чик импульсов 8, одновибратор 9, цифровое устройство выборки - хранения (ЦУВХ) 10, цифроанзлоговый преобразователь 11, регулятор положения 12, устройство сравнения 13, выпрямитель 14, компаратор 15,
амплитудный регулятор 16, задающий генератор 17, коммутатор 18, исполнительный механизм для сматываниями наматывания кабельного изделия 19. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электрогидравлической системой и устройство для его осуществления | 1989 |
|
SU1779806A1 |
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1982 |
|
RU1074361C |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2050673C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
| Многодвигательный электропривод | 1988 |
|
SU1575287A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ КОЛЕБАНИЙ | 1991 |
|
RU2024912C1 |
| Устройство для снижения остаточных сварочных напряжений | 1977 |
|
SU673997A1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
Изобретение относится к испытательной технике, а именно к устройствам для испытания изделий (кабели, провода, шнуры, канаты, жгуты и т. д.) на многократные перемотки, и может найти применение в электротехнической промышленности. Цель изобретения состоит в повышении достоверности испытаний путем расширения диапазона углов закручивания за счет регулирования нейтрали колебаний с возможностью стабилизации нейтрали в любом из заданных положений. Устройство содержит блок управления, состоящий из асинхронного двигатепч 1 с обмотками возЬ денил 2 и управления 3, подключенными к i сточ- ником переменного тока 4 и 5 члс.о f; f; соответственно, датчик полохениг 5, Формирователь сигналов 7, ревезсивну U N, IV, л д 14} -
Изобретение относится к испытательной технике, а именно к устройствам для испытания кабельных изделий (кабели, провода, шнуры, канаты, жгуты и т. д.) на многократные перемотки, и может найти применение в электротехнической промышленности.
Изобретение решает задачу улучшения качества испытаний кабельных изделий.
Известны устройства 1, 2 и 3 для испытания кабельных изделий на многократные перегибы, состоящие из дух шкивов для перегиба изделия, натяжного механизма. Циклическое вращение шкивов осуществляется от двигателя посредством кинематической схемы перемещения.
Устройство 1 и 2 не позволяет осуществлять двухстороннюю деформацию при перегибе изделия, где участки кабельного изделия за один цикл перемотки претерпевают деформацию как сжатия, так и растяжения. Кроме тбго, при такой системе перемещения ограничивается диапазон угла вращения. Все эти недостатки не дают возможности испытать изделия в условиях, имитирующих условия эксплуатации.
Известен вибрационный электропривод со стабилизацией амплитуды колебаний вала двигателя 4. Однако такое устройство является разомкнутой системой регулировки, не имеет датчика положения и, следовательно, не может осуществлять стабилизацию нейтрального положения вала (нейтрали колебаний). Кроме того, устройство не предназначено для работы в диапазоне частот колебаний, характерных для процесса испытания гибких изделий, т. е. в области инфранизких частот.
Известно также устройство для управления двухфазным асинхронным двигателем в режиме колебательного движения преимущественно инфранизких частот 5. Однако подобное устройство является также розомкнутым по положению и не позволяет регулировать и стабилизировать нейтраль колебаний.
Известно устройство с электроприводом колебательного движения, содержащее двухобмоточный асинхронный двигатель, фазовращатель, источник переменного тока, регулятор амплитуды тока, блок смещения нейтрали и датчик направления вращения, соединенный через блок смещения нейтрали с управляющим входом регулятора амплитуды тока, вход которого подключен к выходу фазовращателя, выход - к обмотке управления двигателя 6.
Недостатками такого устройства являются, во-первых, невысокая точность регулирования скорости,смещения нейтрали
колебаний из-за отсутствия информации о положении ротора в любой момент времени, поскольку имеющийся в устройстве датчик обратной связи формирует лишь сигнал направления вращения вала электродвигателя; во-вторых: невысокая точность стабилизации нейтрали колебаний по тем же причинам. В результате подобное устройство не позволяет в широком диапазоне регу- лировать нейтраль колебаний с
возможностью стабилизации нейтрали в любом из заданных положений. Это существенно ухудшает эксплуатационные характе- ристики привода, вызывающего разностороннее движение барабанов,
предназначенных для сматывания и наматывания гибкого кабеля и не позволяет осуществлять вращения барабанов с большой точностью в широком диапазоне углов закручивания.
Наиболее близким по технической сущности является прибор для испытания гибких малогабаритных кабелей на устойчивость к многократным перемоткам 7, состоящий из блока управления, кинематически связанного с приводом главного движения через шестерни, где от электродвигателя вращения передается на две чер- вячные передачи правого и левого исполнения, чем обеспечивается разностороннее вращение двух осей, на которые надеваются съемные барабаны для сматывания кабеля с одного из них на другой под действием растягивающей нагрузки.
Недостатком такого прибора заключается в том, что наличие в электрической схеме блока управления электромагнитных реле и пускателей снижает надежность работы установки из-за малого ресурса этих элементов. Кроме того, реверсирование
двигателя с помощью магнитных пускателей приводит к большим динамическим нагрузкам в момент его пуска, что сказывается на качестве испытаний и приводит к быстрому износу деталей. Отсутствие возможности стабилизации вращения барабанов в процессе реверсирования двигателя не позволяет проводить многократную перемотку кабельных изделий в широком диапазоне углов закручивания барабанов.
Целью изобретения является повышение достоверности испытаний путем расширения диапазона углов закручивания.
Поставленная цель достигается тем, что блок управления выполнен в виде последовательно соединенных формирователя сигналов, реверсивного счетчика импульсов, цифрового блока выборки хранения, цифро- аналогового преобразователя, блока сравнения компаратора, амплитудного регулятора и задающего генератора, регулятора положения, выход которого соединен со вторым входом блока сравнения, одновибратора, вход которого подключен к управляющему выходу формирователя сигналов и к управляющему входу реверсивного счетчика импульсов, а выход - к стробирующему входу цифрового блока выборки-хранения коммутатора, выход которого соединен с,входом предварительной установки реверсивного счетчика импульсов, а вход - с шиной нулевого потенциала, выпрямителя, вход которого соединен с выходом блока сравнения и со входом компаратора, а выход - с управляющим входом амплитудного регулятора, информационный вход которого соединен с выходом задающего генератора, а выход с управляющим входом амплитудного регулятора, информационный вход которого соединен с выходом задающего генератора, а выход-с управляющим входом электродвигателя, разрешающий вход амплитудного регулятора соединен с входом одновибратора и с управляющим выходом формирователя сигналов.
По сравнению с наиболее близким аналогичным техническим решением, заявляемое техническое решение имеет следующие отличительные признаки:
блок управления выполнен в виде последовательно соединенных формирователя сигналов, реверсивного счетчика импульсов, цифрового блока преобразователя, блока сравнения компаратора, амплитудного регулятора и задающего генератора, регулятора положения, выход которого соединен со вторым входом блока сравнения, одновибратора, вход которого подключен к управляющему выходу формирователя сигналов и к управляющему входу реверсивного счетчика импульсов, а выход
- стробирующему входу цифрового блока выборки-хранения коммутатора, выход которого соединен со входом предваритель- 5 ной установки реверсивного счетчика импульсов, а вход-с шиной нулевого потенциала, выпрямителя, вход которого соединен с выходом блока сравнения и со входом компаратора, а выход-с управляющим вхо0 дом амплитудного регулятора, информационный вход которого соединен с выходом задающего генератора, а выход с управляющим входом электродвигателя, разрешающий вход амплитудного регулятора
5 соединен с входом одновибратора и с управляющим выходом формирователя сигналов.
Следовательно,заявляемое техническое решение соответствует критерию новиз0 на.
При реализации изобретения достигается расширение диапазона угла закручивания за счет регулирования нейтрали колебаний с возможностью стабилизации
5 нейтрали в любом из заданных положений, При реализации изобретения расширяются функциональные возможности устройства за счет возможности устройства обеспечить образцу кабельного изделия
0 при испытании на перемотки на вращающихся барабанах различные углы его закручивания, точную и удобную их регулировку путем стабилизации и регулирования нейтрали колебаний исполнительного двигателя
5 в любом из заданных положений.
По сравнению с эффектом прототипа, получен новый эффект, благодаря тому, что блок управления устройства выполнен в виде формирователя сигналов, обрабатываю0 щий сигналы датчика положения, расположенного на валу электродвигателя и вырабатывающий импульсы заданной длительности для реверсивного счетчика импульсов прямого и обратного хода рабочего
5 органа, а также сигнал направления вращения вала двигателя sing Ј; однивибратора, срабатывающего по фронту сигнала sign | и управляющий работой цифрового блока выборки-хранения, передающий информа0 Цию на вход цифроаналогового преобразователя (ЦАП); блока сравнения компаратора, на один вход которого подается с ЦАП информация о положении рабочего органа, а на другой вход поступает сигнал с
5 регулятора положения и формирующее сигнал рассогласования; компаратора и выпря: мителя, управляющие работой амплитудного регулятора; задающего генератора, коэффициент передачи синусоидального напряжения которого изменяется посредством регулятора в сторону уменьшения от номинального значения в зависимости от величины и знака рассогласования, а также от направления вращения исполнительного двигателя; источника пер. тока, на который поступает регулируемое по амплитуде синусоидальное напряжение частоты ft. Затем этот сигнал поступает на обмотку управления двигателя; коммутатора, с по-- мощью которого осуществляется обнуление входов счетчика, что соответствует заданию нового положения нейтрали колебаний, регулирование которой осуществляется регулятором. Таким образом,за счет введения обратной связи по положению и за счет регулирования амплитуды напряжения обмотки управления асинхронного двигателя осуществляется стабилизация и регулировка в широких пределах положения нейтрали колебаний, позволяющая регулировать в широких пределах угол закручивания кабельного изделил при сматывании и наматывании его на вращающиеся барабаны.
Следовательно, заявляемое техническое решение соответствует критерию положительный эффект. Авторами не обнаружены устройства с заявляемыми существенными признаками, следовательно, решение обладает критерием существенные отличия.
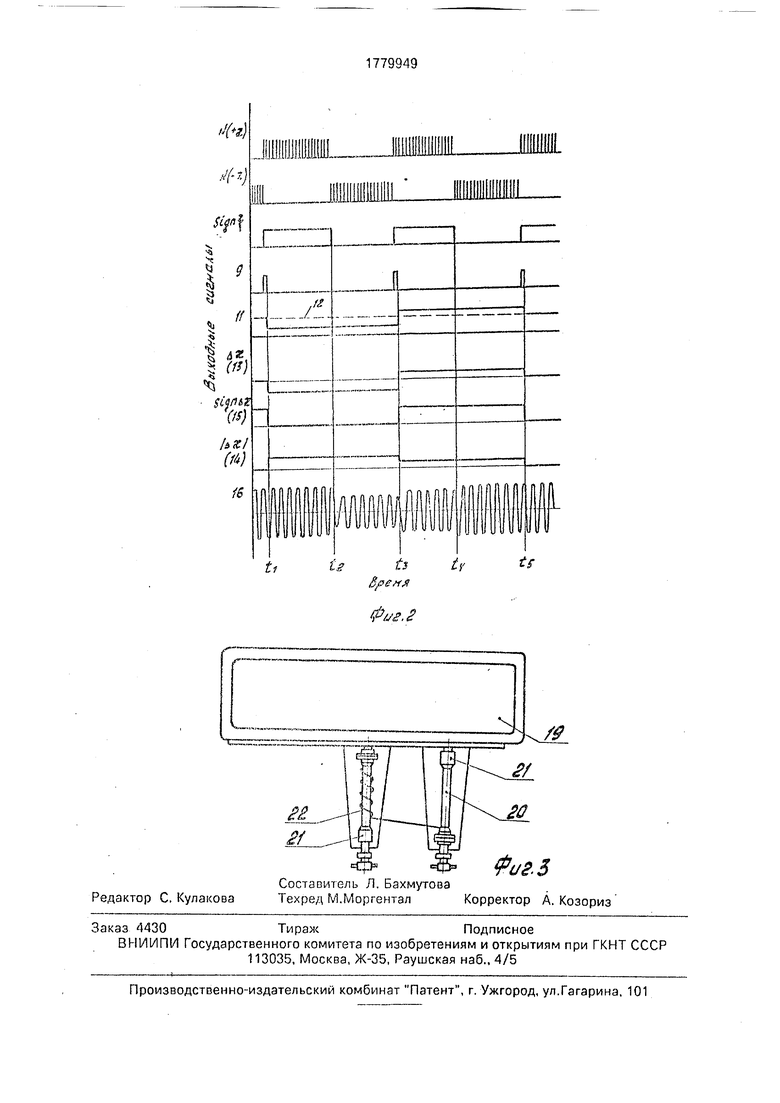
На фиг. 1 показана блок-схема устройства; на фиг. 2 - график процесса регулирования амплитуды управляющего напряжения; на фиг. 3 - общий вид исполнительного механизма.
Устройство содержит блок управления: из асинхронного двигателя 1 с обмотками возбуждения (0В) 2 и управления (ОУ) 3, подключенными к источникам переменного тока(ИПТ)4 и5частот 1 и fa соответственно, датчик положения 6, формирователь сигналов 7, реверсивный счетчика импульсов 8, одновибратор 9, цифровой блок выборки - хранения (ЦБВХ) 10, цифроаналоговый преобразователь (ЦАП) 11, регулятор положения (РП) 12,блок сравнения компаратора 13, выпрямитель 14, компаратор 15, амплитудный регулятор 16, задающий генератор 17, коммутатор 18, оси 20, на которые надеваются съемные барабаны 21 исполнительного механизма 19 для сматывания и наматывания по ним с растяжением испытуемого кабельного изделия 22.
Устройство работает следующим образом.
Разночастотное запитывание обмоток 2 и 3 электродвигателя 1 от источников питания 4 и 5 вызывает колебательный режим работы электродвигателя 1. В процессе колебаний с датчика положения 6, расположенного на валу исполнительного двигателя, импульсные сигналы поступают на формирователь 7, вырабатывающий импульсы прямого N (+ /с) и обратного счета N (- к )
для счетчика 8, а также сигнал сигнатуры .колебательной скорости sign Ј . Счетчик импульсов 8 ведет непрерывный счет импульсов прямого и обратного хода рабочего органа и формирует на своих выходах параллельный двоичный код. Цифровой блок выборки - хранения 10 осуществляет передачу текущего значения двоичного кода на вход цифроаналогового преобразователя 11. Выборка производится один раз цикл
колебания в моменты поступления в строби- рующий вход ЦБВХ импульсов с одновибра- тора 9, срабатывающих по фронту сигнала в моменты времени (ti, тз. ts). Информация о положении рабочего органа устройства с выхода ЦАП в аналоговом виде передается в блок сравнения компаратора 13, на второй вход которого поступает сигнал с регулятора положения 12, которым может являться, например, потенциометр,
подключенный к источнику постоянного напряжения. Блок сравнения формирует сигнал рассогласования Д/с как разность напряжения ЦАП и опорного напряжения регулятора 12. Далее компаратор 15 и выпрямитель 14 по сигналу Д/с вырабатывают напряжения sign Д/с и /Д/с /, управляющие работой амплитудного регулятора 16. В результате коэффициент передачи синусоидального напряжения
задающего генератора 17 изменяется посредством регулятора 16 в сторону уменьшения от номинального значения в зависимости,от величины и знака рассогласования , а также от направления вращения
исполнительного двигателя электропривода. Регулирование происходит во время совпадения уровней логических сигналов slgnЈ и sign Д/с . Глубина регулирования определяется величиной / Д/с /. Моменты
времени тл, тз. t4 (фиг. 2) иллюстрируют процесс регулирования амплитуды управляющего напряжения (график 16). Регулируемое по амплитуде синусоидальное напряжение частоты fa поступает далее на ИПТ 5 и затем
0 на обмотку управления 3 электродвигателя 1. С помощью коммутатора 18 осуществляется обнуление входов счетчика 8, что соответствует заданию нового положения нейтрали колебаний.
5 Дальнейшая стабилизация и регулирование нейтрали колебаний будут производиться относительно того положения рабочего органа установки, в котором он находился в момент срабатывания коммутатора 18. Плавное регулирование нейтрали осуществляется регулятором 12. В результате этого асинхронный электродвигатель 1, работая в режиме вращательно-колеба- тельного движения, создает вращательно- колебательное движение осям 20 с закрепленными на них съемными барабанами 21 для сматывания и наматывания на них испытуемого образца 22 в широких пределах углов закручивания, что приближает ус- ловия испытания к условиям работы этого изделия в условиях эксплуатации.
Таким образом, предлагаемое устройство позволяет осуществить стабилизацию и регулирование в широких пределах положе- ния нейтрали колебаний за счет введения обратной связи по положению и за счет регулирования амплитуды напряжения обмоткиуправленияасинхронногоэлектродвигателя. Отрицательный характер обратной связи по положению определяет стремление системы уменьшить рассогласование А/с , и, тем самым, компенсировать возможный уход геометрической нейтрали колебаний, вызываемый, напри- мер, несимметрией нагрузки, ее непостоянством во времени или иными возмущениями.
Это позволяет с большей точностью регулировать и обеспечивать заданный угол вращения асинхронного электродвигателя, а значили угол закручивания барабанов для сматывания и наматывания кабельного изделия, в результате чего кабельное изделие при сматывании на барабан реверсивно за- кручивается в широком диапазоне с большой точностью как в ту так и в другую сторону.
Таким образом, заявляемое устройство позволяет расширить эксплуатационные возможности устройства с большой точностью и в широком диапазоне регулировать угол закручивания кабельного изделия, что позволит приблизить условие испытаний и
к эксплуатационным условиям, тем самым повысить достоверность испытаний. Формула изобретения Устройство для испытания гибких кабельных изделий на многократные перемотки, содержащее электродвигатель с приводом, кинематически связанные с ним два съемных барабана, предназначенные для сматывания и наматывания кабельного изделия, датчик положения, расположенный на валу электродвигателя, блок управления, связанный с приводом электродвигателя, отличающееся тем, что, с целью повышения достоверности испытаний путем расширения диапазона углов закручивания, блок управления выполнен в виде последовательно соединенных формирователя сигналов реверсивного счетчика импульсов, цифрового блока выборки - хранения, цифроаналогового преобразователя, блока сравнения, компаратора, амплитудного регулятора и задающего генератора, регулятора положения, выход которого соединен с вторым входом блока сравнения, одновибратора, выход которого подключен к управляющему выходу формирователя сигналов и к управляющему входу реверсивного счетчика импульсов, а выход - к стробирующему входу цифрового блока выборки - хранения, коммутатора, выход которого соединен с входом предварительной установки реверсивного счетчика импульсов, а вход - с шиной нулевого потенциала, выпрямителя, вход которого соединен с выходом блока сравнения и с входом компаратора,,а выход - с управляющим входом амплитудного регулятора, информационный вход которого соединен с выходом задающего генератора, а выход - с управляющим входом электродвигателя, разрешающий вход амплитудного регулятора соединен с входом одновибраторз и управляющим выходом формирователя сигналов.
Ј U
1И
.Л
лэ
|Й
45
Sigmti
W
/АХ/
W
15
tt
ists
fyeXJt
Фиг. 2
Редактор С. Кулакова
Фиг 5
Составитель Л. Бахмутова
Техред М.МоргенталКорректор А. Козориз
л
L
tr
tf
