363538132В
6 ff 2
О
со
со С5
5 722213315
(иё.1
Изобретение относится к иснытательной :технике, а именно к устройствам контроля прочности брикетов, .полученных после прессования.
Целью изобретения является повышение точности.
На фиг. 1 показана общая конструктивная схема устройства; на фиг. 2 - то же, вид сверху; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - электронная блок-схема устройства; на фиг. 6 - электронная схема блока стробирования; на фиг. 7 - электронная схема блока управления.
Устройство содержит камеру для образца (фиг. 1), состоящую из несущей плиты 1 со сменной износостойкой платой 2, направляющих 3 и прижимных роликов 4, расположенных на плите 5 с вращающимися ося.ми 6, прижимаемой с помощью стоек 7 и пружин 8 к брикетной ленте 9. Поскольку стойки 7 жестко соединены с направляющими 3, то плита 5 поджимает прижимными роликами 4 брикетную ленту 9 к плате 2. Камера 1 встроена в разрыв направляющего (охладительного) лотка 10 пресса и имеет с ним общее и одинаковое проходное сечение.
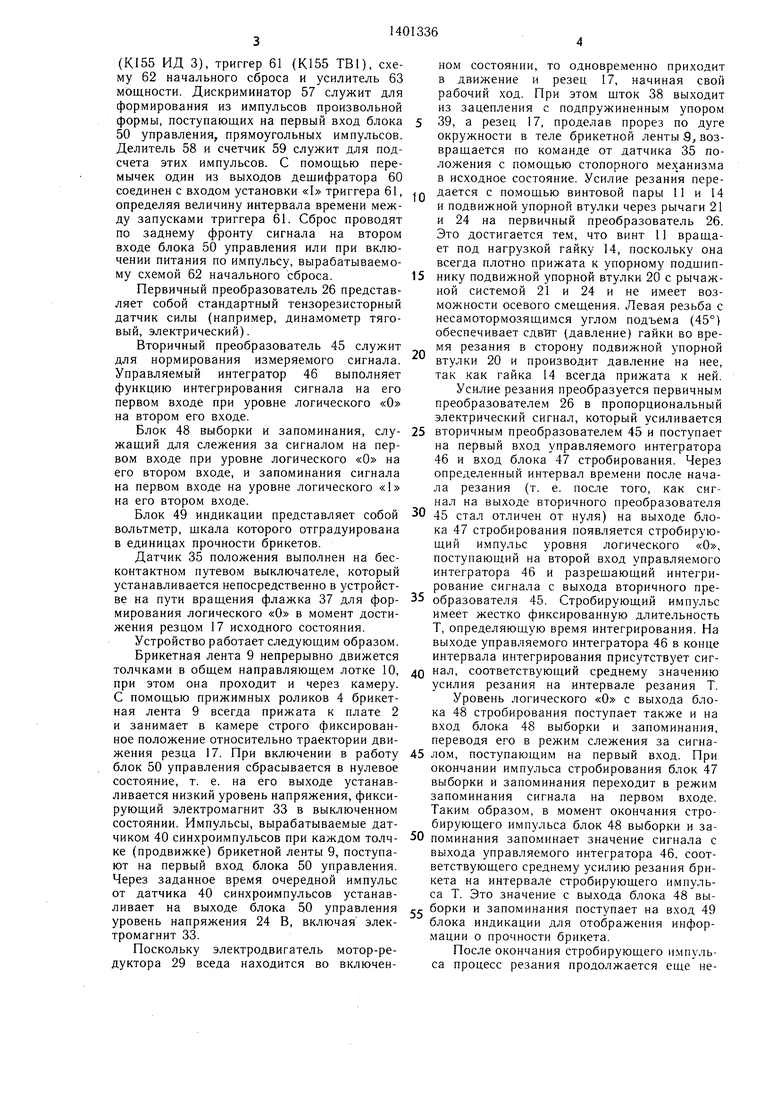
Устройство содержит также механизм перемещения резца., состоящий из винта 1 с несамотормозящим углом подъема резьбы (щага), расположенного в подщипниках 12 качения на вертикальных стойках 13 параллельно плите 1 и перпендикулярно направлению движения брикетной ленты 10 в камере 1-8, гайки 14, выполненной в виде цилиндрического стакана с двумя жестко соединенными с ним резцедержателями 15 прямоугольного сечения (фиг. 4), регулируемыми по высоте вставками 16 с резцами 17, стопорными винтами 18 и плоскими прижимными пружинами 19. Блок измерения усилия резания выполнен в виде расположенной на валу 11 подвижной упорной втулки 20, соприкасающейся с гайкой 14, двух рычагов 21, жестко соединенных с втулкой 22, насаженной на вал, вращающийся в опорных стойках 23. К втулке 22 приварен рычаг 24, расположенный перпендикулярно рычагам 21 и щарнирно соединенный посредством несущих щтифтов с подвижной упорной втулкой 20. Конец рычага 24 соединен посредством серьги 25 с первичным преобразователем 26 усилия в электрический сигнал. Второй конец первичного преобразователя 26 щарнирно закреплен с помощью аналогичной серьги 25 со стойкой 27, смонтированной на плите 1. С помощью пружины 28 гайка 14 всегда прижата к упорному подшипнику подвижной упорной втулки 20, которая держит рычажную систему 21-24 в натянутом состоянии для избежания погрешности измерения из-за люфтов в шарнирных соединениях.
5
Механизм перемещения резца связан с приводом, состоящим из мотор-редуктора 29 и электромагнитной муфты, включающей ведущую полумуфту 30, насаженную на вал
редуктора, и ведомую полумуфту 31, насаженную на цилиндрическую часть винта 11 с возможностью осевого перемещения, и вилкообразный рычаг 32, соединенный с сердечником электромагнита 33 и возвратной пружиной 34. Для обеспечения остановки
0 резца 17 в исходном строго заданном положении после выполнения операции резания предусмотрен датчик 35 положения, расположенный на кронштейне 36, и флажок 37, посаженный на винт 11, а также стос порный механизм, состоящий из штока 38, посаженного на конец винта 11, и подпру- ,жиненного упора 39 с профильной поверхностью, соприкасающейся с концом щто- ка 38.
Устройство содержит также датчик 40
0 синхроимпульсов (тахогенератортипа
Д-IM), приводимый в движение от брикетной ленты 9 через шкив 41, прижимаемый к брикетной ленте 9 с помощью плоской пружины 42, шкив 43, посаженный на вал тахогенератора 40 и ремень 44.
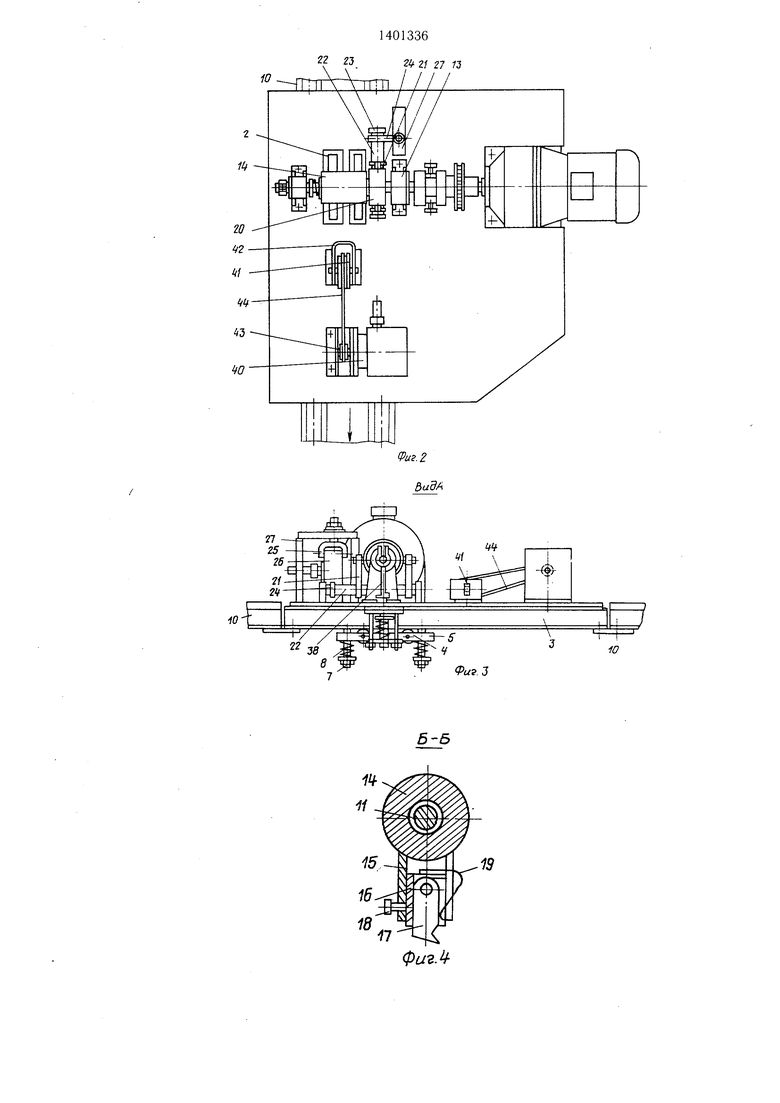
Электронная блок-схема устройства (фиг. 5) содержит первичный преобразователь 26, вторичный преобразователь 45, управляемый интегратор 46, блок 47 стробирования, блок 48 выборки и запоминаQ ния, блок 49 индикации, датчик 40 синхроимпульсов, датчик 35 положения, блок 50 управления и электромагнитный привод 33. Первичный преобразователь 26 и вторичный преобразователь 45 соединены последовательно, блок 50 управления соединен
5 с датчиком 40 синхроимпульсов, датчиком 35 положения и электромагнитом 33 привода, выход вторичного преобразователя 45 соединен с первым входом управляемого интегратора 46 и входом блока 47 стробирования, выход управляемого интегратора
0 46 соединен с первым входом блока 48 выборки и запоминания, выход блока 47 стробирования соединен с вторыми входами управляемого интегратора 46 и блока 48 выборки и запоминания, выход блока 48
5 выборки и запоминания соединен с входом блока 49 индикации, а первичный преобразователь 26 соединен с электромагнитом привода 33 механически через рычажную систему 20-24. Блок 47 стробирования (фиг. 6) состоит
0-из дискриминатора 51 (интегральный компаратор К554 С А2) схемы 52, реализующей логическую функцию И (микросхема К155 ЛИ1), счетчика 53 (микросхема К155 ИЕ5), дешифратора 54 (К155 ИД 3), коммутационной панели 55 и генератора 56.
5 Блок 50 управления включает в себя (фиг. 7) дискриминатор 57 (интегральный компаратор К554 С А2), делитель 58, счетчик 59 (микросхемы К155 ИЕ5), дешифратор 60
(К155 ИД 3), триггер 61 {К155 ТВ1), схему 62 начального сброса и усилитель 63 мощности. Дискриминатор 57 служит для формирования из импульсов произвольной формы, поступающих на первый вход блока 50 управления, прямоугольных импульсов. Делитель 58 и счетчик 59 служит для подсчета этих импульсов. С помощью перемычек один из выходов дешифратора 60 соединен с входом установки «I триггера 61, определяя величину интервала времени между запусками триггера 61. Сброс проводят по заднему фронту сигнала на втором входе блока 50 управления или при включении питания по импульсу, вырабатываемому схемой 62 начального сброса.
Первичный преобразователь 26 представляет собой стандартный тензорезисторный датчик силы (например, динамометр тяговый, электрический).
Вторичный преобразователь 45 служит для нормирования измеряемого сигнала. Управляемый интегратор 46 выполняет функцию интегрирования сигнала на его первом входе при уровне логического «О на втором его входе.
Блок 48 выборки и запоминания, служащий для слежения за сигналом на первом входе при уровне логического «О на его втором входе, и запоминания сигнала на первом входе на уровне логического «1 на его втором входе.
Блок 49 индикации представляет собой вольтметр, щкала которого отградуирована в единицах прочности брикетов.
Датчик 35 положения выполнен на бесконтактном путево.м выключателе, который устанавливается непосредственно в устройстве на пути вращения флажка 37 для формирования логического «О в момент достижения резцом 17 исходного состояния.
Устройство работает следующим образом.
Брикетная лента 9 непрерывно движется толчками в общем направляющем лотке 10, при этом она проходит и через камеру. С помощью прижимных роликов 4 брикетная лента 9 всегда прижата к плате 2 и занимает в камере строго фиксированное положение относительно траектории движения резца 17. При включении в работу блок 50 управления сбрасывается в нулевое состояние, т. е. на его выходе устанавливается низкий уровень напряжения, фиксирующий электромагнит 33 в выключенном состоянии. Импульсы, вырабатываемые датчиком 40 синхроимпульсов при каждом толчке (продвижке) брикетной ленты 9, поступают на первый вход блока 50 управления. Через заданное время очередной импульс от датчика 40 синхроимпульсов устанавливает на выходе блока 50 управления уровень напряжения 24 В, включая электромагнит 33.
Поскольку электродвигатель мотор-редуктора 29 вседа находится во включенном состоянии, то одновременно приходит в движение и резец 17, начиная свой рабочий ход. При этом щток 38 выходит из зацепления с подпружиненным упором
39, а резец 17, проделав прорез по дуге окружности в теле брикетной ленты Q, возвращается по команде от датчика 35 положения с помощью стопорного мех анизма в исходное состояние. Усилие резания переQ дается с помощью винтовой пары 11 и 14 и подвижной упорной втулки через рычаги 21 и 24 на первичный преобразователь 26. Это достигается тем, что винт 11 вращает под нагрузкой гайку 14, поскольку она всегда плотно прижата к упорному подщипнику подвижной упорной втулки 20 с рычажной системой 21 и 24 и не имеет возможности осевого смещения. Левая резьба с несамотормозящимся углом подъема (45°) обеспечивает сдвет (давление) гайки во время резания в сторону подвижной упорной втулки 20 и производит давление на нее, так как гайка 14 всегда прижата к ней. Усилие резания преобразуется первичным преобразователем 26 в пропорциональный электрический сигнал, который усиливается
5 вторичным преобразователем 45 и поступает на первый вход управляемого интегратора 46 и вход блока 47 стробирования. Через определенный интервал времени после начала резания (т. е. после того, как сигнал на выходе вторичного преобразователя
0 45 стал отличен от нуля) на выходе блока 47 стробирования появляется стробирую- щий импульс уровня логического «О, поступающий на второй вход управляемого интегратора 46 и разрешающий интегрирование сигнала с выхода вторичного пре5 образователя 45. Стробирующий импульс имеет жестко фиксированную длительность Т, определяющую время интегрирования. На выходе управляемого интегратора 46 в конце интервала интегрирования присутствует сиг0 нал, соответствующий среднему значению усилия резания на интервале резания Т. Уровень логического «О с выхода блока 48 стробирования поступает также и на вход блока 48 выборки и запоминания, переводя его в режим слежения за сигна5 лом, поступающим на первый вход. При окончании импульса стробирования блок 47 выборки и запоминания переходит в режим запоминания сигнала на первом входе. Таким образом, в момент окончания стро- бирующего импульса блок 48 выборки и за0 поминания запоминает значение сигнала с выхода управляемого интегратора 46, соответствующего среднему усилию резания брикета на интервале стробирующего импульса Т. Это значение с выхода блока 48 выс борки И запоминания поступает на вход 49 блока индикации для отображения информации о прочности брикета.
После окончания стробирующего импульса процесс резания продолжается еще некоторое время. Однако, поскольку на выходе блока 47 стробирования устанавливается уровень логической «I, управляемый интегратор 46 сбрасывается в нулевое состояние, а блок 48 выборки и запоминания находится в режиме запоминания до прихода следующего импульса стробирования.
При выходе резца из брикетной ленты сигнал на выходе вторичного преобразователя 45 понижается до нуля, блок 47 стробирования блокируется, поддерживая на выходе уровень логической «1. После выхода из брикетной ленты 9 резец 17 возвращается в исходное состояние. При достижении резцом 17 исходного состояния датчик 35 положения формирует сигнал логического «О.
По заднему, фронту сигнала с выхода датчика 35 положения на выходе блока 50 управления устанавливается низкое напряжение, отключающее электромагнит 33. Кинематическая цепь разрывается, резец 17 по инерции движется еще некоторое время и стопорится. Далее блок 50 управления возобновляет счет синхроимпульсов, поступающих на его первый вход, формируя временной интервал до следующего цикла измерения. Процесс измерения автоматически повторяется через установленный интервал времени постоянно, пока включено устройство.
Формула изобретения
1. Устройство для контроля прочности образцов брикетов на срез, содержащее резец, камеру для образца в виде несущей плиты с двумя параллельными направляющими, закрепленный на ней механизм перемещения резца с приводом и блоком его управления, рычажную систему, соединяющую резец с механизмом его перемещения, датчик синхроимпульсов и датчик положения резца, связанные своими выходами с соответствующими входами блока управления, блок измерения усилия резания и последовательно соединенные между собой первичный преобразователь, вторичный преобразователь, схему обработки сигналов и блок индикации, отличающееся тем, что, с целью повыщения точности, оно снабжено вторым резцом, механизм перемещения выполнен в виде несамотормозящейся винтовой пары, в-инт которой установлен параллельно несущей плите и перпендикулярно
направляющим и связан с приводом посредством электромагнитной муфты, а гайка подпружинена к камере и выполнена в виде стакана, на котором закреплены оба резца, которые выполнены регулируемыми по дли не, блок измерения усилия резания выполнен в виде установленной на винте соос- но ему с возможностью перемещения упорной втулки, а схема обработки сигналов выполнена в виде последовательно соединенных между собой управляемого интегра0 тора и блока выборки и запоминания и блока стробирования, подключенного своим выходом к входам управляемого интегратора и блока выборки и запоминания, а входом - к входу управляемого интегра - тора.
2. Устройство по п. 1, отличающееся тем, что блок стробирования выполнен в виде последовательно связанных между собой дискриминатора, схемы И; счетчика, дешифратора и коммутационной панели и
n подключенного к счетчику генератора, а блок управления выполнен в виде последовательно связанных между собой дискриминатора, делителя, счетчика, дешифратора, триггера и усилителя мощности и схемы начального сброса, подключенной к
r входу установки триггера в нулевое положение, входы установки делителя и счетчика в нулевое положение подключены к выходу триггера, первый вход блока управления подключен к дискриминатору, второй - к тактируемому входу триггера,
0 а выход блока управления подключен к выходу усилителя мощности.
ю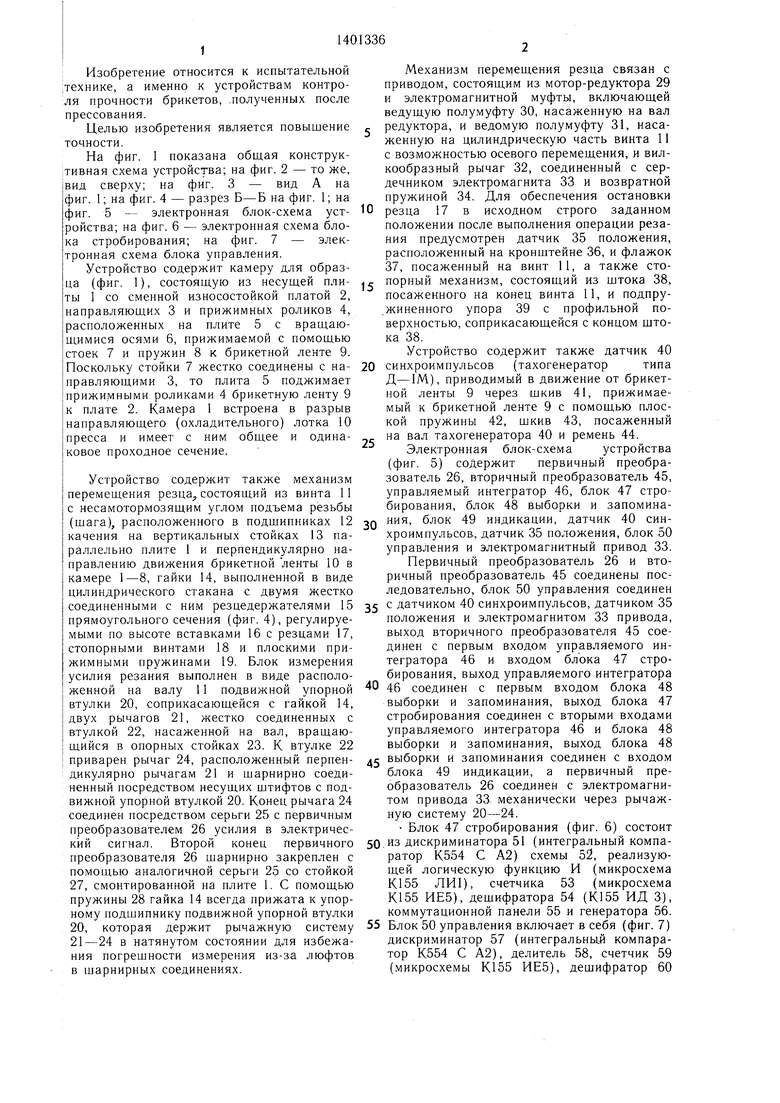

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля прочности брикетов | 1986 |
|
SU1343015A1 |
| Способ контроля прочности брикетов и устройство для его осуществления | 1982 |
|
SU1071745A1 |
| Система автоматического регулирования прочности торфяных брикетов на прессе с охладительными лотками | 1982 |
|
SU1062021A1 |
| Устройство для контроля прочности брикетов на срез | 1987 |
|
SU1518715A1 |
| УСТРОЙСТВО ДЛЯ ОБТОЧКИ КРИСТАЛЛОВ | 1991 |
|
RU2030998C1 |
| Буферное устройство для передачи данных | 1987 |
|
SU1418725A1 |
| Способ контроля прочности брикетов и устройство для его осуществления | 1980 |
|
SU929464A1 |
| Голографическое запоминающее устройство | 1979 |
|
SU780711A1 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| Ротационный резец | 1983 |
|
SU1502208A1 |
Изобретение относится к испытательной технике, а именно к устройства1М для контроля прочности брикетов. Целью изобретения является повышение точности. Это достигается измерением удельного усилия среза резцом 17 на заданную глубину по дуге окружности на верхней поверхности брикета 9 вдоль направления его движения в направляющем лотке 10. Резец 17 смонтирован на цилиндрической гайке 14 и приводится в движение от привода 29 с электромагнитной муфтой 30, 31 посредством винта 11. В момент резания гайка 14 взаимодействует с подвижной упорной втулкой 20, которая через рычаги передает усилие резания на первичный преобразователь. Электронная схема устройства обеспечивает остановку брикетной ленты в камере 1, движение резца 17, возврат резца 17 в исходное положение, измерение среднего усилия резания, его запоминание « и индикацию в единицах прочности. 1 з. п. iS ф-лы, 7 ил.
фигЛ
.
47J
-о -о -о
| Способ контроля прочности брикетов и устройство для его осуществления | 1982 |
|
SU1071745A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
