Изобретение относится к электротехнике и автоматике и может быть использовано при создании систем управления магнитострикционными механизмами для прецизионных перемещений.
Известен способ управления пьезомагнитным двигателем, заключающийся в формировании и снятии импульсов заданной величины источником напряжения [1] .
Недостаток способа в том, что для изменения величины перемещения меняют величину управляющего воздействия, при этом наблюдается высокая колебательность пьезомагнитного стержня.
Наиболее близким к заявляемому способу, выбранному за прототип, является способ управления пьезодвигателем, заключающийся в формировании и снятии ступени дополнительного продольного управляющего поля, запаздывающего на половину периода свободных колебаний пьезодвигателя от ступени основного продольного управляющего поля [2].
Недостаток способа заключается в том, что использовать его полностью для магнитострикционного механизма невозможно, поскольку, обладая четностью магнитомеханической характеристики при возвращении магнитострикционного механизма в исходное положение, последний будет колебаться с двойной частотой и двойной амплитудой.
Цель изобретения - уменьшение колебательности при возвращении в исходное положение.
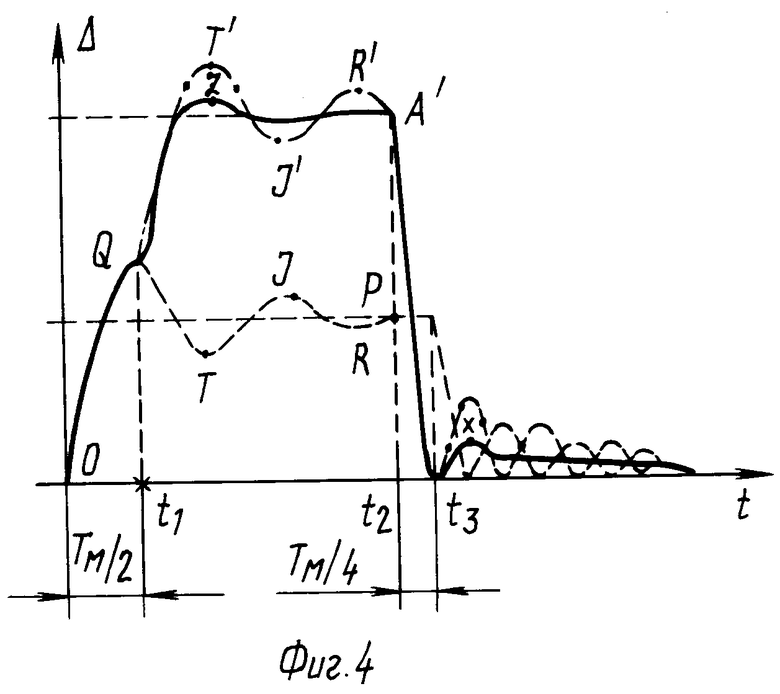
На фиг. 1 схематически изображен продольный разрез дискретного магнитострикционного механизма; на фиг.2 - следующие совмещенные зависимости; Hпрод1(t) - временная зависимость основного магнитного поля, здесь BCML - ступень основного магнитного поля; Нпрод2(t) - временная зависимость дополнительного магнитного поля, здесь DEFG - ступень, а GKLM - импульс длительности Тм/4 дополнительного магнитного поля; на фиг.3 - результирующая от влияния основного и дополнительного продольных полей петля OPAO магнитомеханического гистерезиса Δ (Нпрод); на фиг.4 - временная зависимость процесса позиционирования и возвращения в исходное положение магнитострикционного механизма Δ (t).
Устройство (фиг. 1) состоит из магнитострикционного элемента-трубки 1, намагничивающей секции 2, размещенной внутри магнитострикционной трубки, основной 3 и дополнительной 4 продольных обмоток, а также нагрузки 5.
Дискретный магнитострикционный механизм, реализующий способ управления, работает следующим образом.
При позиционировании нагрузки формируют ступень поля с помощью основной обмотки намагничивания, а затем с запаздыванием на половину периода свободных колебаний магнитострикционного механизма Тм/2 формируют ступень поля с помощью дополнительной продольной обмотки намагничивания, при этом основной Ф1 и дополнительный Ф2 магнитные потоки как в намагничивающей секции, так и в магнитострикционной трубке имеют одинаковые направления. Перемещение нагрузки происходит безколебательно (фиг.4). При возвращении в исходное положение формируют импульс дополнительного продольного поля длительности Тм/4, противоположного по знаку и равного по величине ступени основного поля. На время Тм/4 основной Ф1 и дополнительный Ф2 магнитные потоки противоположны друг другу. Магнитострикционный элемент-трубка начнет возвращаться в исходное положение. Снятие ступени основного магнитного поля и импульса дополнительного магнитного поля не приводит к колебательности магнитострикционного механизма из-за взаимного уничтожения переходных процессов (фиг.4). Для изменения величины перемещения необходимо пропорционально изменять величину ступени основного и ступени и импульса дополнительного магнитных полей.
Способ управления состоит в следующем.
Если для формирования ступени основного продольного магнитного поля требуется двухуровневый источник тока, то для формирования ступени и импульса дополнительного магнитного поля необходим трехуровневый источник тока.
По фронту BC (фиг.2) ступени BCML основного продольного магнитного поля Нпрод1 магнитострикционный элемент должен перемещаться с перерегулированием OQТIRP, при этом рабочая точка магнитомеханической петли Δ (Нпрод) должна двигаться по кривой OP с колебанием вокруг т.Р. По фронту DE ступени DEFG дополнительного магнитного поля Нпрод2 элемент должен перемещаться с перерегулированием QT'I'R'A', а рабочая точка должна двигаться по кривой PA и осуществлять колебание вокруг т.A. В результате сдвига фронтов ступени основного и дополнительного магнитных полей на Тм/2 суммарное перерегулирование прекратится за время Тм, а магнитострикционный механизм будет осуществлять процесс позиционирования нагрузки по кривой OQZA'. Срез FG ступени дополнительного магнитного поля за четверть периода свободных колебаний до среза ступени ML основного магнитного поля и установление на эту четверть периода равных по величине и противоположных по знаку величин продольных магнитных полей приводит к перемещению магнитострикционного механизма по кривой A't3 и перемещению рабочей точки по кривой AO. В результате одновременного снятия до нуля ступени ML основного магнитного поля и импульса LM дополнительного магнитного поля происходит взаимогашение колебаний и магнитострикционный механизм переместится в исходное положение, соответствующее т.O по кривой t3XO без перерегулирования.
Таким образом, представленный способ управления дискретным магнитострикционным механизмом позволяет возвращать нагрузку в исходное положение безколебательно за счет формирования на время Тм/4 основного и дополнительного магнитных полей противоположных по знаку и равных по величине магнитных потоков Ф1 = |Ф21| .
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЗИЦИОННОГО УПРАВЛЕНИЯ СТРИКЦИОННЫМ МЕХАНИЗМОМ | 1989 |
|
RU2012031C1 |
| СПОСОБ УПРАВЛЕНИЯ СТРИКЦИОННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1989 |
|
SU1734556A1 |
| Способ управления магнитострикционным шаговым исполнительным устройством | 1988 |
|
SU1616488A1 |
| СПОСОБ УПРАВЛЕНИЯ СТРИКЦИОННЫМ МЕХАНИЗМОМ | 1992 |
|
RU2068574C1 |
| МАГНИТОСТРИКЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2074456C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ | 1995 |
|
RU2121658C1 |
| МАГНИТОСТРИКЦИОННЫЙ ИСПОЛНИТЕЛЬНЫЙ ЭЛЕМЕНТ | 1992 |
|
RU2045125C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2171967C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2117914C1 |
| ИЗМЕРИТЕЛЬ СОДЕРЖАНИЯ ФЕРРОМАГНИТНЫХ ВКЛЮЧЕНИЙ В СЫПУЧИХ СРЕДАХ | 2000 |
|
RU2192018C2 |



Использование: при создании систем управления магнитострикционными механизмами для прецизионных перемещений. Сущность: при позиционировании посредством магнитострикционного исполнительного элемента на него воздействует основным продольным магнитным полем в виде ступени и дополнительным продольным магнитным полем в виде ступени того же знака, запаздывающим на половину периода свободных колебаний позиционирующего механизма. При возвращении в исходное положение до снятия основного продольного поля снимают дополнительное продольное поле и одновременно подают импульс продольного поля, противоположного по знаку и равного по величине основному продольному полю длительностью, равной четверти периода свободных колебаний позиционирующего механизма. 4 ил.
СПОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ПОЗИЦИОНИРУЮЩЕГО МЕХАНИЗМА ДИСКРЕТНОГО ДЕЙСТВИЯ, заключающийся в том, что на исполнительный элемент воздействуют основным продольным полем в виде ступени и дополнительным продольным полем в виде ступени того же знака, запаздывающим на половину периода свободных колебаний позиционирующего механизма от основного продольного поля, отличающийся тем, что, с целью уменьшения колебательности на стадии возвращения в исходное положение при использовании в качестве исполнительного элемента магнитострикционного элемента, на время, равное четверти периода свободных колебаний позиционирующего механизма, до снятия основного продольного поля снимают дополнительное продольное поле в виде ступени и воздействуют на исполнительный элемент импульсом дополнительного продольного поля, противоположного по знаку и равного по величине основному продольному полю.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Никольский А.А | |||
| Точные двухканальные следящие электроприводы с пьезокомпенсаторами | |||
| М., Энергоатомиздат, 1988, с.76-82. | |||
