Изобретение относится к области управления движением космических аппаратов (КА) с помощью реактивных двигателей (РД). Они могут быть использованы для управления движением КА, реактивные системы которых имеют двигатели с продольными осями, расположенными под углами к осям связанного базиса и не проходящими через центр масс КА. Такое расположение РД характерно для реактивных систем некоторых геостационарных спутников.
Известен способ управления реактивными двигателями КА - геостационарного спутника с линиями действия сил тяги, нормальными по отношению к осям связанного базиса, совпадающими с главными центральными осями инерции (см. [1] ).
Суть способа заключается в том, что управление вокруг центра масс КА ведется парами сил векторов тяги РД относительно всех трех главных центральных осей связанного базиса. Тем самым исключается искажение орбиты КА за счет нерасчетного перемещения его центра масс. А при коррекции орбиты в направлении вектора скорости КА (восток-запад) и в направлении, перпендикулярном его плоскости орбиты (север-юг), включается группа РД, векторы тяги которых после соответствующей ориентации КА строго совпадают с заданными направлениями коррекции. Причем двигатели расположены симметрично относительно осей связанного базиса, имеют фиксированную величину силы тяги и одинаковые расстояния до мест установки от центра масс. Поэтому в процессе коррекции они взаимно компенсируют возникающие номинальные (установленные) управляющие моменты, зависящие от их расположения. Следовательно, при обработке заданных величин линейной скорости в каждом из направлений и одновременно в двух парировать номинальные возмущающие моменты не требуется.
Блок-схема системы управления движением, реализующей способ-аналог, представлена на фиг. 1, где введены следующие обозначения:
1 - блок скорости коррекции (БСК);
2 - блок датчиков внешней информации для опорного базиса (БДВИ);
3 - блок определения управляющих сил и моментов на РД (БОУСМНРД);
4 - блок формирования управляющих сил и моментов на РД, нормально расположенные к осям связанного базиса (БФУСМРДНРОСБ);
5 - блок управления РД, нормально расположенными к осям связанного базиса (БУРДНРОСБ);
6 - блок РД, нормально расположенных к осям связанного базиса (БРДНРОСБ);
7 - корпус КА (ККА);
8 - блок датчиков угловой скорости (БДУС);
9 - блок датчиков линейных ускорений (БДЛУ);
10 - блок задания параметров управления КА (БЗПУКА).
При этом выходы БСК 1 и БДВИ 2 соединены соответственно с первым и вторым входами БОУСМНРД 3, а выход БОУСМНРД 3 соединен с первым входом БФУСМРДНРОСБ 4. Выход БФУСМРДНРОСБ 4 соединен с первым входом БУРДНРОСБ 5, а выход БУРДНРОСБ 5 соединен со входом БРДНРОСБ 6. В свою очередь БРДНРОСБ 6 соединен со вторым входом БУРДНРОСБ 5. На ККА 7 установлены БРДНРОСБ 6, БДУС 8 и ДЛУ 9. При этом выход БДУС 8 соединен с третьим входом БОУСМНРД 3, а выход БДЛУ 9 соединен с первым входом БСК 1. Первый, второй, третий и четвертый выходы БЗПУКА 10 соединены соответственно с входом БДВИ 2, вторым входом БСК 1, четвертым входом БОУСМНРД 3 и вторым входом БФУСМРДНРОСБ 4.
Указанная система составлена в соответствии с описанием, представленным для аналога [1]. Так, БСК 1 и БДВИ 2 по функциональному назначению аналогичны блоку получения сигналов управления положением КА на фиг. 2 аналога. Под управлением положением в описании аналога понимается как управление положением осей связанного базиса относительно осей опорного физического базиса (т. е. его ориентацией), так и управление положением КА в пространстве при перемещении его центра масс (т.е. его коррекцией). Для большего функционального разграничения, необходимого в последующем при описании системы, были введены два указанных блока.
БОУСМНРД 3 аналогичен блоку выработки сигналов управления для получения управляющих сил и моментов  представленному на фиг. 2 описания аналога.
представленному на фиг. 2 описания аналога.
БФУСМРДНРОСБ 4 объединил в себя по функциональному назначению нижеследующие блоки аналога: блок формирования уравнений (1 - 6), представленных в описании; блок получения функционала Z; блок линейной оптимизации или блок поиска решения для получения значений αs, максимизирующих функционал Z.
БУРДНРОСБ 5 аналогичен блоку полученных значений αs для использования в РД, представленному на фиг. 2 описания аналога.
Блоки на фиг. 2 описания аналога объединены в один блок-регулятор выработки для РД сигналов управления, представленный там же на фиг. 1а. Указанный блок имеет прямую и обратную связь с каждым из РД, входящих в БРДНРОСБ 6.
На фиг. 1а показан также блок датчиков положения осей крена, тангажа и рыскания. Под "положением" в описании понимается как угловое положение, так и линейное. Поэтому на фиг. 1 показаны БДУС 8 и БДЛУ 9 (например, 3-х осный акселерометр). Связи БДУС 8 с БОУСМНРД 3 и БДЛУ 9 с БСК 1 на фиг. 1 отображают аналогичные связи блока датчиков положения осей крена, тангажа и рыскания с блоком-регулятором выработки для ДО сигналов управления на фиг. 1а описания аналога.
БЗПУКА 10 является аналогом блока задания максимальных номинальных значений моментов и сил, представленного на фиг. 2 описания аналога. Однако, кроме указанных функций, при помощи БЗПУКА 10 можно также задавать другие параметры управления. В частности, задавать параметры, определяющие скорость коррекции, а также выбирать и управлять режимами ориентации. Указанные функциональные возможности приведены в описании аналога, где указывается, что информация об ориентации может быть получена при помощи звездного датчика, использующего в качестве ориентира полярную звезду. А информация, необходимая для задания скорости коррекции, может быть получена за счет измерения орбиты КА с помощью наземных радаров, использующих при этом доплеровский эффект для определения положения и скорости КА. Далее информация о начале режима ориентации, ее виде и скорости коррекции может быть передана в блок-регулятор выработки для ДО сигналов управления через антенну.
Работает система следующим образом.
С помощью БЗПУКА 10 выбирается требуемый режим ориентации путем включения необходимого датчика, входящего в состав БДВИ 2, и подтверждения выбора режима ориентации в БОУСМНРД 3. Одновременно в БСК 1 задаются параметры коррекции орбиты КА, включающие величину и направления вектора скорости коррекции.
Задачу построения и поддержания ориентации решает БОУСМНРД 3, который содержит в себе кинематический контур системы управления движением (подробнее описание работы кинематического контура представлено, например, при описании заявки [2] на изобретение). Для этого используется информация с БДВИ 2 и БДУС 8.
В конечном итоге, в кинематическом контуре управления формируются кинематические параметры (например, в виде кватерниона), характеризующие рассогласование между связанным базисом КА и опорным физическим. Для устранения указанного рассогласования в динамический контур управления выдаются требования на управляющие моменты Mi, где i = 1, 2, 3 - оси связанного базиса КА, в виде управляющих сигналов на выходе БОУСМ 3.
Значение вектора скорости коррекции также передается БОУСМНРД 3 с БСК 1. По величине и направлению указанного вектора БОУСМНРД 3 определяются требуемые Pi для проведения коррекции, которые также передаются в БФУСМРДНРОСБ 4. Начало выполнения режима ориентации или режима коррекции и поддержания ориентации задается командами, выдаваемыми БЗПУКА 10 в БОУСМНРД 3. Указанными командами на выход БОУСМНРД 3 пропускаются либо требования на Pi, либо на Pi и Mi.
БФУСМРДНРОСБ 4 определенным образом, описанным в способе, формирует значения αsj = τjαj, где j - номер РД, максимизирующие функционал Z. Сформированные значения передаются в БУРДНРОСБ 5, где сигналы, их описывающие, усиливаются, запоминаются и транслируются с установленной продолжительностью τj на пусковые клапаны РД. В свою очередь, с каждого РД идет в БУРДНРОСБ 5 квитанция о начале работы двигателей. Как только длительность τj работы двигателя достигает запомненной величины, он отключается (прекращается подача управляющего сигнала на пусковые клапаны).
Для поддержания заданной ориентации в процессе коррекции орбиты КА в кинематическом контуре управления используется как информация с БДВИ 2, так и БДУС 8.
Величину полученного ускорения измеряет БДЛУ 9 и передает в БСК 1, где оно интегрируется и сравнивается с величиной заложенного (расчетного) значения. При достижении кажущейся скоростью величины заложенного значения требование с БСК 1 в БОУСМНРД 3 на получение составляющих Fi вектора силы снимается. На этом режим коррекции заканчивается и осуществляется переход к заданному режиму ориентации.
БРДНРОСБ 6, входящий в состав системы, содержит 24 РД, установленных на корпус КА в форме куба. У каждой из восьми вершин сгруппированы секции по три РД с продольными осями, нормальными к осям связанного базиса. Причем места установки каждого РД равноудалены от центра масс КА.
Примечание: исходя из терминологии, принятой в ракетной технике, под секцией РД понимается группа двигателей, имеющая единую систему подачи компонентов топлива.
С теоретической точки зрения способ, система его реализующая и блок РД являются оптимальными для управления движением КА, так как они обеспечивают независимость управления по всем трем осям связанного базиса при управлении движением центра масс КА и вокруг него.
В качестве недостатка можно отметить определенную избыточность числа установленных РД. Так например, можно решать те же задачи управления при помощи 16 двигателей, расположенных в одной плоскости (см. [3], стр. 113).
Кроме того, проектно-конструкторские соображения не всегда позволяют иметь такое расположение РД. Особенно это характерно для геостационарных спутников. Так, факелы двигателей не должны засвечивать датчики системы управления движением, а струи истекающих газов не должны попадать на поверхность солнечных батарей. Работающие РД также отрицательно влияют своими выбросами и на служебную аппаратуру. Поэтому для геостационарных спутников, имеющих незначительные габариты корпуса, указанные ограничения являются определяющими при установке РД.
В качестве примера иного расположения РД на корпусе КА может служить "Комбинированная система управления с химическими и электрическими двигателями для геостационарных спутников" (см. [4]). Задача защиты служебной и специальной аппаратуры в указанном КА решается путем установки специальных защитных раструбов (см. рис. 4, на стр. 87). А для отклонения реактивной струи от рабочей поверхности поворотных солнечных батарей электрические реактивные двигатели установлены под углом относительно осей связанного базиса. Причем линии действия их тяг не проходят через центр масс.
Способ управления КА с РД с направленными под углом к осям связанного базиса КА и смещенными относительно центра масс линиями действия сил тяг, описанный в [4], а также система управления движением КА и блок РД, реализующие указанный способ, принимаются в качестве прототипов.
На фиг. 2 представлена схема расположения части РД системы, описанной в [4].
Четыре РД с номерами  соответствующие позициям 11 - 14, установлены на корпусе КА 7 в плоскости YOZ связанного базиса OXYZ. Каждый из РД расположен под углом
соответствующие позициям 11 - 14, установлены на корпусе КА 7 в плоскости YOZ связанного базиса OXYZ. Каждый из РД расположен под углом  по отношению к оси OY. Кроме этого на фиг. 2 введены обозначения:
по отношению к оси OY. Кроме этого на фиг. 2 введены обозначения: радиусы-векторы установки
радиусы-векторы установки 
 векторы сил тяги
векторы сил тяги 
l - расстояние между линиями действия векторов сил тяги РД.
Пунктиром также обозначены места расположения солнечных батарей.
Аналогичным образом можно разместить и секции РД, например, по два двигателя в каждой. Тогда  представляют равнодействующие от действия сил тяги двигателей, входящих в каждую секцию.
представляют равнодействующие от действия сил тяги двигателей, входящих в каждую секцию.
Как видно из фиг. 2, векторы сил тяги РД не проходят через центр масс. Это дает возможность использовать указанные РД для управления движением вокруг центра масс КА парами сил от  Момент каждой пары
Момент каждой пары  при равенстве сил тяг
при равенстве сил тяг  каждого РД равен
каждого РД равен  и направлен по оси OX в ту сторону, с которой вращение пары представляется происходящим против хода часовой стрелки, т.е. имеем
и направлен по оси OX в ту сторону, с которой вращение пары представляется происходящим против хода часовой стрелки, т.е. имеем 
С помощью указанных РД можно проводить также поочередно коррекцию орбиты КА в направлении осей OY и OZ связанного базиса. При соответствующей ориентации указанные оси КА могут совпадать с направлением, перпендикулярным плоскости орбиты (направление север-юг), и с направлением вектора скорости КА (направление восток-запад). Обычно для отработки заданных направлений коррекции задаются векторы линейной скорости 
На фиг. 2 показан пример выдачи корректирующего импульса в направлении оси OZ. При этом проекции векторов  суммируются в данном направлении, а
суммируются в данном направлении, а  взаимно компенсируют друг друга. Потеря силы тяги в заданном направлении пропорциональна cosα. Следовательно, чем меньше угол α, тем больше потери и наоборот. Нетрудно убедиться, что номинальные возмущающие моменты, вызванные смещением векторов тяги относительно центр масс, также взаимно друг друга компенсируют:
взаимно компенсируют друг друга. Потеря силы тяги в заданном направлении пропорциональна cosα. Следовательно, чем меньше угол α, тем больше потери и наоборот. Нетрудно убедиться, что номинальные возмущающие моменты, вызванные смещением векторов тяги относительно центр масс, также взаимно друг друга компенсируют:
Таким образом, способ-прототип управления реактивными двигателями с линиями действия сил тяги, не проходящими через центр масс КА, включает в себя приложение к корпусу КА требуемого управляющего момента относительно оси связанного базиса от РД со взаимной компенсацией векторов тяг, коррекцию орбиты КА по одному из заданных направлений, совпадающих с направлением осей связанного базиса, с приложением сил тяги РД для отработки импульсов, заданных в соответствии с направлениями и величиной векторов линейной скорости 
Недостатки способа-прототипа заключаются в следующем.
При управлении вокруг центра масс можно создать лишь управляющие воздействия относительно одной оси. Тем самым необходимо реактивную систему дополнять другими РД для управления по другим осям управления.
При коррекции орбиты происходит потеря суммарного располагаемого импульса тяги, пропорциональная cosα. Так, для описанной реализации способа-прототипа минимальное значение указанной потери составило 14% (см. [4], стр. 85).
Для управления КА по всем трем осям с использованием действий, характерных для способа-прототипа, применяется комбинированная система управления движением. При этом два независимых блока РД реализуют управляющие воздействия на корпус КА.
Блок-схема указанной системы показана на фиг. 3, где введены следующие новые обозначения:
15 - блок формирования управляющих сил и моментов на РД с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг (БФУСМРДЛДСТРУ);
16 - блок управления РД с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг (БОЗПИРДЛДСТРУ);
17 - блок РД коррекции и управления относительно центра масс с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг (БРДКУОЦМЛДСТРУ).
При этом второй выход БОУСМНРД 3 соединен с первым входом БФУСМРДЛДСТРУ 15, второй вход которого, в свою очередь, соединен с четвертым выходом БЗПУКА 10. Выход БФУСМРДЛДСТРУ 15 соединен с первым входом БУРДЛДСТРУ 16, выход которого соединен с входом БРДКУОЦМЛДСТРУ 17. А выход БРДКУОЦМЛДСТРУ 17 соединен со вторым входом БКРДЛДСТРУ 16.
Остальные блоки и их функциональные связи соответствуют системе аналога.
В соответствии с описанием прототипа к первой группе блоков и датчиков системы-прототипа (см. [4] , стр. 87) можно отнести БДВИ 2, БЗПУКА 10. При этом в качестве датчиков внешней информации используются инфракрасные датчики для режимов номинальной фазы и передачи вращения, датчики Солнца и др.
Ко второй группе - БСК 1, БДУС 8 и БДЛУ 9, а к третий группе - остальные блоки системы управления, показанной на фиг. 3.
Функциональные связи блоков соответствуют, как и в системе-аналоге, замкнутым контурам управления КА как вокруг центра масс, так и непосредственно его перемещением.
Различие же состоит в том, что вновь введенный БРДКУОЦМЛДСТРУ 17, снабженный электрическими РД (ЭРД), имеет при управлении заведомо более высокий приоритет по сравнению с БРДНРОСБ 6, снабженным химическими РД (ХРД).
Следовательно, при определении в БОУСМНРД 3 управляющих сил, связанных с коррекцией орбиты в направлении ±OY и ±OZ, а также определении управляющего момента  управление с БОУСМНРД 3 безусловно передается в БФУСМРДЛДСТРУ 15. В указанном блоке происходит логический выбор, например, из состава, указанного на фиг. 2, двигателей для реализации режима по требованию.
управление с БОУСМНРД 3 безусловно передается в БФУСМРДЛДСТРУ 15. В указанном блоке происходит логический выбор, например, из состава, указанного на фиг. 2, двигателей для реализации режима по требованию.
В свою очередь, БФУСМРДЛДСТРУ 15 содержит в себе три блока (см. фиг. 4):
18 - блок формирования управляющих моментов относительно оси связанного базиса, не совпадающей с направлениями коррекции (БФУМООСБНСНК);
19 - блок формирования управляющих сил в направлении первой оси коррекции связанного базиса (БФУСНПОКСБ);
20 - блок формирования управляющих сил в направлении второй оси коррекции связанного базиса (БФУСНВОКСБ).
При этом первые входы указанных блоков соединены со вторым выходом БОУСМНРД 3, а вторые входы, являющиеся одновременно вторым входом БФУСМРДЛДСТРУ 15, соединены с четвертым выходом БЗПУКА 10. Выходы БФУМООСБНСНК 18, БФУСНПОКСБ 19 и БФУСНВОКСБ 20 соединены с выходом БФУСМРДЛДСТРУ 15.
БФУСМРДЛДСТРУ 15 может быть реализован с использованием микропроцессорной техники, например, на базе одного из процессоров трехканального исполнения ЦВМ "Электроника" МС1201.02-02 (см. [5]) с дополнительными контроллерами ввода-вывода.
На фиг. 5 показан пример такой реализации, при этом введены новые обозначения:
21 - тактовый генератор (ТН);
22 - процессор (П);
23 - дешифратор адреса (ДША);
24 - устройство ввода-вывода (УВВ);
ШД(16)* - трехстабильная двухнаправленная 16-ти разрядная шина данных;
ША(16)* - трехстабильная однонаправленная 16-ти разрядная шина адреса;
ШУ(10) - шина управления (10 линий сигналов управления).
Блоки 18 - 20 набраны из стандартных ПЗУ емкостью 1 кБайт (см. [6], стр. 115 -117).
Через УВВ 24 осуществляется многоканальная функциональная связь второго выхода БОУСМ 3 с первыми входами блоков 18 - 20 (см. фиг. 4), а также пятого выхода БЗПУКА 10 со вторыми входами блоков 18 - 20.
При этом реализация связи УВВ 24 и БЗПУКА 10 может быть осуществлена при помощи аппаратуры управляющего информационно-вычислительного комплекса (УИВК) "СТЕК-30", подробное описание которой представлено в [2] на стр. 31 - 33.
Работает БФУСМРДЛДСТРУ 15 следующим образом. При помощи УИВК через УВВ 24 в адреса ячеек ПЗУ блоков 18 - 20 заносится информация о номерах РД, обеспечивающих тот или иной динамический процесс. Так, в БФУСМРДЛДСТРУ 15 непосредственно из БФУМООСБНСНК 18 заносится информация для формирования управляющего момента  Аналогично, в БФУСНПОКСБ 19 заносится информация для коррекции орбиты относительно первой оси
Аналогично, в БФУСНПОКСБ 19 заносится информация для коррекции орбиты относительно первой оси  А в БФУСНВОКСБ 20 - относительно второй оси
А в БФУСНВОКСБ 20 - относительно второй оси 
По запросу с второго выхода БОУСМ 3, через УВВ 24 и ДША 23 производится адресное обращение к соответствующему ПЗУ, на базе которого реализован один из блоков 18 - 20. При этом, например, одним из 16-ти разрядов управляющего слова определяется знак управляющего воздействия, а другими - считывается информация о номерах РД. Сформированная информация через УВВ 24 передается в БОЗПИРДЛДСТРУ 16. В указанном блоке, пройдя цифроаналоговый преобразователь и усилитель, она достигает обмотки соответствующего командного реле на включение РД. После срабатывания реле проходит команда на включение двигателя в БРДКУОЦМЛДСТРУ 17. При этом в БОЗПИРДЛДСТРУ 16 возвращается "квитанция", подтверждающая срабатывание двигателя (например, от сигнализатора давления в камере сгорания). Если "квитанция" не получена, БОЗПИРДЛДСТРУ 16 дублирует выдачу включающей команды и т.д. до 3-х раз.
Выключение РД производится по снятию запроса на управление из БОУСМНРД 3 в соответствующий началу управления блок, входящий в состав БФУСМРДЛДСТРУ 15.
Поскольку блок РД, указанный на фиг. 2, не может справиться полностью с задачами управления, его дополняют вторым блоком еще с 14 двигателями. Действия сил тяги указанных 14 двигателей нормальны к соответствующим плечам. При этом сохраняется независимость управления вокруг центра масс КА по всем трем осям. Управление вторым блоком РД может проводиться в соответствии со способом-аналогом и системой-аналогом, его реализующей.
Таким образом, КА содержит всего 18 двигателей, то есть на 6 меньше, чем у аналога.
Для КА определенного класса - геостационарных спутников - в [4] проведен подробный анализ стоимости канала связи в зависимости от массы спутника при одинаковом сроке службы 10 лет. При этом показано, что при установке на спутнике реактивной системы, содержащей один блок РД, работающий по принципу аналога на однокомпонентном топливе, масса спутника составит 1000 кг; то же, но на двухкомпонентном топливе - 920 кг. А с гибридной реактивной системой прототипа, где 14 химических двигателей на двухкомпонентном топливе и 4 (установленные по схеме на фиг. 2) являются электрореактивными, масса спутника составит 770 кг.
Соответственно, годовая стоимость канала связи в миллионах расчетных единиц составила 6,8; 6,0; 4,6.
Уменьшение массы спутника при установленной массе полезной нагрузки и прочих равных условиях достигается прежде всего за счет увеличения удельного импульса РД. Это, в свою очередь, требует меньших запасов рабочего тела на весь срок эксплуатации. Известно, что наибольшим удельным импульсом из перечисленных обладают ЭРД. Однако они имеют и наименьшую тягу. Поэтому, если для двигателей, работающих на химическом топливе, потребное время в импульсах тяги составляет единицы и десятки секунд, то для ЭРД оно может составлять сотни и тысячи секунд. Естественно, что в первом случае легче принудительно защититься от вредного воздействия факелов двигателей и истекающих газов на работающую датчиковую аппаратуру, если они попадают в ее рабочую зону. Например, можно просто ограничить участки связи с Землей на время коррекции спутника.
Во втором случае это сделать практически невозможно, так как ЭРД работают почти непрерывно.
Опытно-конструкторские проработки показывают, что замену на корпусе КА химических двигателей на ЭРД можно произвести, установив последние под углами к осям связанного базиса КА. Только тогда удается учесть ограничения на установку двигателей, которые задают датчики служебной аппаратуры, приборы и аппаратура полезной нагрузки, элементы конструкции КА (в частности солнечные батареи).
Естественно, что замена химических РД на ЭРД приведет либо к уменьшению общей массы спутника, либо, при его заданной массе, к увеличению массы полезной нагрузки. То и другое является положительным техническим результатом.
Технический результат, на который направлены предлагаемые изобретения, заключается в разработке способа управления КА с реактивной системой, содержащей блок РД, использующий только двигатели, расположенные под углами к осям связанного базиса. При этом обеспечивается независимость управления КА относительно центра масс при его перемещении в заданных четырех направлениях коррекции. Разработанный блок РД, входящий в систему, реализующую способ, также имеет минимальное число установленных на КА двигателей.
Указанный технический результат достигается тем, что в способе управления КА, снабженным реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия сил тяг, включающем приложение к корпусу КА требуемого управляющего момента относительно оси связанного базиса от реактивных двигателей со взаимной компенсацией векторов тяг, коррекцию орбиты КА по одному из двух заданных направлений, совпадающих с направлением осей связанного базиса с приложением сил тяг реактивных двигателей для отработки импульсов, заданных в соответствии с направлениями и величиной векторов линейной скорости КА  приложение управляющих моментов к корпусу КА для управления вокруг центра масс осуществляют одновременно по трем осям связанного базиса путем включения тех реактивных двигателей, установленных в параллельных плоскостях, проекции векторов управляющих моментов которых на ось связанного базиса в направлении требуемого управляющего момента суммируются и взаимно компенсируются относительно остальных осей указанного базиса, коррекцию орбиты центра масс КА производят путем приложения векторов тяг от реактивных двигателей, установленных в указанных параллельных плоскостях, проекции векторов тяг которых одновременно совпадают с направлением векторов
приложение управляющих моментов к корпусу КА для управления вокруг центра масс осуществляют одновременно по трем осям связанного базиса путем включения тех реактивных двигателей, установленных в параллельных плоскостях, проекции векторов управляющих моментов которых на ось связанного базиса в направлении требуемого управляющего момента суммируются и взаимно компенсируются относительно остальных осей указанного базиса, коррекцию орбиты центра масс КА производят путем приложения векторов тяг от реактивных двигателей, установленных в указанных параллельных плоскостях, проекции векторов тяг которых одновременно совпадают с направлением векторов  а возмущающие моменты вдоль осей связанного базиса, совпадающих с направлениями коррекции, взаимно компенсируются, при этом для компенсации возмущающих моментов относительно третьей оси связанного базиса прикладывают управляющие моменты от реактивных двигателей, расположенных в тех же плоскостях, проекции векторов моментов которых относительно первой и второй оси связанного базиса и проекции их сил тяг на указанные оси взаимно компенсируются, а проекции векторов управляющих моментов относительно третьей оси направлены противоположно возмущающим, при этом коррекцию орбиты продолжают до начала выполнения условий
а возмущающие моменты вдоль осей связанного базиса, совпадающих с направлениями коррекции, взаимно компенсируются, при этом для компенсации возмущающих моментов относительно третьей оси связанного базиса прикладывают управляющие моменты от реактивных двигателей, расположенных в тех же плоскостях, проекции векторов моментов которых относительно первой и второй оси связанного базиса и проекции их сил тяг на указанные оси взаимно компенсируются, а проекции векторов управляющих моментов относительно третьей оси направлены противоположно возмущающим, при этом коррекцию орбиты продолжают до начала выполнения условий

где
ΔV1K, ΔV2K - величины кажущейся скорости КА в заданных направлениях его коррекции,
после чего определяют вектор превышения скорости коррекции и компенсируют его путем приложения направленных противоположно вектору превышенной скорости векторов тяг реактивных двигателей, установленных в указанных параллельных плоскостях, при этом взаимно компенсируют проекции векторов тяг на другую ось коррекции, а также взаимно компенсируют возмущающие моменты относительно трех осей связанного базиса, приложение векторов тяги прекращают по достижению кажущейся скоростью КА превышенной величины.
В системе управления движением КА, снабженным РД с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг, включающей блок скорости коррекции, блок датчиков внешней информации для опорного базиса, блок определения управляющих сил и моментов на реактивные двигатели, блок формирования управляющих сил и моментов на реактивные двигатели с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг, блок управления реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг, блок реактивных двигателей коррекции и управления относительно центра масс с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг, блок датчиков угловой скорости, блок датчиков линейных ускорений, блок задания параметров управления КА, при этом выходы блоков скорости коррекции и датчиков внешней информации для опорного базиса соединены соответственно с первым и вторым входом блока определения управляющих сил и моментов на реактивные двигатели, а выход блока определения управляющих сил и моментов на реактивные двигатели соединен с первым входом блока формирования управляющих сил и моментов на реактивные двигатели с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяги, выход которого, в свою очередь, соединен с первым входом блока управления реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг, а второй вход указанного блока соединен с выходом блока реактивных двигателей коррекции и управления относительно центра масс с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг, выход блока управления реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг, соединен с входом блока реактивных двигателей коррекции и управления относительно центра масс с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг, выход блока датчиков угловой скорости соединен с третьим входом блока определения управляющих сил и моментов на реактивные двигатели, а выход блока датчиков линейных ускорений соединен с первым входом блока скорости коррекции, первый, второй, третий и четвертый выходы блока задания параметров управления КА соединены соответственно с входом блока датчиков внешней информации для опорного базиса, вторым входом блока скорости коррекции, четвертым входом блока определения управляющих сил и моментов на реактивные двигатели и вторым входом блока формирования управляющих сил и моментов на реактивные двигатели с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг, при этом блок формирования управляющих сил и моментов на реактивные двигатели с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг включает в себя:
блок формирования управляющих моментов относительно оси связанного базиса, не совпадающей с направлениями коррекции, блок формирования управляющих сил в направлении первой оси коррекции связанного базиса, блок формирования управляющих сил в направлении второй оси коррекции связанного базиса, при этом первые входы указанных блоков формирования соединены с выходом блока определения управляющих сил и моментов на реактивные двигатели, а вторые входы соединены с четвертым выходом блока задания параметров управления КА, а выходы указанных блоков соединены с первым входом блока управления реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг, дополнительно включен блок определения вектора превышения скорости коррекции, при этом второй выход блока задания параметров управления КА соединен с первым входом указанного блока, а выход блока скорости коррекции - со вторым его входом, выход блока определения вектора превышения скорости коррекции соединен с первым входом блока определения управляющих сил и моментов на реактивные двигатели, кроме того, блок реактивных двигателей коррекции и управления относительно центра масс с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг выполнен в виде двухосной схемы управления коррекцией и трехосной схемы управления ориентацией, при этом блок формирования управляющих сил и моментов на РД с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг дополнительно содержит: блок формирования управляющих сил относительно двух осей коррекции, блок формирования управляющих моментов относительно первой оси связанного базиса, совпадающей с направлением коррекции, блок формирования управляющих моментов относительно второй оси связанного базиса, совпадающей с направлением коррекции, при этом первые входы указанных блоков формирования соединены с выходом блока определения управляющих сил и моментов на реактивные двигатели и вторые входы соединены с четвертым выходом блока задания параметров управления КА, а выходы указанных блоков соединены с первым входом блока управления реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг.
В блоке реактивных двигателей коррекции и управления относительно центра масс с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг, включающем четыре равнотяговых секций реактивных двигателей с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата продольными осями, установленных на корпусе КА параллельно базовой плоскости, образованной осями связанного базиса, дополнительно введены четыре равнотяговые секции реактивных двигателей, имеющие аналогичную вышеуказанной установку в одной плоскости, при этом обе плоскости установки равноудалены от базовой плоскости и параллельны ей, а проекции векторов управляющих сил /Pi/ и моментов /Mi/ от каждой секции двигателей на оси базиса, где i = 1, 2, 3 - номера указанных осей, имеют вид: для секции 1 - (O, P2, P3),(-M1, -M2, M3); для секции 2 - (O, P2, P3), (-M1, M2, -M3); для секции 3 - (O, -P2, P3), (M1, -M2, -M3); для секции 4 - (O, -P2, P3), (M1, M2, M3); для секции 5 - (O, -P2, -P3), (-M1, M2, -M3); для секции 6 - (O, -P2, -P3), (-M1, -M2, M3); для секции 7 - (O, P2, -P3), (M1, M2, M3); для секции 8 - (O, P2, -P3), (M1, -M2, -M3).
Сущность предлагаемых технических решений объясняется фиг. 1 - 12, где представлены:
на фиг. 1 - блок-схема системы-аналога;
на фиг. 2 - схема, объясняющая логику работы способа-прототипа;
на фиг. 3 - 5 - блок-схема системы-прототипа с примером реализации;
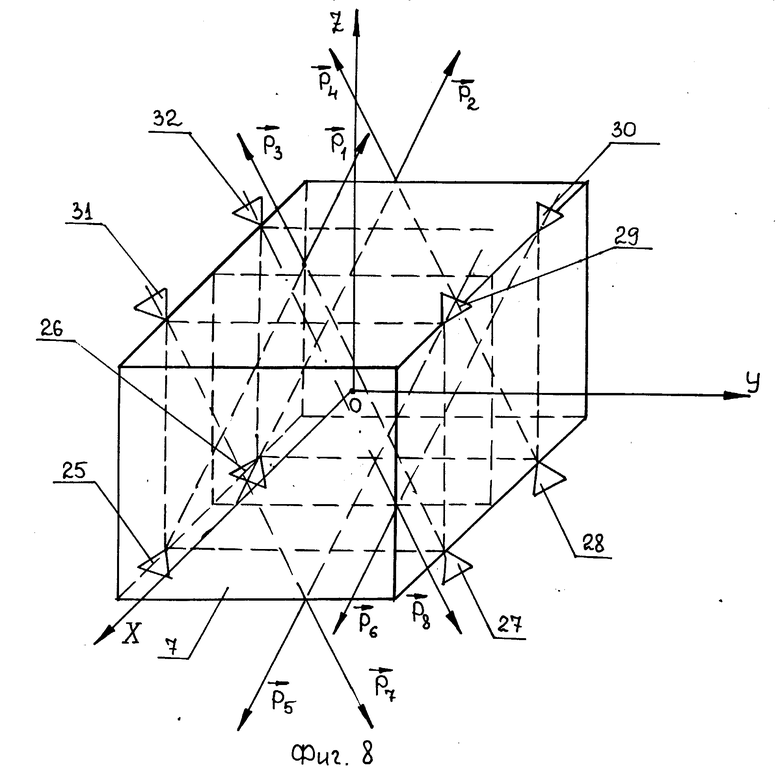
на фиг. 6 - 8 - схемы, объясняющие логику работы предлагаемого способа;
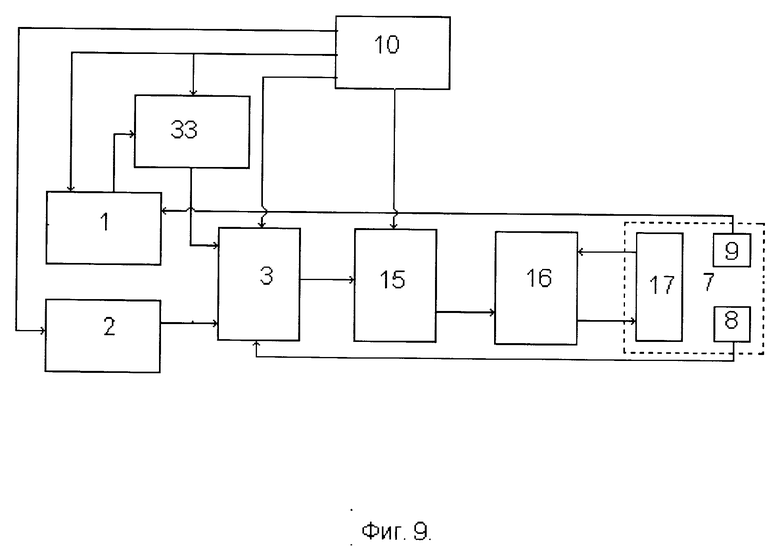
на фиг. 9 - 11 - блок-схемы предлагаемой системы с примером реализации;
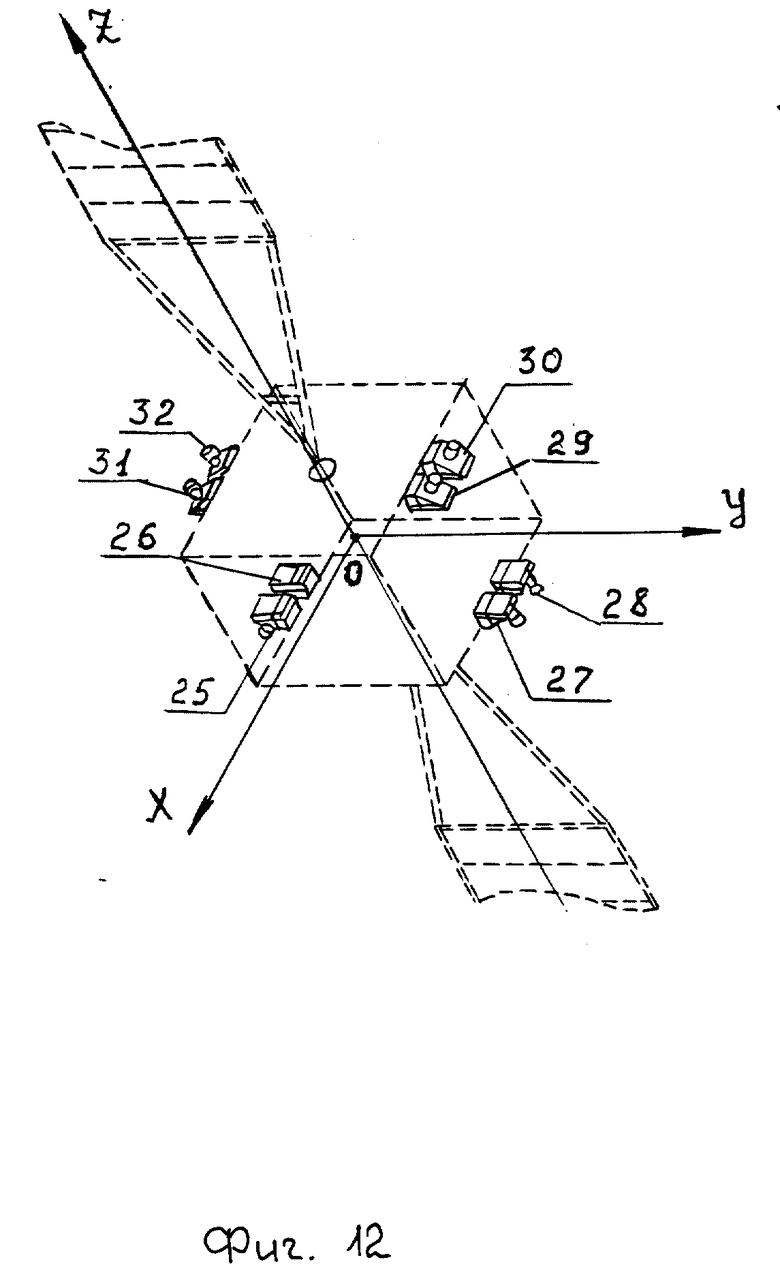
на фиг. 12 - схема размещения блока РД на корпусе КА.
Рассмотрим сущность предлагаемого способа управления, при этом приоритет отдадим управлению перемещением центра масс как более продолжительному режиму по сравнению с управлением движением вокруг центра масс.
Поскольку коррекция орбиты производится сразу в двух направлениях, то расположим РД1 и РД2 на КА таким образом (см. поз. 25, 26 на фиг. 6, 7), чтобы проекции их векторов тяг были направлены по двум осям связанного базиса OY и OZ. Как видно из указанных фигур, каждый из двигателей расположен в отдельной плоскости, параллельной плоскости, образованной осями связанного базиса OY и OZ.
При этом проекции векторов тяги  параллельны между собой и однонаправлены. А величина каждой из проекций зависит от угла установки α. Таким образом, если совместить в процессе ориентации КА оси связанного базиса OY и OZ с заданными направлениями коррекции, то можно проводить коррекцию орбиты сразу в двух направлениях.
параллельны между собой и однонаправлены. А величина каждой из проекций зависит от угла установки α. Таким образом, если совместить в процессе ориентации КА оси связанного базиса OY и OZ с заданными направлениями коррекции, то можно проводить коррекцию орбиты сразу в двух направлениях.
По известным значениям векторов линейной скорости  можно определить угол установки РД α, как
можно определить угол установки РД α, как
Если соблюсти указанный угол удается, то потерь в располагаемом суммарном импульсе тяги от двух РД нет.
Управление движением вокруг центра масс в процессе коррекции должно быть квазинезависимым от номинальных управляющих моментов, вызванных установкой двигателей, т.е. указанные моменты должны взаимно компенсироваться. При соблюдении указанных выше условий коррекции взаимно скомпенсировать все три составляющие номинальных управляющих векторов моментов, создаваемых каждым РД, физически невозможно.
Наиболее оптимальной будет установка РД в том случае, когда плоскости, где они размещены, равноудалены от центра масс O. На фиг. 6, 7 радиус-векторы  мест крепления РД1 и РД2 соответственно определяют такую установку. Тогда номинальный суммарный управляющий момент
мест крепления РД1 и РД2 соответственно определяют такую установку. Тогда номинальный суммарный управляющий момент  от установки РД будет равен:
от установки РД будет равен: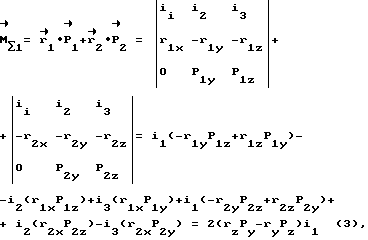
так как
Для компенсации составляющей Mx = 2(rZPY - rYPZ) необходима пара РД, тогда их включение не повлияет на величину корректирующих импульсов.
В отличие от аналога и прототипа такую пару предлагается создать также при помощи РД, установленных под углами к продольным осям КА. Указанная пара должна создавать противоположный момент, а по остальным осям управляющие моменты должны взаимно компенсироваться. Кроме того, двигатели указанной пары, при необходимости, должны участвовать в коррекции орбиты по другим направлениям.
Укажем четыре возможных направления одновременной коррекции орбиты КА по двум осям без его переориентации:
1) +OY, +OZ; 2) -OY +OZ; 3) -OY, -OZ; 4) +OY, -OZ.
Для реализации указанной коррекции разместим еще 6 двигателей от РД3 до РД8 (см. поз. 27 - 32 на фиг. 8) в выбранных ранее плоскостях. При этом установим их также под углом α относительно осей, параллельных OZ. Обозначим на фиг. 8 через  вектор тяги соответствующих РД. Тогда для второго случая коррекции орбиты с использованием РД3 и РД4 при прочих равных условиях получим:
вектор тяги соответствующих РД. Тогда для второго случая коррекции орбиты с использованием РД3 и РД4 при прочих равных условиях получим: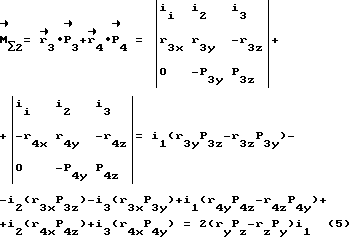
Аналогично получим  при использовании РД5, РД6 и РД7, РД8;
при использовании РД5, РД6 и РД7, РД8;
Таким образом, при коррекции орбиты в любом из заданных направлений мы получим один из управляющих моментов +Mx или -Mx.
Парировать возмущения от -Mx, например, полученные при работе РД1 и РД2, могут пары двигателей РД3 + РД7 или РД4 + РД8. При этом относительно других двух осей (OY и OZ) номинальные возмущающие моменты взаимно компенсируются:
Как видно из (3) и (7), моменты  противоположно направлены.
противоположно направлены.
При коррекции орбиты по второму направлению при помощи РД3 и РД4 возмущение парируется парой РД1 + РД5 или РД2 + РД6.
При коррекции орбиты по третьему направлению при помощи РД5 и РД6 возмущение парируется парой РД4 + РД8 или РД3 + РД7.
При коррекции орбиты по четвертому направлению при помощи РД7 и РД8, возмущения парируются парой РД1 + РД5 или РД2 + РД6.
Как видно из вышеприведенного анализа, предложенный способ управления решает задачу квазинезависимого управления от номинальных возмущающих моментов при коррекции орбиты в четырех направлениях.
Однако для коррекции не всегда можно соблюсти требуемое соотношение векторов линейной скорости, установив РД под углом α (см. (2)).
Например, в [3] полные приращения линейной скорости за время всего полета КА составляют ΔV1 = 230 м/c, ΔV2 = 70 м/c.
Угол α = arc tg (70/230) ≈ 17o. А реально установленные РД имеют угол α′ = 30o.
Следовательно, в процессе коррекции орбиты каждое из значений ΔV1, ΔV2 может задаваться произвольным вплоть до того, что одно из них может равняться нулю.
Указанные особенности необходимо учитывать при управлении КА и отрабатывать импульсы силы строго заданной величины и направления.
Исходя из вышеизложенного, окончательную отработку импульсов предлагается проводить следующим образом. После включения двигателей по одному из указанных выше четырех направлений, определяемых векторами скорости, измеряем величины кажущейся скорости ΔV1к и ΔV2к. А выключение РД производим по началу выполнения условий:
При выполнении обоих условий (8) одно равенство будет выполняться, а другое неравенство будет характеризовать переработку импульса силы тяги по величине кажущейся скорости.
Например, пусть произошла переработка импульса в направлении оси OZ на величину ΔVz:
Следовательно, необходимо отработать импульс тяги для получения кажущейся скорости ΔVzк. Для этого предлагается включить одновременно РД5, РД7 и РД6, РД8. Как видно из фиг. 8, проекции векторов сил тяги на ось OY от каждого РД (P'y) взаимно компенсируются, а в направлении оси -OZ(P'z) - суммируются
От РД5 и РД7 номинальный возмущающий момент  где M'y - возмущающий момент от одного из РД, участвующего в коррекции. А от РД6 и РД8
где M'y - возмущающий момент от одного из РД, участвующего в коррекции. А от РД6 и РД8 
В процессе коррекции  взаимно компенсируют друг друга.
взаимно компенсируют друг друга.
Аналогично при коррекции орбиты в других направлениях:
ΔVzк ⇒ PД1, PД3 и РД2, РД4;
ΔVyк ⇒ PД1, PД7 и РД2, РД8;
-ΔVyк ⇒ PД3, PД5 и РД4, РД6;
По достижении кажущейся скоростью одного из полученных значений Vzk, -Vzk, Vyk, -Vyk все двигатели, участвующие в коррекции, выключаются.
Из вышеизложенного следует, что предложенный способ сохраняет возможность квазинезависимого управления перемещением центра масс КА, в том числе и при коррекции орбиты только в одном направлении
Для управления движением вокруг центра масс предлагается включать одновременно четыре РД. При этом выбирается следующее сочетание двигателей:
+Mx ⇒ РД3, РД4 и РД7, РД8;

-Mx ⇒ РД1, РД2 и РД5, РД6;
+My ⇒ РД2, РД4 и РД5, РД7;
-My ⇒ РД1, РД3 и РД6, РД8;

+Mz ⇒ РД4, РД6 и РД1, РД7;

-Mz ⇒ РД3, РД5 и РД2, РД8;

Таким образом сохраняется квазинезависимость управления КА вокруг центра масс.
Следовательно, для управления вокруг центра масс КА выбираем РД таким образом, что проекции их векторов тяг на оси связанного базиса взаимно компенсируют друг друга, а в качестве требуемого управляющего момента (± Mx, ± My и ± Mz) используется номинальный возмущающий момент. При этом номинальные возмущающие моменты относительно осей связанного базиса КА, по которым не проводится управление, взаимно компенсируются.
Если в процессе управления КА вокруг центра масс возникают дополнительные нерасчетные возмущения от действия внешних возмущающих моментов, моментов, связанных с конструктивными погрешностями в установке РД и т.д., то они могут устраняться, например, за счет импульсного регулирования работы двигателей (подробно см. в [1]). Указанные погрешности могут также устраняться системой силовых гироскопов, моментными магнитными приводами и т.д.
Главное же то, что предложенный способ позволяет проводить квазинезависимое управление по всем трем осям как при управлении перемещением центра масс, так и вокруг него.
Независимость управления рассмотрена для минимального числа векторов сил тяги (всего восьми), расположенных в пространстве правой ортогональной тройки векторов, определяющей связанный базис КА.
В принципе, возможно увеличение числа векторов управляющих сил для решения тех же задач. Например, симметричное расположение указанных векторов в параллельных плоскостях, равноудаленных от базовой плоскости (в рассмотренном случае плоскости OYZ).
Преимущество рассмотренного случая в том, что он предполагает минимально необходимое количество векторов управляющих сил для решения поставленной задачи: сохранения квазинезависимого управления по трем осям связанного базиса КА как при управлении центром масс, так и вокруг него при одновременном обеспечении четырех заданных направлений коррекции орбиты КА.
Для реализации предложенного способа управления предлагается от комбинированной системы управления движением КА прототипа перейти к одноблочной системе, использующей только РД с векторами тяг, расположенными под углом к осям связанного базиса и смещенными относительно центра масс.
Блок-схема такой системы показана на фиг. 9. Как видно из указанной фигуры, из системы исключены блоки БФУСМРДНРОСБ 4, БУРДНРОСБ 5, БРДНРОСБ 6 и их функциональные связи. Дополнительно введен блок определения вектора превышения скорости коррекции (БОВПСК) 33. При этом второй выход БЗПУКА 10 соединен с первым входом БОВПСК 33, а выход БСК 1 - со вторым входом указанного блока. Выход БОВПСК 33 соединен с первым входом БОУСМНРД 3. А БРДКУОЦМЛДСТРУ 17 выполнен в виде 2-х осной схемы управления коррекцией и 3-х осной схемы управления ориентацией. Поэтому в БФУСМРДЛДСТРУ 15 дополнительно включены (см. фиг. 10):
34 - блок формирования управляющих сил относительно двух осей коррекции (БФУСОДОК);
35 - блок формирования управляющих моментов относительно первой оси связанного базиса, совпадающей с направлением коррекции (БФУМОПОСБСНК);
36 - блок формирования управляющих моментов относительно второй оси связанного базиса, совпадающей с направлением коррекции (БФУМОВОСБСНК).
При этом первые входы указанных блоков соединены со вторым выходом БОУСМНРД 3, а вторые входы, являющиеся одновременно вторым входом БФУСМРДЛДСТРУ 15, соединены с четвертым выходом БЗПУКА 10. А выходы указанных блоков соединены с первым входом БУРДЛДСТРУ 16.
БОВПСК 33, а также БФУСОДОК 34, БФУМОПОСБСНК 35, БФУМОПОСБСНК 36 могут быть реализованы на базе указанного ранее микропроцессора (см.[5]).
На фиг. 11 показан пример такой реализации с учетом ранее введенных на фиг. 5 обозначений. Блоки 33 - 36 набраны на стандартных ПЗУ емкостью 2 кБайт, см. [6]), стр. 115 - 117.
Через УВВ 24 осуществляется многоканальная функциональная связь первого выхода БСК1 со вторым входом БОВПСК 33, а также выхода БОВПСК 33 с первым входом БОУСМНРД 3.
ДША 23 позволяет также через ШД(16)*, ША(16)*, ШУ(10)* использовать блоки 34 - 36 для управления по адресному обращению к соответствующим ПЗУ.
Связь БЗПУКА 10 с блоками 33 - 36 осуществляется через УИВК "СТЕК-30" (подробное описание см. в [2] на стр. 31 - 33).
Работает система следующим образом.
При помощи УИВК через УВВ 24 в адреса ячеек ПЗУ блоков 18 - 20, 34 - 36 записывается информация о номерах РД, обеспечивающих соответствующий динамический процесс.
Причем в блоках 18 - 20 системы-прототипа и представленной системы информация разная.
Так, например, в соответствии с номерами РД рассмотренного способа в БФУМООСБНСНК 18 записываются два кодовых слова, кодирующие выражения (13) и (14). Для 16-ти разрядных шин данные слова кодируются в виде (для +Mx):
или в восьмеричном виде:
014600.
А для - Mx:
1 110 011 000 000 000, или в восьмеричном виде: 163000.
В БФУМОПОСБСНК 35 записывается аналогично информация об РД для получения ± My, согласно выражениям (15) и (16), а в БФУМОПОСБСНК 36 - об РД для получения ± Mz, согласно выражениям (17) и (18).
В БФУСНПОКСБ 19 записывается информация для получения ± Δ Vук (см. (11), (12)), а в БФУСНВОКСБ 20 - для получения ±ΔVzк(см.(10)).
В БФУСОДОК 34 записываются четыре управляющих слова, соответствующие вышеуказанным четырем возможным направлениям одновременной коррекции с указанием также номеров РД для парирования возникающих возмущающих моментов.
Например, для первого направления коррекции (+OY, +OZ), в котором участвуют РД1, РД2 и парируют возмущения РД3 - РД7:
OY - OZ
или в восьмеричном виде: 070400.
Аналогично заносится информация об остальных направлениях коррекции.
Примечание: как видно из приведенных примеров, кодирование знака управляющего воздействия носит только информационный смысл для оператора, обслуживающего систему. Выбором же номеров РД обеспечивается требуемый вид управляющего воздействия, в том числе и его знак.
В БОВПСК 33 заносится в восьмеричном виде значение проекций ΔV1, ΔV2 вектора скорости коррекции  Обозначение компонент вектора приведено в соответствии с фиг. 7, где ΔV1 и ΔV2 модули соответствующих векторов
Обозначение компонент вектора приведено в соответствии с фиг. 7, где ΔV1 и ΔV2 модули соответствующих векторов 
Как и в прототипе, отработка заданной скорости фиксируется в БСК 1, получающего информацию с БДЛУ 9. После того как по одному из каналов управления выполнится одно из условий неравенств (8), информация об этом передается в БОВПСК 33, однако, далее она не транслируется в БОУСМНРД 3, а продолжается фиксация величины кажущейся скорости ΔV1к и ΔV2к. Как только приходит из БСК 1 второй сигнал о выполнении второго неравенства, входящего в (8), в БОВПСК 33 производится определение
Далее производится присвоение:
U1: = -sign V1 или
U2: = -sign V2
Управляющий сигнал U1 или U2 транслируется в БОУСМНРД 3, где по нему выбирается соответствующее управляющее воздействие, которое затем кодируется и передается для сравнения в соответствующие блоки БФУСНПОКСБ 19 (для получения ±ΔVyк) или в БФУСНВОКСБ 20 (для получения ±ΔVzк). Указанные блоки входят в состав БФУСМРДЛДСТРУ 15.
При совпадении указанных кодов идут соответствующие номерам РД команды в БОЗПИРДЛДСТРУ 16, где они преобразуются, усиливаются и транслируются на РД, входящие в состав БРДЛДСТРУ 17. Дальнейшая логика работы указанных блоков соответствует их логике работы в системе-прототипе.
Первоначальный момент выбора коррекции одновременно в двух или одном направлении производится в БОУСМНРД 3 при помощи БЗПУКА 10. В таком случае в БОУСМНРД 3 кодируется соответствующая информация и передается в БФУСОДОК 34 или в один из двух ранее указанных блоков БФУСНПОКСБ 19, БФУСНВОКСБ 20.
При работе кинематического контура управления, входящего в состав БОУСМНРД 3, производится выставка требований на управление в динамический контур. Указанные требования формируются в виде кодов управляющих сигналов на получение ± Mx, ±My и ±Mz, которые соответственно транслируются в блоки БФУМООСБНСНК 18, БФУМОПОСБСНК 35 и БФУМОВОСБСНК 36.
Реализация предложенного способа управления осуществляется одним блоком РД коррекции и управления относительно центра масс с направленными под углом к осям связанного базиса и смещенными относительно центра масс линиями действия сил тяг.
На фиг. 12 показано размещение блока РД на корпусе геостационарного спутника, использующего для управления, например, равнотяговые ЭРД. Номера двигателей 1 - 8 соответствуют позициям РД, указанным на фиг. 8. На фиг. 12 пунктиром показан также корпус спутника, на котором установлены поворотные СБ. Угол установки двигателей α соответствует фиг. 7.
Как видно из фиг. 6 - 8, двигатели установлены в двух плоскостях, параллельных базовой плоскости YOZ. Каждая плоскость равноудалена от базовой, а продольные оси двигателей не проходят через центр масс КА.
Для однозначности установки определим проекции управляющих сил и моментов от каждого двигателя на оси связанного базиса OXYZ. При этом введем обобщенные обозначения: P2, P3 - значения проекций векторов сил тяги на оси связанного базиса OY и OZ от РД1 - РД8 соответственно;
M1, M2, M3 - значения проекций векторов моментов от действия сил тяги двигателей РД1 - РД8 на оси связанного базиса OX, OY, OZ соответственно.
Исходя из действий способа, реализуемых системой, и в соответствии с выражениями (3) - (7) можно записать:
P2 = Py; P3 = Pz; r1 = rx; r2 = ry; r3 = rz;
M1 = ryPz - rzPy = r2P3 - r3P2;
M2 = rxPz = r1P3;
M3 = rxPy = r1P2.
Тогда значения сил и моментов можно представить в соответствии с таблицей (см. приложение).
Как видно из таблицы, мы имеем определенное соотношение значений управляющих сил и моментов. В данном случае для реактивного блока оно привязано к 8-ми двигателям. Это число РД является минимальным для реализации предлагаемого способа управления, предполагающего квазинезависимое управление КА как вокруг центра масс, так и в случае его перемещения в четырех направлениях.
Однако, как видно из таблицы, левый столбик имеет чисто условное значение. Если поменять местами номера двигателей или в каждую из строчек вписать, например, их n-е число, то при сохранении указанного в таблице соотношения управляющих сил и моментов все заложенные принципы способа квазинезависимого управления КА сохраняются.
Таким образом, можно проектировать и другие реактивные блоки, содержащие секции реактивных двигателей, расположенных под различными углами к осям связанного базиса, с осями, не проходящими через центр масс КА. При этом за счет соблюдения соотношения управляющих сил и моментов, указанного в таблице, сохраняются определенные способом принципы управления КА.
Указанная на фиг. 12 схема расположения 8 ЭРД, входящих в блок РД, предложена авторами для системы управления движением одного геостационарного спутника, разрабатываемого на нашем предприятии.
Приведем в качестве примера некоторые расчетные значения величин для указанного спутника:
α = 42,5o;
P2 = 0,0265н; P3 = 0,0289н;
M1 = 0,01183н•м; M2 = 0,00237н•м; M3 = 0,00217н•м.
Проведенные опытно-конструкторские проработки показали, что предложенные способ управления, система его реализующая и блок реактивных двигателей системы позволят сократить массу геостационарного спутника, по сравнению со спутником-прототипом (см. [4]), примерно на 80...100 кг.
Если использовать расчетно-графическую зависимость годовой стоимости канала связи от массы спутника при его сроке службы 10 лет, приведенную в [4] на стр. 88 - 89 (например: при уменьшении массы на 150 кг, уменьшается стоимость на 1,4 миллиона расчетных единиц), то экономический эффект, достигаемый за счет уменьшения массы спутника, составит ≈ 0,9 миллиона расчетных единиц.
Эффект достигается прежде всего за счет использования во всех динамических операциях в качестве исполнительных органов ЭРД, имеющих высокий удельный импульс, на порядок больший, чем у химических РД. Тем самым удается уменьшить потребную массу топлива на выполнение всей 10-ти годичной программы полета.
Кроме того, выигрыш в массе спутника достигается также из-за уменьшения необходимого числа РД в блоке. Так, вместо 18 РД в блоке спутника-прототипа, необходимо всего 8 ЭРД для реализации тех же функциональных задач.
Литература:
1 Spacecraft attitude and velocity control system. US Patent N 5130931. Jul. 14, 1992.
2. В.С. Ковтун и др. Система управления ориентацией КА с силовыми гироскопами. Заявка N 5032611/22 (012690)/ Патент RU 2006430 C1; 20.04.94.
3. Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией КА. М.: "Наука", 1974.
4. Х. Баснер, К. Фецер, Д.Е. Келле. Комбинированная система управления с химическими и электрическими двигателями для геостационарных спутников. В сб. "Датчики и вспомогательные системы КА. Роботы и манипуляторы." Труды 7-го Международного симпозиума ИФАК по автоматическому управлению в пространстве. Том 4, "Наука", 1978, стр. 83 - 89.
5. Техническое описание. ЩИ3.059.064_02 микроЭВМ "Электроника", 1990.
6. О.А. Петросян и др. Схемотехника БИС ПЗУ. М.: Радио и связь, 1987.








Изобретение относится к области управления движением космических аппаратов (КА) с помощью реактивных двигателей (РД), преимущественно электрореактивных, устанавливаемых на геостационарных спутниках. В предлагаемом способе к корпусу КА прикладывают по трем осям связанного базиса управляющие моменты сил тяг РД, установленных - по четыре равнотяговых секции - в двух параллельных базовой плоскости ("север-восток") равноудаленных от нее плоскостях, обеспечивая суммирование проекций этих моментов на ось требуемого управляющего момента и компенсацию по остальным осям. При этом коррекцию орбиты КА по двум направлениям (связанным осям, например, "север-юг" и "запад-восток") производят тягами РД, проекции которых совпадают с данными направлениями (осями), а возмущающие моменты по этим осям взаимно компенсируются. Для создания по третьей оси момента, противоположного возмущающему, применяют РД с взаимной компенсацией их моментов и тяг по указанным двум осям. С помощью введенного в предлагаемую систему блока превышения скорости коррекции устраняют данное превышение по одной из осей коррекции посредством РД с компенсацией их тяг на другую ось коррекции. Изобретение позволяет уменьшить число РД и затраты топлива, исключив влияние факелов РД на бортовую аппаратуру КА. 3 с.п.ф-лы, 12 ил., 1 табл.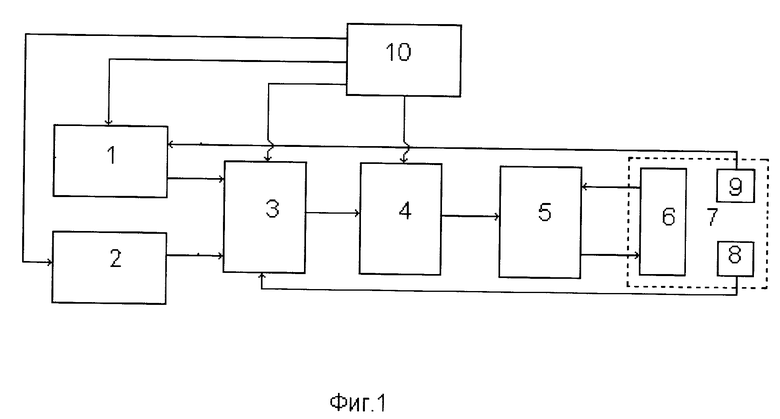
 линейной скорости коррекции по указанным осям, отличающийся тем, что к корпусу КА прикладывают управляющие моменты одновременно по трем осям связанного базиса путем установки РД в параллельных плоскостях и включения тех из них, проекции векторов управляющих моментов которых на ось требуемого управляющего момента суммируются, а относительно остальных осей связанного базиса - взаимно компенсируются, при этом коррекцию орбиты КА производят путем приложения тяг от тех РД, установленных в указанных параллельных плоскостях, проекции векторов тяг которых направлены вдоль векторов
линейной скорости коррекции по указанным осям, отличающийся тем, что к корпусу КА прикладывают управляющие моменты одновременно по трем осям связанного базиса путем установки РД в параллельных плоскостях и включения тех из них, проекции векторов управляющих моментов которых на ось требуемого управляющего момента суммируются, а относительно остальных осей связанного базиса - взаимно компенсируются, при этом коррекцию орбиты КА производят путем приложения тяг от тех РД, установленных в указанных параллельных плоскостях, проекции векторов тяг которых направлены вдоль векторов  а возмущающие моменты относительно первой и второй осей связанного базиса, совпадающих с направлениями коррекции, взаимно компенсируются, причем для компенсации возмущающих моментов относительно третьей оси связанного базиса прикладывают управляющие моменты от расположенных в тех же плоскостях РД, проекции векторов моментов которых на указанные первую и вторую оси связанного базиса и проекции их сил на эти оси взаимно компенсируются, а проекции векторов управляющих моментов на третью ось направлены противоположно указанным возмущающим моментам, при этом коррекцию орбиты продолжают до начала выполнения условий
а возмущающие моменты относительно первой и второй осей связанного базиса, совпадающих с направлениями коррекции, взаимно компенсируются, причем для компенсации возмущающих моментов относительно третьей оси связанного базиса прикладывают управляющие моменты от расположенных в тех же плоскостях РД, проекции векторов моментов которых на указанные первую и вторую оси связанного базиса и проекции их сил на эти оси взаимно компенсируются, а проекции векторов управляющих моментов на третью ось направлены противоположно указанным возмущающим моментам, при этом коррекцию орбиты продолжают до начала выполнения условий
где  величины кажущейся скорости КА в заданных направлениях коррекции,
величины кажущейся скорости КА в заданных направлениях коррекции,
после чего определяют вектор превышения скорости коррекции и компенсируют его путем приложения направленных противоположно ему векторов тяг РД, установленных в указанных параллельных плоскостях, взаимно компенсируя проекции векторов этих тяг на другую ось коррекции, а также возникающие от них возмущающие моменты относительно трех осей связанного базиса, и прекращают приложение векторов тяг по достижении кажущейся скоростью КА превышенной величины скорости коррекции.
| Баснер Х., Фецер К., Келле Д.Е | |||
| Комбинированная система управления с химическими и электрическими двигателями для геостационарных спутников | |||
| В сб.: Датчики и вспомогательные системы КА | |||
| Роботы и манипуляторы | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Т | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| - М.: Наука, 1978, с | |||
| Пуговица | 0 |
|
SU83A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент US, N 5130931 A, 14.07.92 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент RU, N 2006430 C1, 20.04.94 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Раушенбах Б.И., Токарь Е.Н | |||
| Управление ориентацией КА | |||
| - М.: Наука, 1974. | |||
