала в цифровом коде. По сравнению с устройством, выбранным в качестве прототипа, предложенный датчик механических перемещений имеет более высокие точность и быстродействие, более низкую трудоемкость изготовления, а следовательно, большую надежность и более низкую стоимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Таксометр | 1991 |
|
SU1831650A3 |
| Устройство для контроля прочности образцов брикетов на срез | 1986 |
|
SU1401336A1 |
| Способ поездного сигнализирования и устройство для его осуществления | 2019 |
|
RU2708411C1 |
| Передающее устройство многоканальной телеметрической системы для вращающихся механизмов | 1975 |
|
SU554552A1 |
| Генератор напряжений | 1990 |
|
SU1791956A1 |
| ДАТЧИК СКОРОСТИ | 2006 |
|
RU2327171C2 |
| Кодек блочных кодов | 1987 |
|
SU1473088A1 |
| ПУТЕВОЙ ДАТЧИК ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОСИ КОЛЕСА И СЧЕТА ОСЕЙ | 2000 |
|
RU2206469C2 |
| Вибрационный измеритель реологических характеристик веществ | 1978 |
|
SU777556A1 |
| Устройство для контроля параметровРАдиОТЕХНичЕСКиХ Об'ЕКТОВ | 1978 |
|
SU794616A1 |

Изобретение относится к измерительной технике и может быть использовано при измерении механических перемещений. Цель изобретения - повышение точности и быстродействия измерений. Датчик механических перемещений содержит первичные преобразователи, выполненные в виде Ш-образных сердечников с тремя катушками каждый, одна из которых подключена к тактовому генератору, а две другие - к схеме обработки сигналов, и подвижные элементы, смонтированные с возможностью взаимодействия с магнитным полем первичных преобразователей. Схема обработки сигналов содержит интеграторы и стробируемое логическое устройство, выполненное в виде тактируемого дешифратора, вход которого связан с выходами интеграторов, к тактовому генератору подключена катушка возбуждения к входам интеграторов - измерительные катушки, нагруженные несимметрично и включенные встречно-последовательно. 4 ил.
ДАТЧИК МЕХАНИЧЕСКИХ ПЕРЕМЕЩЕНИЙ, содержащий первичный преобразователь, выполненный в виде Ш-образного сердечника с размещенными на нем катушкой возбуждения и двумя измерительными катушками, тактовый генератор, соединенный с катушкой возбуждения первичного преобразователя, подвижный элемент, установленный с возможностью перемещения относительно катушек первичного преобразователя, и интегратор, отличающийся тем, что, с целью повышения точности и производительности измерений, оно снабжено n - 1 первичными преобразователями, n - 1 интеграторами и тактируемым дешифратором, входы которого соединены с выходами интеграторов, тактовый вход - с выходом тактового генератора, входы интеграторов соединены с выходами соответствующих первичных преобразователей, каждый из которых обмоткой возбуждения соединен с выходом тактового генератора, а его измерительные обмотки включены встречно последовательно.
| Электромеханический датчик импульсов | 1976 |
|
SU604508A3 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
