Изобретение относится к измерительной технике, в частности к методам и средствам оптической локации, и предназначено для использования в светолокационных системах технического зрения.
Известен способ идентификации поверхности лоцирования с помощью лазерной дальнометрической обзорно-информационной системы технического зрения, заключающийся в измерении расстояний до нескольких точек вдоль сечения предмета с последующим анализом геометрических характеристик идентифицируемой поверхности.
Недостатком этого способа является то, что анализ только геометрических характеристик поверхности не дает возможности достоверно классифицировать объект при наличии нескольких предметов похожей конфигурации.
Известен способ идентификации однородной поверхности по характеристикам отраженного светолокационного сигнала, заключающийся в том, что не менее, чем в трех точках поверхности, расположенных не на одной прямой, измеряют координаты светового луча, сдвиг, а также амплитуду отраженного сигнала.
Недостатком такого способа является недостоверность идентификации поверхностей, различающихся своей макроструктурой, определяющие размеры граней которой соизмеримы с размерами зондирующего светового пятна на этой поверхности.
Целью изобретения является повышение точности идентификации однородной поверхности по характеристикам отраженного светолокационного сигнала.
Это достигается тем, что при способе идентификации однородной поверхности по характеристикам отраженного светолокационного сигнала, заключающемся в том, что не менее, чем в трех точках поверхности, расположенных не на одной прямой, измеряют координаты светового луча, сдвиг, а также амплитуду отраженного сигнала, выбирают расстояния между точками из условия пространственного непересечения световых потоков, а совокупность измерений производят два раза в одинаковых условиях, но при различных площадях светового пятна на поверхности, в каждой точке измерений вычисляют величину, равную произведению амплитуды отраженного сигнала и квадрата расстояния до точки измерений, определяют отношение дисперсий вычисленной величины каждой совокупности измерений и в зависимости от того, близко ли это отношение к единице S1/S2 или занимает промежуточное положение между единицей и S1/S2 принимают решение в виде идентифицируемой поверхности, где S1, S2 - площадь засвеченных излученным сигналом областей этой поверхности соответственно при первой и второй совокупности измерений.
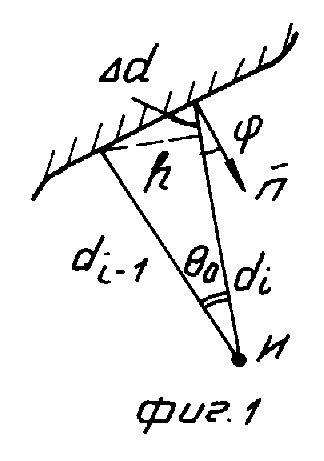
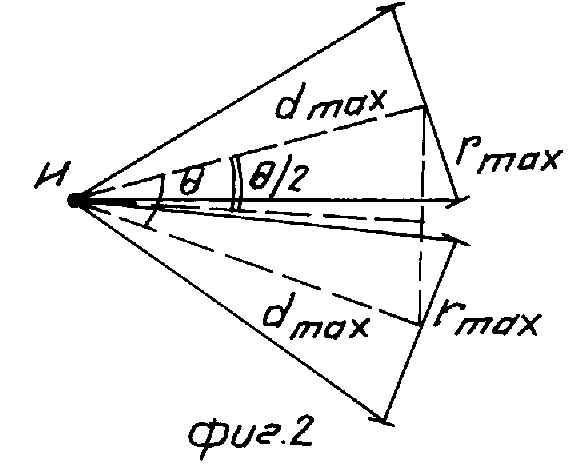
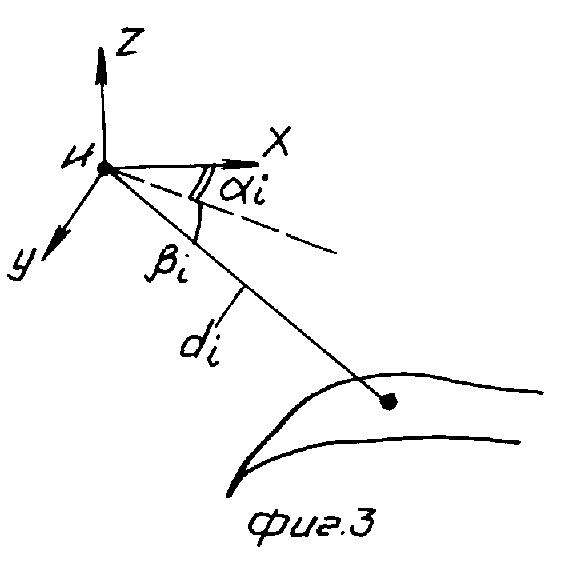
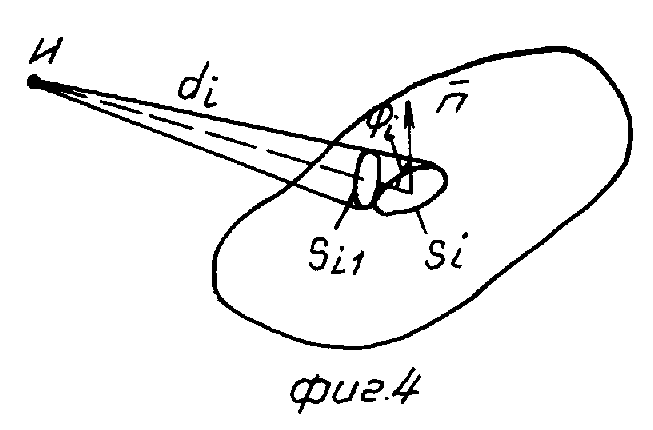
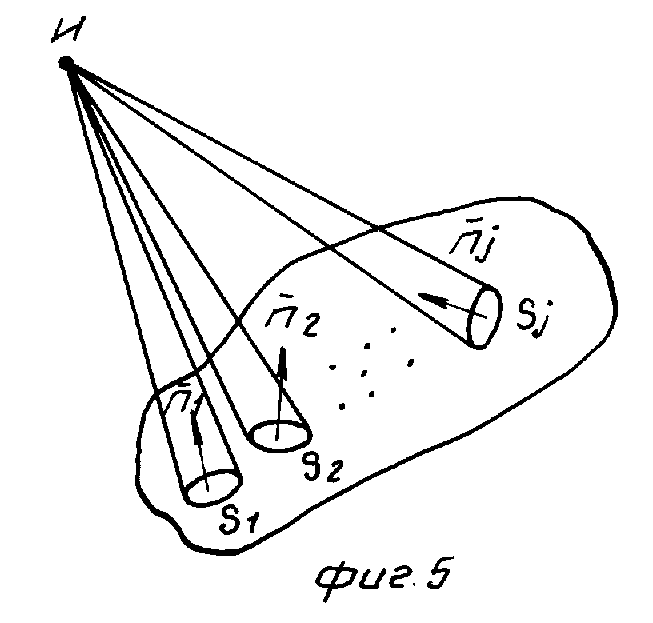
На фиг. 1 представлена схема лоцирования поверхности, когда размеры светового пятна и расстояние между точками лоцирования много меньше размеров ее грани; на фиг. 2 - схема определения минимального углового дискрета θ перемещения светового луча; на фиг. 3 - схема измерений сферических координат точек поверхности; на фиг. 4 - схема определения площади светового пятна на поверхности; на фиг. 5 - схема зондирования поверхности, состоящей из различно ориентированных микроплощадок.
Способ идентификации однородной поверхности по характеристикам отраженного светолокационного сигнала заключается в следующем.
Задают расположение лоцируемых точек на поверхности. Для этого выбирают угловую дискретность лоцирования идентифицируемой поверхности светолокационной системы технического зрения, состоящей из светодальномера, устройства обзора и управляющего вычислительного устройства. Выбор производят из условия расположения зондируемых точек на поверхности так, чтобы световые потоки, направленные в них пространственно, не пересекались.
Для этого на максимальной дальности расположения точек поверхности от системы зрения dmax рассчитывают радиус светового пучка по формуле rmax=  , где m - известный конструктивный коэффициент, учитывающий расходимость светового излучения и конструкцию оптической системы.
, где m - известный конструктивный коэффициент, учитывающий расходимость светового излучения и конструкцию оптической системы.
Очевидно (см. фиг. 2), что условием непересечения световых потоков на расстоянии dmax является расположение линии визирования через такие углы θ, что должно выполняться условие
sin  ≥
≥  . Угол θ является минимальным дискретом углового перемещения светового луча как в азимутальной плоскости, так и по углу возвышения.
. Угол θ является минимальным дискретом углового перемещения светового луча как в азимутальной плоскости, так и по углу возвышения.
Затем не менее, чем в трех точках поверхности, лежащих не на одной прямой, осуществляют съем сферических координат этих точек (дальности di, угла азимута α i, угла возвышения βi) с угловой дискретностью не менее θ относительно места установки системы (см. фиг. 3).
При этом величины углов α i и βi снимают непосредственно с датчиков устройства обзора, а дальность di вычисляют, исходя из сдвига принятого отраженного сигнала относительно излученного в соответствии с формулой
di=  =
=  , где С - скорость света, м/с;
, где С - скорость света, м/с;
f - частота сигнала модуляции, Гц.
Одновременно с этим в каждой точке измеряют амплитуду принятого сигнала.
Для каждых трех соседних точек на поверхности, не лежащих на одной прямой, по результатам измерений вычисляют углы между линиями распространения светового луча в каждой из указанных точек и нормалью к плоскости, проходящей через них.
Для этого сферические координаты точек, полученные путем измерений α i , βi, di преобразуют в декартовые

При этом предполагается, что начало координат совпадает с местоположением светолокационной системы (точка хо = 0, yo = 0, zo = 0). Для любых трех точек уравнение плоскости, проходящей через них, имеет вид





В результате раскрытия определителя задают уравнение вида Ax + By + Cz + L, где A, B, C, L имеют числовое выражение. Определяют уравнение прямой, вдоль которой распространяется луч =
=  =
= 
С учетом того, что (xo, yo, zo) = (0, 0, 0), имеет место равенство: =
=  =
= 
Таким образом, угол между линией распространения светового луча и плоскостью находят для каждой точки по формуле
sinγi= где 0 ≅ γ2<
где 0 ≅ γ2< 
Угол ϕi между нормалью к плоскости и линией распространения светового луча в i-й точке поверхности вычисляют как  - γi
- γi
Для измеренных точек поверхности определяют площадь светового пятна (см. фиг. 4) по формуле: Si=  , где Si1 = m ˙ di3 - площадь сечения светового луча на длительности.
, где Si1 = m ˙ di3 - площадь сечения светового луча на длительности.
Для не менее чем трех точек, лежащих в одной плоскости, находят величины Pidi2, где Pi - измеренное значение амплитуды принятого сигнала в точке.
Для этих точек производят вычисление дисперсии Di по формуле
Di=  где N - количество точек, по которым производится вычисление дисперсии.
где N - количество точек, по которым производится вычисление дисперсии.
Выполняют вторую совокупность измерений при другой площади светового пятна на поверхности. Изменение последней возможно либо посредством перемены дистанции лоцирования di, либо угла наклона лазерного луча к поверхности ϕi, либо путем конструкционного изменения расходимости светового излучения.
Затем повторяют весь порядок действий, в результате чего рассчитывают значение D2 для точек из второй совокупности измерений.
Определяют отношение D1/D2. Так как суммарный световой поток, отраженный от поверхности и принятый измерителем, представляет сумму потоков от элементарных площадок поверхности, попавших в область светового пятна и имеющих собственную ориентацию микронормали nj (см. фиг. 5), то отраженный сигнал есть суперпозиция потоков от микроплощадок. Тогда измерением величины Pidi2 в каждой точке фактически осуществляют ее определение по l потокам от микроплощадок. Поэтому величина дисперсии будет определяться как D =  , где Do - дисперсия результата измерений величины P
, где Do - дисперсия результата измерений величины P di2 от одной микроплощадки. Дисперсии измеренной совокупности значений Pidi2, D1 и D2 определяются влиянием двух независимых между собой факторов: величиной шума на входе фотоприемника, зависящего от фоновых световых потоков и температурного режима работы, а также углами наклона микронормали элементарных площадок (граней) поверхности. Известно, что дисперсия двух независимых величин есть сумма дисперсий, поэтому
di2 от одной микроплощадки. Дисперсии измеренной совокупности значений Pidi2, D1 и D2 определяются влиянием двух независимых между собой факторов: величиной шума на входе фотоприемника, зависящего от фоновых световых потоков и температурного режима работы, а также углами наклона микронормали элементарных площадок (граней) поверхности. Известно, что дисперсия двух независимых величин есть сумма дисперсий, поэтому
D1= D1(φ,T) + 
D2= D2(φ,T) +  причем в нормальных условиях D1,2(Φ ,T) << Do( θ), где D1,2(Φ , T) - составляющая дисперсии, зависящая от мощности фоновых световых потоков (Φ ) и температуры окружающей среды (Т); Do(θ) - составляющая дисперсии, зависящая от угла наклона нормали микроплощадки к линии визирования.
причем в нормальных условиях D1,2(Φ ,T) << Do( θ), где D1,2(Φ , T) - составляющая дисперсии, зависящая от мощности фоновых световых потоков (Φ ) и температуры окружающей среды (Т); Do(θ) - составляющая дисперсии, зависящая от угла наклона нормали микроплощадки к линии визирования.
Учитывая, что шумовая составляющая не зависит от характеристики лоцируемой поверхности, а обе совокупности измерений производят в одинаковых условиях (в том числе тепловых и световых), то D1(Φ, T) ≈D2(Φ , T) = Do( Φ, T). Поэтому отношение D1/D2 определяется как =
= 
При анализе этого выражения возможны несколько вариантов:
а) отношение D1/D2 близко к единице. Это значит, что независимо от того, что l1/l2 = S1/S2 конечно, величины  и
и  много меньше, чем Do(Φ , T). Это возможно, когда в площадь пятна подает бесконечно большое количество элементарных площадок (граней) и поверхность имеет плоскую структуру;
много меньше, чем Do(Φ , T). Это возможно, когда в площадь пятна подает бесконечно большое количество элементарных площадок (граней) и поверхность имеет плоскую структуру;
б) отношение D1/D2 близко к соотношению S1/S2, т.е. к отношению l1/l2. В этом случае Do(Φ, T) много меньше величин  и
и  . Значит в площадь пятна попадает конечное и небольшое количество элементарных площадок (граней). Поэтому лоцируемая поверхность имеет элементарные грани, размеры которых соизмеримы с площадью светового пятна;
. Значит в площадь пятна попадает конечное и небольшое количество элементарных площадок (граней). Поэтому лоцируемая поверхность имеет элементарные грани, размеры которых соизмеримы с площадью светового пятна;
в) отношение D1/D2 имеет промежуточное значение между 1 и S1/S2. Это значит, что 

 сравнимо с величиной Do( Φ, T). В этом случае количество элементарных площадок, попадающих в площадь светового пятна велико, но конечно. Поэтому поверхность имеет характер мелкоребристой структуры относительно размеров светового пятна.
сравнимо с величиной Do( Φ, T). В этом случае количество элементарных площадок, попадающих в площадь светового пятна велико, но конечно. Поэтому поверхность имеет характер мелкоребристой структуры относительно размеров светового пятна.
Таким образом, проведение двух совокупностей измерений и соответствующий анализ их результатов позволяют сделать вывод о соотношении размеров макроструктуры поверхности с размерами светового пятна на лоцируемой поверхности, а это позволяет получить дополнительный признак для идентификации предмета лоцирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНЦЕНТРАТОР | 1993 |
|
RU2047191C1 |
| Способ определения функции распределения микроплощадок по наклонам шероховатой плоской поверхности образца | 1988 |
|
SU1633375A1 |
| СПОСОБ СВЯЗИ С МНОГОПАРАМЕТРИЧЕСКОЙ АДАПТАЦИЕЙ | 2006 |
|
RU2323526C2 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2483986C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ОПТИЧЕСКИХ ДИФРАКЦИОННЫХ МЕТОК | 1998 |
|
RU2208248C2 |
| СПОСОБ БЕСКОНТАКТНОГО ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПРОФИЛЯ ТВЕРДОГО ТЕЛА | 2004 |
|
RU2320959C9 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134431C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА РАДИОСВЯЗИ ОТ РАДИОНАВОДИМОГО ВЫСОКОТОЧНОГО ОРУЖИЯ И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2516265C2 |
Изобретение относится к измерительной технике, в частности к методам и средствам оптической локации, и предназначено для использования в светолокационных системах технического зрения. Целью изобретения является повышение достоверности идентификации однородной поверхности за счет сравнения размеров граней ее макроструктуры с рамерами светового пятна в точке зондирования. Способ идентификации однородной поверхности по характеристикам отраженного светолокационного сигнала заключается в том, что не менее, чем в трех точках поверхности, расположенных не на одной прямой, измеряют координаты светового луча, сдвиг а также амплитуду отраженного сигнала, расстояния между точками выбирают из условия пространственного непересечения световых потоков, а совокупность измерений производят два раза в одинаковых условиях, но при различных площадях светового пятна на поверхности, в каждой точке измерений вычисляют величину, равную произведению амплитуды отраженного сигнала и квадрата расстояния до точки измерений, определяют отношение дисперсий вычисленной величины каждой совокупности измерений и в зависимости от того, близко ли это отношение к единице, S1/S2 или занимает промежуточное положение между единицей и S1/S2 принимают решение о виде идентифицируемой поверхности, где S1/S2 площадь засвеченных излученным сигналом областей этой поверхности при первой и второй совокупности измерений соответственно. 5 ил.
СПОСОБ ИДЕНТИФИКАЦИИ ОДНОРОДНОЙ ПОВЕРХНОСТИ ПО ХАРАКТЕРИСТИКАМ ОТРАЖЕННОГО СВЕТОЛОКАЦИОННОГО СИГНАЛА, заключающийся в том, что не менее чем в трех точках поверхности, расположенных не на одной прямой, измеряют координаты светового луча, сдвиг, а также амплитуду отраженного сигнала, отличающийся тем, что выбирают расстояния между точками из условия пространственного непересечения световых потоков, а совокупность измерений производят два раза в одинаковых условиях, но при различных площадях светового пятна на поверхности, в каждой точке измерений вычисляют величину, равную произведению амплитуды отраженного сигнала и квадрата расстояния до точки измерений, определяют отношение дисперсий вычисленной величины каждой совокупности измерений и взависимости от того, близко ли это отношение к единице S1/S2 или занимает промежуточное положение между единицей и S1/S2, принимают решение о виде идентифицируемой поверхности, где S1, S2 - площади засвеченных излученным сигналом областей этой поверхности при первой и второй совокупности измерений соответственно.
| Д.Нитцан, А.Э | |||
| Брейн, Р.О.Дуда | |||
| Измерение и использование в анализе сцен согласованных данных о дальности и отражательной способности | |||
| ТИИЭР, 1977, т.65, N 2, с.37. |
