Изобретение относится к сборочному производству, в частности к сборочным конвейерным линиям.
Известна сборочная линия, которая для передачи изделий на рабочие места содержит систему продольных и поперечных транспортеров, взаимоувязанных перегружателями (авт.св. СССР N 1121127, кл. В 23 Q 41/00, 1983).
Недостатком данной линии является сложность транспортной системы и необходимость для ее работы системы автоматического адресования спутников.
Наиболее близкой по технической сущности к изобретению является выбранная в качестве прототипа сборочная линия, снабженная на каждой рабочей позиции тупиковым поперечным транспортером, двумя накопителями спутников с устройствами штабелирования последних и фиксатором-подъемником.
Данная линия для своей работы также требует систему автоматического адресования, с адресоносителями на спутниках и кодирующе-считывающими устройствами на рабочих позициях.
Цель изобретения - повышение надежности и упрощение конструкции за счет исключения системы адресования.
Это достигается тем, что в сборочной линии, содержащей распределительный конвейер, технологические участки на конвейере с параллельными рабочими местами, спутники, подъемники спутников на рабочих местах, накопители на конвейере с устройством штабелирования спутников, перегружатели, отсекатели и систему управления с контурами программного управления механизмами накопителей и подъемников для загрузки-выгрузки спутников, причем подъемники и накопители имеют подвижные штанги с захватным устройством для удержания спутников над конвейером, образующие вместе со спутниками П-образный контур над конвейером высотой и шириной больше соответствующих размеров спутника, накопители установлены по одному на входе каждого участка, а система управления снабжена на каждом рабочем месте по участкам блоком формирования управляющего сигнала в контур программного управления механизмами накопителя и подъемников для вызова спутника из накопителя этого участка для загрузки на подъемник, с устройством блокировки этих сигналов для остальных рабочих мест этого участка на время, большее интервала, необходимого на смену спутника и перемещения обработанного спутника на следующий участок.
В предлагаемой линии наличие общего накопителя для участка и устройства для вызова спутника из накопителя позволяет производить смену спутников на рабочих местах по запросу. Устройство блокировки таких вызовов с других рабочих мест, а также использование подъемников спутников на рабочих местах позволяет обработанным спутникам беспрепятственно выйти за пределы технологического участка, а новому спутнику транзитом пройти предыдущие рабочие места. Тем самым в предлагаемой линии отсутствует необходимость в системе автоматического адресования, с адресоносителями на спутниках и кодирующе-считывающими устройствами на рабочих местах.
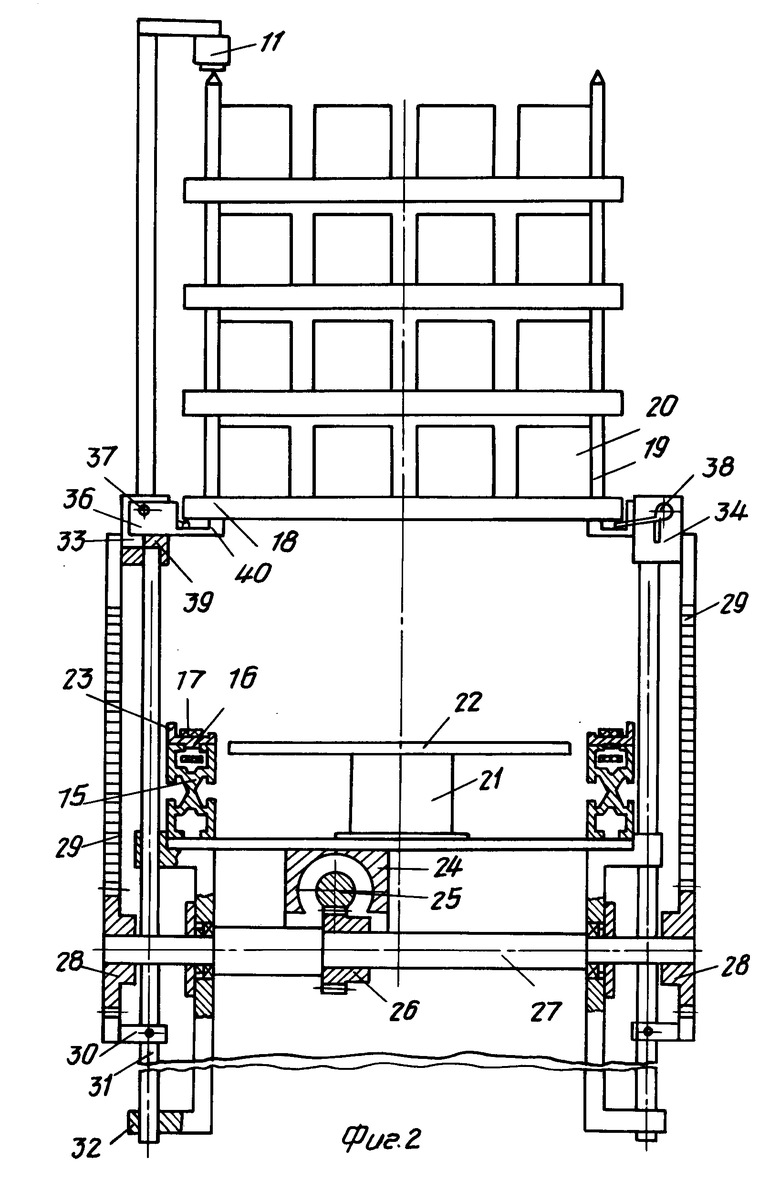
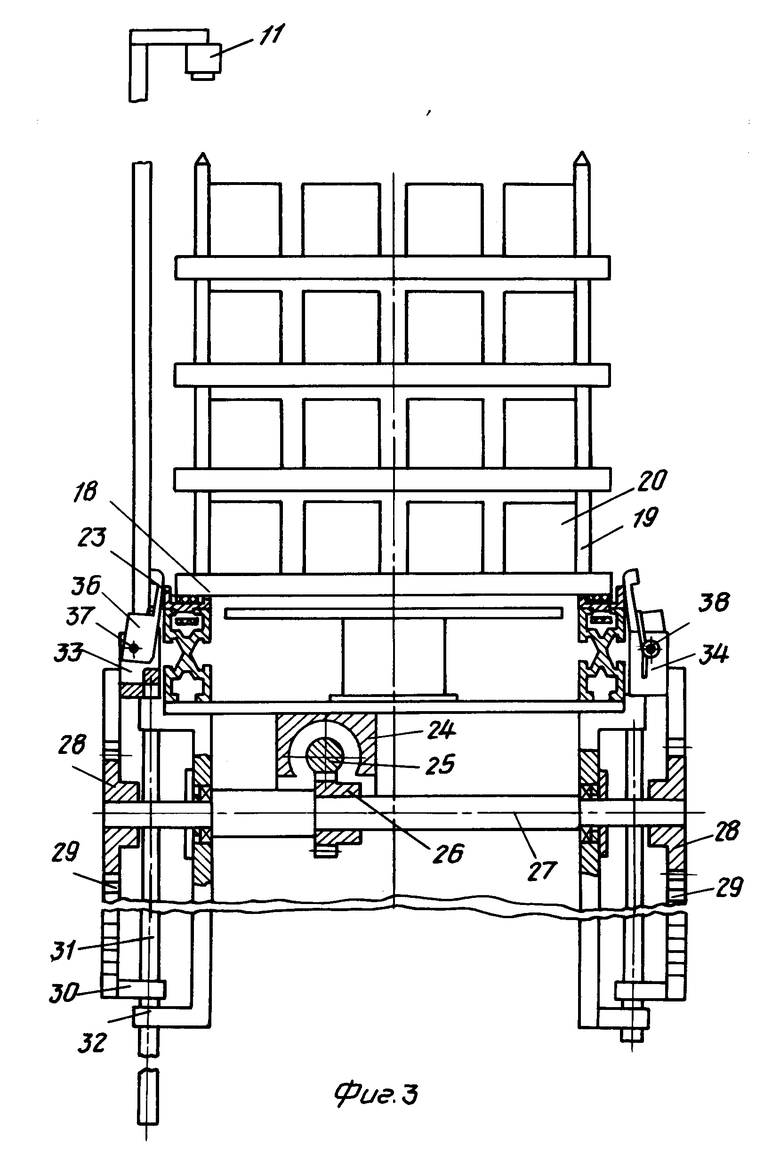
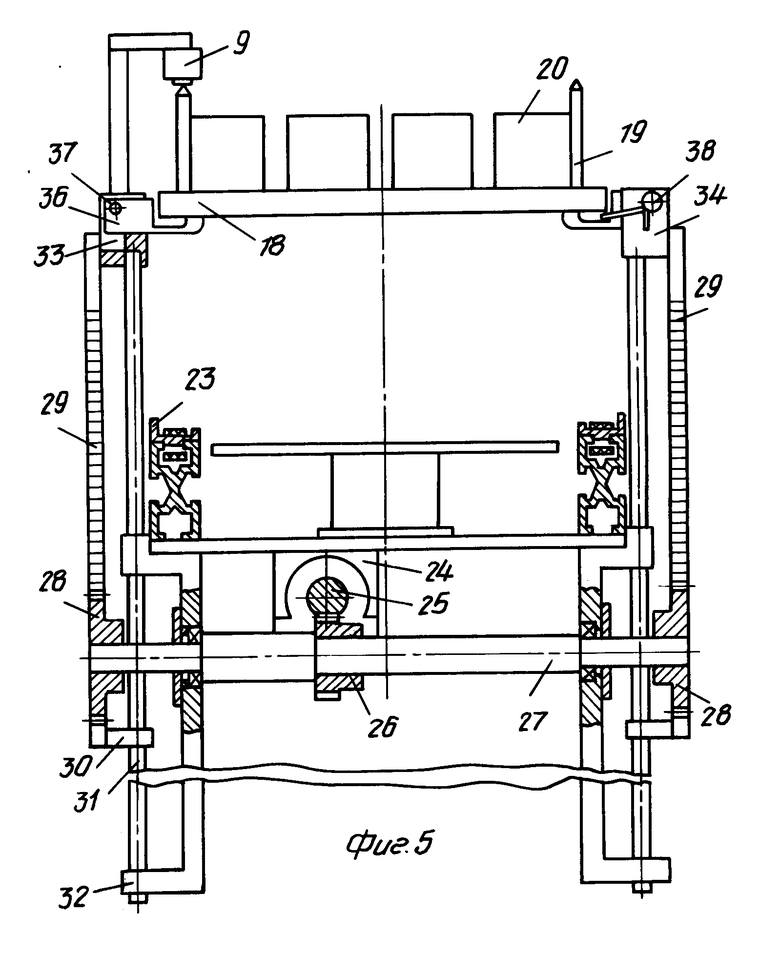
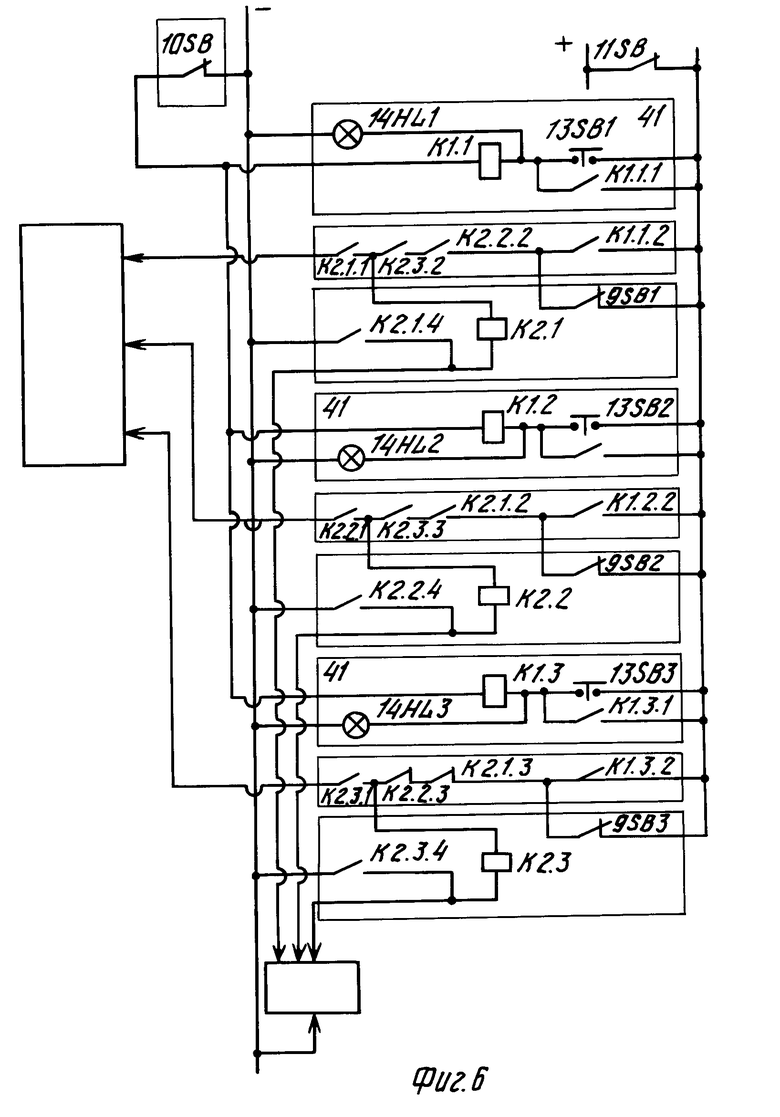
На фиг. 1 представлена сборочная линия, общий вид; на фиг.2 - накопитель, общий вид, верхнее положение спутников; на фиг.3 - то же, нижнее положение спутников; на фиг.4 - накопитель, план; на фиг.5 - подъемник, общий вид; на фиг.6 - схема блока формирования сигналов для вызова спутников из накопителя с устройством блокировки для первого участка линии; на фиг.7 - схема последовательного временного коммутатора.
Сборочная линия состоит из распределительного конвейера 1 и по техпроцессу разделена на несколько технологических участков, например на два участка. Участки включают параллельные рабочие места 2 для первого участка и 3 - для второго, на которых для каждого участка выполняется своя определенная технологическая операция.
В начале каждого участка установлен накопитель 4 спутников с отсекателем 5 на выходе и 6 на входе, на рабочих местах - подъемники 7 с отсекателем 8 и датчиками 9 наличия спутника на подъемнике, в конце участка - датчик-сигнализатор 10 о выходе обработанного спутника с участка. Накопители 4 снабжены датчиками 11, аналогичными датчикам 9, для сигнализации о полном накопителе, а также датчики наличия хотя бы одного спутника в накопителе. Кроме того, перед всеми отсекателями также установлены датчики наличия спутников перед этими отсекателями.
Линия снабжена системой управления, с контурами программного управления механизмами накопителей и подъемников для загрузки-выгрузки спутников. На каждом рабочем месте 2, 3 установлен блок 12 формирования управляющего сигнала в контур программного управления механизмами накопителей и подъемников для вызова спутника из накопителя участка для загрузки на подъемник, с устройством блокировки этих сигналов для остальных рабочих мест этого участка на время, большее интервалу, необходимому на смену спутника и перемещения обработанного спутника на следующий участок. Блок 12 содержит выключатель 13 и лампочку 14.
Конвейер 1, выполненный, например, в виде двухленточного транспортера (фиг. 2) включает несущий профиль 15 с направляющими уголками 16 и транспортные ленты 17, перемещающиеся с использованием приводной и концевой станций (не показаны).
Технологические спутники 18 выполнены в виде пластин с колонками 19 сверху и соосными колонкам отверстиями снизу для установки спутников друг на друга в штабель. На спутниках установлены в гнездах обрабатываемые изделия 20.
Накопители 4 и подъемники 7 имеют аналогичную конструкцию и включают наряду с отсекателями 5, 6 и 8 устройство штабелирования спутников, выполненное в виде пневмоцилиндра 21 с площадкой 22, механизма подъема спутников с захватным устройством и упоров 23, установленных по бокам конвейера, в качестве которых в линии используются вертикальные полки направляющих уголков 16. Высота подъема площади 22 устройства штабелирования установлена с возможностью поднятия нижнего спутника 18 на уровень не ниже второго снизу спутника в штабеле, когда штабель расположен на лентах 17.
Механизм подъема спутников 18 выполнен в виде пневмоцилиндра 24 с поршень-рейкой 25, соединенной с шестерней 26, установленной на валу 27, по концам которого закреплены две шестерни 28, взаимодействующие с рейками 29, связанными с помощью планок 30 со штангами 31, несущими захватное устройство и установленными в кронштейнах 32 накопителя 4 с возможностью возвратно-поступательного перемещения от поршень-рейки 25.
Захватное устройство содержит планки 33, 34 (фиг.4), закрепленные на штангах 31 в верхней их части, с ушками 35 по краям, в которых установлены поворотные собачки 36 на осях 37. Собачки 36 пружинами 38 поджимаются к упорам 39 планок 33, 34, имеют в верхней части выступ 40 и установлены в планках 33, 34 с возможностью взаимодействия с упорами 23, охватывая их с наружной стороны при нижнем положении штанг 31 (фиг.3) и с возможностью взаимодействия со вторым спутником 18 в штабеле при поднятии собачек 36 на штангах 31 до уровня нижней плоскости пластины второго спутника 18 путем захвата второго спутника 18 и штабеля в целом выступами 40 собачек 36.
Штанги 31 в кронштейнах 32 относительно направляющих уголков 16 и величина возвратно-поступательного перемещения штанг 31 от поршень-рейки 25 установлены таким образом, что штанги 31 (в верхнем положении) с захватным устройством и спутником 18 образуют П-образный контур над конвейером 1 высотой и шириной больше соответствующих размеров спутника, т.е. спутники 18 могут беспрепятственно проходить под штабелем спутников 18.
Блок 12 формирования управляющего сигнала в систему управления для вызова спутника на подъемник рабочего места, например электронное (фиг.6), включает цепь формирования управляющего сигнала и устройство блокировки таких сигналов для остальных рабочих мест одного участка.
На фиг. 6 используются следующие обозначения: для включателей 13, датчиков и ламп цифры перед буквами соответствуют обозначениям элементов на фиг. 1, цифры после букв обозначают для включателей и датчиков номер рабочего места на участке линии, для реле и его контактов - номер реле в схеме, номер рабочего места и номер контакта реле.
Цепь формирования управляющего сигнала блока 12, например, для первого рабочего места 2 первого участка линии включает в ячейку памяти запроса на смену спутника, состоящую из кнопочного включателя 13 (13SBI), реле К 1.1 c шунтирующим включатель 13SBI нормально разомкнутым контактом К.1.1.1 и лампочку 14 (14HLI), и собственно цепь управляющего сигнала, образованную нормально разомкнутым контактом К 1.1.2 реле К 1.1, нормально-разомкнутым контактом К 2.1.1 реле К 2.1 и нормально-замкнутыми контактами К 2.2.2, К 2.3.2 реле К 2.2, К 2.3, входящие в устройство 12 других рабочих мест 2 первого участка.
Устройство блокировки управляющих сигналов с других рабочих мест 2 первого участка для первого рабочего места включает реле К 2.1 с нормально-разомкнутым контактом К 2.1.1 в цепи управляющего сигнала, нормально-замкнутыми контактами К 2.1.2, К 2.1.3, включенными в цепь формирования управляющих сигналов второго и третьего рабочих мест 2, нормально-разомкнутых контактом К 2.1.4 в цепи самоблокировки реле К 2.1, датчик 10 (10SB), например нормально-замкнутый контактный микровыключатель, и датчик 9 (9SBI), например также нормально-замкнутый микровыключатель.
Датчик 10SB включен в цепь питания реле К 1.1, датчик 9SBI включен параллельно контакту K 1.1.2 реле K 1.1. Датчики 9 на подъемниках 7 и 19 в конце участков установлены для сигнализации о том, что смена спутника на подъемниках 7 произведена, а обработанный спутник вышел с данного участка на следующий. Аналогичным образом построены и включены элементы блоков 12 для второго, третьего и т.д., n-го рабочих мест. Например, ячейка памяти запроса на смену спутника для второго рабочего места включает включатель 13SB2, реле K 1.2 с контактами K 1.2.1, K 1.2.2 и лампочку 14HL2, для третьего рабочего места - 13SB3, K 1.3, K 1.3.1, K 1.3.2, 14НL3 соответственно, для n-го рабочего места - 13SBn, K 1.n, K 1.n.I, K I.n.2, 14НLn и т.д.
При увеличении числа рабочих мест на участке увеличивается и количество нормально замкнутых контактов в цепи управляющего сигнала, например для первого рабочего места K 2.2.2, K 2.3.2, ..., K 2.n.2 и т.д.
Для предупреждения одновременной подачи в систему управления линией управляющих сигналов с нескольких рабочих мест обмотки реле K 2.1, K 2.2, K 2.3 подключены через последовательно временной коммутатор 41 (фиг.6) например электромеханический ламельного типа (фиг.7) или электронный.
Питание блоков 12 для первого участка производится через нормально-замкнутый контакт 11SB датчика 11, аналогичного датчику 9.
Линия работает следующим образом.
Штабель спутников 18 с изделиями, подлежащими сборке, загружается на вход А (фиг.1) конвейера 1 с центральной транспортно-накопительной системы, например с использованием робокара, и перемещается до отсекателя 6. При пустом накопителе по командам системы управления открывается отсекатель 6, штабель перемещается до отсекателя 5 и загружается в накопитель 4.
Для того, чтобы с момента включения линии на всех рабочих местах работы могли начаться одновременно, линия в конце работы должна оставаться в "состоянии на текущий момент", т.е. спутники 18 должны оставаться как в накопителях 4, так и на подъемниках 7. При этом контакты 9SBI, 9SB2, 9SB3 (фиг. 6) датчиков 9 разомкнуты спутниками 18 на подъемниках 7 и управляющие сигналы на смену спутников отсутствуют. Отсекатели 8 открыты, отсекатели 5, 6 - закрыты.
После обработки очередного спутника, например, на втором рабочем месте 2 первого участка линии оператор включает включатель 13SB2, при этом срабатывает реле K 1.2, которое через контакт K 1.2.1 становится на самоблокировку, и загорается лампочка 14НL2, сигнализирующая, что запрос на смену спутника принят. При неполном накопителе 4 второго участка линии микровыключатель 11SB замкнут и напряжение через замкнувшийся контакт K 1.2.2 реле K 1.2 через нормально замкнутые контакты K 2.1.2, реле K 2.1, K 2.3.3 реле K 2.3 подаются на обмотку реле K 2.2.
При замыкании коммутатором 41 цепи питания обмотки реле К 2.2 срабатывает, контактом K 2.2.4 становясь на самоблокировку, контактом K 2.2.1 подавая управляющий сигнал в контур программного управления механизмами накопителя 4 первого участка и подъемника 7 второго рабочего места, а контактами K 2.2.2 и K 2.2.3 размыкают цепи управляющих сигналов для первого и третьего рабочих мест участка. Так как на подъемнике 7 есть спутник 18, контакт 9SB2 датчика 9 разомкнут.
Если в это время необходимо сменить спутник на другом рабочем месте 2, например на третьем, включается включатель 13SB3, срабатывает реле K 1.3, загорается лампочка 14HL3 и замыкается контакт K 1.3.2, причем контакт 9SB3 датчика 9 разомкнут, так как на подъемнике 7 третьего рабочего места 2 есть спутник. Но так как разомкнут контакт K 2.2.3 реле K 2.2, управляющий сигнал к реле K 2.3 и в систему управления не проходит.
По управляющему сигналу со второго рабочего места 2 командами системы управления обработанный спутник 18 выгружается с подъемниками 7, конвейером 1 перемещается к накопителю 4 второго технологического участка и загружается в этот накопитель, причем при выходе спутника 18 из зоны подъемника 7 закрывается отсекатель 8. Одновременно новый спутник выгружается из накопителя 4 первого участка, перемещается конвейером 1 до отсекателя 8 и загружается на подъемник 7 второго рабочего места, после чего отсекатель второго рабочего места 2 открывается. Спутники 18 на первом и третьем рабочих местах подняты подъемниками 7 и не препятствуют перемещению обработанного и нового спутников 18 по конвейеру 1 при смене спутника на втором рабочем месте 2.
При выходе обработанного спутника за пределы первого участка срабатывает датчик 10, контакт 10SB размыкается и снимает реле K 1.2 с самоблокировки, при этом размыкается контакт K 1.2.2 этого реле. До загрузки нового спутника 18 нормально замкнутый контакт 9SB2 датчика 9 замкнут и шунтирует цепь контакта K 1.2.2, поэтому реле K 2.2 остается включенным. После загрузки нового спутника 18 срабатывает датчик 9 и размыкается его контакт 9SB2, реле K 2.2 обесточивается, контакты K 2.2.2 и K 2.2.3 замыкаются, разрешая прохождение управляющих сигналов на смену спутника от первого или третьего рабочего места первого участка.
Таким образом, датчик 10 в конце участка и датчики 9 на подъемниках 7 обеспечивают задержку управляющих сигналов на смену спутника с других параллельных рабочих мест участка на время, необходимое на смену спутника и перемещение обработанного спутника на следующий участок с рабочего места 2, управляющий сигнал с которого принят системой управления.
После прохождения обработанного спутника контакта 10SB датчики 10 опять остаются замкнутыми. При срабатывании датчиков 10 могут быть сняты сигналы запроса на смену спутников 18 на первом и третьем рабочих местах и потухнуть лампы 14НLI, 14НL3. В этом случае оператору необходимо повторно включить выключатель 13.
Аналогичным образом работает блок 12 для остальных рабочих мест, как для первого, так и второго участка линии. Необходимо отметить, что для первого рабочего места, например, первого участка, ближе всех расположенного к накопителю 4, при смене спутника на подъемнике 7 вначале срабатывает датчик 9, а затем 10. Однако реле K.2.1 отключается лишь при окончании полного цикла замены спутника 18 на подъемнике 7, так как контакты K 1.1.2 и 9SBI шунтируют друг друга и не имеет значения последовательность их размыкания.
При одновременном включении включателей 13 на нескольких рабочих местах очередность формирования управляющих сигналов определяется коммутатором 41, который последовательно замыкает цепи питания обмоток реле K 2.1, K 2.2, K 2.3.
При начальном запуске линии, когда спутники на подъемниках 7 отсутствуют, перед включением линии необходимо вручную включить контактные микровыключатели 9, разомкнув контакты 9SBI, 9SB2, 9SB3, после чего включить линию и вызвать спутники включением выключателей 13 на рабочих местах. Так как при начальном включении линии обработанные спутники 18 на подъемниках 7 отсутствуют и не выгружаются на конвейер 1, включение контактного микровыключателя 10 необходимо производить также вручную. В последующем линия работает автоматически и в конце работы остается в состоянии на текущий момент, т. е. спутники 18 остаются как на подъемниках 7, так и в накопителях 4.
Накопители 4 и подъемники 7, имеющие одинаковую конструкцию, работают следующим образом.
В исходном состоянии собачки 36 накопителя 4 на первом технологическом участке опущены вниз, охватывая упоры 23 с наружной их стороны. При поступлении в накопитель 4 штабеля спутников 18 собачки 36 поднимаются, в процессе движения под действием пружин 38 и гравитационных сил разворачиваются, огибая упоры 23, и выступами 40 заходят под пластину второго снизу спутника 18 в штабеле, при этом поворот собачек ограничивается упорами 39. При дальнейшем подъеме собачки 36 захватывают штабель без нижнего спутника 18 и поднимают его на своих выступах 40 на высоту относительно транспортных лент 17, большую высоты одного спутника 18, а нижний спутник остается на транспортных лентах перед отсекателем 5. Перемещение собачек 36 производится механизмом подъема спутников 18 от пневмоцилиндра 24 через поршень-рейку 25, шестерню 26, вал 27, шестерни 28, рейку 29 и штанги 31 с планками 33, 34, на которых закреплены собачки 36.
Для подачи спутника из накопителя 4 первого технологического участка на рабочую позицию 2 открывается отсекатель 5 и спутник 18, предварительно отделенный из штабеля, по конвейеру выходит из зоны накопителя 4, после чего отсекатель 5 закрывается. Для выгрузки следующего спутника 18 из штабеля площадка 22 устройства штабелирования пневмоцилиндром 21 поднимается, далее собачки 36 опускаются в нижнее положение, устанавливая штабель на площадку 22, затем площадка 22 опускается, после чего собачки 35 опять поднимаются в верхнее положение, поднимая штабель и отделяя от него нижний спутник 18. Необходимость манипуляционного движения площадки 22 обусловлена тем, что при опускании собачки 36 выходят из зацепления со спутниками 18 раньше, чем штабель устанавливается на транспортную ленту 17.
Загрузка спутников 18 в штабель в накопителе 4 второго технологического участка производится следующим образом. Спутник 18 конвейером перемещается с первого участка до отсекателя 6. Если не производится выгрузка спутника из накопителя 4, по команде системы управления отсекатель 6 открывается и спутник перемещается до отсекателя 5, после чего отсекатель 6 закрывается.
Далее площадка 22 вместе с загружаемым спутником 18 поднимается, затем собачка 36 со штабелем спутников 18 опускаются в нижнее положение, устанавливая штабель на загружаемый спутник 18, после чего собачки 36 опять поднимаются в верхнее положение, захватывая штабель с включением в него загружаемого спутника 18, и в конце цикла площадка 22 опускается.
Аналогичным образом загружается спутник 18 на подъемник 7, однако здесь он перемещается сразу до отсекателя 8 и на подъемник 7 загружается только один спутник 18, при этом спутник 18 колонкой 19 включает датчик 9, размыкая его контакт 9SB (фиг.6).
Для выгрузки спутника 18 из накопителя 4 второго технологического участка поднимается вверх площадка 22, собачки 36 опускаются, устанавливая штабель на площадку 22, затем площадка 22 опускается, после чего собачки 36 опять поднимаются в верхнее положение, поднимая штабель и отделяя от него нижний спутник 18, и затем открывается отсекатель 5.
Аналогичным образом производится выгрузка спутника 18 с подъемника 7.
Необходимо отметить, что конвейер может быть выполнен горизонтально или вертикально замкнутым, с прямой и обратной ветвями, соединенными перегружателями. В этом случае собранные изделия выгружаются со спутников на последнем технологическом участке, и пустые спутника поступают на начало А линии. Блок 12 формирования управляющих сигналов может быть выполнен другой конструкции, например в виде микрокомпьютерного контроллера, в этом случае блокировка управляющих сигналов с параллельных рабочих мест и загрузки времени задаются программным путем с использованием датчиков 9 и 10.
Такое выполнение сборочной линии позволяет производить развязку по обработанным и не обработанным изделиям для параллельных рабочих мест без использования системы автоматического адресования с адресоносителями на спутниках и кодирующе-считывающими устройствами на рабочих местах. Уменьшается также количество других функциональных агрегатов, относящееся к одному рабочему месту: вместо одного перегружателя, одного тупикового поперечного транспортера, двух накопителей и фиксатора для известной линии в предлагаемой необходим только один подъемник на рабочем месте и один накопитель на весь участок. Уменьшение количества используемых транспортно-накопительных агрегатов упрощает и необходимую систему управления механизмами этих агрегатов: в известной линии необходимо управление десятью приводами на каждом рабочем месте, в предлагаемой, с учетом общего накопителя - не более четырех. Уменьшается и необходимая производственная площадь за счет исключения поперечных транспортеров.


Использование: машиностроение, в частности автоматизированные сборочные линии. Сущность изобретения: система управления снабжена комплектом блоков 12 формирования сигналов запуска накопителя 4 и подъемника для загрузки - выгрузки спутника с устройствами блокировки таких сигналов с параллельных рабочих мест. Число блоков 12 и устройств блокировки равно числу рабочих мест 2, 3. Накопители 4 установлены по одному на входе каждого участка. 7 ил.
СБОРОЧНАЯ ЛИНИЯ, содержащая связанные между собой системой управления распределительный конвейер со спутниками, перегружателями, накопителями с устройством штабелирования и отсекателями, технологические участки, включающие параллельные рабочие места с подъемниками, причем подъемники и накопители выполнены со штангами, имеющими захватные устройства и образующими вместе со спутником над конвейером П-образный контур, высота и ширина которого больше размеров спутника, а система управления снабжена блоками программного управления механизмами линии, отличающаяся тем, что связь выполнена электрической, а система управления дополнительно включает в себя комплект блоков формирования сигналов запуска накопителя и подъемника для загрузки-выгрузки спутника с устройствами блокировки таких сигналов с параллельных рабочих мест, причем число таких блоков и устройств блокировки равно числу рабочих мест, а накопители установлены по одному на входе каждого участка.
| Авторское свидетельство СССР N 1564884, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
