Изобретение относится к радиолокации и предназначено для оперативного контроля работоспособности импульсных радиолокаторов кругового обзора, имеющих стационарное размещение, в частности обзорных радиолокаторов управления воздушным движением.
Цель изобретения - повышение достоверности контроля за счет допускового многопериодного статистически усредненного измерения контролируемых параметров.
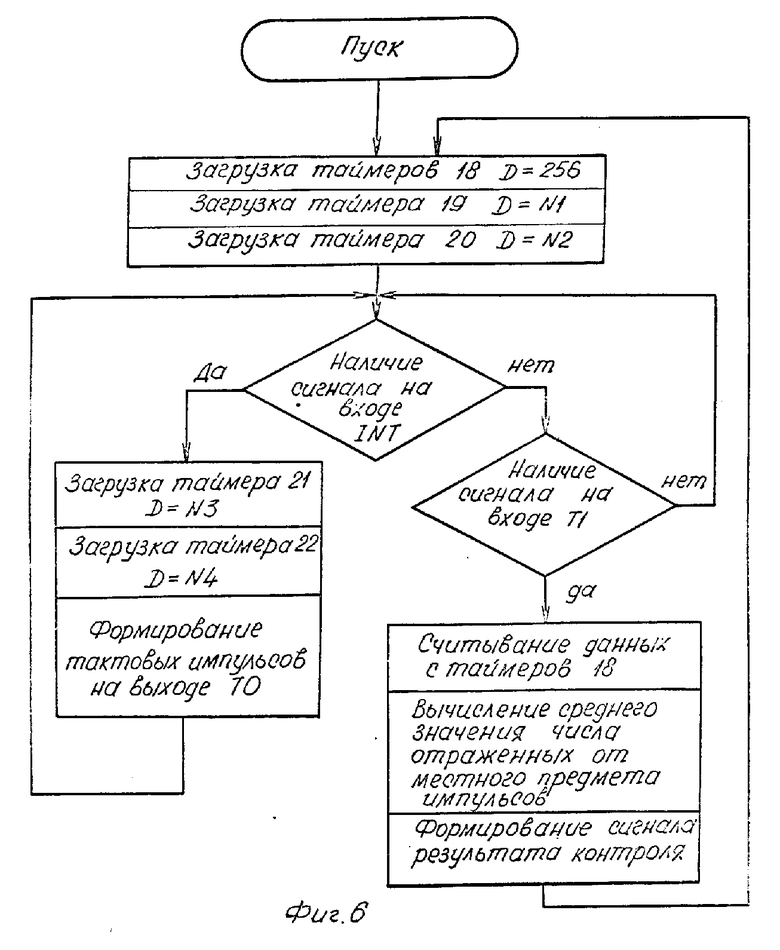
На фиг. 1 приведена структурная электрическая схема предлагаемого устройства; на фиг. 2 - вариант выполнения блоков счета импульсов цели, формирователя строба и блока вычисления; на фиг. 3 - вариант выполнения блока контроля; на фиг. 4 и 5 - схема, поясняющая процесс формирования строба местного предмета; на фиг. 6 - алгоритм работы однокристальной ЭВМ.
Устройство контроля функционирования импульсного радиолокатора содержит n блоков 1 счета импульсов цели, блок 2 контроля наличия служебных импульсов, формирователь 3 строба, счетчик 4, дешифратор 5, блок 6 установки периодов усреднения, блок 7 нормирования, блок 8 сравнения, блок 9 установки пороговых значений, элемент ИЛИ 10 и блок 11 индикации.
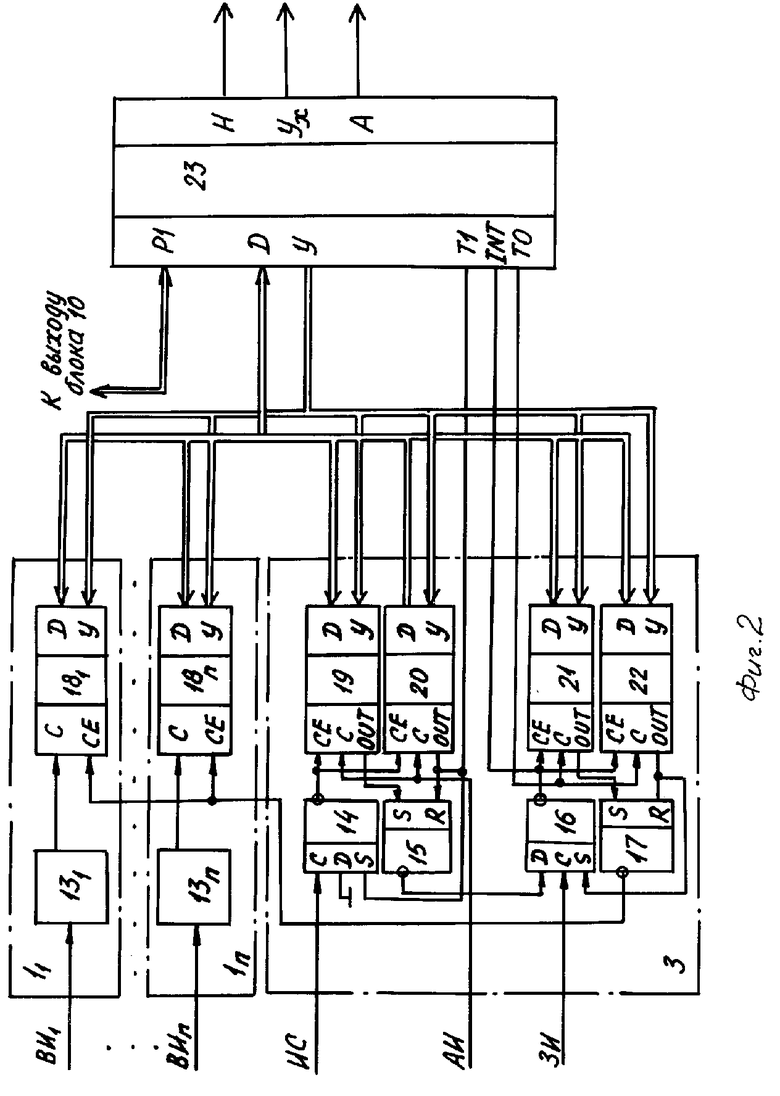
Вариант реализации функциональной схемы основных элементов устройства показан на фиг. 2, где блок 1 счета импульсов цели содержит пороговый элемент 13 и таймер 18; формирователь 3 строба содержит триггеры 14...17 и таймеры 19. . . 22, а блоки 7 нормирования и 8 сравнения совместно с шиной их соединения выполнены на базе однокристальной ЭВМ 23.
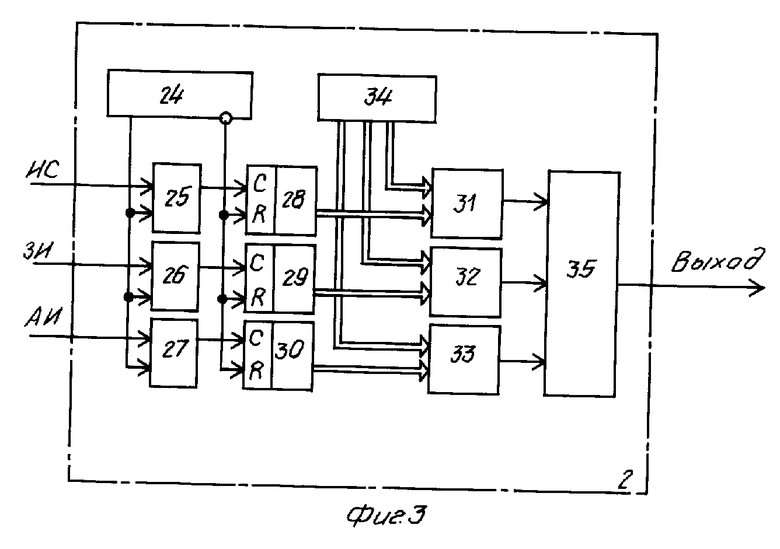
Блок 2 контроля наличия служебных импульсов, вариант реализации которого приведен на фиг. 3, содержит генератор 24, элементы И 25-27, счетчики 38-30, блоки 31-33 сравнения, блок 34 памяти, элемент ИЛИ 35.
Другими позициями обозначены: ВИ - видеоимпульсы; АИ - азимутальные импульсы; ИС - импульсы севера; ЗИ - запускающие импульсы; С - входы синхронизации; R - входы установки нуля; S - входы установки единицы; D - входы/выходы передачи данных таймеров и однокристальной ЭВМ, а также разрешающий вход триггеров: Р1 - порт ввода однокристальной ЭВМ; ТО - выход синхронизации; У - управляющие входы/выходы; СЕ - входы каналов таймера; OUT - выходы каналов таймеров; Т1 - вход счетчика внешних событий процессора; INT - вход прерывания процессора; Н - вход/выход сигнала "норма"; Ух - вход/выход сигнала "ухудшение"; А - вход/выход сигнала "авария".
Принцип действия устройства заключается в контроле технического состояния радиолокатора по двум обобщенным диагностическим признакам.
В качестве первого диагностического признака используются служебные импульсы, формируемые радиолокатором. За один оборот антенны радиолокатора последний должен сформировать определенное количество служебных импульсов. Осуществляя их подсчет за каждый период вращения и сравнивая полученные и номинальные значения числа соответствующих импульсов, можно оценить техническое состояние радиолокатора.
В качестве второго диагностического признака используется сигнал, принимаемый в результате отражения зондирующих импульсов от некоторого характерного местного предмета. Поскольку число импульсов отражения в этом случае практически постоянно, его можно использовать в качестве второго диагностического признака. При этом для получения статистически устойчивой оценки производится усреднение числа отраженных от местного предмета импульсов за несколько оборотов вращения антенны радиолокатора.
Устройство работает следующим образом.
В исходном состоянии все счетные элементы установлены в нулевое состояние. В блоке 6 установки числа периодов усреднения устанавливается число m, соответствующее числу оборотов антенны, за которое производится статистическое усреднение. Для эмпирически определенного числа No числа отражаемых от местного объекта импульсов в блоке 10 установки пороговых значений устанавливаются четыре граничных значения: Nomin, Nomax, Ndmin, Ndmax, которые определяют правило принятия решения по результатам измерения среднего за период вращения числа отраженных от местного объекта импульсов N:
Nomin < N < Nomax - нормальная работа радиолокатора;
Ndmin < N < Nomin, Nomax < N < Ndmax - ухудшение работы;
N < Ndmin, N > Ndmax - аварийный режим работы.
Из опыта эксплуатации радиолокаторов целесообразно выбирать следующие значения уровней порогов:
Ndmin = 0,2 N - нижняя граница зоны ухудшения;
Nomin = 0,8 N - нижняя граница зоны допуска;
(1)
Nomax =1,1 N - верхняя граница зоны допуска;
Ndmax = 1,2 N - верхняя граница зоны ухудшения.
В блоке 31 памяти записаны значения номинального числа служебных импульсов (ИС, АИ, ЗИ), соответствующих числу импульсов, формируемых исправным радиолокатором за один период оборота антенны. Число n каналов обработки соответствует числу контрольных точек радиолокатора, с которых снимаются видеосигналы ВИ1...ВИn (например, с различных каналов обработки сигнала).
Служебные импульсы ИС, АИ и ЗИ поступают на входы формирователя 3 строба, который формирует сигнал строба местного предмета (СМП). В момент действия СМП последний открывает блоки 1.1-1.n, которые осуществляют подсчет числа отраженных от местного предмета импульсов, проходящих по видеотракту радиолокатора за каждый период обзора. Значения Ni (i = 1, ..., n) числа принятых i-м блоком за период действия СМП импульсов поступают с выходов блоков 1.1-1.n в блок 7 нормирования, где производится их суммирование.
Одновременно импульсы севера ИС поступают на вход счетчика 4 числа оборотов. Когда значение счетчика 4 достигнет числа m периодов усреднения, заданного с блока 6 установки, на выходе дешифратора 5 появляется сигнал, который устанавливает счетчик 4 в исходное нулевое состояние и, поступая на упpавляющий вход блока 7, завершает процесс накопления числа отражаемых от местного объекта импульсов. С приходом сигнала с выхода дешифратора 5 блок 7 нормирования осуществляет статистическое нормирование отраженных от местного объекта видеоимпульсов, поступивших на его вход по n каналам за m оборотов антенны, по формуле
N =
 Nij/(nm), (2) где N - усредненное число принятых от местного объекта импульсов, формируемое на выходе блока 7;
Nij/(nm), (2) где N - усредненное число принятых от местного объекта импульсов, формируемое на выходе блока 7;
Nij - число импульсов, зарегистрированных в i-м канале (i = i,...n) в j-м периоде вращения (j = 1, .., m). Сигнал, соответствующий значению N, поступает в блок 8 сравнения, где сравнивается с допустимыми значениями, установленными в блоке 9 установки пороговых значений. Сигнал на выходе Н ("норма") блока 8 появляется, если Nomin < N < Nomax. Сигнал на выходе У ("ухудшение") появляется, если Ndmin < N < Nomin или Nomax < N < Ndmax. Сигнал на выходе А ("авария") блока 8 появляется если N < Ndmin или N > Ndmax. Указанные сигналы поступают для отображения в блок 11 индикации (сигналы "норма" и "ухудшение" - непосредственно, сигнал "авария" - через элемент ИЛИ 10), в качестве которого может использоваться визуальный индикатор или датчик иерархически более высокой автоматизированной системы.
Одновременно служебные импульсы радиолокатора поступают на входы блока 2 контроля наличия служебных импульсов. В указанном блоке (см. фиг. 3) генератор 24 формирует импульсы калиброванной длительности, соответствующие эталонному значению периода вращения антенны радиолокатора. Указанные импульсы с прямого выхода генератора 24 открывают элементы И 25-26, которые пропускают служебные импульсы на входы счетчиков 28-30. Последние осуществляют подсчет количества соответствующих служебных импульсов, формируемых за один оборот антенны радиолокатора. В блоках 31-33 сравнения подсчитанные значения сравниваются с эталонными, записанными в блоке 34 памяти. Если число формируемых радиолокатором за период вращения импульсов соответствует эталонному значению, сигналы на выходах блоков 31-33 отсутствуют. Если указанные значения не совпадают, на выходе соответствующего блока сравнения формируется сигнал отказа, который через элемент ИЛИ 35 и далее через элемент ИЛИ 10 поступает в блок 11 индикации для отображения аварийного состояния.
Практическая реализация отдельных узлов и блоков предлагаемого устройства может быть осуществлена разнообразными методами. В качестве примера на фиг. 2 приведена реализация трактов формирования строба местного предмета и статистической обработки числа принимаемых сигналов на базе элементов микроэлектроники средней и высокой степени интеграции - таймеров и однокристальной ЭВМ.
Работа приведенных на фиг. 2 узлов осуществляется следующим образом.
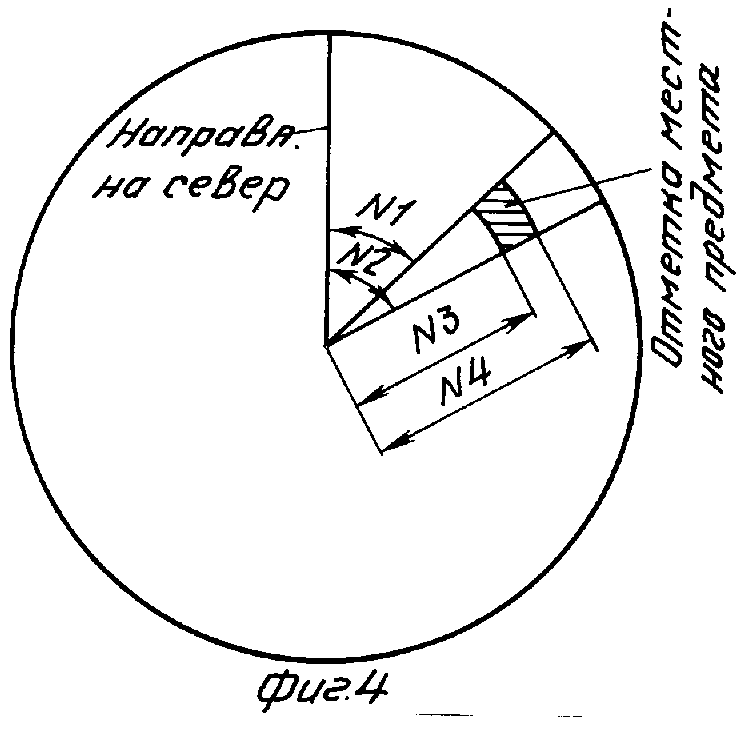
Формирование строба местного предмета осуществляется блоком 3, процесс формирования поясняется диаграммой, показанной на фиг. 4. Алгоритм работы процессора, участвующего в процессе формирования СМП, приведен на фиг. 6.
В исходном состоянии в постоянной памяти однокристальной ЭВМ 23 записаны коды отсчетов азимута местного предмета N1 и N2 и коды отсчетов дальности местного предмета N3, N4 (см. фиг. 4). Все триггерные элементы установлены в нулевое состояние.
Для получения программно-управляемых задержек, пропорциональных координатам местного предмета N1...N4, служат таймеры 19...22. Коды указанных значений загружаются в таймеры по входам D при наличии соответствующих управляющих сигналов на входах У. При подаче на счетные входы С таймеров импульсов и при наличии разрешающего сигнала на входе СЕ происходит считывание записанных в таймер данных (последовательное уменьшение их значения на единицу с приходом каждого счетного импульса). При полном считывании данных (значение данных становится равным нулю) формируется сигнал на выходе OUT канала таймера.
При первичном включении устройства в соответствии с алгоритмом работы управляющей однокристальной ЭВМ (см. фиг. 6) осуществляется загрузка таймеров 18 данными максимально допустимой величины, таймера 19 - данными, соответствующими азимуту N1 местного предмета, таймера 20 - данными, соответствующими азимуту N2 местного предмета. Загрузка осуществляется путем подачи соответствующих управляющих сигналов по шине У и соответствующих данных по шине D от однокристальной ЭВМ 23 на соответствующие таймеры.
В момент прохода радиолокатором северного направления формируется импульс севера ИС, который поступает на счетный вход С триггера 14. На его выходе формируется сигнал, поступающий на разрешающие входы СЕ таймеров 19, 20. Таймеры переводятся в режим считывания: при поступлении на их входы С азимутальных импульсов АИ записанные в таймерах значения последовательно уменьшаются.
При поступлении числа N1 азимутальных импульсов данные, записанные в таймере 19, принимают нулевое значение. На выходе OUT таймера 19 появляется сигнал, устанавливающий триггер 15 в единичное состояние. При поступлении числа N2 азимутальных импульсов нулевое значение принимают данные, записанные в таймере 20. При этом сигнал с его выхода OUT возвращает триггер 15 в исходное нулевое состояние. Таким образом, на выходе триггера 15 формируется азимутальный строб местного предмета.
В момент действия азимутального СМП сигнал с выхода триггера 15 поступает на вход D триггера 16, чем достигается перевод его на период действия азимутального СМП в счетный режим.
В момент прихода запускающего импульса ЗИ триггер 16 срабатывает и сигналом своего выхода открывает таймеры 21 и 22 по входу СЕ, одновременно формируя сигнал на входе INT однокристальной ЭВМ 23. Последняя в соответствии с алгоритмом своей работы (см. фиг. 6) осуществляет загрузку таймеров 21, 22 данными, соответствующими дальности до местного предмета N3 и N4 (см. фиг. 4).
После выполнения загрузки таймеров однокристальная ЭВМ 23 формирует на своем выходе ТО последовательность тактовых импульсов, поступающих на вход считывания С таймеров 21, 22.
При поступлении на вход таймера 21 числа импульсов, соответствующего дальности местного предмета N3, данные, записанные в таймер, принимают нулевое значение, появляется сигнал на его выходе OUT, который устанавливает триггер 17 в единичное состояние.
При поступлении на вход таймера 22 числа импульсов соответствующего дальности местного предмета N4 данные, записанные в таймер, принимают нулевое значение, появляется сигнал на его выходе OUT, который возвращает триггер 17 в исходное нулевое состояние.
Таким образом, на выходе триггера 17 формируется строб местного предмета по дальности, который поступает на разрешающие входы СЕ канальных таймеров 18. В период действия СМП по дальности видеоимпульсы каналов радиолокатора ВИ1...ВИn, проходя через пороговые элементы 13, поступает на счетные входы С таймеров 18, осуществляющих подсчет числа отраженных от местного предмета импульсов. Пороговые элементы 13 осуществляют ограничение уровня видеоимпульсов с целью нормирования их амплитуды и исключения шумов.
С приходом следующего зондирующего импульса ЗИ указанный процесс повторится, произойдет загрузка в таймеры 21, 22 очередной пары данных N3, N4 и аналогично произойдет продолжение накопления в таймерах 18 числа отраженных от местного предмета импульсов.
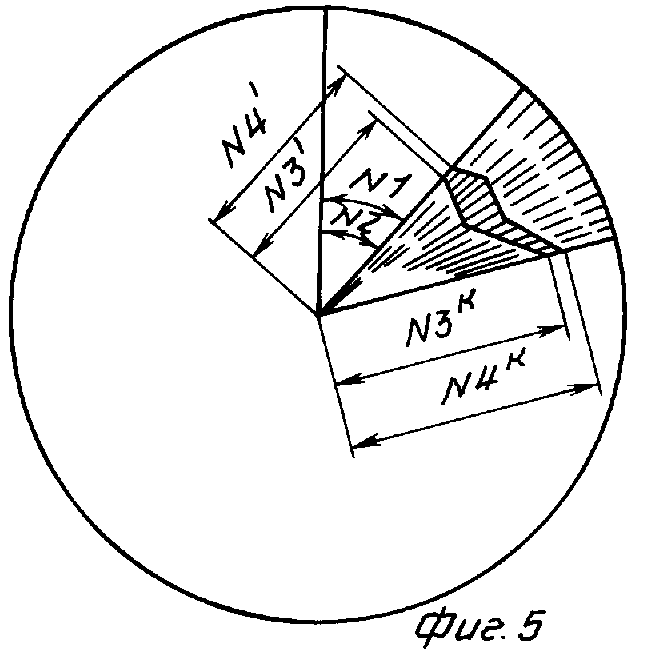
При наличии местного предмета сложной формы пары значений N3, N4 для каждого из азимутов могут отличаться. При этом на каждый зондирующий импульс ЗИ будет загружаться та пара данных N3, N4, которая соответствует соответствующим дальностям до местного предмета по соответствующему азимуту (см. фиг. 5).
После окончания облучения местного предмета, что соответствует моменту окончания азимутального СМП, сигнала с выхода OUT таймера 20 поступает на вход Т1 однокристальной ЭВМ 23, которая в соответствии с алгоритмом работы считывает записанные в канальных таймерах 18 значения числа отраженных от местного предмета импульсов, по формуле (2) вычисляет статистическую оценку его величины, и с использованием правил принятия решения (2) формирует на своем выходе Р2 сигнал с результатами контроля: "норма", "ухудшение" или "отказ".
В простейшем случае указанный сигнал может быть сформирован параллельным трехпозиционным двоичным кодом:
001 - нормальная работа;
010 - ухудшение работы;
100 - отказ.
Указанные сигналы поступают для отображения в блок 12 индикации (см. фиг. 1), при этом младший и средний разряды - непосредственно, а старший разряд (сигнал "отказ") - через элемент ИЛИ 10.
Блок 9 установки пороговых значений может быть выполнен в виде наборного поля, например, с использованием различного рода двухпозиционных переключателей, выходной сигнал с которого подается непосредственно на входной порт однокристальной ЭВМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПУСКА РАКЕТ | 1981 |
|
RU2121647C1 |
| Устройство для диагностирования коллекторной электрической машины | 1983 |
|
SU1182446A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2421751C1 |
| Устройство для измерения коэффициента гармоник | 1986 |
|
SU1430910A1 |
| КОСМИЧЕСКИЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЮЩИЙ ИЗОБРАЖЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ | 1999 |
|
RU2158008C1 |
| СТАБИЛОГРАФ | 1994 |
|
RU2095025C1 |
| Многоканальный программируемый преобразователь код-фаза | 1990 |
|
SU1742998A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ | 1990 |
|
RU2018874C1 |
| Многоканальный резервированный радиоцентр | 1983 |
|
SU1228322A1 |
| УСТРОЙСТВО ДЛЯ ВЫСОКОЧАСТОТНОЙ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1996 |
|
RU2100827C1 |
Использование: обзорные радиолокаторы управления воздушным движением. Сущность изобретения: устройство содержит N болков 1 счета импульсов цели, блок 2 контроля наличия служебных импульсов, формирователь 3 строба, счетчик 4, дешифратор 5, блок 6 установки периодов усреднения, блок 7 нормирования, блок 8 усреднения, блок 9 установки пороговых значений, элемент ИЛИ 10, блок индикации 11, что позволяет повысить достоверность контроля по двум диагностическим признакам. 1-7-8-10-11, 8-11, 9-8-11, 6-5, 4-5-7, 3-7, 3-1, 2-10, 5-4. 6 ил.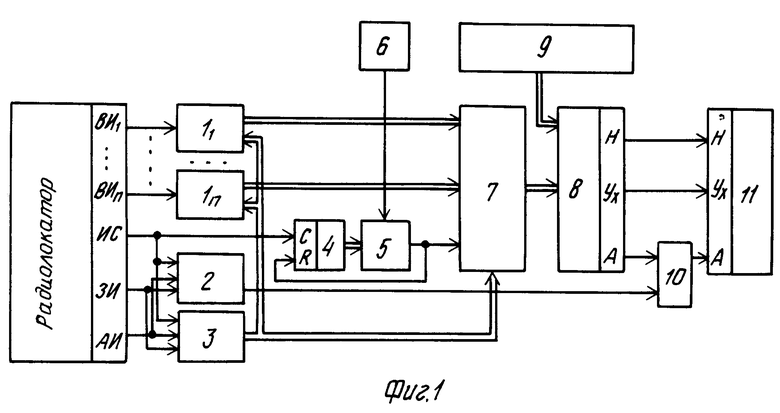
УСТРОЙСТВО КОНТРОЛЯ ИМПУЛЬСНОЙ РЛС КРУГОВОГО ОБЗОРА, содержащее формирователь строба, счетчик, дешифратор и блок индикации, отличающееся тем, что, с целью повышения достоверности контроля, в устройство введены n-блоков счета импульсов цели, блок нормирования, блок сравнения, блок установки пороговых значений, блок контроля наличия служебных импульсов, блок установки периода усреднения, элемент ИЛИ, при этом первый вход формирователя строба является входом видеоимпульса "Север", второй вход - входом зондирующих видеоимпульсов, третий вход - входом азимутальных видеоимпульсов, выход счетчика соединен с информационным входом дешифратора, информационные входы n-блоков счета импульсов цели являются входами видеоимпульсов цели, первый вход блока контроля наличия служебных импульсов является входом видеоимпульсов "Север", второй вход - входом зондирующих видеоимпульсов, третий вход - входом азимутальных видеоимпульсов, счетный вход счетчика является входом видеоимпульсов "Север", выход формирователя строба соединен с первым управляющим входом блока нормирования и с управляющими входами n-блоков счета импульсов цели, выходы которых соединены с информационными входами блока нормирования, выход которого соединен с информационным входом блока сравнения, первый и второй выходы которого соединены соответственно с первым и вторым входами блока индикации, а третий выход - с первым входом элемента ИЛИ, выход которого соединен с третьим входом блока индикации, выход блока установки периода усреднения соединен с управляющим входом дешифратора, выход которого соединен с установочным входом счетчика и с вторым управляющим входом блока нормирования, выход блока установки пороговых значений соединен с управляющим входом блока сравнения, выход блока контроля наличия служебных импульсов - с вторым входом элемента ИЛИ.
| Патент США N 3199107, кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
