Изобретение относится к диагностике верхнего строения рельсового пути, в частности к способам содержания продольного профиля железнодорожных путей сортировочного парка на основе данных видеоаналитики, в частности систем технического зрения.
Известные способы содержания путей сортировочного парка в условиях постоянного повышения уровня автоматизации процесса расформирования составов не позволяют вовремя провести текущий ремонт сортировочных путей в связи с трудоемкостью и плановым характером ремонта.
Известен способ выправки и контроля железнодорожного пути, включающий определение геометрии пути с помощью выправочно-подбивочно-рихтовочной машины и выправку пути. Геометрию пути определяют посредством измерения и расчета пространственного положения пути в продольном профиле и в плане, а также расчета относительных осадок пути, на основании которых судят о степени уплотнения балласта, после этого производят сравнение полученных результатов с проектным положением пути, по результатам которого составляют программные задания, выполненные с возможностью их использования на упомянутой машине или передачи на другую путевую машину и содержащие расчетные параметры для установки пути в проектное положение, а выправку и контроль пути осуществляют при следующем рабочем проходе выправочно-подбивочно-рихтовочной машины или с помощью путевой машины, которой были переданы программные задания (RU 2443826 С2, E01B 35/00, B61K 9/08, 27.02.2012).
Недостатком известного способа является необходимость закрытия и освобождения путей от подвижных единиц, отсутствие привязки к повышению эффективности систем автоматизации, а также отсутствие возможности точечной выправки железнодорожных путей.
Наиболее близким аналогом является способ диагностики продольного профиля железнодорожных путей сортировочного, описывающий содержание верхнего строения железнодорожных путей сортировочного парка и заключающийся в измерении скорости движения отцепов на сортировочной горке в выбранных с интервалом в 50 м контрольных точках пути движения отцепов, записи полученных результатов измерения, по показателю скорости каждого отцепа определяют значения ускорения на каждой контрольной точке, после чего по усредненным значениям ускорения определяют уклон участков пути по формуле: in=an+W (где in - уклон n-го участка пути, an - среднее ускорение на n-ом участке пути, W - суммарное удельное сопротивление движению отцепов в сортировочном парке), которое сравнивают с требуемым значением уклона участка пути и по результатам сравнения судят о его соответствии требуемому значению или необходимости выправки продольного профиля пути парка (RU 2779427 С1, E01B 35/00, B61J 3/02, B61L 17/02, 06.09.2022).
Известный способ не обеспечивает в автоматическом режиме формирования таблицы выправки для автоматизированной передачи в службу ремонта пути, то есть автоматическое создание программных заданий о необходимости выправки профиля с локализацией участков железнодорожных путей сортировочного парка, а также погрешности данных видеоаналетики, поскольку диагностику проводят без учета сверхнормативного уклона.
Технический результат предлагаемого способа заключается в повышении уровня процесса контроля за техническим состоянием верхнего строения рельсового пути без закрытия и освобождения путей сортировочного парка за счет принятия решения о соответствии или несоответствия продольного профиля участка пути установленным требованиям с учетом сверхнормативного уклона и накопления нормального распределения данных скорости движения отцепов на каждом участке пути и автоматизации процесса контроля за техническим состоянием верхнего строения рельсового пути сортировочного парка.
Технический результат достигается тем, что в способе содержания верхнего строения железнодорожных путей сортировочного парка, заключающийся в том, что измеряют скорости движения каждого отцепа на пути движения в сортировочном парке в выбранных с заданным интервалом контрольных точках, данные о которых учитывают для принятия решения о соответствии или несоответствия продольного профиля участка пути установленным требованиям, согласно изобретению для каждого участка пути движения каждого отцепа осуществляют выборку данных скоростей в контрольных точках участка, вычисляют абсолютное изменение квадратов скоростей движения каждого отцепа на каждом n участке по формуле  где
где  - квадрат скорости отцепа на выходе n-го участка,
- квадрат скорости отцепа на выходе n-го участка,  - квадрат скорости отцепа на выходе (n - 1)-го участка, и при накоплении нормального распределения данных
- квадрат скорости отцепа на выходе (n - 1)-го участка, и при накоплении нормального распределения данных  отцепов на каждом участке пути с учетом значения W среднего суммарного удельного сопротивления движению отцепа в сортировочном парке определяют состояние участков пути с повышенным уровнем ускорения, если выполняется условие:
отцепов на каждом участке пути с учетом значения W среднего суммарного удельного сопротивления движению отцепа в сортировочном парке определяют состояние участков пути с повышенным уровнем ускорения, если выполняется условие:

где  - ускорение силы тяжести вращающихся частиц,
- ускорение силы тяжести вращающихся частиц,
 - заданная длина участка пути,
- заданная длина участка пути,
 - сверхнормативный уклон,
- сверхнормативный уклон,
и участков пути с отрицательным уровнем ускорения, если:
по результатам определения состояния участков пути сортировочного парка в автоматическом режиме формируют таблицу выправки для создания программного задания и автоматизированной её передачи в аппаратно-программное устройство службы ремонта пути.
В качестве критерия нормального распределения используют t-критерий Стьюдента.
Предлагаемое техническое решение обеспечивает автоматическое формирование программных заданий о необходимости выправки профиля с локализацией участков железнодорожных путей сортировочного парка для повышения эффективности и безопасности систем автоматизации процесса расформирования составов на основе данных о скоростях движения вагонов.
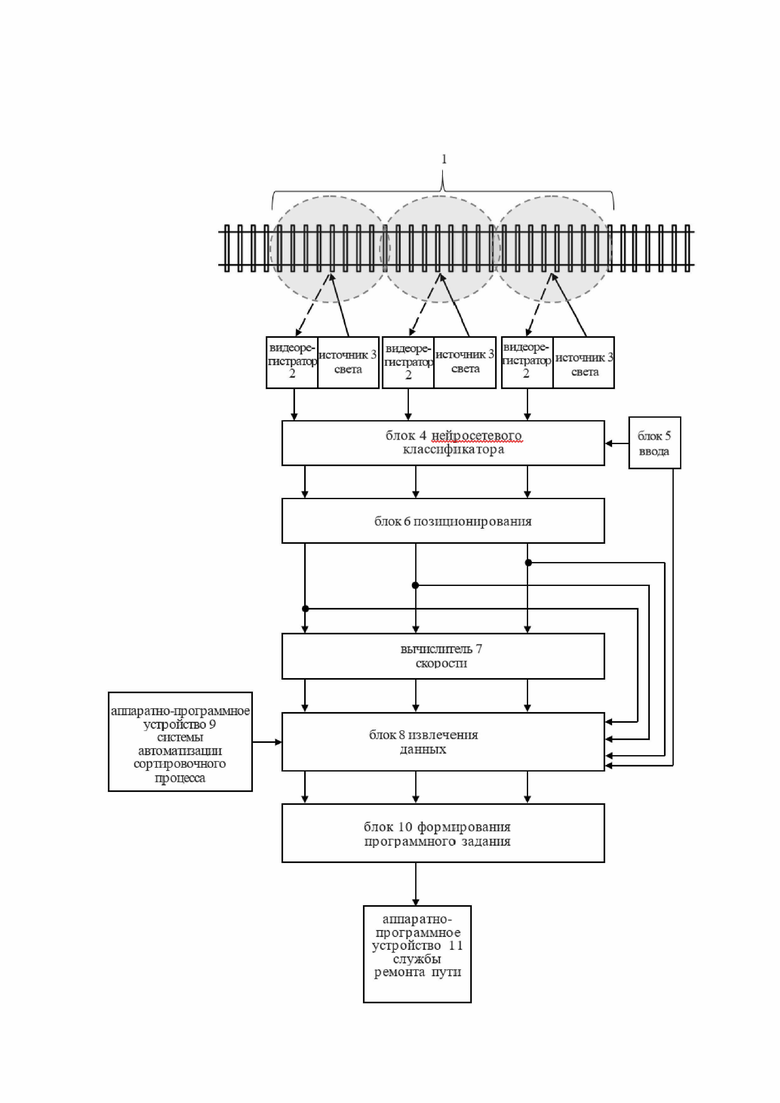
Предлагаемый способ реализует система содержания верхнего строения железнодорожных путей сортировочного парка, структурная схема которой представлена на чертеже.
Система содержания верхнего строения железнодорожных путей сортировочного парка в области 1 контроля содержит n видеорегистраторов 2, например, цилиндрические камеры видеонаблюдения, и n источников 3 света, например, светодиоды видимого и инфракрасного излучения.
Область 1 контроля, включающая полезную длину сортировочных путей (от выхода из прицельной тормозной позиции до предельного столбика выходной горловины), покрывается областями видимости видеорегистраторов 2.
Источники 3 света размещены под наклоном над железнодорожными путями таким образом, чтобы область видимости всех видеорегистраторов 2 перекрывала всю область 1 контроля. Источники 3 света и видеорегистраторы 2 размещены, например, на существующих опорах, ригелях или мачтах освещения сортировочного парка. Источники 3 света обеспечивают необходимый уровень освещенности для работы видеорегистраторов 2. Выходы каждого видеорегистратора 2 через последовательно соединенные блок 4 нейросетевого регистратора, блок 6 позиционирования и вычислитель 7 скорости, подключен к соответствующему входу блок 8 извлечения данных о движении отцепов на участках сортировочного парка, другие входы которого соединены с выходами блока 6 позиционирования и аппаратно-программного устройства 9 системы автоматизации сортировочного процесса, а выходы - с входами блока 10 формирования программного задания, выходом соединенного с аппаратно-программным устройством 11 службы ремонта пути. Ко входу управления блока 4 подключен блок 5 ввода данных, включающий, например, клавиатуру и сенсорный экран. Блок 5 ввода данных предназначен для предварительной настройки блока 4, а также блока 6 позиционирования и блока 8 извлечения данных о движении отцепов на участках сортировочного парка.
Система содержания верхнего строения железнодорожных путей сортировочного парка реализует предлагаемый способ следующим образом.
Согласно Методике аттестации железнодорожных станций с автоматизированными горками утв. ОАО «РЖД» 15 декабря 2017 г. №1339, при уклоне продольного профиля i > 0,7‰ роспуск становится небезопасным (подвижной состав может самопроизвольно ускоряться в парке и скорость соединения превышает 5 км/ч), а при i < 0,4‰ - неэффективным (отцепы останавливаются без объединения на путях сортировочного парка). Кроме того, при следовании вагонов на тележках с кассетными подшипниками при малом уклоне (i < 0,4‰) возникает опасность самопроизвольного движения в сторону сортировочной горки.
В области 1 контроля размещают видеорегистраторы 2 с источниками 3 света. Диагностику в области 1 контроля фактического состояния участков путей проводят на основе условия сверхнормативного уклона при следовании отцепов путем автоматической фиксации местоположения отцепов с использованием видеорегистраторов 2.
Данные с видеорегистраторов 2 в виде изображений видеокадров поступают на входы блока 4 нейросетевого классификатора.
В блоке 4 нейросетевого классификатора происходит автоматическое формирование точек координат местоположения отцепов на кадрах видеоизображений.
Для осуществления автоматического формирования координат отцепов блоком 4 нейросетевого классификатора необходимо заранее провести его обучение, которое осуществляется на этапе подготовки системы.
В качестве основы алгоритма обучения нейросетевого классификатора может использоваться математический аппарат глубокого обучения [Redmon J. et al. You only look once: Unified, real-time object detection // Proceedings of the IEEE conference on computer vision and pattern recognition. - 2016. - С. 779-788]. Для обучения блока 4 нейросетевого классификатора формируют обучающую выборку в виде набора изображений, поступающих от видеорегистраторов 2. Блок 5 используется для подготовки изображений (разметки), используемых при предварительном обучении блока 4 нейросетевого классификатора, а именно выделение областей с отцепами на кадрах, получаемых от блоков 2 видеорегистраторов.
Блок 4 нейросетевого классификатора формирует точки координат расположения отцепов в кадрах, получаемых от блоков 2 видеорегистраторов и передает их на вход блока 6 позиционирования. Блок 6 позиционирования предварительно калибруется через блок 5 ввода путем ввода матриц преобразования координат, получаемых от блока 4 нейросетевого классификатора, к координатам местоположения на сортировочных путях.
Блок 6 позиционирования формирует данные о расположении (сигналы позиционирования) отцепов на каждом участке каждого пути сортировочного парка - точек местоположения отцепов на изображении в реальные расстояния на конкретном участке конкретного пути. Данные позиционирования (местоположения) поступают на вход вычислителя 7 скорости и на вход блока 8 извлечения данных о движении отцепов на участках сортировочного парка.
Вычислитель 7 скорости вычисляет разность позиций отцепов в текущий и предыдущий моменты времени на основе изменения их местоположения во времени посредством получаемых от блока 6 сигналов позиционирования отцепов на путях сортировочного парка, и формируют значения скоростей отцепов, находящихся на каждом участке пути.
С выходов вычислителя 7 данные о скоростях отцепов поступают на блок 8 извлечения данных о движении отцепов на участках сортировочного парка.
На основе данных позиционирования и значений скоростей отцепов в области 1 контроля в блоке 8 определяют участки путей с повышенным критерием ускорения.
Известно, что критерий повышенного ускорения определяется на основе условия сверхнормативного уклона при следовании подвижных единиц (исходя из см. Муха Ю.А., Бобровский В.И. Алгоритмы и библиотека программ для моделирования на ЭВМ «Наири-К» сортировочного процесса на горках // Механизация и автоматизация сортировочного процесса на станциях: Межвуз. сб. науч. трудов. - 1977. - №194/11. - С. 53-102) по формуле:

где  - квадрат скорости отцепа на выходе n-го участка, которую определяют в вычислителе 7 на основе сигналов позиционирования;
- квадрат скорости отцепа на выходе n-го участка, которую определяют в вычислителе 7 на основе сигналов позиционирования;
 - квадрат скорости отцепа на выходе (n - 1)-го участка, которую определяют в вычислителе 7 на основе сигналов позиционирования;
- квадрат скорости отцепа на выходе (n - 1)-го участка, которую определяют в вычислителе 7 на основе сигналов позиционирования;
 - ускорение силы тяжести вращающихся частиц (9,66 м/с2);
- ускорение силы тяжести вращающихся частиц (9,66 м/с2);
 - длина участка пути в области контроля (например, длина измеряемого участка равна 50 м);
- длина участка пути в области контроля (например, длина измеряемого участка равна 50 м);
W - среднее суммарное удельное сопротивление движению отцепа;
 - сверхнормативный уклон (0,7 ‰).
- сверхнормативный уклон (0,7 ‰).
W определяется на основании данных, получаемых от аппаратно-программного устройства 9 системы автоматизации сортировочного процесса (например, Шабельников А. Н., Соколов В. Н. КСАУ СП-новое направление автоматизации сортировочных горок // Автоматика, связь, информатика. - 2017. - №8. - С. 2-4).
При заходе каждого отцепа на путь в области 1 контроля видеорегистраторов 2 данные о характеристиках каждого отцепа: массе и длине, передаются в блок 8 от аппаратно-программного устройства 9.
В блоке 8 по команде блока 5 на основе данных о характеристиках отцепов, формирует таблицу соответствия W весу (весовой категории) и длине (количеству отцепов), содержащая характеристики соответствия сопротивления движения отцепов их длине и массе, и передает их в блок 10. Общий вид таблицы представлен в таблице 1.
Таблица 1. Общий вид таблицы соответствия сопротивления движения отцепов их длине и массе (mi - масса подвижной единицы, lj - длина подвижной единицы, Wij - среднее суммарное удельное сопротивление движению отцепа массой mi и длиной lj)
В блоке 8 область 1 контроля логически разделяется на измеряемые n участки с заданным интервалом, границы которого являются контрольными точками (размер интервала выбирается эмпирически на основе качества детализации данных от блоков 6 и 7 и может быть условно принят равным 50 м).
В контрольных точках блок 8 измеряет скорости движения каждого отцепа на пути в сортировочном парке, данные о которых учитывают при принятии решения о соответствии или несоответствия продольного профиля участка пути установленным требованиям.
Согласно (1) критерий повышенного ускорения исходя из скорости примет условие:

где  - абсолютное изменение квадратов скоростей движения каждого отцепа на каждом n участке.
- абсолютное изменение квадратов скоростей движения каждого отцепа на каждом n участке.
На основе анализа полученных данных о характеристиках отцепов, их координатах и скоростях в единицу времени блок 8 формирует данные о скоростях отцепов в контрольных точках каждого участка пути в области 1 контроля видеорегистраторов 2. В блоке 8 производят сохранение данных о скоростях на каждом участке расположения отцепов. В блоке 8 для исключения выбросов определения скорости за счет погрешности данных видеоаналитики собирается статистика на каждом участке до накопления нормального распределения. За критерий нормальности распределения можно использовать критерий Стьюдента.
Таким образом, в блоке 8 для каждого участка пути движения каждого отцепа осуществляют выборку данных скоростей в контрольных точках участка и вычисляют  .
.
Блок 8 передает данные и W в контрольных точках участков в блок 10 формирования программного задания на выправку.
В блоке 10 собираются данные от блока 8 для каждого участка каждого пути до тех пор, пока не будет удовлетворен критерий нормального распределения для каждого анализируемого участка.
К примеру, с учетом следования отцепов длиной 14 метров и массой 100 тонн (хороших бегунов, W = 0,5 Н/кН) по участкам - формула (1) примет вид:
С учетом второго критерия ненормативного уклона - отрицательного ускорения, - формула для участка, профиль которого требует выправки, примет условие:
В блоке 10 проверяется условия (2) или (3) для медианного значения  всех отцепов, прошедших за период расчета критерия Стьюдента на измеряемом участке.
всех отцепов, прошедших за период расчета критерия Стьюдента на измеряемом участке.
При накоплении нормального распределения данных каждого отцепа на каждом участке пути с учетом его значения W среднего суммарного удельного сопротивления движению в сортировочном парке определяют состояние участков пути с повышенным уровнем ускорения, если выполняется условие (2), и участков пути с отрицательным уровнем ускорения, если выполняется условие (3).
На основании координат участков области 1 контроля, не удовлетворяющих условию (2) или (3), в блоке 10 в автоматическом режиме формируют таблицу выправки, содержащую данные об участках путей, профили которых подлежат приведению к нормам содержания согласно Своду правил «Станционные здания, сооружения и устройства» СП 225-2014 (пп. 5.12, 5.13, 5.22) для недопущения самопроизвольного ускорения или остановки. Общий вид таблицы выправки представлен в таблице 2.
Таблица 2. Общий вид выправочной таблицы для служб 11 ремонта пути (Aij - отметка о состоянии участка пути - принимает 2 значения: «Норма» или «Требуется выправка»)
На основании таблицы 2 блок 10 формирует в автоматическом режиме программное задание для точечной выправки профиля путей сортировочного парка, которое автоматизировано передает в аппаратно-программное устройство 11 службы ремонта пути.
Таким образом, предлагаемый способ обеспечивает повышении уровня процесса контроля за техническим состоянием верхнего строения рельсового пути без закрытия и освобождения путей сортировочного парка, и, как следствие, повышение эффективности обследования, безопасности движения отцепов и сокращение времени определения участков рельсовых путей сортировочного парка, подлежащих ремонтным работам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностики продольного профиля железнодорожных путей сортировочного парка | 2022 |
|
RU2779427C1 |
| Устройство для позиционирования и определения скорости железнодорожных подвижных единиц | 2020 |
|
RU2738768C1 |
| Система контроля и управления заграждающими устройствами | 2024 |
|
RU2830327C1 |
| СИСТЕМА ФОРМИРОВАНИЯ МНОГОГРУППНЫХ СОСТАВОВ | 2010 |
|
RU2452643C1 |
| Устройство счета железнодорожных подвижных единиц | 2022 |
|
RU2779670C1 |
| Способ и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки | 2019 |
|
RU2705035C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 1988 |
|
RU2028238C1 |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ СОРТИРОВОЧНЫХ СТАНЦИЙ НАПРАВЛЕНИЯ ЖЕЛЕЗНОДОРОЖНОЙ СЕТИ | 2012 |
|
RU2500558C1 |
| Способ определения ходовых свойств вагонов для корректировки работы подсистемы автоматического роспуска составов горочного комплекса | 2018 |
|
RU2689668C1 |
Изобретение относится к диагностике верхнего строения рельсового пути. Способ содержания верхнего строения железнодорожных путей сортировочного парка заключается в том, что измеряют скорости движения каждого отцепа на пути движения в сортировочном парке в выбранных с заданным интервалом контрольных точках. При этом для каждого участка пути движения каждого отцепа осуществляют выборку данных скоростей в контрольных точках участка, вычисляют абсолютное изменение квадратов скоростей движения каждого отцепа на каждом n участке. При накоплении нормального распределения данных абсолютных изменений квадратов скоростей отцепов на каждом участке пути с учетом значения среднего суммарного удельного сопротивления движению отцепа в сортировочном парке определяют состояние участков пути с повышенным уровнем ускорения и участков пути с отрицательным уровнем ускорения. По результатам определения состояния участков пути сортировочного парка в автоматическом режиме формируют таблицу выправки для создания программного задания и автоматизированной её передачи в аппаратно-программное устройство службы ремонта пути. Технический результат заключается в повышении уровня процесса контроля за техническим состоянием верхнего строения рельсового пути без закрытия и освобождения путей сортировочного парка. 1 ил., 2 табл.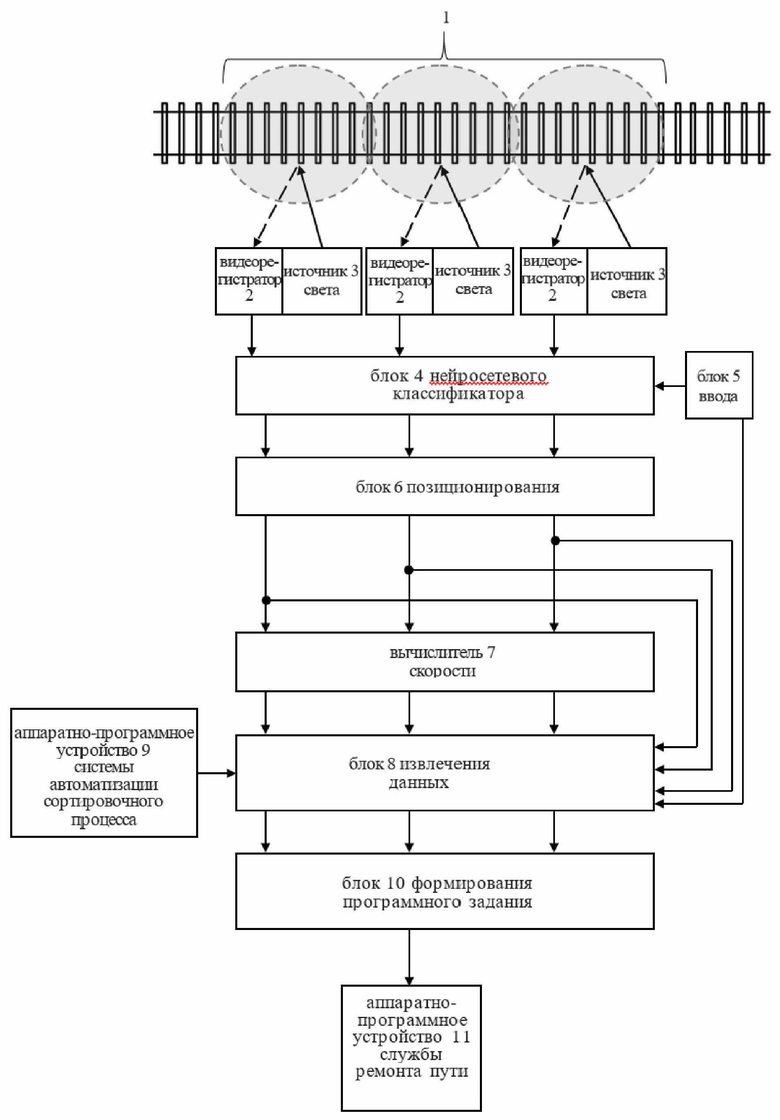
Способ содержания верхнего строения железнодорожных путей сортировочного парка, заключающийся в том, что измеряют скорости движения каждого отцепа на пути движения в сортировочном парке в выбранных с заданным интервалом контрольных точках, данные о которых учитывают для принятия решения о соответствии или несоответствия продольного профиля участка пути установленным требованиям, отличающийся тем, что для каждого участка пути движения каждого отцепа осуществляют выборку данных скоростей в контрольных точках участка, вычисляют абсолютное изменение квадратов скоростей движения каждого отцепа на каждом n участке по формуле  , где
, где  - квадрат скорости отцепа на выходе n-го участка,
- квадрат скорости отцепа на выходе n-го участка,  - квадрат скорости отцепа на выходе (n - 1)-го участка, и при накоплении нормального распределения данных
- квадрат скорости отцепа на выходе (n - 1)-го участка, и при накоплении нормального распределения данных  отцепов на каждом участке пути с учетом значения W среднего суммарного удельного сопротивления движению отцепа в сортировочном парке определяют состояние участков пути с повышенным уровнем ускорения, если выполняется условие
отцепов на каждом участке пути с учетом значения W среднего суммарного удельного сопротивления движению отцепа в сортировочном парке определяют состояние участков пути с повышенным уровнем ускорения, если выполняется условие
 ,
,
где  - ускорение силы тяжести вращающихся частиц,
- ускорение силы тяжести вращающихся частиц,
 - заданная длина участка пути,
- заданная длина участка пути,
 - сверхнормативный уклон,
- сверхнормативный уклон,
и участков пути с отрицательным уровнем ускорения, если
 ,
,
по результатам определения состояния участков пути сортировочного парка в автоматическом режиме формируют таблицу выправки для создания программного задания и автоматизированной её передачи в аппаратно-программное устройство службы ремонта пути.
| Способ диагностики продольного профиля железнодорожных путей сортировочного парка | 2022 |
|
RU2779427C1 |
| CN 111855693 A, 30.10.2020 | |||
| СПОСОБ ИЗМЕРЕНИЯ И ИЗОБРАЖЕНИЯ ГЕОМЕТРИИ ПУТИ СИСТЕМЫ РЕЛЬСОВОГО ПУТИ | 2015 |
|
RU2682953C2 |
| DE 19736711 C1, 12.11.1998. | |||

