Изобретение относится к железнодорожному транспорту и может быть использовано в системах автоматического регулирования скорости отцепов на сортировочных горках при реализации прицельного торможения.
Известен способ определения сопротивления движению отцепов на сортировочной горке, заключающийся в том, что определяют скорость выхода отцепа из интервальной позиции и скорость движения отцепа на входе в прицельную тормозную позицию, определяют разность между ними и по указанной разности определяют сопротивление движению отцепа на спускной части горки.
Задача, на решение которой направлено данное изобретение - повышение точности.
Решение задачи достигается тем, что в способе определения сопротивления движению отцепов на сортировочной горке, заключающемся в том, что определяют скорость выхода отцепа из интервальной тормозной позиции и скорость движения отцепа на входе в прицельную тормозную позицию, определяют разность между ними и по разности определяют сопротивление движения отцепа по спускной части горки, с целью повышения точности, определяют ускорение движения отцепа на пути подгорочного парка и по нему определяют сопротивление движению отцепа по пути подгорочного парка, определяют разность между ним и сопротивлением движению отцепа, определенным при движении отцепа по спускной части горки, и определяют сопротивление движению последующего отцепа, суммируя эту разность с сопротивлением движению данного отцепа, определенного на спускной части горки.
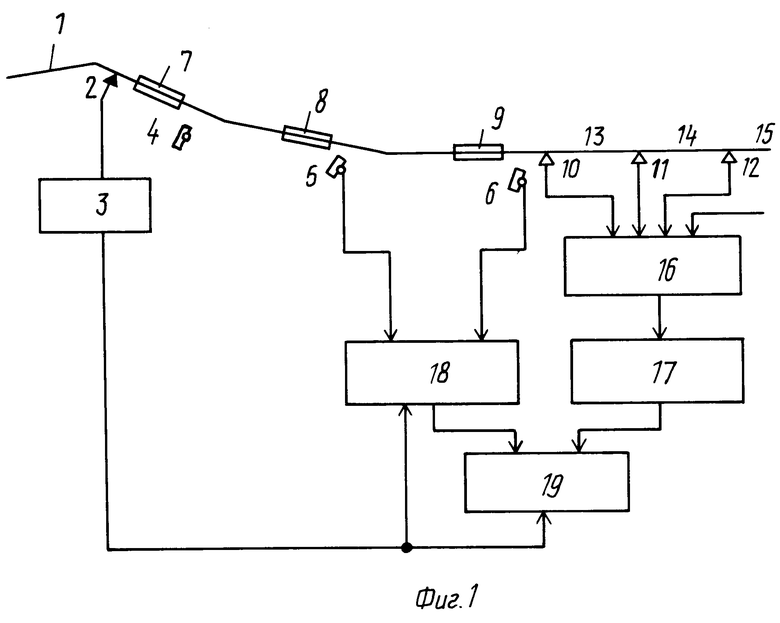
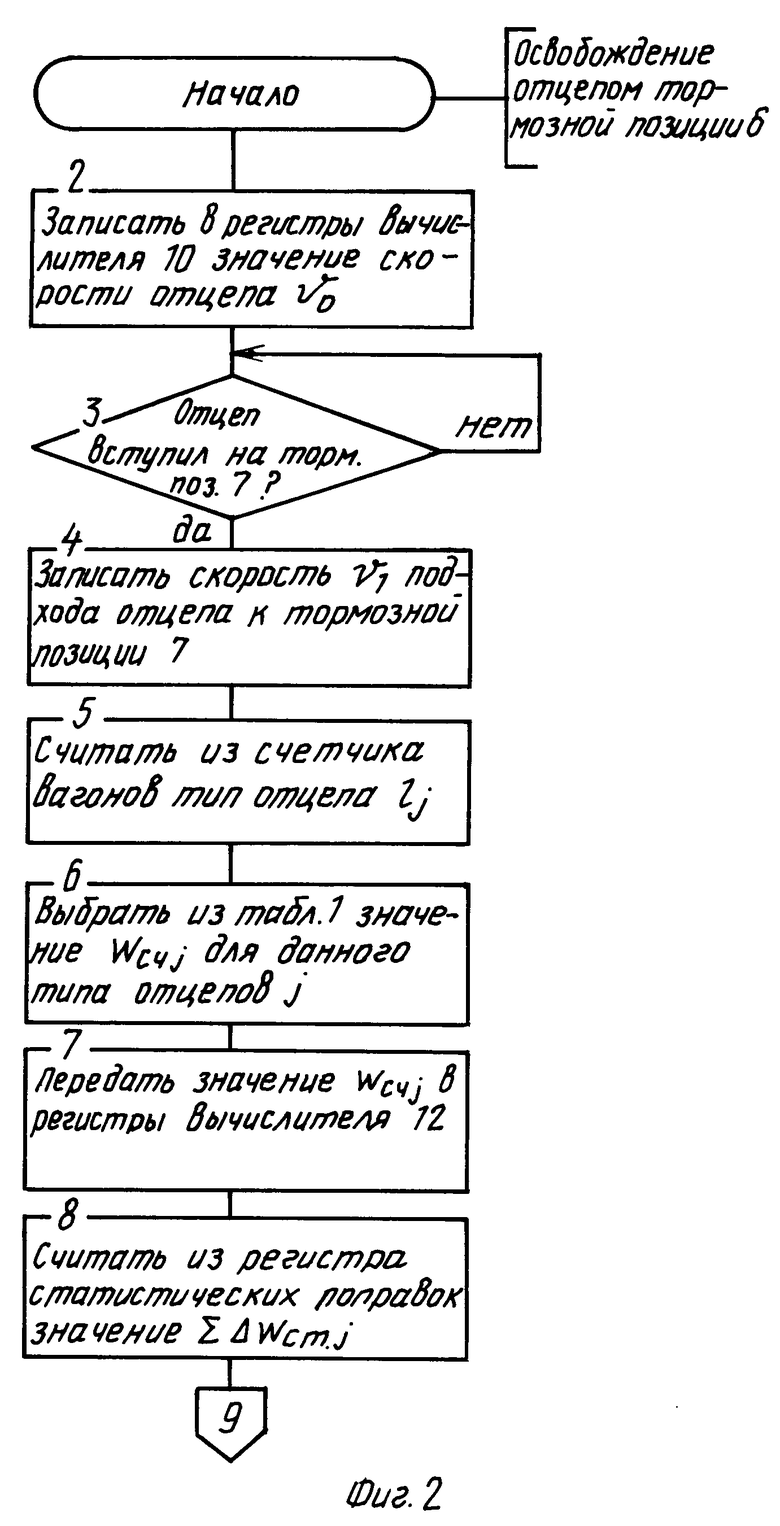
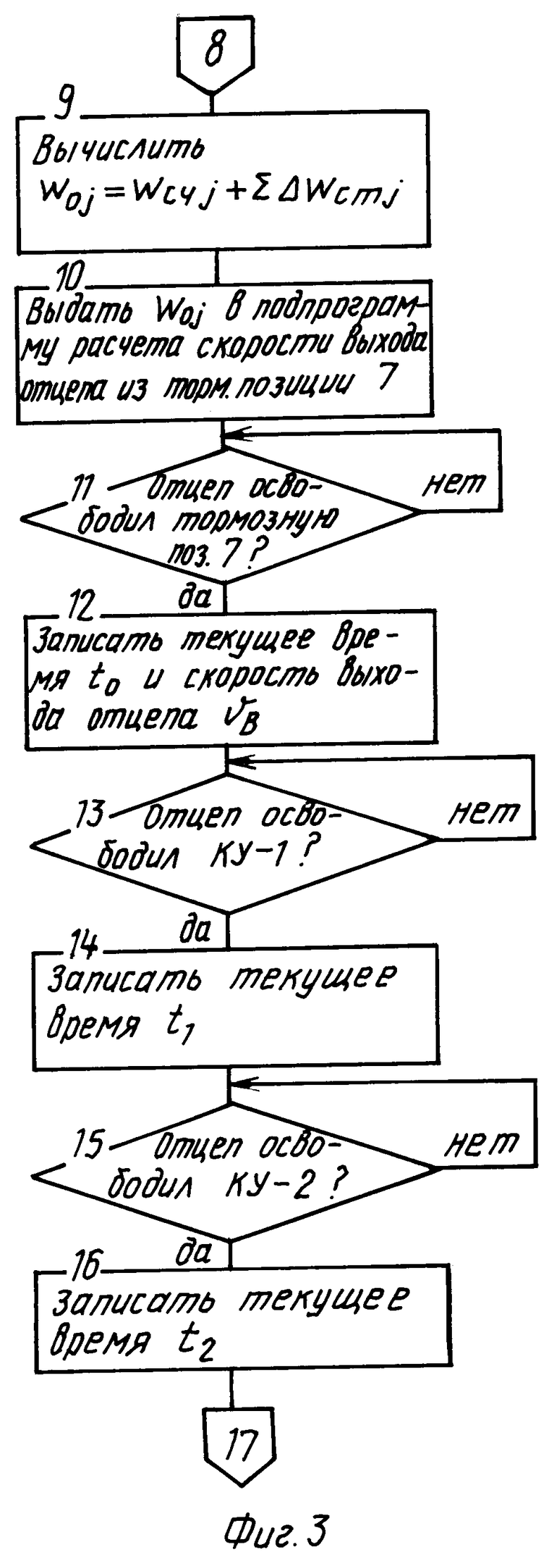
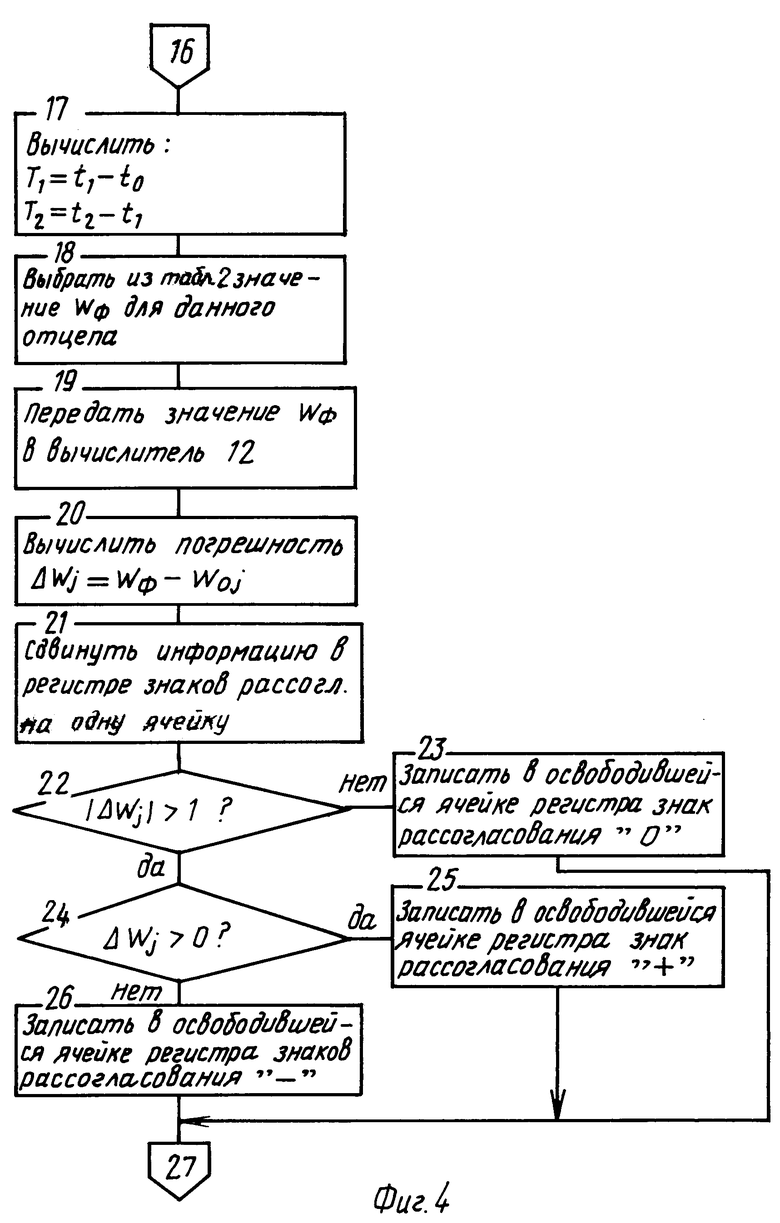
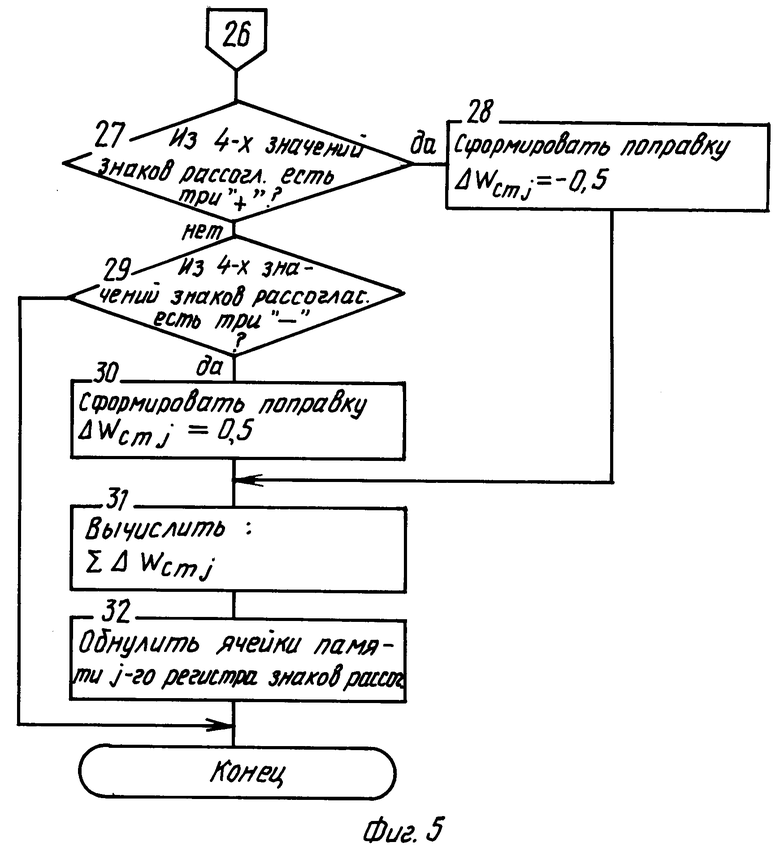
На фиг. 1 представлена структурная схема устройства, реализующего способ определения ходового сопротивления движению отцепов на сортированной горке; на фиг. 2-5 - алгоритм работы устройства.
Устройство содержит установленный в начале спускной части сортировочной горки 1 путевой датчик 2, выход которого подключен к входу счетчика 3 вагонов, радиолокационные измерители скорости 4-6, установленные соответственно на выходе первой тормозной позиции 7, второй тормозной позиции 8 и прицельной тормозной позиции 9, путевые датчики 10-12, расположенные соответственно на контрольных участках 13-15, блок 16 согласования, входы которого подключены к выходам путевых датчиков 10-12, а выход - к входу вычислителя 17 величины удельного сопротивления движению отцепа на сортировочном пути, вычислитель 18 величины удельного сопротивления движению отцепа на спускной части горки, вычислитель 19 величины удельного сопротивления движению отцепа с учетом изменения условий скатывания, входы которого подключены к выходам вычислителей 17 и 18 и счетчика 3 вагонов.
Предлагаемый способ определения ходовых свойств отцепов на сортировочной горке реализован следующим образом.
Все скатывающиеся отцепы условно подразделяют, например, на четыре типа. Принадлежность отцепа к конкретному типу j определяют его длиной l. Так, одновагонные отцепы относят к первому типу j = 1, двухвагонные - ко второму j = 2, трехвагонные - к третьему j = 3. Отцепы состоящие из четырех и более вагонов относят к четвертому типу j = 4 (отцепам четвертого типа значение присваивается по весовой категории).
В момент выхода отцепа из второй тормозной позиции 8 регистры вычислителя 18 фиксируют фактическую скорость отцепа vo, поступающую от радиолокационного измерителя скорости 5 данной тормозной позиции. При вступлении отцепа на прицельную тормозную позицию 9 от соответствующего измерителя скорости 6 в вычислитель 18 поступает значение фактической скорости v1 подхода отцепа к тормозной позиции 9, а из счетчика 3 вагонов - тип отцепа j. Так как заранее известны параметры спускной части горки между тормозными позициями 8-9, то вычислитель 18 определяет значение удельного ходового сопротивления Wcrj по формуле
Wcrj=  + iпр , Н/кН (1) где g' - приведенное ускорение, м/с2;
+ iпр , Н/кН (1) где g' - приведенное ускорение, м/с2;
s - расстояние между второй и прицельной тормозными позициями, м;
iпр - приведенный уклон зоны между второй и прицельной тормозными позициями, %.
Значение iпр вычисляют по известной формуле
iпр= i -  (2) где i - проектный уклон, %;
(2) где i - проектный уклон, %;
N - количество стрелок;
α - угол кривизны стрелки, град;
β - сумма модулей углов поворота пути, град.
Полученное в вычислителе 10 значение Wcrj поступает в вычислитель 12, где используется для определения ходового сопротивления отцепа Woj по формуле
Woj= Wcrj+ Σ ΔWcmj (3) где ΣΔWcmj - алгебраическая сумма статистических поправок для j-го типа отцепов.
Вычислительное значение используется в системе автоматического регулирования скорости для реализации прицельного торможения отцепа.
Регистры вычислителя 17 фиксируют время to - освобождения отцепом тормозной позиции 9, t1 - освобождения отцепом участка 13, t2 - освобождения отцепом участка 14. По значениям вычислитель 17 определяет ускорение отцепа "а" при его движении по контрольным участкам 13, 14 по формуле
a =  , м/с2 (4) где L - длина контрольного участка (КУ), м;
, м/с2 (4) где L - длина контрольного участка (КУ), м;
Т1, Т2 - промежутки времени хода последней оси отцепа по контрольным участкам 13 и 14 с. Значения Т1, Т2 определяются следующим образом:
Т1 = t1 - to, c (5)
Т2 = t2 - t1, с (6)
Так как заранее известны параметры сортировочного пути в зоне контрольных участков 14, то вычислитель 11 определяет фактическое значение удельного сопротивления Wоp по формуле
Wф= i -
-  ·103 , Н/кН, где iпр1 - приведенный уклон контрольных участков, %.
·103 , Н/кН, где iпр1 - приведенный уклон контрольных участков, %.
Значение Wф поступает в вычислитель 12 для определения погрешности задания удельного сопротивления ΔWj по формуле
ΔWj = Wф - Woj, Н/кН.
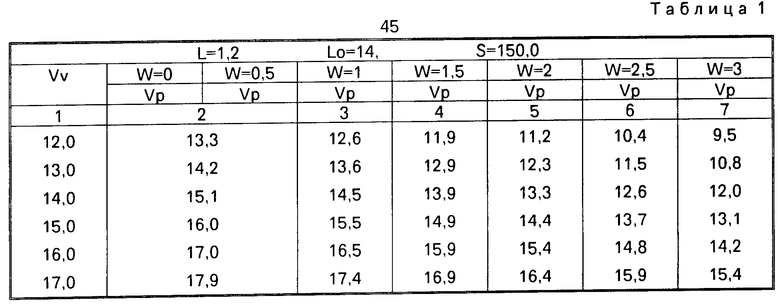
С целью сокращения затрат времени на выполнение вычислительных операций, ряд формул в алгоритме представлен в виде таблиц. Так, табл. 1 составляется по формуле 1 для отцепов трех типов. Тип отцепа указан над таблицей символом Lo. Первый тип Lo = 14, второй Lo = 28, третий FLo = 42. Символ L соответствует значению приведенного уклона, равного 1,2, символ S - расстояние между тормозными позициями 6 и 7 в метрах. Для определения Wcrj достаточно задаться значением скорости Vv выхода отцепа из тормозной позиции 6 (км/ч) и скорости Vp подхода к тормозной позиции 7 (км/ч). В строке W значениям скоростей соответствует искомое значение Vv. Необходимо отметить, что столбцы Vp соответствуют границам диапазона скоростей, определяющих W. Так, например, при скорости Vv = 12 и скорости Vp ˙ W = 11, значение равно 2, так как Vp = 11 находится в диапазоне 11,2-10,4 соответствующем W = 2.
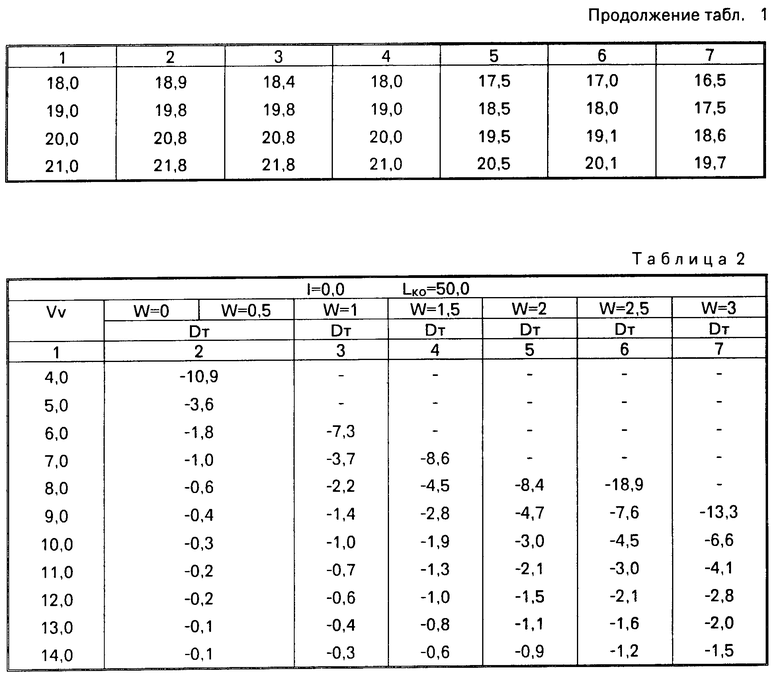
Табл. 2 содержит результаты расчетов выполненных по формулам 4-7 и определяет значение Wф. В таблице приняты следующие обозначения:
Vv - скорость (км/ч) выхода отцепа из тормозной позиции 7;
I - приведенный уклон КУ-1, КУ-2;
Lко - длина каждого контрольного участка, м;
DI - разность времени хода отцепа по первому и второму КУ, с.
Определение Wф осуществляется аналогично описанному выше для табл. 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ПОВРЕЖДЕНИЯ ВАГОНОВ ПРИ ЗАГРЯЗНЕНИИ БАНДАЖЕЙ КОЛЕСНЫХ ПАР ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2016 |
|
RU2634054C1 |
| Устройство для управления регулированием скорости отцепов на сортировочной горке | 1976 |
|
SU564201A1 |
| Способ содержания путей железнодорожного сортировочного парка на основе данных видеоаналитики | 2024 |
|
RU2836946C1 |
| Способ определения ходовых свойств вагонов для корректировки работы подсистемы автоматического роспуска составов горочного комплекса | 2018 |
|
RU2689668C1 |
| Устройство для управления регулированием скорости скатывания отцепов на сортировочных горках | 1975 |
|
SU545501A1 |
| Способ диагностики продольного профиля железнодорожных путей сортировочного парка | 2022 |
|
RU2779427C1 |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПОДГОРОЧНЫХ ПУТЕЙ СОРТИРОВОЧНОЙ СТАНЦИИ | 2008 |
|
RU2392151C2 |
| Способ и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки | 2019 |
|
RU2705035C1 |
| Тренажерный комплекс оперативного персонала сортировочной горки | 2023 |
|
RU2810931C1 |
Использование: на железнодорожном транспорте и при реализации прицельного торможения. Сущность изобретения: способ заключается в том, что определяют ускорение движения отцепа после выхода отцепа с прицельной тормозной позиции, по нему определяют величину фактического ходового сопротивления движению отцепа, сравнивают его с вычисленным на спускной части горки и, в случае рассогласования, формируют поправки к вычисленному значению сопротивления движению отцепа. В результате уменьшается погрешность определения сопротивления движению отцепа для последующих отцепов, т.е. повышается точность определения. 5 ил., 2 табл.
СПОСОБ ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ, заключающийся в том, что определяют скорость выхода отцепа из интервальной тормозной позиции и скорость движения отцепа на входе в прицельную тормозную позицию, определяют разность между ними и по указанной разности определяют сопротивление движению отцепа по спускной части горки, отличающийся тем, что, с целью повышения точности, определяют ускорение движения отцепа по пути подгорочного парка и по нему определяют сопротивление движению отцепа по пути подгорочного парка, определяют разность между ним и сопротивлением движению отцепа, определенным при движении отцепа на спускной части горки и, суммируя указанную разность со значением сопротивления движения данного отцепа на спускной части горки, определяют сопротивление движению последующего отцепа.
| Патент США N 3698788, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
