Изобретение относится к способам радиолокационного зондирования местности в целях оперативного обнаружения на фоне земной (водной) поверхности малоразмерных объектов, их распознавания и определения с высокой точностью их местоположения, например, при картографировании, составлении подробной цифровой карты местности, составлении земельного кадастра, определении района природной или индустриальной катастрофы, ее масштабов и последствий. Эти же задачи приходиться решать и при помощи пострадавшим и терпящим бедствие, например, при их поиске или когда доставку грузов с помощью летательных аппаратов (ЛА) осуществляют в точку с заданными геодезическими координатами.
При этом последовательно решаются связанные между собой две задачи: сначала необходимо обнаружить искомые объекты или требуемые фрагменты местности, различить и выделить их на фоне других предметов, распознать, а затем определить их координаты, например, геодезические. Связь между этими задачами заключается не только в их пересечении по времени, как, например, при многоэтапном обнаружении, но и в том, что их эффективность во многом определяется одними и теми же факторами, причем условия эффективного решения двух рассматриваемых задач иногда противоречивы. Например, высокое разрешение и детализация объекта, требуемые при решении задач распознавания и определения координат объекта, могут существенно усложнить задачу его обнаружения. В частности, в радиолокаторе с синтезированной апертурой (РСА) повышение разрешения связано с использованием высокой несущей частоты зондирующего сигнала. Но повышение этой частоты приводит, как правило, не только к увеличению разрешающей способности РСА, но и к увеличению отражений от местности, что усложняет выделение искомых объектов на фоне этой местности.
В настоящее время существуют различные способы и средства авиационного дистанционного зондирования. Это и цифровые, и аналоговые аэрофотоаппараты, радиолокаторы, спектрозональные и тепловизионные сканеры и пр. Все они обеспечивают формирование того или иного изображения земной (водной) поверхности и объектов на ней соответствующего качества, по которым решают задачи обнаружения, распознавания, идентификации природных и индустриальных объектов, различных сооружений и пр. Таким образом, решается первая из названных задач.
Вторая задача - определение геодезических координат - в настоящее время все более успешно решается методом прямого геопозиционирования (см., например, статья Е.М. Медведева. «Интегральные навигационные комплексы GPS/IMU». Журнал Геопрофи, 3-6, 2005). При этом на борту ЛА используют навигационные датчики, которые фиксируют положение устройств зондирования непосредственно в процессе этого зондирования. Исходя из этих навигационных данных, осуществляют определение геодезических координат объектов, обнаруженных на изображениях земной поверхности. Этот метод существенно выигрывает перед обычной стандартной фотограмметрической процедурой, которая, как известно, включает такие операции, как выделение наземных ориентиров и определение их геодезических координат, определение связующих точек на стереопарах, развитие и уравнивание фототриангуляционной сети и т.д. Эти традиционные подходы не могут быть использованы для оперативной работы, так как основная обработка по определению геодезических координат проводится в этом случае на земле после полетов.
Используемые в настоящее время интегральные системы навигации, основанные на совмещении спутниковой навигации GPS и инерциальных навигационных датчиков (интегральные GPS/IMU комплексы), практически полностью свободны от недостатков, связанных со сложностью традиционного подхода. Можно считать, что все численные параметры, необходимые для окончательного геопозиционирования данных съемки, возникают одновременно с этими данными непосредственно в ходе съемки (см., например, ту же статью Е.М.Медведева).
Таким образом, прямое геопозиционирование в принципе позволяет решить задачу оперативного определения геодезических координат. Однако, что касается точности определения положения объектов, то простое геопозиционирование согласно статье «Интеллектуальные системы…» (http://www.hprobotics. com/statji_1.asp?id=15 от 31.03.2007) в настоящее время имеет точность 30 и 90 метров. Это возможно и достаточно для общей ориентации, но совершенно недостаточно для обнаружения малоразмерных объектов и точного определения их координат. Вместе с тем точность самих современных систем прямого геопозиционирования очень высокая. Так, интегрированная навигационная система POS AV 510 при работе ее спутниковой системы в дифференциальном режиме (см. http://www.geolidar.ru/facilities/equipment/posav/posav/tech.php) позволяет определять геодезические координаты места ее расположения с точностью до 0.5-2 м. Однако эти точности еще не гарантируют высокие точности определения геодезических координат объектов, обнаруженных на изображениях, полученных с помощью дистанционного зондирования. В частности, это относится к РСА, в которых радиолокационные изображения (РЛИ) являются результатом обработки сигналов, полученных на достаточно протяженном интервале синтезирования, на котором РСА осуществляет многократное зондирование, и при этом для каждого зондирования должна быть проведена оценка положения фазового центра антенны (ФЦА) РСА.
Для примера можно рассмотреть расчет геодезических координат в РСА. Сам принцип построения РЛИ (см., например, статью Брызгалова А.П., Карауловой Е.В., Хныкина А.В. «Аналого-цифровая обработка информации в радиолокаторах с синтезированной апертурой, использующих сверхширокополосные сигналы с линейной частотной модуляцией» в журнале «Цифровая обработка сигналов» №4 за 2004), при котором расчет изображения ведется, исходя из оценок положения ФЦА РСА при каждом зондировании на интервале синтезирования, обеспечивает достаточно жесткую привязку РЛИ к этим положениям. При этом ошибки в знании положения ФЦА не должны превышать величину линейного разрешения РСА (например, 1-2 м), что, в общем, согласуется с точностями указанных ранее современных навигационных систем, таких как система POS AV 510. Иначе РЛИ не сформируется. Но требуется еще обеспечить когерентное накопление сигналов за интервал синтезирования. Это обычно достигается применением алгоритмов самофокусировки (см., например, книгу Кондратенкова Г.С. и Фролова А.Ю. «Радиовидение». М.: «Радиотехника», 2005 г.). Однако можно показать, что если на интервале синтезирования (примерно по времени это составляет 1 и более секунд полета носителя) в ошибке оценки положения ФЦА РСА есть даже небольшая коррелированная составляющая, то это может привести к таким ошибкам в определении геодезических координат обнаруженного на РЛИ объекта, которые значительно (на порядки) превосходят ошибки НС. А наличие коррелированной составляющей в ошибках навигации, в общем случае, может быть обусловлено как характером навигационных данных и их обработки, так и самим методом построения РЛИ.
Из датчиков и формирователей изображений - средств авиационного дистанционного зондирования - большинство датчиков и формирователей, кроме РСА, имеют небольшую дальность видения и сильно зависят от условий работы: времени суток, состояния погоды и пр. Большинство этих датчиков не могут работать в сложных погодных условиях. Радиолокаторы прямого зондирования (без синтезирования апертуры) имеют малое разрешение по азимуту.
Поэтому из известных аналогов в качестве прототипа выбран способ дистанционного зондирования, изложенный, например, в приведенной ранее книге Кондратенкова Г.С. и Фролова А.Ю. «Радиовидение». М.: «Радиотехника», 2005 г., основанный на использовании РСА и НС, установленных на одном ЛА, например, на самолете. В качестве НС возможно применение интегрированной системы навигации типа GPS/IMU (см. приведенную ранее статью Е.М. Медведева). В соответствии с указанной книгой Кодратенкова Г.С и Фролова А.Ю., сначала в соответствии с поставленной задачей определяется искомый объект и формируются предварительные данные о его координатах: предполагаемые координаты и оценки ошибок при определении этих координат. Исходя из этих данных, определяют траекторию полета носителя и зону лоцирования для РСА, где может находиться искомый объект. Затем носитель выводят на заданную траекторию полета и осуществляют с помощью РСА зондирование определенной ранее зоны лоцирования с одновременным определением с помощью НС и запоминанием пространственного положения ФЦА РСА при каждом зондировании, например, его геодезических координат. По результатам лоцирования, используя координаты ФЦА, осуществляют формирование РЛИ заданной зоны лоцирования. Обычно это РЛИ выводят на экран оператора РСА. Но в любом случае РЛИ строят в некоторой экранной системе координат, связанной с координатами ФЦА РСА на интервале зондирования, необходимого для формирования данного РЛИ. Оператор РСА по РЛИ, выведенному, например, на экран РСА, или вычислительная система РСА в соответствии с реализованным в ней специальным алгоритмом обнаруживают на этом РЛИ объект, проводят его распознавание и определяют положение объекта на РЛИ, то есть в экранной системе координат. Далее осуществляют привязку экранной системы координат к геодезическим координатам, например, с помощью НС или путем оценки координат объекта с известными координатами, или другим способом, а затем определяют геодезические координаты искомого объекта.
Современные РСА позволяют получать РЛИ с высоким (например, до 10 см) разрешением, что в принципе дает возможность увидеть и различить (т.е. обнаружить и распознать) даже малоразмерные объекты. Однако увеличение разрешения серьезно усложняет задачу оперативного обнаружения объекта.
Во-первых, при этом, как правило, увеличивается темп вычисления строки РЛИ и увеличивается объем вычислений. Темп формирования строки РЛИ, например, при работе в реальном времени определяется временем прохождения носителем участка пути, соответствующего линейному разрешению РСА вдоль траектории движения носителя. А увеличение объема вычислений связано также с необходимостью увеличения синтезированной апертуры. Действительно, если для простоты изложения пренебречь кривизной земли и считать, что носитель РСА совершает прямолинейное движение с постоянной скоростью (и на постоянной высоте) вдоль оси Y, а ось Х перпендикулярна ей (и горизонтальна), то в этом случае линейное разрешение локатора бокового обзора вдоль оси Y («по азимуту») определяется выражением:

где Хоб - дальность до лоцируемого участка (объекта) местности относительно траектории полета носителя, Dсинт - протяженность синтезируемой апертуры, λ - длина волны зондирующего сигнала РСА. Из выражения (1) следует, что для увеличения разрешения синтезированная апертура должна быть увеличена. А это приводит к увеличению числа зондирований, которые должны быть использованы при формировании одной строки РЛИ, то есть существенно возрастает объем вычислений при ее формировании. Указанные причины практически не позволяют на данный момент реализовывать оперативное формирование РЛИ и уверенное оперативное обнаружение малоразмерного объекта.
С другой стороны, в соответствии с (1) увеличением линейного разрешения РСА вдоль траектории полета его носителя, как уже отмечалось ранее, связано, как правило, с уменьшением длины волны λ зондирующего сигнала, то есть с увеличением его несущей частоты. Так, в современной РСА LYNX APY-8 (см., например. Lynx: A high-resolution synthetic aperture radar. S.I.Tsunoda F. Pace, J. Stence, M. Woodring. General Atomics. PO Box 85608, San Diego, CA, 92121-5608. W.H.Hensley, A.W.Doerry, B.C.Walker. Sandia National Laboratories. PO BOX5800, MS 0529, Albuquerque, NM, 87185-0529), в которой обеспечивается разрешение до 10 см, используется частота порядка 16.7 ГГц. Но на этих частотах отражения от местности (леса, поля и пр.) значительны, появляются множества деталей, и задача обнаружения искомого объекта сопоставима с задачей обнаружения «иголки в стоге сена». Это противоречие частично решается за счет предварительных данных, выдаваемых на РСА. Однако на практике точности предварительных данных, существующие вычислительные средства и возможности оператора как основного звена в цепи обнаружения и распознавании объекта не позволяют, как правило, надежно обеспечить решение задачи оперативного обнаружения и идентификации объектов, особенно малоразмерных.
Кроме того, как уже отмечалось ранее, результирующая точность определения геодезических координат обнаруженных объектов остается низкой даже при использовании совместно с РСА навигационных датчиков с высокой точностью определения их собственных координат.
Задача данного изобретения - существенно повысить оперативность обнаружения и распознавания малоразмерных объектов и точность определения их геодезических координат с помощью РСА, установленного на подвижном носителе, и прямого геопозиционирования положения антенны РСА с помощью НС, установленной на том же носителе.
Сущность изобретения состоит в том, что в способе обнаружения и определения координат искомого объекта, включающем использование РСА, установленного на ЛА, формирование предварительных данных об искомом объекте и его координатах, определение на основе этих данных и характеристик выбранных ЛА и РСА траектории полета носителя и зоны лоцирования для РСА, выход ЛА на заданную траекторию и лоцирование этой зоны с помощью РСА с одновременным определением с помощью НС ЛА и запоминанием пространственного положения ФЦА РСА при каждом зондировании, например, их геодезических координат, получение по выходу приемника РСА радиоголограмм (РГ) и их запоминание, формирование радиолокационного изображения (РЛИ) заданных зон лоцирования за счет обработки РГ за интервал синтезирования с учетом пространственных положений ФЦА и использования методов самофокусировки, обнаружение на этом РЛИ объекта, его распознавание и определение его положения в экранной системе координат с последующим определением геодезических координат объекта, используют К≥2 каналов РСА, работающих в разных частотных диапазонах, причем разрешение в канале с наибольшей несущей частотой согласовывают с размерами обнаруживаемого объекта, НС выбирают из условия, что ошибки НС при определении положений ФЦА РСА не превосходят разрешения РСА, а при лоцировании сначала проводят первичное обнаружение объекта в зоне лоцирования, выбирая для этого каналы РСА с высокой контрастностью отраженного от искомого объекта сигнала на фоне местности, и результаты первичного обнаружения используют в канале РСА с высокой несущей частотой, в котором формируют фрагменты детальных РЛИ, число, положение и размеры которых соответствуют данным первичного обнаружения, и на этих фрагментах обнаруживают, распознают и идентифицируют искомый объект и определяют его местоположение в экранной системе координат и далее пересчитывают координаты объекта в геодезические координаты, при этом привязку экранной системы координат к геодезической системе координат осуществляют, исходя из оценок геодезических координат ФЦА РСА этого канала.
В целях увеличения эффективности способа и создания условий для частичного аппаратного интегрирования каналов РСА в предлагаемом способе по результатам первичного обнаружения объекта принимают решение о дополнительном лоцировании участков местности, соответствующих данным первичного обнаружения, после чего совершают носителем маневр, в результате которого выводят носитель на траекторию, при которой обеспечивают лоцирование указанных участков местности в режиме бокового обзора, осуществляют зондирование этих участков каналом с высоким разрешением, получают РГ и оценивают пространственные положения ФЦА РСА при зондировании, на основании этих данных формируют требуемые фрагменты РЛИ и по ним проводят обнаружение, распознавание и идентификацию искомого объекта и определяют его геодезические координаты, причем зоны лоцирования и параметры зондирования и формируемых РЛИ выбирают с учетом результатов первичного обнаружения и смены траектории носителя.
В РСА зона лоцирования формируется с учетом многих факторов, в том числе исходя из технических возможностей РСА и ЛА и траектории его полета. Эта зона может значительно превышать зону, требуемую, исходя из предварительных данных о положении искомого объекта. Поэтому на РЛИ, формируемых в каналах первичного обнаружения, дополнительно формируют зону поиска, исходя из предварительных данных о координатах искомого объекта и выбранной зоны лоцирования, и первичное обнаружение объекта осуществляют в этой зоне.
При обнаружении и определении координат объекта, связанного по своему положению с источником радиоизлучений (ИРИ) с известными отличительными свойствами, формирование предварительных данных о координатах искомого объекта, а затем выбор траектории полета ЛА, зон лоцирования и поиска для первичного обнаружения осуществляют путем обнаружения и определения координат ИРИ с помощью пассивного локатора, установленного на ЛА. Для повышения точности определения координат это делают, например, с использованием синтезированных пассивных антенных систем (СПАС), причем траекторию ЛА и время синтезирования выбирают с учетом возможности получения максимальной протяженности эффективной апертуры СПАС.
В целях увеличения точности оценки положения ИРИ эту оценку и соответствующее уточнение зоны поиска объекта в канале первичного обнаружения РСА осуществляют и после определения зоны лоцирования, выхода РСА в режим активного зондирования этой зоны и формирования ее РЛИ, а первичное обнаружение осуществляют после уточнения зоны поиска.
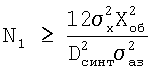
В целях снижения ошибок при определении координат объекта и обеспечения требуемой точности за время синтезирования апертуры РСА с помощью НС ЛА многократно формируют взаимно независимые оценки положений ФЦА РСА, а их число N1 за интервал синтезирования выбирают из условия:
 ,
,
где  - дисперсия ошибок в знании положения ФЦА РСА, оцениваемая по нормали к траектории движения носителя, Xoб - дальность до лоцируемого участка местности, Dсинт - протяженность синтезируемой апертуры,
- дисперсия ошибок в знании положения ФЦА РСА, оцениваемая по нормали к траектории движения носителя, Xoб - дальность до лоцируемого участка местности, Dсинт - протяженность синтезируемой апертуры,  - дисперсия допустимой ошибки в линейной привязке РЛИ к геодезическим координатам вдоль траектории ЛА (в азимутальном направлении).
- дисперсия допустимой ошибки в линейной привязке РЛИ к геодезическим координатам вдоль траектории ЛА (в азимутальном направлении).
С целью более точной оценки положений ФЦА на интервале синтезирования и, соответственно, более точной оценки положения объекта в геодезических координатах участок траектории движения антенны РСА, включающий интервал синтезирования, описывают некоторой функцией с неизвестными параметрами, далее, основываясь на навигационных данных о положении ФЦА РСА на этом участке, проводят оценку этих параметров, например по методу максимального правдоподобия, и, исходя из этой функции и ее параметров, уточняют положение ФЦА РСА в каждый момент зондирования на интервале синтезирования и затем определяют координаты обнаруженных по РЛИ объектов.
При наличии на лоцируемом участке местности отдельных малоразмерных объектов с большой отражающей способностью после проведения на интервале синтезирования Nсинт зондирований, необходимых для формирования одной строки РЛИ, выявляют один или несколько наиболее интенсивных сигналов, отраженных от объектов на лоцируемой местности и принятых РСА, оценивают изменения фаз этих сигналов за Nсинт зондирований и отклонения этого изменения от ожидаемого при траектории движения ФЦА РСА, соответствующей данным НС, аппроксимируют эти отклонения задаваемой, например, линейной функцией с неизвестными параметрами, оценивают эти параметры, например с использованием метода максимального правдоподобия, и, исходя из этого, корректируют оценки положения ФЦА РСА, полученные по данным НС, и, исходя из этих оценок, определяют координаты обнаруженных по РЛИ объектов.
Для частичной компенсации ошибок в оценке положения объекта из-за неточного знания положения ФЦА самофокусировку РСА при формировании РЛИ осуществляют путем ввода корректирующей фазы в комплексные огибающие сигналов для каждого i-го зондирования, причем сначала самофокусировку проводят в длинноволновом канале, определяя его корректирующую фазу ψiкор_дв, а затем - в коротковолновом канале, при этом в коротковолновом канале сначала проводят оценку самофокусировки при двух предварительно вводимых в этом канале корректирующих смещениях сигнала на τ1корi и τ2корi, согласованных, например, с точностью до временной дискретизации сигнала в этом канале, с величинами соответственно ψiкор_дв/(2πf0) и [ψiкор_дв-2sign(ψiкор_дв)π]/(2πf0), где sign(x) означает операцию взятия знака х, a f0 - несущая частота зондирующего сигнала, и для самофокусировки выбирают то смещение, при котором интенсивность сигнала после самофокусировки больше, а соответствующее корректирующее смещение τ1корi или τ2корi используют для коррекции оценки положения ФЦА РСА при i-м зондировании и, исходя из этого, осуществляют расчет геодезических координат обнаруженных по РЛИ объектов.
В целях увеличения точности определения геодезических координат объекта, упрощения требований к НС и улучшения характеристик обнаружения объекта и его распознавания после зондирования полученной, исходя из предварительных данных, зоны лоцирования, обнаружения в этой зоне искомого объекта, его идентификации и определения его координат проводят дополнительное зондирование этого объекта один и более раз при смене ракурса зондирования за счет изменения траектории носителя по азимуту, причем при каждом новом лоцировании, исходя из результатов предыдущих зондирований и выбранной для этого зондирования траектории носителя, уточняют зоны лоцирования и поиска, осуществляют обнаружение и идентификацию искомого объекта и оценку его координат, а результирующую оценку геодезических координат объекта определяют по результатам усреднения оценок координат объекта, полученных при разных ракурсах его лоцирования, с учетом ошибок этих оценок по разным координатам.
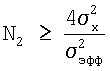
Для достижения наибольшей эффективности смену ракурса выполняют относительно первого зондирования на угол 65°<α<115°, a число N2 независимых оценок положений ФЦА РСА за интервал синтезирования в этом случае выбирают из условия:
 ,
,
где  - дисперсия допустимой ошибки в линейной привязке РЛИ к геодезическим координатам.
- дисперсия допустимой ошибки в линейной привязке РЛИ к геодезическим координатам.
Технический результат применения предлагаемого способа заключается, в первую очередь, в возможности поэтапного и, вместе с тем, оперативного, то есть уже в процессе лоцирования или с минимальной задержкой, решения задачи поиска и обнаружения искомого объекта, его распознавания и определения местоположения при использовании многоканального многочастотного РСА. При этом используют различие отражающих свойств от фона (леса, поля и пр.) и обнаруживаемых объектов на разных частотах и возможности взаимодействия операторов разных каналов. Как правило, в низкочастотном канале с относительно малым разрешением, но с высокой контрастностью искомого объекта относительно окружающей местности вероятность пропуска этого объекта резко снижается, хотя в силу сложности правильного распознавания вероятность ложных тревог может быть достаточно велика. Но все же использование низкочастотного канала для первичного обнаружения объекта и передача полученных данных в канал с высоким разрешением существенно (на порядки) снижает нагрузку на высокочастотный канал с высоким разрешением. В этом канале на базе его РГ с некоторой задержкой относительно первичного обнаружения формируют РЛИ с высоким разрешением тех фрагментов местности, которые были определены при первичном обнаружении. При анализе этих фрагментов в силу высокого разрешения, а следовательно, и высокой информативности и вероятности правильного распознавания требуемого объекта оперативно снимаются ложные тревоги. Из всех выделенных при первичном обнаружении фрагментов РЛИ в канале с высоким разрешением остается только искомый, что позволяет оперативно обнаруживать объект и с высокой точностью определить его местоположение. При выполнении ряда требований к НС, в частности, если НС определяет положение ФЦА РСА с ошибками, не превосходящими разрешения РСА, такой способ позволяет, во-первых, сформировать РЛИ, достаточные для обнаружения и распознавания объектов заданного типа, во-вторых, провести обнаружение и распознавание искомого объекта, а в-третьих, обеспечить привязку этих РЛИ к геодезическим координатам, то есть обеспечить определение геодезических координат обнаруженного объекта. Следует подчеркнуть, что во многих случаях использование только канала с высоким разрешением практически исключает возможность оперативного обнаружения малоразмерных объектов.
Как правило, возможный диапазон изменения параметров зоны лоцирования для РСА определяется его техническими характеристиками и условиями работы. Например, минимальный размер зоны лоцирования, как правило, ограничен и он может значительно превышать зону поиска, обусловленную предварительными данными о координатах искомого объекта. В этом случае дополнительный технический результат получают за счет формирования зон поиска на РЛИ в каналах первичного обнаружения. Первичное обнаружение объекта осуществляют в этой зоне, которая может быть значительно меньше зоны лоцирования РСА, что существенно увеличивает оперативность и улучшает характеристики обнаружения.
Дополнительный технический результат может быть получен, если обнаруживаемый объект связан с радиоизлучением известного вида. Это излучение может быть использовано для обнаружения объекта и формирования предварительных данных о его местоположении пассивными методами, причем эффективность такого использования источника может быть значительно повышена, если пассивная система обнаружения и определения координат ИРИ имеется на ЛА вместе с РСА и для увеличения точности определения координат ИРИ используют способ синтезирования пассивных антенных систем (СПАС). В этом случае обнаружение ИРИ осуществляют на достаточно больших дальностях и с достаточно высокой точностью, что позволяет заблаговременно формировать предварительные данные о координатах искомого объекта и оптимизировать траекторию полета ЛА. При этом траекторию ЛА выбирают, исходя как из получения максимальной протяженности эффективной апертуры СПАС до выхода РСА в режим активного зондирования и начала формирования РЛИ, так и оптимизации работы РСА.
Следует учитывать, что если зона лоцирования должна быть определена до начала зондирования этой зоны, то зону поиска можно корректировать и во время лоцирования этой зоны, и даже после этого. Более того, для формирования РЛИ необходимо, чтобы ЛА пролетел ту часть траектории, которая соответствует синтезированной апертуре, а поэтому обнаружение искомого объекта в зоне поиска может быть проведено и с некоторой задержкой, что, в общем случае, определяется временем хранения РГ и РЛИ. Это позволяет, в частности при формировании предварительных данных за счет работы ПЛ, продолжить его работу и после сформирования РЛИ, что повысит точность ПЛ, существенно уменьшит размеры зоны поиска, иногда в несколько раз, и приведет к значительному улучшению характеристик обнаружения.
Важный технический результат применения способа заключается также в том, что в нем оговаривается целый ряд действий и условий, обеспечивающих существенное повышение точности геодезической привязки обнаруженных объектов. Это и формирование взаимно независимых оценок положений ФЦА на интервале синтезирования, и выбор точности этих оценок и их количества в зависимости от требуемой точности определения положения искомого объекта. Важный вклад в повышение точности определения координат объекта дают предложенные способы обработки навигационных данных с использованием оценок изменения на интервале синтезирования фаз наиболее интенсивных отраженных сигналов, а также многоракурсное зондирование одних и тех же участков местности. Причем в случае изменения ракурса на угол, близкий к 90 градусам, многократно снижается требование по числу независимых замеров положений ФЦА РСА за интервал синтезирования.
Перечень чертежей
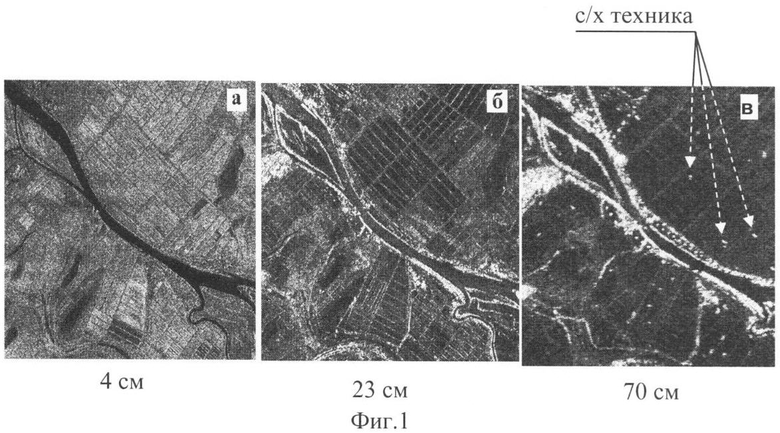
На фиг.1 приведены РЛИ местности и различных объектов на ней, включая, такие как сельскохозяйственная техника, в каналах с длиной волны 4 см, 23 см и 70 см.
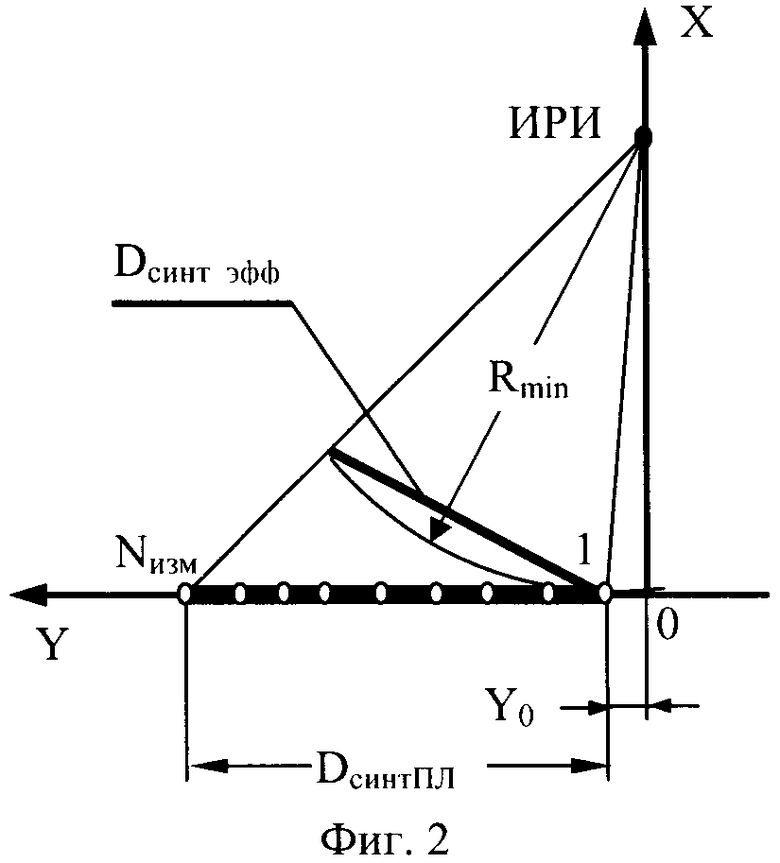
На фиг.2 поясняются понятия эффективная апертура СПАС Dсинтпл и Rmin Эффективная апертура СПАС может быть определена как хорда дуги радиусом Rmin, ограниченной сектором формирования СПАС.
На фиг.3 приведено формирование предварительных данных в виде эллипса ошибок ПЛ при определении координат ИРИ при работе ПЛ на интервале Dсинтпл, предшествующем работе РСА. На этой фиг. показаны полоса лоцирования РСА как полоса, соответствующая предварительным данным и техническим возможностям РСА, зона лоцирования как часть полосы, охватывающей зону возможных ошибок ПЛ, и зона поиска, соответствующая предварительным данным.
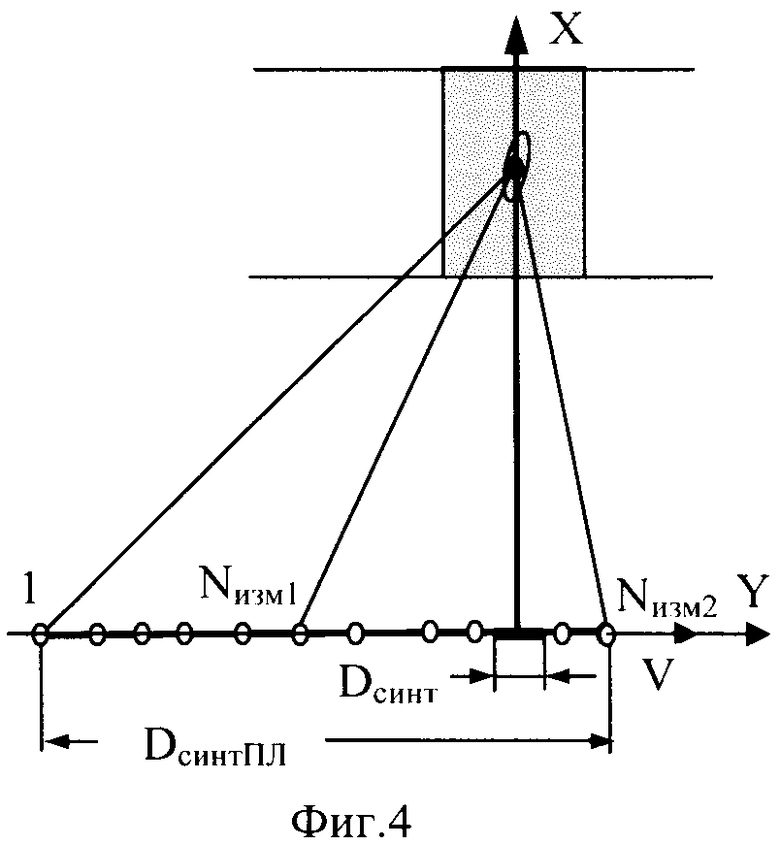
Фиг.4 поясняет уменьшение зоны поиска за счет продления интервала работы ПЛ Dсинтпл до окончания работы РСА по зондированию зоны лоцирования и формирования РЛИ.
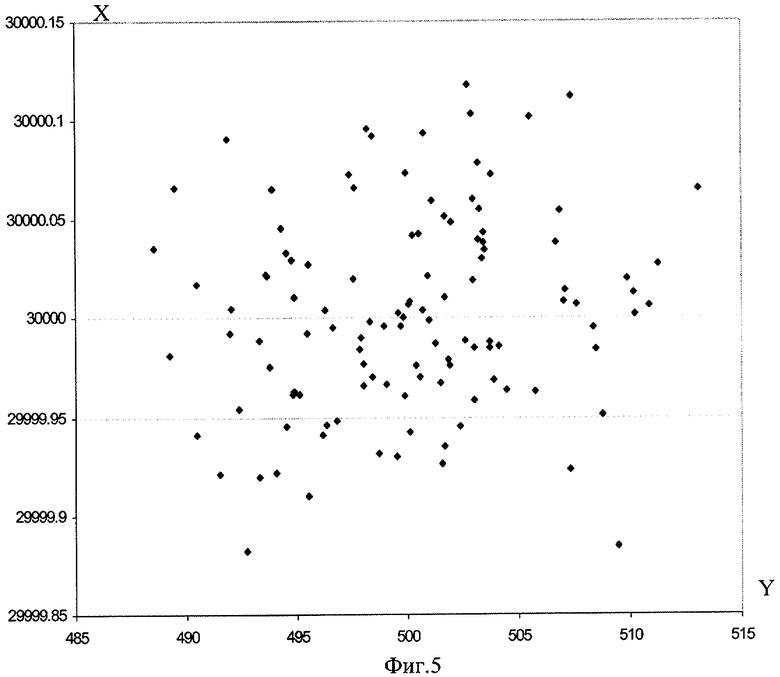
На фиг.5 приведены результаты численных расчетов (моделирования) оценки положения объекта, полученные для случая: R0=30 кm, Y0=500 м, Dсинт=1 км, N=100, σx=0.5 м.
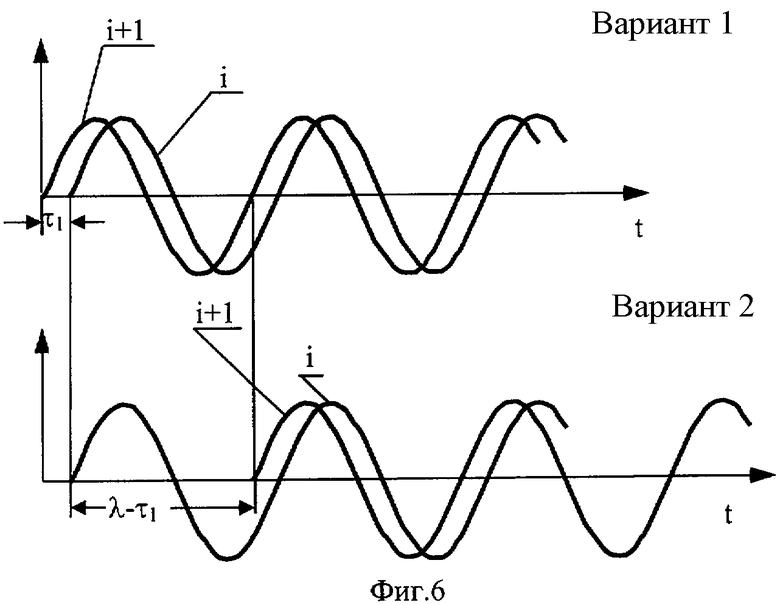
На фиг.6 проиллюстрирована неоднозначность при определении значения корректирующей фазы при самофокусировке.
Задача оперативного обнаружения задаваемых объектов и их распознавания очень сложна, так как информативность современных РСА очень велика и трудно оперативно разобраться в этом потоке информации. Например, для успешного обнаружения и распознавания малоразмерных разрешающей способности РСА в 1 м полоса лоцируемой местности может составлять, например, 4 км и более. То есть только в одной строке объектов требуется и реализуется на практике разрешение порядка 1 м и менее. Имеются РСА с разрешением 10 см. При РЛИ количество анализируемых элементов разрешения в этом случае равно 4000. При этом требуемый темп формирования строк, который определяется скоростью полета носителя и разрешением по азимуту, может составлять, например, 1 кГц. Трудно в этом потоке информации в виде РЛИ с указанным разрешением найти и идентифицировать требуемый объект. В настоящее время это, как правило, выполняет оператор, но возможности его очень ограниченны. Постепенно появляются автоматизированные системы, в том числе использующие алгоритмы предварительного отбора участков местности для их дальнейшего анализа оператором. Но практически сегодня задача решается только для частных ситуаций. Задача усложняется еще и тем, что в см-диапазоне, при котором достигается хорошее разрешение, высок уровень отражений от местности и сложно обнаружить объект при его слабой контрастности по отношению к фону.
Вместе с тем, контрастность РЛИ объекта по отношению к фону зависит, в том числе и от несущей частоты зондирующего сигнала РСА. Поэтому при наличии в РСА нескольких частотных каналов с разной контрастностью объектов на фоне окружающей местности в целях уменьшения вероятности пропуска искомого объекта и повышения оперативности и вероятности его правильного обнаружения и распознавания эту задачу решают в два этапа. Для первичного обнаружения используют каналы с высокой контрастностью. Как правило, это каналы с более низкой несущей частотой зондирующего сигнала. В некоторых случаях для первичного обнаружения используют каналы, в том числе и каналы с высокой несущей частотой, работающие в обзорном режиме, при котором формируется РЛИ с уменьшенным разрешением. Но в любом случае результаты первичного обнаружения используют в канале РСА с высокой несущей частотой, где разрешение максимально. В этом канале формируют один или несколько фрагментов детальных РЛИ с высоким разрешением, количество, положение и размеры которых соответствуют данным первичного обнаружения. Невысокое разрешение при первичном обнаружении и сложность распознавания при этом искомого объекта требуют для обеспечения низкой вероятности пропуска объекта проведения обнаружения при достаточно высоком уровне ложных тревог. Но даже при этом выбранные при первичном обнаружении участки местности, передаваемые для вторичного обнаружения, по суммарному числу элементов обнаружения в них могут быть на несколько порядков меньше начальной зоны лоцирования при первичном обнаружении. Высокое разрешение во фрагментах, используемых на втором этапе обнаружения, позволяет с высокой вероятностью обнаруживать, распознавать и идентифицировать искомый объект.
Во многих случаях при априорном задании искомого объекта и местности, на фоне которой он должен быть обнаружен, можно заранее до начала зондирования задаваемого участка рассчитать ожидаемую контрастность в различных частотных каналах. Например, контрастность таких объектов, как сельскохозяйственная техника на фоне пашни или нескошенного поля в каналах 4- и 70-сантиметровых диапазонах сильно различается: они неразличимы в 4-см канале, но хорошо видны в 70-см канале, что подтверждается фиг.1. Поэтому первичное обнаружение таких объектов следует делать в длинноволновом канале. На его РЛИ выбираются участки местности, где предположительно лоцируются заданные объекты, а подробный анализ и окончательное обнаружение и распознавание проводится с помощью фрагментов детальных РЛИ см-диапазона выбранных участков местности. Высокое разрешение в этом канале позволяет отбросить ложные тревоги первичного обнаружения и найти и распознать искомый объект.
Для оперативного обнаружения очень важны предварительные данные о положении искомого объекта. Если носитель РСА оборудован также пассивным локатором (ПЛ), то при обнаружении и определении координат объекта, связанного по своему положению с источником радиоизлучений (ИРИ) с известными отличительными свойствами, формирование предварительных данных можно осуществить с помощью этого ПЛ, который обнаруживает этот ИРИ, идентифицирует его, например, по характеру излучаемого сигнала и определяет его координаты. При использовании РСА и ПЛ одного ЛА можно оптимизировать траекторию полета носителя, исходя как из задач ПЛ, так и РСА, и, тем самым, существенно повысить точность предварительных данных о положении искомого объекта при ПЛ и улучшить характеристики обнаружения для РСА.
Движение носителя по хорошо известной траектории, что необходимо для нормальной работы РСА бокового обзора, позволяет применить в ПЛ синтезированные пассивные антенные системы (СПАС), в которых используется пространственно-временная когерентность сигнала ИРИ и его обработки в ПЛ (см., например, книгу П.А. Бакулева «Радиолокационные системы», изд-во «Радиотехника», М., 2004 г.). В этом случае траекторию ЛА и время синтезирования выбирают, исходя из получения максимального соотношения протяженности эффективной апертуры СПАС Dсинтпл и Rmin (см. фиг.2) для ПЛ и оптимизации условий для работы РСА. При этом эффективная апертура СПАС может быть определена как хорда дуги радиусом Rmin, ограниченной сектором работы СПАС. При обнаружении ИРИ и его идентификации с помощью ПЛ траекторию носителя выбирают с таким расчетом, чтобы увеличить эффективную протяженность СПАС и соотношения Dсинтпл/Rmin. Для этого в простейшем случае, в соответствии с фиг.3, ПЛ работает до начала работы РСА, совершая Nзам1 сеансов приема сигнала ИРИ. При этом следует учитывать время, необходимое для вычисления зоны лоцирования и требуемых параметров РСА, и необходимость в РСА бокового обзора для формирования строки РЛИ смещения начала ее зондирования на Dсинт/2 относительно траверза этой строки. По результатам работы ПЛ формируются предварительные данные, на основе которых определяются полоса лоцирования (см. фиг.3) и зона лоцирования, как часть полосы, охватывающая зону возможных ошибок определения координат при формировании предварительных данных. При этом полоса лоцирования должна соответствовать техническим возможностям РСА. Ошибки ПЛ обычно характеризуются эллипсом ошибок (см., например, книгу «Теоретические основы радиолокации». / Под ред. Я.Д.Ширмана, изд-во «Сов.радио», М.: 1978 г., стр.504), и он определяет зону поиска на сформированном РЛИ.
Задачу РСА можно существенно упростить, если изменить маршрут носителя с целью уменьшения зоны лоцирования. Например, по данным ПЛ носитель осуществляет разворот и летит вдоль длинной оси эллипса ошибок ПЛ на удалении, оптимальном для работы РСА. Полоса лоцирования сужается, и зона лоцирования приближается к зоне поиска, хотя, как уже отмечалось, сохраняется некоторое различие между двумя зонами, определяемое техническими характеристики РСА, такими как разрядность АЦП, количество обрабатываемых выборок по дальности в спецвычислителе, осуществляющем БПФ при обработке входного сигнала, и пр.
Следует отметить, что если зона лоцирования должна быть определена до начала зондирования и формирования РЛИ, так как это определяет начало зондирования и параметры РСА, то зона поиска может уточняться в процессе работы РСА и даже после сформирования РЛИ. Это позволяет продолжить работу ПЛ и на этапе работы РСА, и даже после прохождения РСА требуемой зоны лоцирования. В этом случае число сеансов приема сигнала ИРИ может быть увеличено до Nзам2, как это показано на фиг.4. Точность определения координат ИРИ значительно увеличивается, так как существенно возрастает эффективная протяженность СПАС. Используя сформированное РЛИ с некоторой задержкой, уточняя на нем зону поиска по данным, полученным ПЛ в результате этой задержки, можно существенно повысить характеристики оперативного обнаружения, распознавания и идентификации заданного объекта.
Требования к НС, определяющей координаты ФЦА при каждом зондировании, обусловлены двумя факторами. Во-первых, точности определения координат ФЦА должны обеспечивать формирование РЛИ, которое формируется за счет суммирования отраженных сигналов от каждого элемента разрешения (каждого объекта), взятых в разные периоды зондирования на интервале синтезирования. При этом должны быть учтены изменения задержек этих сигналов и их доплеровских частот в соответствии с изменением дальности и угла визирования этого элемента на интервале синтезирования. Для их суммирования необходимо, чтобы эти сигналы совпадали или хотя бы частично перекрывались. В последнем случае простое суммирование дает некогерентное накопление, а ввод, например за счет самофокусировки корректирующих фаз, приводит к когерентному суммированию этих сигналов. Только в этом случае может быть сформировано РЛИ лоцируемой местности. Это означает, что ошибки в знании положения этого элемента при всех зондированиях (а вернее их некоррелированная составляющая) не должны превышать примерно половины разрешения по каждой оси координат, связанной с РЛИ.
Другим фактором, определяющим требования к НС, является необходимость обеспечения высокой точности оценки геодезических координат обнаруженного объекта. Причем требования двух названных факторов не совпадают. Например, на качестве РЛИ не сказывается наличие систематической ошибки в знании положений ФЦА, когда оценочная траектория перемещения ФЦА на интервале синтезирования сдвинута параллельно истинной траектории. Но с точки зрения оценки положения объекта эта ошибка недопустима, так как не может быть компенсирована и переходит непосредственно в ошибку определения координат объекта. Коррелированная составляющая ошибок в оценке положений ФЦА, то есть ошибка, плавно изменяющаяся на интервале синтезирования, также нежелательна, так как приводит к большим ошибкам в положении объекта в азимутальной плоскости (вдоль траектории носителя). Таким образом, требуются независимые оценки координат ФЦА, причем число их на интервале синтезирования зависит в основном от  - дисперсии ошибок в знании положения антенны РСА, оцениваемых по нормали к траектории движения носителя, от Хоб - дальности до лоцируемого участка местности, от Dcинт - протяженности синтезируемой апертуры РСА и дисперсии
- дисперсии ошибок в знании положения антенны РСА, оцениваемых по нормали к траектории движения носителя, от Хоб - дальности до лоцируемого участка местности, от Dcинт - протяженности синтезируемой апертуры РСА и дисперсии  допустимой ошибки в положении объекта вдоль траектории полета носителя.
допустимой ошибки в положении объекта вдоль траектории полета носителя.
Ошибки в определении положения обнаруженного объекта по двум основным осям эллипсоида ошибок - по осям Y и Х - можно оценить, например, для точечного объекта, если положить, что истинные положения ФЦА РСА на интервале синтезирования лежат на одной прямой, совпадающей с осью Y. Ошибки в знании ФЦА на интервале синтезирования в среднем можно аппроксимировать смещением этой прямой относительно истинной параллельно самой себе на ΔХ и ее разворотом относительно оси Y на угол α, примерно равный, в виду его малости, tg(α). При этом смещение ΔХ эквивалентно систематической ошибке и приводит к смещению по оси X, а наклон антенны на угол α - влиянию коррелированной ошибки, что приводит к смещению РЛИ по оси Y.
Можно применить метод максимального правдоподобия для определения алгоритмов вычисления ΔХ и α и матрицу Фишера для нахождения дисперсий этих оценок. В этом случае оценку ошибок привязки положения точки РЛИ к истинному положению антенны при наличии случайных ошибок в знании положения этой антенны (в N точках), изменяющихся по нормальном закону, можно получить аналитически, если аппроксимировать эти ошибки изменением положения линейки: ее смещением Х0 по оси Х и изменением наклона на угол α относительно оси Y. Логарифм функции правдоподобия для данного случая (с точностью до слагаемых, несущественных с точки зрения оценки ошибок привязки) можно записать в виде:

где Х - вектор оценок хi положения ФЦА на i-м такте по оси X, причем среднее значение хi равно 0, а  - дисперсия этих оценок, b=tg(α), а YR - шаг между точками линейки синтезированной антенны. Полагаем, что ошибок в знании положения антенны по оси Y нет, так как можно показать, что влияние их незначительно.
- дисперсия этих оценок, b=tg(α), а YR - шаг между точками линейки синтезированной антенны. Полагаем, что ошибок в знании положения антенны по оси Y нет, так как можно показать, что влияние их незначительно.
В соответствии с (2) матрица Фишера, которая определяется средним значением вторых частных производных L по неизвестным параметрам Х0 и b со знаком минус, имеет вид:

Определитель матрицы J
 ,
,
и, учитывая, что дисперсия наиболее эффективной оценки i-го параметра равна

можно получить, что дисперсия наиболее эффективной оценки Х0 определяется формулой:

а дисперсия наиболее эффективной оценки b

Исходя из эффективной оценки b, можно найти ошибку смещения РЛИ по азимуту на дальности R0

Для примера, при R0=30 км, Dсинт=1км, N=100 и σх=0.5 м в соответствии с (5)…(7) σаз=5 м, а σэфф х=0.1 м.
Эти же ошибки привязки РЛИ к траектории антенны могут быть оценены численным методом. Полагаем, как и ранее, что ЛА летит по прямой, проходящей вдоль оси Y при Х=0. При этом для синтезирования одной строки РЛИ локатор осуществляет N зондирований. В каждой точке зондирования с координатами [хi; уi] (i=1, 2,…, N) НС ЛА с некоторой ошибкой определяет положение [хi *; уi *], и из этого делается расчет расстояния Ri до заданной точки РЛИ [xt; уt]. Требуется, исходя из Ri и координат с ошибкой [xi *; уi *], вычислить положение лоцируемой точки РЛИ [хt *; уt *].
Координаты с ошибкой распределены по нормальному закону [xi *=N(xi, σx); yi *=N(yi, σу)]. Координаты заданной точки РЛИ [xt *; yt *] вычисляем по методу наименьших квадратов:
argmin(S(xt *, yt *)), где S=Σi=1..N(Ri-Ri *)2,
где Ri * расстояние от [хi *; уi *] до [xt *; уt *].
Проведены численные расчеты для случая, рассмотренного ранее:
R0=30 км, Dсинт=1 км, N=100, σx=0.5 м. На фиг.5 приведены оценки положения объекта, полученные при его истинном положении Y0=500 м.
Как видно из фиг., σРЛИу≈5 м и σРЛИх=0.05 м.
Таким образом, и аналитический, и численный анализ влияния случайных некоррелированных между собой ошибок дают приблизительно один и тот же результат. При этом случайное смещение по оси Х в среднем равно нулю, а дисперсия этого смещения примерно в N раз меньше дисперсии оценки положения ФЦА  . Учитывая, что сама дисперсия
. Учитывая, что сама дисперсия  не может быть большой (иначе не сформируется РЛИ), то смещение РЛИ будет незначительным. Средние значения tg(α) и ошибки по азимуту также равны 0, а дисперсия этой ошибки может быть уменьшена до требуемого значения за счет выбора R0, Dсинт и N.
не может быть большой (иначе не сформируется РЛИ), то смещение РЛИ будет незначительным. Средние значения tg(α) и ошибки по азимуту также равны 0, а дисперсия этой ошибки может быть уменьшена до требуемого значения за счет выбора R0, Dсинт и N.
Как видно из приведенного выше, при оценке координат обнаруженного объекта преобладает азимутальная ошибка. Поэтому можно сделать вывод, что для достижения требуемой точности определения координат объекта НС носителя за время синтезирования апертуры РСА должна многократно формировать взаимно независимые оценки положений ФЦА РСА, а их число N1 за интервал синтезирования при этом выбирают из условия:
 .
.
Требования к НС можно значительно снизить, а точность определения координат объекта существенно повысить, если зондирование полученной, исходя из предварительных данных, зоны лоцирования проводят как минимум дважды при смене ракурса зондирования за счет изменения траектории ЛА по азимуту. Важно, чтобы смена ракурса была, по возможности, близка к 90 градусам. При каждом новом лоцировании, исходя из данных, полученных при предыдущих зондированиях, и выбранной для нового лоцирования траектории носителя, уточняют лоцируемую зону и зону поиска, осуществляют обнаружение и идентификацию искомого объекта и определение его координат, а результирующие геодезические координаты объекта находят путем усреднения координат, полученных при каждом ракурсе с учетом дисперсий оценок этих координат по каждой координате. В простейшем случае, например, при смене ракурса на 90 градусов, учитывая, что дисперсия оценок координат объекта вдоль траектории носителя (по азимуту) значительно, на порядки, превышает дисперсию оценок его координат по дальности (по нормали к траектории носителя), можно использовать от каждого ракурса только оценки координат по дальности и вообще не учитывать оценки по азимуту.
Кроме того, число N2 независимых оценок положений ФЦА РСА за интервал синтезирования при изменении ракурса на угол α, близкий к 90 градусам, выбирают из условия
 ,
,
что следует из выражения (5). При этом  - дисперсия ошибок в знании положения ФЦА РСА, оцениваемых по нормали к траектории движения носителя при каждом ракурсе зондирования. Полагается, что дисперсия ошибок в знании положения ФЦА вдоль траектории носителя мала, по крайней мере, не превышает
- дисперсия ошибок в знании положения ФЦА РСА, оцениваемых по нормали к траектории движения носителя при каждом ракурсе зондирования. Полагается, что дисперсия ошибок в знании положения ФЦА вдоль траектории носителя мала, по крайней мере, не превышает  , и в этом случае влияние этих ошибок также мало. Можно показать, что при меньшем изменении ракурса ошибка по нормали к траектории возрастает пропорционально 1/cosα, и, если, исходя из практики, положить, что допустимо возрастание этой ошибки на 10%, то должно выполняться условие 65°<α<115°.
, и в этом случае влияние этих ошибок также мало. Можно показать, что при меньшем изменении ракурса ошибка по нормали к траектории возрастает пропорционально 1/cosα, и, если, исходя из практики, положить, что допустимо возрастание этой ошибки на 10%, то должно выполняться условие 65°<α<115°.
Данные НС могут быть улучшены путем их дополнительной обработки, исходя из особенности задач определения геодезических координат обнаруженного объекта. Как уже отмечалось, для формирования РЛИ требуются текущие оценки положений ФЦА, а корректировка оценки положения объекта проводится после обнаружения этого объекта и даже может быть проведена с некоторой задержкой относительно момента обнаружения. В этом случае для оценки траектории перемещения ФЦА на интервале синтезирования можно использовать не только данные НС за этот интервал и предшествующие ему данные, но и последующие данные. При этом траекторию ФЦА на интервале описывают некоторой функцией с неизвестными параметрами и, основываясь на навигационных данных о положении ФЦА РСА на этом участке, проводят оценку этих параметров, например по методу максимального правдоподобия. Далее, исходя из этой функции и ее параметров, уточняют положение ФЦА РСА в каждый момент зондирования на интервале синтезирования и затем уточняют координаты обнаруженных по РЛИ объектов.
С учетом характера действия автопилота при задании прямолинейного равномерного движении носителя его истинную траекторию, как и траекторию ФЦА РСА, можно описать, например, суммой нескольких синусоид с неизвестными частотами, амплитудами и начальными фазами и некоторой прямой. Записав, исходя из выбранной функции и оценок координат ФЦА, полученных НС, логарифм функции правдоподобия определяют неизвестные параметры этой функции, например, по методу максимального правдоподобия. В некоторых ситуациях указанный подход может существенно уменьшить систематическую и случайную составляющие ошибок в определении положений ФЦА на интервале синтезирования и, как результат, ошибки в определении координат объекта.
Ошибки НС могут быть частично скомпенсированы за счет анализа отраженных сигналов на интервале синтезирования. Во многих случаях, например, при самофокусировке, при проведении зондирований, необходимых для формирования РЛИ, выявляют один или несколько наиболее интенсивных сигналов, отраженных от объектов на лоцируемой местности и принятых РСА. По этим сигналам проводят самофокусировку, подбирая их фазы (или задержки) и добиваясь их когерентного суммирования за Nсинт зондирований на интервале синтезирования. Эти сигналы используют также для коррекции данных НС. Для этого оценивают изменения фазы выбранного сигнала (сигналов) за N зондирований и отклонения этого изменения от ожидаемого, исходя из расчетной траектории движения ФЦА РСА, соответствующей данным НС. Полученное отклонение в изменении фазы характеризует несоответствие расчетной и истинной траекторий. Далее аппроксимируют эти отклонения задаваемой, например, линейной функцией с неизвестными параметрами, оценивают эти параметры, например с использованием метода максимального правдоподобия, и, исходя из этого, корректируют оценки положения ФЦА РСА, полученные по данным НС, и, соответственно, оценки координат обнаруженных по РЛИ объектов.
Другая возможность использования входной информации для корректировки данных НС также связана с самофокусировкой. Как уже отмечалось, при формировании РЛИ для достижения его высокого качества стремятся обеспечить когерентное сложение отраженных сигналов, получаемых за все N зондирований на интервале синтезирования для каждого элемента разрешения. На практике это достигается за счет использования алгоритмов самофокусировки. Существуют различные способы самофокусировки, в том числе способ, основанный на вводе в комплексную огибающую сигнала, принятого при i-м зондировании, корректирующей фазы ψiкop, получаемой, например, исходя из критерия достижения максимума одного из наиболее интенсивных отраженных сигналов. Однако при этом достигается синфазность суммируемых сигналов, отраженных от одного и того же объекта, но не происходит корректировка положения сигнала и, следовательно, не уменьшается ошибка в оценке положения объекта из-за неточного знания положения ФЦА.
Вместе с тем, знание корректирующей фазы ψiкор эквивалентно знанию корректирующей задержки, поскольку эта задержка является основной причиной появления этой фазы. При этом корректирующая задержка может быть вычислена как τiкор=ψiкор/2πf0, где f0=c/λ, а с - скорость света. Так как оценка корректирующей фазы осуществляется с точностью до целого числа 2π, то при такой самофокусировке ошибка в знании положения ФЦА однозначно оценивается в пределах длины волны λ. Соответственно, корректировка указанной ошибки может быть осуществлена на величину, не превышающую λ.
В многоканальном РСА величина ошибки в данных НС о положении ФЦА должна быть согласована с разрешающей способностью в канале с наилучшим разрешением, то есть в канале РСА с высокой несущей частотой. В каждом канале РСА величина его разрешающей способности, как правило, значительно превосходит длину волны этого канала. Поэтому не имеет смысла корректировать задержку, использую корректирующую фазу собственного канала. Зато можно использовать фазу, полученную в длинноволновом канале, то есть в канале с более низкой несущей частотой, для корректировки задержки в канале с высокой несущей частотой. Так, например, при длине волны в канале с низкой несущей частотой λдв=70 см его корректирующая поправка по дальности Riкор_дв может достигать 35 см, что соизмеримо с разрешающей способностью (порядка 1 м) в коротковолновом канале при λкв=3 см и полосе сигнала порядка 200 МГц. Полагая, что ошибка навигации по определению ФЦА двух частотных каналов одна и та же и учитывая, что Riкор_дв=τiкор дв с/2, можно по корректирующей фазе длинноволнового канала вычислить корректирующую задержку τiкор_дв=ψiкор_двλдв/2πс, а затем и корректирующую поправку по дальности Riкop=Riкор_дв.
Однако определение корректирующей фазы при использовании только входных сигналов осуществляется неоднозначно. Это можно показать, используя фиг.6, на которой показаны два варианта расположения сигналов i-го и (i+1)-го тактов зондирования при их суммировании. В варианте 1 (i+1)-й сигнал опережает сигнал i-го такта зондирования. В варианте 2 - сигнал (i+1)-го такта отстает от i-го сигнала. Но измеритель разности фаз, имеющий диапазон измерения фазы от -π до π, в обоих случаях покажет оценку ψi=2πcτi/λ. Поэтому для устранения неопределенности сначала проводят самофокусировку в длинноволновом канале, определяя его корректирующую фазу ψiкор_дв, а затем - в коротковолновом канале. При этом в коротковолновом канале сначала проводят оценку самофокусировки при двух предварительно вводимых в этом канале корректирующих смещениях сигнала на τ1корi и τ2корi, согласованных, например, с точностью до временной дискретизации сигнала в этом канале, с величинами соответственно ψiкор_дв/(2πf0) и [ψiкор_дв-2sign(ψiкop_дв)π]/(2πf0), где sign(x) означает операцию взятия знака х, a f0 - несущая частота зондирующего сигнала. Для самофокусировки выбирают то смещение, при котором интенсивность сигнала после самофокусировки больше, а соответствующее корректирующее смещение τ1корi или τ2кopi используют для коррекции оценки положения ФЦА РСА при (i+1)-м зондировании и, исходя из этого, осуществляют коррекцию геодезических координат обнаруженных по РЛИ объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗА ОБЪЕКТА НА РАДИОЛОКАЦИОННОМ ИЗОБРАЖЕНИИ | 2012 |
|
RU2516000C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 2006 |
|
RU2323450C1 |
| Способ оценки радиальной скорости объекта | 2018 |
|
RU2696084C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ОБЪЕКТА | 2015 |
|
RU2596610C1 |
| Способ распознавания космических аппаратов по редуцированным радиолокационным изображениям | 2015 |
|
RU2620727C2 |
| Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования Земли | 2016 |
|
RU2624460C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ НАВИГАЦИИ, ПОСАДКИ И ВЗЛЕТА ВЕРТОЛЕТА | 2014 |
|
RU2578202C1 |
| СПОСОБ ОБРАБОТКИ СВЕРХШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2016 |
|
RU2624005C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
Изобретение относится к способам радиолокационного обнаружения на местности малоразмерных объектов. Достигаемый технический результат - повышение оперативности и точности определения геодезических координат малоразмерных объектов. Сущность изобретения состоит в том, что в способе лоцирования, основанном на использовании радиолокатора бокового обзора с синтезированной апертурой (РСА), установленного на носителе в виде летательного аппарата (ЛА), включающем формирование предварительных данных об искомом объекте и его координатах, определение на основе этих данных траектории полета носителя и зон лоцирования для РСА, выход ЛА на заданную траекторию и лоцирование этих зон с помощью РСА с одновременным определением с помощью навигационной системы (НС) ЛА и запоминанием пространственного положения фазовых центров антенн (ФЦА) РСА при каждом зондировании, получение по выходу приемника РСА радиоголограмм (РГ) и их запоминание, формирование на основе РГ и пространственных положений ФЦА радиолокационного изображения (РЛИ) заданных зон лоцирования, обнаружение на этом РЛИ объекта, его распознавание и определение его геодезических координат, используют К≥2 каналов РСА, работающих в разных частотных диапазонах. Разрешение в канале с наибольшей несущей частотой и с наилучшим разрешением согласовывают с размерами обнаруживаемого объекта. При лоцировании сначала проводят первичное обнаружение объекта в зоне лоцирования, выбирая для этого канал РСА с наилучшей контрастностью сигнала искомого объекта на фоне местности, а результаты первичного обнаружения используют в канале с наибольшей несущей частотой, для чего формируют в этом канале фрагменты детальных РЛИ, число, положение и размеры которых соответствуют данным первичного обнаружения. На этих фрагментах обнаруживают, распознают и идентифицируют искомый объект и определяют его положение в экранной системе координат, положение которой в геодезической системе координат определяют по оценкам геодезических координат ФЦА РСА этого канала, и далее пересчитывают координаты объекта в геодезические координаты. Для увеличения эффективности способа по результатам первичного обнаружения объекта принимают решение о дополнительном лоцировании выбранных участков местности каналом с высоким разрешением. С этой же целью на РЛИ, формируемых в каналах первичного обнаружения, дополнительно формируют зону поиска и первичное обнаружение объекта осуществляют в этой зоне. При наличии на носителе пассивного локатора (ПЛ) при обнаружении и определении координат объекта, связанного по своему положению с источником радиоизлучений (ИРИ), формирование предварительных данных об искомом объекте и выбор параметров РСА осуществляют по данным этого ПЛ, причем, по возможности, используют траекторию носителя для формирования синтезированной пассивной антенной системы (СПАС), оптимизируя ее и время работы ПЛ и РСА. Для достижения требуемой точности определения координат объекта оговариваются требования к данным НС при оценке ФЦА при однократном зондировании лоцируемой зоны и при повторном зондировании при смене ракурса на угол, близкий к 90 градусам. Предлагаются также способы сглаживания данных НС, исходя из особенностей и требований РСА бокового обзора при решаемых задачах, а также использование самофокусировки в длинноволновом канале для коррекции ошибок НС. Предложенный способ обеспечивает увеличение эффективности оперативного обнаружения малоразмерного объекта и точности определения его геодезических координат. 10 з.п. ф-лы, 6 ил.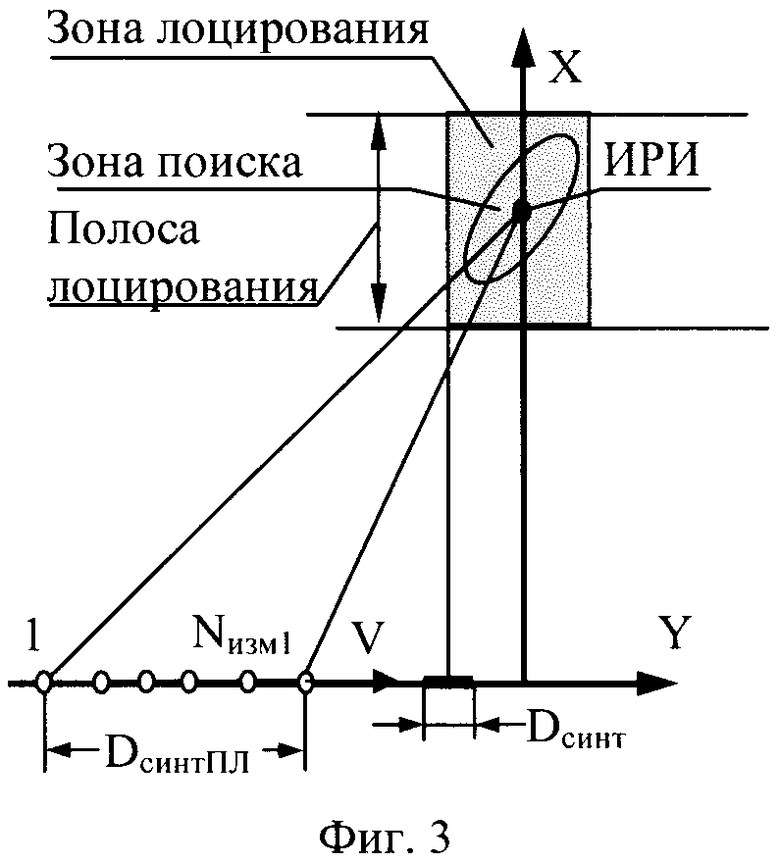
1. Способ обнаружения и определения координат искомого объекта, включающий использование радиолокатора бокового обзора с синтезированной апертурой (РСА), установленного на носителе в виде летательного аппарата (ЛА), формирование предварительных данных об искомом объекте и его координатах, определение на основе этих данных и характеристик выбранных ЛА и РСА траектории полета носителя и зон лоцирования для РСА, выход ЛА на заданную траекторию и лоцирование этих зон с помощью РСА с одновременным определением с помощью навигационной системы (НС) ЛА и запоминанием пространственного положения фазовых центров антенн (ФЦА) РСА при каждом зондировании, например, их геодезических координат, получение по выходу приемника РСА радиоголограмм (РГ) и их запоминание, формирование радиолокационного изображения (РЛИ) заданных зон лоцирования за счет обработки РГ за интервал синтезирования с учетом пространственных положений ФЦА и использования методов самофокусировки, обнаружение на этом РЛИ объекта, его распознавание и определение его положения в экранной системе координат с последующим определением геодезических координат объекта, отличающийся тем, что используют К≥2 каналов РСА, работающих в разных частотных диапазонах, причем разрешение в канале с наибольшей несущей частотой согласовывают с размерами обнаруживаемого объекта, НС выбирают из условия, что ошибки НС при определении положений ФЦА РСА не превосходят разрешения РСА, а при лоцировании сначала проводят первичное обнаружение объекта в зоне лоцирования, выбирая для этого каналы РСА с высокой контрастностью отраженного от искомого объекта сигнала на фоне местности, и результаты первичного обнаружения используют в канале РСА с более высоким разрешением, в котором формируют фрагменты детальных РЛИ, число, положение и размеры которых соответствуют данным первичного обнаружения, и на этих фрагментах обнаруживают, распознают и идентифицируют искомый объект, и определяют его местоположение в экранной системе координат, и далее пересчитывают координаты объекта в геодезические координаты, при этом привязку экранной системы координат к геодезической системе координат осуществляют, исходя из оценок геодезических координат ФЦА РСА этого канала.
2. Способ по п.1, отличающийся тем, что по результатам первичного обнаружения объекта принимают решение о дополнительном лоцировании участков местности, соответствующих данным первичного обнаружения, после чего совершают носителем маневр, в результате которого выводят носитель на траекторию, при которой обеспечивают лоцирование указанных участков местности в режиме бокового обзора, осуществляют зондирование этих участков каналом с высоким разрешением, получают РГ и оценивают пространственные положения ФЦА РСА при зондировании, на основании этих данных формируют требуемые фрагменты РЛИ и по ним проводят обнаружение, распознавание и идентификацию искомого объекта, и определяют его геодезические координаты, причем зоны лоцирования и параметры зондирования и формируемых РЛИ выбирают с учетом результатов первичного обнаружения и смены траектории носителя.
3. Способ по любому из пп.1 или 2, отличающийся тем, что на РЛИ, формируемых в каналах первичного обнаружения дополнительно формируют зону поиска, исходя из предварительных данных о координатах искомого объекта и выбранной зоны лоцирования, и первичное обнаружение объекта осуществляют в этой зоне.
4. Способ по любому из пп.1 или 3, отличающийся тем, что при обнаружении и определении координат объекта, связанного по своему местоположению с источником радиоизлучений (ИРИ) с известными характеристиками, формирование предварительных данных о координатах искомого объекта, а затем выбор траектории полета ЛА, зоны лоцирования и зон поиска для первичного обнаружения осуществляют путем обнаружения и определения координат ИРИ с помощью пассивного локатора, установленного на ЛА с использованием, например, синтезированной пассивной антенной системы (СПАС), причем траекторию ЛА и время синтезирования выбирают с учетом получения максимальной протяженности эффективной апертуры СПАС.
5. Способ по п.4, отличающийся тем, что оценку положения ИРИ и связанное с этой оценкой уточнение зоны поиска объекта в канале первичного обнаружения РСА осуществляют и после определения зоны лоцирования, выхода РСА в режим активного зондирования этой зоны и формирования ее РЛИ, а первичное обнаружение осуществляют после уточнения зоны поиска.
6. Способ по п.1, отличающийся тем, что за время синтезирования апертуры РСА с помощью НС ЛА многократно формируют взаимно независимые оценки положений ФЦА РСА, а их число N1 за интервал синтезирования выбирают из условия
 ,
,
где  - дисперсия ошибок в знании положения ФЦА РСА, оцениваемых по нормали к траектории движения носителя, Хоб - дальность до лоцируемого участка местности относительно траектории носителя, Dсинт - протяженность синтезируемой апертуры,
- дисперсия ошибок в знании положения ФЦА РСА, оцениваемых по нормали к траектории движения носителя, Хоб - дальность до лоцируемого участка местности относительно траектории носителя, Dсинт - протяженность синтезируемой апертуры,  - дисперсия допустимой ошибки в линейной привязке РЛИ к геодезическим координатам вдоль траектории ЛА.
- дисперсия допустимой ошибки в линейной привязке РЛИ к геодезическим координатам вдоль траектории ЛА.
7. Способ по п.1, отличающийся тем, что участок траектории движения ФЦА РСА, включающий интервал синтезирования, описывают некоторой функцией, параметры которой определяют на основе данных НС о положении ФЦА РСА на этом участке, например, с использованием метода максимального правдоподобия, и, исходя из этой функции и ее параметров, уточняют положение ФЦА РСА в каждый момент зондирования на интервале синтезирования и затем определяют геодезические координаты обнаруженных по РЛИ объектов.
8. Способ по п.1, отличающийся тем, что при проведении на интервале синтезирования Nсинт зондирований, необходимых для формирования одной строки РЛИ, выявляют один или несколько наиболее интенсивных сигналов, отраженных от объектов на лоцируемой местности и принятых РСА, оценивают изменения фаз этих сигналов за Nсинт зондирований и отклонения этого изменения от ожидаемого при траектории движения ФЦА РСА, соответствующей данным НС ЛА, аппроксимируют эти отклонения задаваемой, например, линейной функцией с неизвестными параметрами, оценивают эти параметры, например, с использованием метода максимального правдоподобия, и, исходя из этого, корректируют оценки положения ФЦА РСА, полученные по данным НС, и по этим оценкам определяют координаты обнаруженных по РЛИ объектов.
9. Способ по п.1, отличающийся тем, что используют любые два канала (К=2), а самофокусировку РСА осуществляют путем ввода корректирующей фазы в комплексные огибающие сигналов для каждого i-го зондирования, причем сначала самофокусировку проводят в канале, несущая частота которого ниже несущей частоты другого канала, определяют его корректирующую фазу ψiкор_дв, а затем в канале с более высокой несущей частотой, при этом в канале с более высокой несущей частотой сначала проводят оценку самофокусировки при двух предварительно вводимых в этом канале корректирующих смещениях сигнала на τiкор_дв и τ2корi, согласованных, например, с точностью до временной дискретизации сигнала в этом канале, с величинами соответственно ψiкор_дв/(2πf0) и [ψiкор_дв-2sign(ψiкop_дв)π]/(2πf0), где sign(x) означает операцию взятия знака х, a f0 - несущая частота зондирующего сигнала, и для самофокусировки выбирают то смещение, при котором интенсивность сигнала после самофокусировки больше, а соответствующее корректирующее смещение τiкор_дв или τ2корi используют для коррекции оценки положения ФЦА РСА при i-м зондировании и, исходя из этого, осуществляют расчет геодезических координат обнаруженных по РЛИ объектов.
10. Способ по п.1, отличающийся тем, что после зондирования полученной по предварительным данным зоны лоцирования, обнаружения в этой зоне искомого объекта, его идентификации и определения его координат проводят дополнительное зондирование этого объекта один и более раз при смене ракурса зондирования за счет изменения траектории носителя по азимуту, при этом при каждом новом лоцировании уточняют зоны лоцирования и поиска, исходя из результатов предыдущих зондирований и выбранной для этого зондирования траектории носителя, затем осуществляют обнаружение и идентификацию искомого объекта и оценку его координат, а результирующую оценку геодезических координат объекта определяют по результатам усреднения оценок координат объекта, полученных при разных ракурсах его лоцирования, с учетом ошибок этих оценок по разным координатам.
11. Способ по п.10, отличающийся тем, что смену ракурса выполняют относительно первого зондирования на угол 65°<α<115°, а число N2 независимых оценок положений ФЦА РСА за интервал синтезирования в этом случае выбирают из условия
 ,
,
где  - дисперсия допустимой ошибки в линейной привязке РЛИ к геодезическим координатам.
- дисперсия допустимой ошибки в линейной привязке РЛИ к геодезическим координатам.
| КОНДРАТЕНКОВ Г.С., ФРОЛОВ А.Ю | |||
| Радиовидение | |||
| - М.: Радиотехника, 2005, с.9, 13, 15, 16, 19-25, 175, 176, 195, 247-250, 276 | |||
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| АВИАЦИОННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА БОКОВОГО ОБЗОРА ЗЕМЛИ | 2000 |
|
RU2168186C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ НАЗЕМНЫХ ОБЪЕКТОВ РАДИОЛОКАТОРОМ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2006 |
|
RU2308050C1 |
| US 5552787 A, 03.09.1996 | |||
| US 5608404 A, 04.03.1997 | |||
| KR 20080030090 A, 03.04.2008 | |||
| US 2006109163 A1, 25.05.2006 | |||
| СПОСОБ ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2628160C1 |
| СМЕСИ О-АЦИЛ-ИЗЕТИОНАТОВ И ПАВ НА ОСНОВЕ N-АЦИЛ-АМИНОКИСЛОТ | 2013 |
|
RU2606113C2 |

