Изобретение относится к системам программного управления сложными машинами и механизмами и преимущественно может быть использовано при создании адаптивных роботов, в том числе осуществляющих сборку деталей типа втулка-вал.
Одной из проблем в данной области является разработка функционально гибких, быстродействующих систем управления сборочными роботами, обеспечивающих им высокую производительность при выполнении различных сборочных операций.
Известно устройство для управления сборочными роботами, которое содержит пульт управления, генератор, два реверсивных счетчика, два дешифратора, пять триггеров, элемент задержки, десять элементов И, элемент НЕ и два элемента ИЛИ и по каждой координате Х, Y, Z два элемента И, коммутатор, шаговый двигатель, датчик момента, исполнительный механизм (авт. св. СССР N 875331, кл. G 05 B 11/00, 1979).
Аналогом является также устройство для управления сборочным роботом, содержащее пульт управления, логический блок, два триггера, элемент ИЛИ, два элемента НЕ и по каждой координате X, Y, Z два элемента И, усилитель, двигатель, датчик момента и исполнительный механизм (авт. св. СССР N 989534, кл. G 05 D 11/00, 1980).
Такие устройства имеют низкое быстродействие при выполнении сборочных операций и, как следствие, низкую производительность сборочного робота при несоосности собираемых деталей из-за последовательного выполнения большого количества (пять и более) поисковых перемещений; сравнительно узкую область применения из-за недостаточной функциональной гибкости, так как они рассчитаны для выполнения сборочной операции только в направлении одной оси координат; пониженную скорость перемещения или повышенные развиваемые усилия при выполнении элементарной операции "наезд на упор" в ходе осуществления сборочной операции из-за "неохвата" моментной обратной связью исполнительного механизма; недостаточную надежность функционирования и малое быстродействие из-за использования приводов на шаговых электродвигателях с разомкнутой по положению системой управления (для первого аналога).
Часть указанных недостатков устранена или уменьшено их влияние в устройстве для управления сборочным роботом, которое содержит блок задания программы, блок переключения координат, логический блок, коммутатор и по каждой координате X, Y, Z сумматор, регистр, цифроаналоговый преобразователь, ключ, усилитель, двигатель, датчик тока, редуктор, датчик положения и исполнительный механизм (авт. св. СССР N 1075233, кл. G 05 B 19/00, 1982).
Прототип имеет низкое быстродействие при выполнении сборочных операций и, как следствие, низкую производительность сборочного робота, сравнительно узкую область применения, пониженную скорость или повышенные развиваемые усилия при выполнении элементарной операции "наезд на упор" в ходе осуществления сборочной операции. Причина первого недостатка заключается в том, что при частичной или полной (по двум координатам) несоосности сопрягаемых деталей для выполнения сборочной операции функциональная схема прототипа должна реализовать сравнительно большое количество (в случае полной несоосности пять) последовательных перемещений приводами координат. Причина второго недостатка заключается в том, что устройство рассчитано на "жесткий" цикл элементарных операций для выполнения сборочной операции только в направлении одной определенной координаты. Причина третьего недостатка заключается в том, что функциональное построение прототипа не обеспечивает качественную работу моментной системы автоматического регулирования при выполнении элементарной операции "наезд на упор", входящей в состав цикла сборки, так как измерение усилий, развиваемых схватом робота, производится с небольшой точностью косвенным методом (с помощью датчика тока), и, кроме того, моментная обратная связь не охватывает большое количество функциональных узлов: двигатель, редуктор и исполнительный механизм.
Целью изобретения является увеличение быстродействия и степени универсальности устройства.
Для достижения цели в систему программного управления сборочным устройством, содержащую последовательно соединенные генератор импульсов, делитель частоты, преобразователь фаза - код, первый сумматор и ПИД-регулятор, а также первый коммутатор, выход которого подключен к управляющему входу преобразователя фаза - код, по каждой координате X, Y, Z последовательно соединенные преобразователь код - ширина импульса, преобразователь-усилитель и двигатель, связанный через редуктор с исполнительным органом и датчиком абсолютных положений, выход которого соединен с соответствующим информационным входом первого коммутатора, и схват, расположенный на конечном исполнительном органе, перемещающемся по всем трем координатам, введены трехстепенной датчик усилий, встроенный в основание схвата сборочного устройства и ориентированный в пространстве по осям координат Х, Y, Z, первый буферный регистр, последовательно соединенные второй коммутатор, аналого-цифровой преобразователь (АЦП), второй сумматор и второй буферный регистр, а также формирователь сигналов включения, первый и второй формирователи импульсов выборки, формирователь импульсов записи, дешифратор каналов и задающий блок памяти, соединенный первым, вторым и третьим задающими входами соответственно с первым, вторым и третьим выходами дешифратора канала, а также с первыми, вторыми и третьими входами формирователя импульсов записи, первого и второго формирователей импульсов выборки, четвертым задающим входом с первым выходом первого сумматора, пятым задающим входом с вторым выходом второго сумматора, первым, вторым и третьим выходами соответственно с первым, вторым, и третьим входами формирователя сигналов включения, с группой входов управления первого коммутатора и первого формирователя импульсов выборки, четвертым, пятым и шестым выходами соответственно с четвертым, пятым и шестым входами формирователя сигналов включения и с группой входов управления второго формирователя импульсов выборки, первой группой информационных выходов с второй группой входов первого сумматора, а второй группой информационных выходов с второй группой входов второго сумматора, при этом первый, второй и третий выходы трехстепенного датчика усилий подключены соответственно к первому, второму и третьему информационным входам второго коммутатора, первый и второй входы которого соединены соответственно с первым и вторым входами дешифратора каналов и с вторым и третьим выходами делителя частоты, группа информационных входов первого буферного регистра соединена с группой информационных выходов ПИД-регулятора, группы информационных выходов первого и второго буферных регистров объединены между собой и с группой входов преобразователей код - ширина импульса координат X, Y, Z, управляющие входы которых соединены соответственно с первым, вторым и третьим выходами формирователя импульсов записи, выходы первого и второго формирователей импульсов выборки подключены к входам управления считывания соответственно первого и второго буферных регистров, первый, второй и третий выходы формирователя сигналов включения соединены с входами включения преобразователей-усилителей соответственно координат X, Y, Z.
Задающий блок памяти содержит восемь элементов И, два элемента ИЛИ, два одновибратора, триггер, счетчик операций, элемент памяти моментов, элемент памяти моментного режима, элементы памяти координат Х, Y. Z и элемент памяти позиционного режима, а также два элемента задержки и два элемента НЕ, причем первый задающий вход блока соединен с первым входом элемента памяти моментов и первым входом первого элемента И, выход которого подключен к первому входу второго элемента И, выход которого соединен с первым входом первого элемента ИЛИ, выходом подключеного к первому входу второго элемента ИЛИ, выход которого соединен с входом первого одновибратора, выход которого подключен к R-хводу триггера, прямой выход которого соединен с входом первого элемента задержки, выход которого через второй одновибратор подключен к счетному входу счетчика операций, группа информационных выходов которого соединена с группами входов элементов памяти моментного режима и памяти позиционного режима, вход второго элемента задержки соединен с выходом второго одновибратора, а выход - с S-входом триггера, выход которого соединен с управляющим  -входом элементов памяти моментного режима и позиционного режима, группа информационных выходов последнего соединена с соответствующей группой адресных входов элементов памяти соответствующей координаты, группы выходов которых подключены к первой группе информационных выходов задающего блока памяти, первый, второй и третий выходы элемента памяти позиционного режима соединены с соответствующими управляющими входами элементов памяти координат и соответственно с первым, вторым и третьим выходами блока, второй задающий вход которого подключен к первому входу третьего элемента И и к второму входу элемента памяти моментов, третий вход которого соединен с третьим задающим входом блока и с первым входом четвертого элемента И, вторым входом соединенного с пятым задающим входом блока и с вторыми входами первого и третьего элементов И, выход третьего элемента И соединен с первым входом пятого элемента И, выход которого подключен к второму входу первого элемента ИЛИ, третий вход которого соединен с выходом шестого элемента И, первый вход которого подключен к выходу четвертого элемента И, а второй вход - к первому входу седьмого элемента И и через первый элемент НЕ к первому информационному входу элемента памяти моментного режима и к четвертому входу элемента памяти моментов, выход седьмого элемента И соединен с вторым входом пятого элемента И, а второй вход - с вторым входом второго элемента И и через второй элемент НЕ с вторым информационным выходом элемента памяти моментного режима и с пятым входом элемента памяти моментов, управляющий
-входом элементов памяти моментного режима и позиционного режима, группа информационных выходов последнего соединена с соответствующей группой адресных входов элементов памяти соответствующей координаты, группы выходов которых подключены к первой группе информационных выходов задающего блока памяти, первый, второй и третий выходы элемента памяти позиционного режима соединены с соответствующими управляющими входами элементов памяти координат и соответственно с первым, вторым и третьим выходами блока, второй задающий вход которого подключен к первому входу третьего элемента И и к второму входу элемента памяти моментов, третий вход которого соединен с третьим задающим входом блока и с первым входом четвертого элемента И, вторым входом соединенного с пятым задающим входом блока и с вторыми входами первого и третьего элементов И, выход третьего элемента И соединен с первым входом пятого элемента И, выход которого подключен к второму входу первого элемента ИЛИ, третий вход которого соединен с выходом шестого элемента И, первый вход которого подключен к выходу четвертого элемента И, а второй вход - к первому входу седьмого элемента И и через первый элемент НЕ к первому информационному входу элемента памяти моментного режима и к четвертому входу элемента памяти моментов, выход седьмого элемента И соединен с вторым входом пятого элемента И, а второй вход - с вторым входом второго элемента И и через второй элемент НЕ с вторым информационным выходом элемента памяти моментного режима и с пятым входом элемента памяти моментов, управляющий  -вход которого соединен с выходом восьмого элемента И, первый, второй и третий входы которого подключены соответственно к третьему, четвертому и пятому информационным выходам элемента памяти моментного режима и к четвертому, пятому и шестому выходам блока, шестой информационный выход элемента памяти моментного режима и группа информационных выходов элемента памяти моментов соединены с второй группой информационных выходов задающего блока памяти, четвертый задающий вход которого подключен к второму входу второго элемента ИЛИ. Это позволяет реализовать новый алгоритм работы устройства с использованием трехстепенного датчика усилий, контролирующего усилия непосредственно на схвате робота или другого механизма, и датчиков абсолютных положений на каждой координате, обеспечивающих одновременное управление приводами всех координат по принципу мультиплексирования в режиме моментного автоматического регулирования. В результате сборочная операция выполняется за один "проход": одновременно идет основное движение сборки и самовведение по двум другим координатам, что значительно повышает быстродействие системы и производительность робота.
-вход которого соединен с выходом восьмого элемента И, первый, второй и третий входы которого подключены соответственно к третьему, четвертому и пятому информационным выходам элемента памяти моментного режима и к четвертому, пятому и шестому выходам блока, шестой информационный выход элемента памяти моментного режима и группа информационных выходов элемента памяти моментов соединены с второй группой информационных выходов задающего блока памяти, четвертый задающий вход которого подключен к второму входу второго элемента ИЛИ. Это позволяет реализовать новый алгоритм работы устройства с использованием трехстепенного датчика усилий, контролирующего усилия непосредственно на схвате робота или другого механизма, и датчиков абсолютных положений на каждой координате, обеспечивающих одновременное управление приводами всех координат по принципу мультиплексирования в режиме моментного автоматического регулирования. В результате сборочная операция выполняется за один "проход": одновременно идет основное движение сборки и самовведение по двум другим координатам, что значительно повышает быстродействие системы и производительность робота.
Предложенный состав функциональных узлов и их взаимосвязей обеспечивает также функциональную гибкость системы пpограммного управления как в части выбора различных характеристик позиционирования, так и в части выбора последовательности включения приводов, их совместного или раздельного движения, работы в режиме позиционной следящей системы или моментной системы регулирования, что позволяет осуществлять сборочные и другие технологические операции ("мягкая стыковка", "дозирование усилий", "нанизывание", "нормированный удар", "свободное позиционирование" и др.) в направлении любой координатной оси. Кроме того, использование в качестве элемента очувствления трехстепенного датчика усилий, встроенного непосредственно в основание схвата, обеспечивает качественную работу приводов в режиме моментной системы автоматического регулирования и, в конечном итоге, качественное и быстрое выполнение роботом различных сборочных и технологических операций.
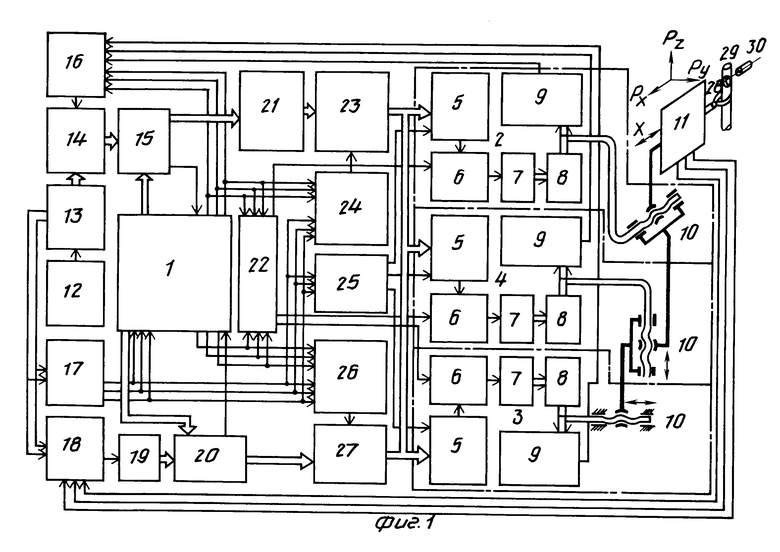
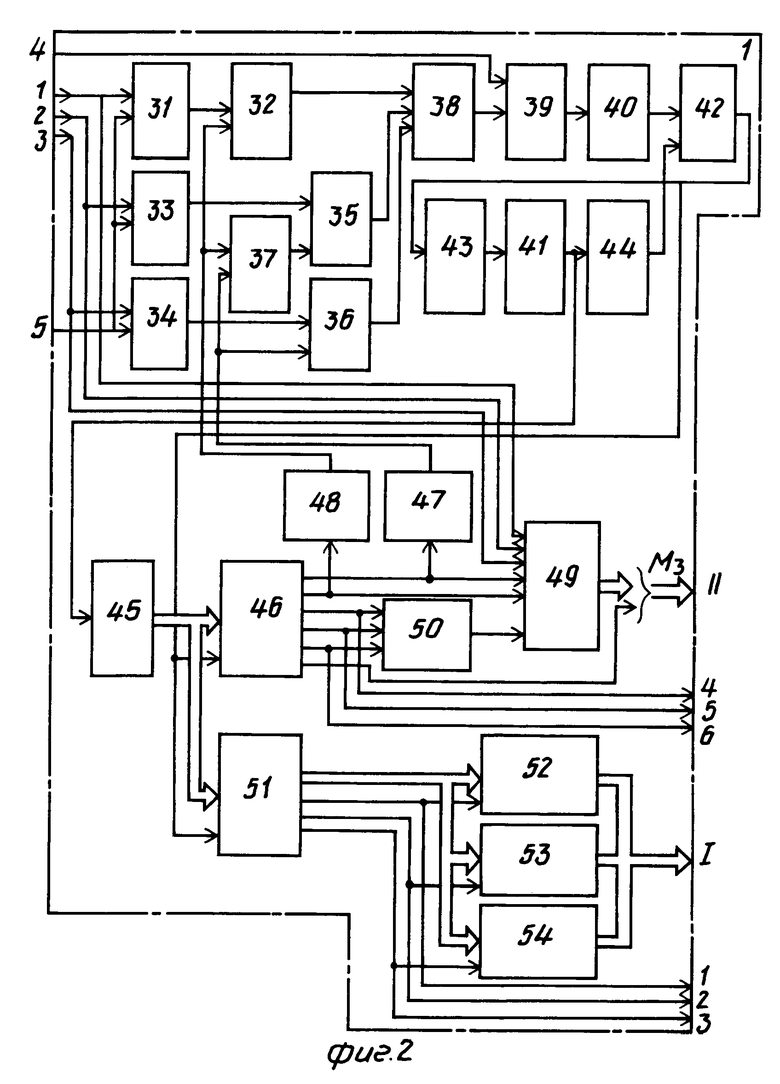
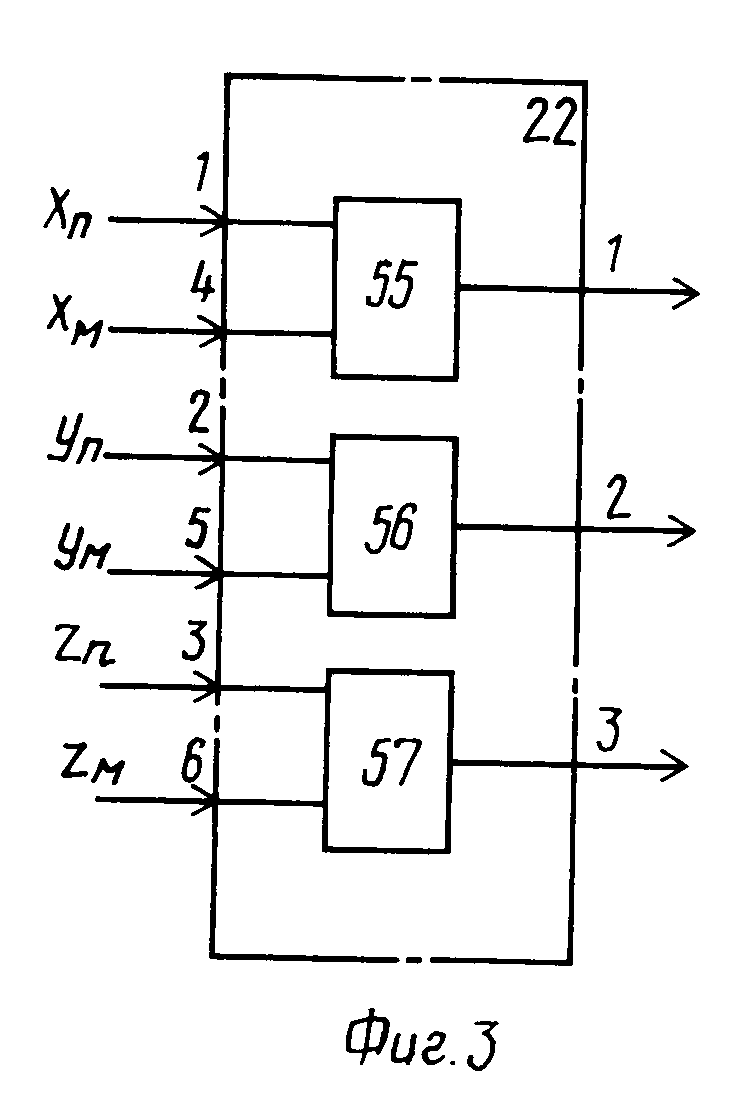
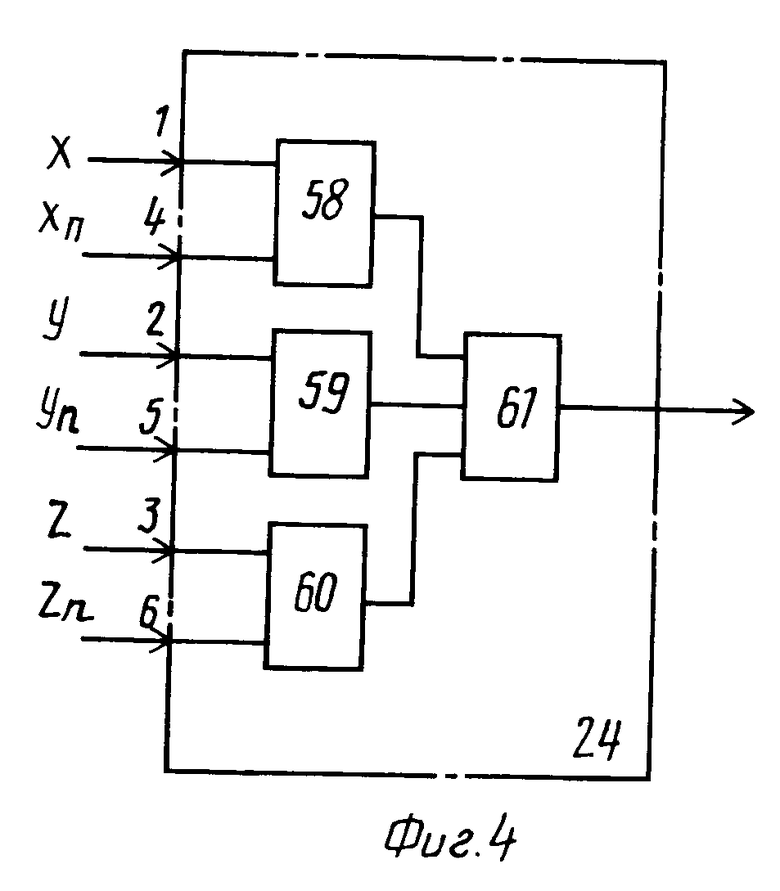
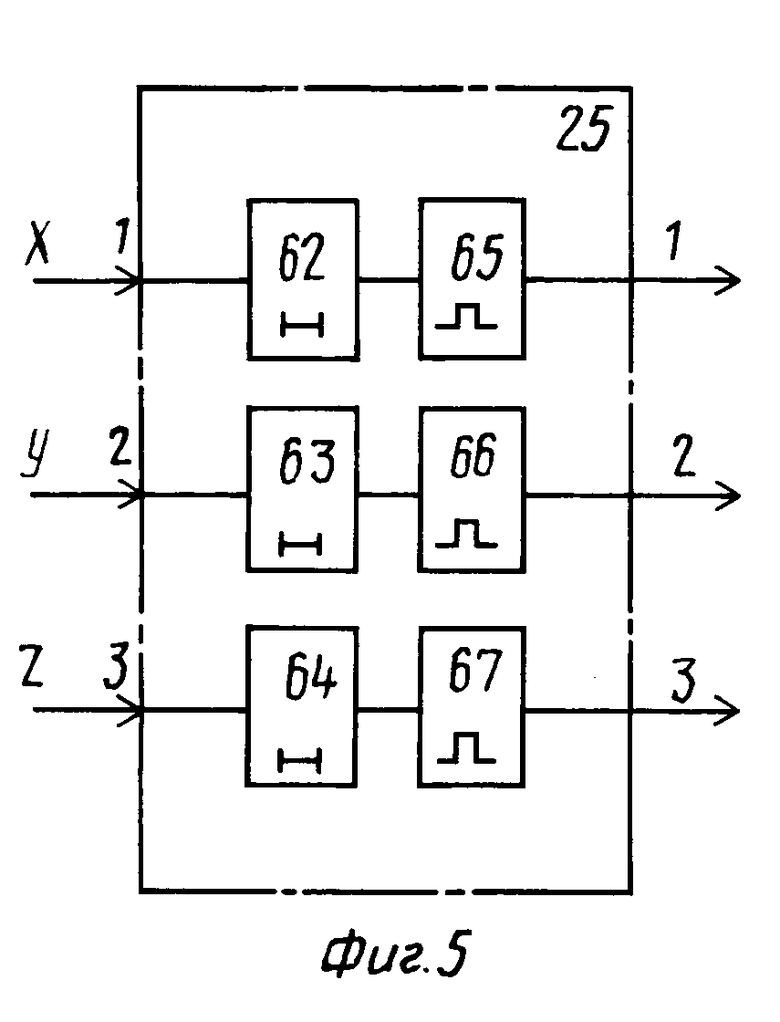
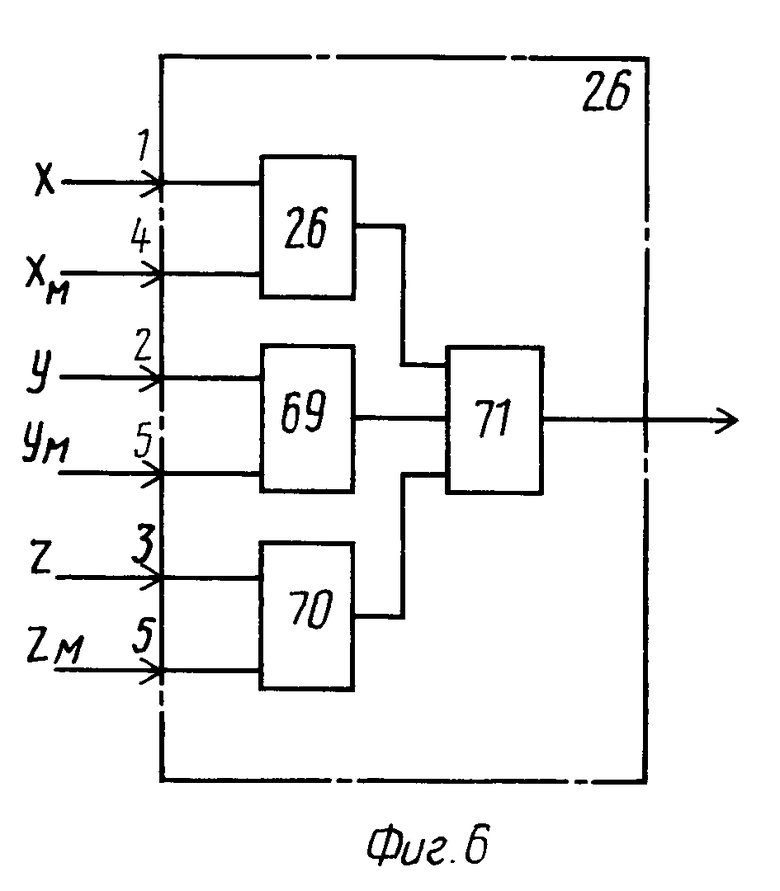
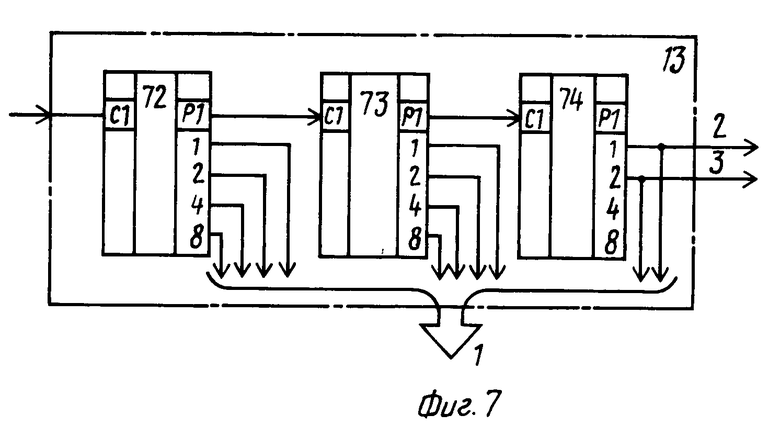
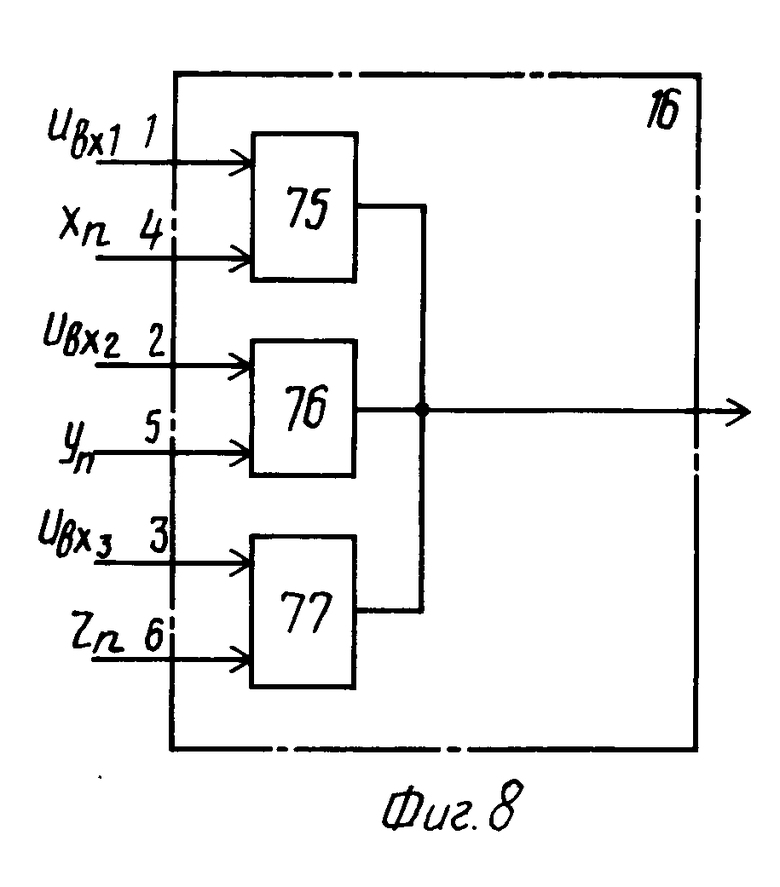
На фиг. 1 представлена функциональная схема предлагаемой системы; на фиг. 2 - функциональная схема задающего блока памяти; на фиг. 3 - функциональная схема формирователя сигналов включения; на фиг. 4 - функциональная схема первого формирователя импульсов выборки; на фиг. 5 - функциональная схема формирователя импульсов записи; на фиг. 6 - функциональная схема второго формирователя импульсов выборки; на фиг. 7 - функциональная схема делителя частоты; на фиг. 8 - функциональная схема первого коммутатора.
Система содержит задающий блок 1 памяти, приводы 2, 3, 4 координат X, Y, Z соответственно, преобразователи 5 код - ширина импульса, преобразователи-усилители 6, двигатели 7, редукторы 8, датчики 9 абсолютных положений, исполнительные органы 10, трехстепенной датчик 11 усилий, генератор 12 импульсов, делитель 13 частоты, преобразователь 14 фаза-код, первый сумматор 15, первый коммутатор 16, дешифратор 17 каналов, второй коммутатор 18, АЦП 19, второй сумматор 20, ПИД-регулятор 21, формирователь 22 сигналов включения , первый буферный регистр 23, первый формирователь импульсов выборки , формирователь 25 импульсов записи, второй формирователь 26 импульсов выборки, второй буферный регистр 27, схват 28, собираемые детали 29 и 30. На фиг. 1 Хп, Yп, Zп - программные сигналы выбора позиционного режима соответствующего привода, Xм, Yм, Zм - программные сигналы выбора моментного режима одного, двух или всех приводов, X, Y, Z - мультиплексные сигналы обслуживания соответствующих координат, сигналы функциональных блоков представлены двоичными кодами: Пт - позиция текущая, Пз - позиция задания, Пр - рассогласование по позиции, Пу - управление по позиции, Пр = 0 - команда выполнения позиционной операции, Мт - момент текущий, Мз - момент задания, Мр - рассогласование по моменту, Му - управление по моменту, Мр ≠ 0 - команда выполнения моментной операции, Рх, Рy, Pz - усилия, развиваемые на схвате по соответствующим координатным осям и измеряемые трехстепенным датчиком усилий.
Задающий блок 1 памяти (фиг. 2) содержит первый-седьмой элементы И 31-37, первый и второй элементы ИЛИ 38 и 39, первый и второй одновибраторы 40 и 41, триггер 42, первый и второй элементы 43 и 44 задержки, счетчик 45 операций, элемент 46 памяти моментного режима, первый и второй элементы НЕ 47 и 48, элемент 49 памяти моментов, восьмой элемент И 50, элемент 51 памяти позиционного режима и элементы 52-54 памяти координат Х, Y, Z. На фиг. 2 Р1 и Р2 - программные сигналы выбора типа технологической операции 3нМз - программный сигнал выбора знака момента задания,  - управляющие входы элементов памяти.
- управляющие входы элементов памяти.
Формирователь 22 сигналов включения (фиг. 3) содержит третий, четвертый и пятый элементы ИЛИ 55, 56 и 57 соответственно. Первый формирователь 24 импульсов выборки (фиг. 4) содержит девятый, десятый и одиннадцатый элементы И 58, 59 и 60 соответственно и шестой элемент ИЛИ 61. Формирователь 25 импульсов записи (фиг. 5) содержит третий, четвертый и пятый элементы 62, 63 и 64 задержки соответственно и третий, четвертый и пятый одновибраторы 65, 66 и 67 соответственно. Второй формирователь 26 импульсов выборки (фиг. 6) содержит двенадцатый, тринадцатый и четырнадцатый элементы И 68, 69 и 70 соответственно и седьмой элемент ИЛИ 71. Делитель 13 частоты (фиг. 7) содержит счетчики 72, 73 и 74. Первый коммутатор 16 (фиг. 8) содержит первый, второй и третий аналоговые ключи 75, 76 и 77 соответственно.
Задающий блок 1 памяти вырабатывает в ходе выполнения механизмом автоматического цикла программные сигналы включения соответствующих приводов и выбора их режима работы: Хп, Yп, Zп и Хм, Yм, Zм, кроме того, хранит и выдает в нужные моменты времени двоичный код позиции задания Пз в первый сумматор 15 и двоичный код задания скорости или момента Мз во второй сумматор 20. Преобразователь 5 код-ширина импульса преобразуют двоичные коды, поступающие с общей шины управления, в широтно-импульсные сигналы. Преобразователи-усилители 6 преобразуют широтно-импульсные сигналы в сигналы управления силовыми транзисторными ключами, образующими мостовую схему, и непосредственно управляют электродвигателями 7.
В качестве датчиков 9 абсолютных положений используются синусно-косинусные вращающиеся трансформаторы в режиме фазовращателей. Первый коммутатор 16 в зависимости от управляющих команд с задающего блока 1 памяти пропускает на вход преобразователя 14 фаза-код выходной сигнал с соответствующего датчика 9 абсолютных положений. Генератор 12 импульсов вырабатывает тактовые импульсы эталонной частоты.
Делитель 13 частоты формирует сетку частот, необходимую для работы преобразователей 14 фаза-код по принципу "бегущая метка" и осуществления одновременного управления приводами координат по принципу мультиплексирования в режиме моментного автоматического регулирования. Первый сумматор 15 вычисляет код рассогласования по позиции Пр, равный разности двоичного кода позиции задания Пз и двоичного кода текущей позиции Пт, и вырабатывает команду Пр = 0. Дешифратор 17 каналов формирует мультиплексные сигналы обслуживания приводов 3, 4, 5: X, Y, Z.
В качестве трехстепенного датчика 11 усилий используется втулка с четырьмя фигурными прорезями, образующими виток "прорезной пружины"переменного сечения с площадками, на которых наклеены тензорезисторы. Второй коммутатор 18 поочередно с частотой мультиплексирования подключает на вход АЦП 19 выходные сигналы с трехстепенного датчика 11 усилий. Второй сумматор 20 вычисляет код рассогласования по моменту Мр, равный разности двоичного кода момента задания Мз и двоичного кода текущего момента Мт, и вырабатывает команду Мр = 0. ПИД-регулятор 21 преобразует двоичный код сигнала рассогласования по позиции Пр в двоичный код управления по позиции Пу, формируя последний по определенному закону, чтобы обеспечить соответствующему приводу необходимые скорости и ускорения для реализации требуемой характеристики позиционирования в процессе выхода на заданную координату.
Формирователь 22 сигналов включения вырабатывает в зависимости от программных сигналов задания на его входах команды, поступающие на соответствующие преобразователи-усилители 6, которые переводят двигатели 7 из режима неуправляемого динамического торможения в режим управления. Первый и второй буферные регистры 23 и 27 реализованы на интегральных микросхемах с тремя устойчивыми состояниями на выходе и обеспечивают оперативное хранение кодов управления по позиции Пу и по моменту Му и прохождение их в необходимые моменты времени на общую шину управления приводами.
Первый и второй формирователи 24 и 26 импульсов выборки вырабатывают сигналы, разрешающие прохождение содержимого соответственно первого и второго буферных регистров 23 и 27 на общую шину управления приводами. Формирователь 25 импульсов записи вырабатывает сигналы перезаписи кодов управления с общей шины в преобразователи 5 код-ширина импульса соответствующих приводов.
Первый-седьмой элементы И 31-37, первый элемент ИЛИ 38, первый и второй элементы НЕ 47 и 48 реализуют блокировку сигнала Мр = 0 по соответствующим степеням свободы сборочного устройства при выполнении различных технологических операций. Второй элемент ИЛИ 39, первый и второй одновибраторы 40 и 41, триггер 42, первый и второй элементы 43 и 44 задержки и счетчик 45 операций обеспечивают после завершения текущей операции переход на новый кадр программы, а следовательно, на новую операцию.
Элементы 46 и 51 памяти моментного и позиционного режимов осуществляют покадровую запись, хранение и выборку технологической программы, содержащей информацию о типе операции, о выборе работающих одновременно приводов и их режиме и о знаке момента задания. Элемент 49 памяти моментов и элементы 52-54 памяти координат X, Y, Z осуществляют запись, хранение и выборку параметрической информации по соответствующим движениям о величине позиций и моментов задания.
Система программного управления работает следующим образом.
Рассмотрим выполнение одной из возможных сборочных операций: "нанизывание" в направлении координаты Х и рабочих элементов, 29 цилиндрической формы с цилиндрическим отверстием в верхней части на цилиндрический стержень 30.
Необходимо учесть, что активным логическим уровнем выходных сигналов управления и сигнала  для всех элементов памяти является логический "0", активным уровнем всех остальных сигналов - логическая "1".
для всех элементов памяти является логический "0", активным уровнем всех остальных сигналов - логическая "1".
Собираемые детали имеют фаски на сопрягаемых поверхностях. Первоначально схват 28 сборочного устройства с зажатой в нем ориентированной деталью 29 выводится приводами 3 и 4 координат Y и Z в исходную перед сборкой точку пространства с разрешенной погрешностью по каждой координате, меньшей суммы величин двух фасок по соответствующей координате, следующим образом.
По окончании выполнения сборочным устройством предыдущей технологической операции счетчик 45 операций задающего блока 1 памяти выбирает следующий кадр программы, где запрограммировано позиционирование по координате Y в исходную точку перед сборкой. При этом на соответствующем выходе элемента 51 памяти позиционного режима задающего блока 1 памяти появляется потенциальный сигнал Yп, который, во-первых, выбирает из элемента 53 памяти координат Y двоичный код позиции задания Пз, соответствующий позиции исходной перед сборкой точки пространства по оси Y; во-вторых, переключает первый коммутатор 16 в состояние, когда на вход преобразователя 14 фаза-код через второй аналоговый ключ 76 проходит сигнал с датчика 9 абсолютных положений привода 3, в-третьих, разрешает прохождение мультиплексного сигнала обслуживания Y привода 4 через десятый элемент И 59 и шестой элемент ИЛИ 61 первого формирователя 24 импульсов выборки на второй вход первого буферного регистра 23, в-четвертых, включает через четвертый элемент ИЛИ 56 формирователя 22 сигналов включения и через соответствующий преобразователь-усилитель 6 привод 3. Таким образом, оказывается замкнутой позиционная следящая система по координате Y. Преобразователь 14 фаза-код формирует на своем выходе двоичный код текущей позиции Пт исполнительного органа 10 координаты Y, который обновляется с частотой преобразования и поступает на первый сумматор 15, где вычитается из двоичного кода позиции задания Пз. В результате вырабатывается двоичный код рассогласования Пр, трансформируемый далее в ПИД-регуляторе 21 в двоичный код управления по позиции Пу. Последний хранится в первом буферном регистре 23, обновляется с частотой преобразования, а появляется на его выходе, а следовательно, и на общей шине управления только на время существования сигнала выборки с выхода первого формирователя 24 импульсов выборки, что соответствует прохождению мультиплексного сигнала Y обслуживания привода 3 координаты Y с выхода дешифратора 17 каналов. Внутри этого сигнала формирователем 25 импульсов записи с помощью четвертого элемента 63 задержки и четвертого одновибратора 66 вырабатывается импульс, записывающий код управления Пу в преобразователь 5 код-ширина импульса привода 3. Широтно-импульсный сигнал с преобразователя 5 через включенный преобразователь-усилитель 6 управляет двигателем 7, который начинает вращаться в сторону уменьшения рассогласования по позиции.
В момент точного выхода исполнительного органа 10 на координату исходной точки коды Пт и Пз становятся равными и первый сумматор 15 вырабатывает команду "рассогласование по позиции равно нулю" (Пр = 0), которая, пройдя второй элемент ИЛИ 39 и первый одновибратор 40, переключает триггер 42 в состояние "конец операции" и тем самым фиксирует в задающем блоке 1 памяти выполнение очередной элементарной технологической операции. При этом выходной сигнал триггера 42, непосредственно воздействуя на управляющие входы  элементов 46 и 51 памяти моментного и позиционного режимов, снимает (маскирует) информацию с их выходов, исчезает потенциальный сигнал Yп, что приводит к закрытию первого коммутатора 16, к снятию позиции задания Пз, к запрету появления импульса выборки и к отключению привода 3 через формирователь 22 сигналов включения и свой преобразователь-усилитель 6. Двигатель 7 переходит в режим интенсивного динамического торможения, останавливается и остается заторможенным, исполнительный орган привода 3 выходит на позицию исходной точки перед сборкой по оси Y с необходимой точностью. Далее задающий блок 1 памяти переходит к реализации следующего шага программы по выполнению новой элементарной операции, которой является выход схвата 28 сборочного устройства в исходную перед сборкой точку пространства по оси Z привода 4. Выходной сигнал триггера 42 кроме отключения элементов 46 и 51 памяти, пройдя первый элемент 43 задержки и второй одновибратор 41, переводит в следующее состояние счетчик 45 операций, на выходе которого таким образом формируется следующий адрес для элементов 46 и 51 памяти, затем после прохождения второго элемента 44 задержки переключает триггер 42 в первоначальное положение, на входах
элементов 46 и 51 памяти моментного и позиционного режимов, снимает (маскирует) информацию с их выходов, исчезает потенциальный сигнал Yп, что приводит к закрытию первого коммутатора 16, к снятию позиции задания Пз, к запрету появления импульса выборки и к отключению привода 3 через формирователь 22 сигналов включения и свой преобразователь-усилитель 6. Двигатель 7 переходит в режим интенсивного динамического торможения, останавливается и остается заторможенным, исполнительный орган привода 3 выходит на позицию исходной точки перед сборкой по оси Y с необходимой точностью. Далее задающий блок 1 памяти переходит к реализации следующего шага программы по выполнению новой элементарной операции, которой является выход схвата 28 сборочного устройства в исходную перед сборкой точку пространства по оси Z привода 4. Выходной сигнал триггера 42 кроме отключения элементов 46 и 51 памяти, пройдя первый элемент 43 задержки и второй одновибратор 41, переводит в следующее состояние счетчик 45 операций, на выходе которого таким образом формируется следующий адрес для элементов 46 и 51 памяти, затем после прохождения второго элемента 44 задержки переключает триггер 42 в первоначальное положение, на входах  элементов 46 и 51 памяти появляется открывающий потенциал, а на выходах - новая информация, а именно на соответствующем выходе элемента 52 памяти позиционного режима возникает потенциальный сигнал Zп, начинается выполнение новой операции. Операция протекает аналогично предыдущей с той только разницей, что в режиме позиционной следящей системы работает привод 4 координаты Z, и код позиции задания Пз выбирается из элементов 54 памяти координат Z.
элементов 46 и 51 памяти появляется открывающий потенциал, а на выходах - новая информация, а именно на соответствующем выходе элемента 52 памяти позиционного режима возникает потенциальный сигнал Zп, начинается выполнение новой операции. Операция протекает аналогично предыдущей с той только разницей, что в режиме позиционной следящей системы работает привод 4 координаты Z, и код позиции задания Пз выбирается из элементов 54 памяти координат Z.
На следующем шаге программы выполняется собственно сборочная операция по нанизыванию рабочего элемента 29 на цилиндрический стержень 30. На соответствующих выходах элементов 46 и 51 памяти моментного и позиционного режимов появляются программные потенциальные сигналы Хп, Yм, Zм и Р2. Сигнал Хп обеспечивает функционирование привода 2 координаты Х в режиме позиционной следящей системы аналогично рассмотренному выше, а сигналы Yм и Zм - приводов 3 и 4 в режиме моментной системы автоматического регулирования, в подрежиме моментной разгрузки. Последний выбирается кодом Р2 Р1. Сигналы с трехстепенного датчика 11 усилий, пропорциональные усилиям, развиваемым на схвате по соответствующим координатам (Рх, Рy, Pz), поочередно с частотой мультиплексирования подключаются вторым коммутатором 18, управляемым двухразрядным двоичным кодом от делителя 13 частоты, на вход АЦП 19, с выхода которого на первую группу входов второго сумматора 20 поступает двоичный код текущего момента Мт. Программные сигналы Yм и Zм через восьмой элемент И 50 разрешают выборку из элемента 49 памяти моментов в мультиплексном режиме в отведенные для обслуживания каналов Y и Z промежутки времени х, y двоичных кодов моментов задания Мз для приводов 3 и 4 (из области памяти, определяемой двоичным кодом режимных сигналов Р1 и Р2) и подачу их на вторую группу входов второго сумматора 20, который вычисляет коды рассогласования по моменту Мр = Мз - Мт и в качестве кодов управления Му передает для записи во второй буферный регистр 27, где в результате поочередно хранятся и обновляются с частотой мультиплексирования коды Му для координат Y и Z. Те же программные сигналы Yм и Zм соответственно через четвертый и пятый элементы ИЛИ 56 и 57 формирователя 22 сигналов включения переводят приводы 3 и 4 в рабочее состояние, а через тринадцатый и четырнадцатый элементы И 69 и 70 второго формирователя 26 импульсов выборки обеспечивают появление в соответствующие интервалы времени выходной информации второго буферного регистра 27 на общей шине управления для перезаписи ее соответствующими выходными сигналами формирователя, 25 импульсов записи в преобразователи 5 код-ширина импульса приводов 3 и 4. Таким образом, оказываются одновременно работающими все три степени подвижности сборочного устройства.
Необходимо отметить, что подрежиме моментной разгрузки, в котором работают привода 3 и 4 и который задается программно двоичным кодом Р2Р1 из элемента 46 памяти моментного режима, код Мз для обоих каналов равен нулю. Начинается движение исполнительного органа 10 координаты Х, а следовательно, и схвата 28 с деталью 29 в сторону детали 30 в режиме позиционирования. Исполнительные органы 10 приводов 3 и 4 остаются неподвижными, так как Мр = Мз - Мт = Му = 0.
При несоосности деталей 29 и 30 в пределах разрешенной погрешности первое контактирование происходит в зоне фасок. Возникает усилие, составляющие которого по осям координат непосредственно воспринимают трехстепенным датчиком 11 усилий, сигналы с которого по координатам Y и Z через второй коммутатор 18, АЦП 19, второй сумматор 20 и второй буферный регистр 27 управляют приводами 3 и 4, работающими в быстродействующем режиме моментной системы автоматического регулирования. Происходят микроперемещения исполнительных органов 10 координат Y и Z в направлении воздействия внешней силы со стороны неподвижной детали 30 на деталь 29, т.е. в направлении уменьшения несоосности и "ухода в зазор". Возникшие усилия уменьшаются до нуля (так как Мз = 0) и привода 3 и 4 прекращают отработку. Микроперемещение по оси Х приводит к повторному контактированию деталей и повторной аналогичной отработке усилий по осям Y и Z и т.д.
Описанное взаимодействие приводов несколько схематично, что сделано для пояснения физической сущности. Фактически они работают одновременно в непрерывном устойчивом динамическом режиме. Так как в моментной системе благодаря ее рациональному построению полностью реализуется быстродействие приводов, то в итоге прохождение сборочной операции осуществляется при непрерывном перемещении на значительной скорости по оси Х и одновременном самонаведении по осям Y и Z, при этом возникающие усилия по всем координатам не достигают даже номинальных разрешенных величин. При дальнейшем движении "нанизываемой" детали 29 вдоль детали 30 привода 3 и 4, по-прежнему работая в подрежиме моментной разгрузки, поддерживают между ними зазор, что гарантирует от заклинивания и значительно снижает требования к прямолинейности детали 30 и к величине кренов при ее установке и ориентации. Возникающие при этом, при отработке приводами Y и Z момента задания (Мз = 0), сигналы Мр = 0, поступающие из второго сумматора 20 в задающий блок 1 памяти, блокируются и не вызывают преждевременного завершения операции. На первом, третьем и четвертом элементах И 31 и 33, 35 дешифрируется принадлежность сигнала Мр = 0 соответствующему движению. Так как рассматриваемая технологическая операция "нанизывание" выбирается кодом Р2Р1 = 01, то сигнал Р1, пройдя первый элемент НЕ 48, запрещает через седьмой и пятый элементы И 37 и 35 прохождение сигнала Мр = 0 по оси Y с выхода третьего элемента И 33 на второй вход первого элемента ИЛИ 38, а через шестой элемент И 36 прохождение сигнала Мр= = 0 по оси Z с выхода четвертого элемента И 34 на третий вход первого элемента ИЛИ 38. В то же время при выходе по оси Х на заданную позицию с первого сумматора 15 в задающий блок 1 памяти проходит команда Пр= = 0 на завершение текущей операции и аналогично, как в рассмотренных выше операциях, снимаются программные сигналы, все привода останавливаются и остаются в режиме динамического торможения, сборочная операция закончена, задающий блок 1 памяти переходит на выполнение следующей элементарной операции "раскрытие схвата".
Возможен и просто реализуется другой вариант выполнения сборочной операции: требуется нанизать несколько деталей 29 на деталь 30, имеющую на противоположном от фаски торце жесткий упор, и не с расстановкой деталей 29 по своим позициям, а в плотную упаковку. В этом случае на шагах программы, где должна проходить сборочная операция, программируется появление на соответствующих выходах элемента 46 памяти моментного режима потенциальных сигналов Хм, Yм, и Zм. В результате все привода работают в режиме моментной автоматической системы регулирования по принципу мультиплексирования: привода 3 и 4 - рассмотренным выше образом в подрежиме моментной разгрузки (Мз = 0), а привод 2 - в подрежиме моментно-скоростного управления (Мз ≠ 0), т. е. при свободном движении исполнительного органа 10 координаты Х двоичный код Мз задает скорость перемещения, а "на упоре" - требуемое усилие нажима. Процесс самонаведения и нанизывания проходит аналогично описанному выше, но сигнал об окончании сборочной операции поступает в задающий блок 1 памяти из второго сумматора 20 в виде команды Мр = 0 после развития приводом 2 в направлении оси Х заданного усилия, соответствующего моменту задания Мз, т. е. при посадке детали 29 с усилием либо на упор детали 30, либо на предыдущую деталь 29.
Таким же образом соответствующим программированием в задающем блоке 1 памяти можно легко реализовать и другие технологические операции ("стыковка", "на упор" и т.п.) в любой последовательности, в направлении любой из координатных осей. Так, для реализации автоматической сборки в направлении оси Z c постановкой по позиции для деталей другой конфигурации программируется технологическая операция "стыковка" (Р2Р1 = 10). При выполнении этой операции на соответствующих выходах элементов 46 и 51 памяти появляются потенциальные сигналы Хм, Yм, Zп, далее идет позиционирование по оси Z, а привода 2 и 3 осуществляют моментную разгрузку по осям Х и Y, при этом сигнал Мр= 10 по оси Х блокируется вторым элементом И 32, а сигнал Мр = 0 по оси Y -седьмым и пятым элементами И 37 и 35.
Технологическая операция "на упор" выполняется сборочным устройством, когда неизвестны точные координаты детали 30, с целью вхождения с ней в механический контакт для дальнейшей сборки по более сложному алгоритму, чем рассмотренные выше, или с целью измерения и запоминания точных координат детали 30. Код этой операции Р2Р1 = 00. При ее выполнении на соответствующих выходах элемента 56 памяти моментного режима появляются кроме Р2 и Р1 сигнал выбора одного движения (Хм или Yм, Zм) и сигнал ЗнМз, определяющий направление движения, включается только один привод, который в подрежиме моментно-скоростного управления выводит сборочное устройство на контакт с деталью 30 с запрограммированным усилием, по достижении которого возникает сигнал Мр = 0, проходящий без блокировок по соответствующей цепи через первый элемент ИЛИ 38 на завершение операции. Привод останавливается и переходит в режим динамического торможения.
В итоге предлагаемая система управления позволяет сборочному устройству осуществлять в определенной последовательности в автоматическом цикле не только сборочные, но и операции измерения координат и самообучения, а также операции безаварийного контактного взаимодействия с другим технологическим оборудованием и объемом манипулирования, адаптируя его таким образом с окружающей средой, что говорит о большой функциональной гибкости предлагаемой системы и ее универсальности.
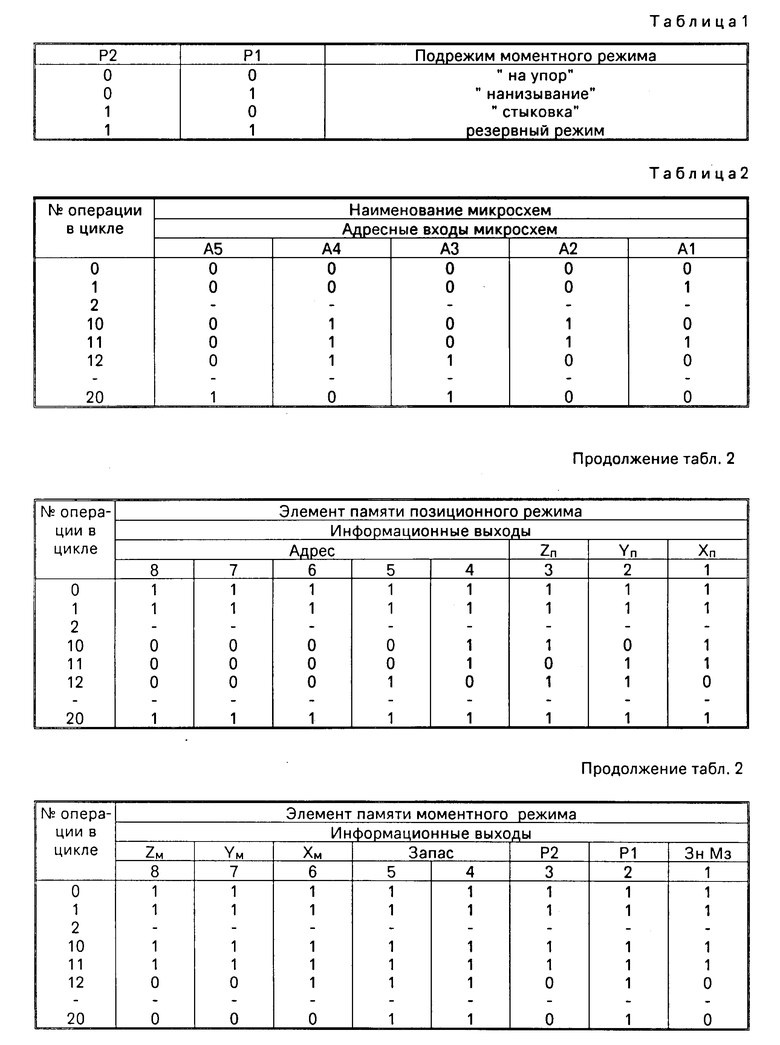
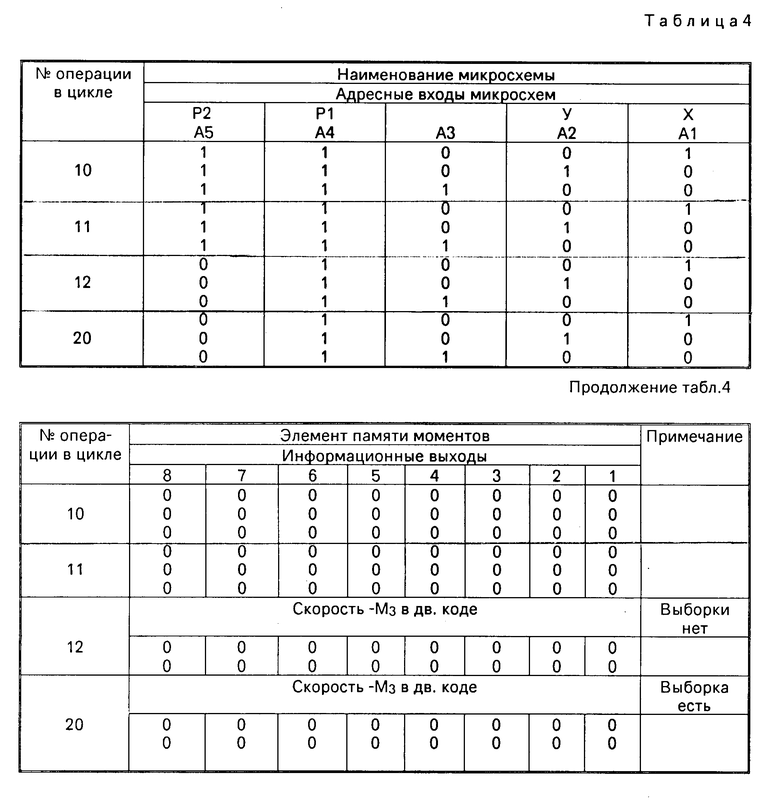
Программирование подрежима моментного режима производится в соответствии с табл. 1.
Для случая реализации элементов памяти на ИМС К155РЕ3 ниже приводятся фрагменты табл. 2, 3, 4 программирования для иллюстрации выполнения устройством основных технологических операций, описанных выше. Конкретные номера операций показаны условно в средней части поля состояний счетчика операций: N 10 - позиционирование по оси Y в исходную точку перед сборкой; N 11 - позиционирование по оси Z в исходную точку перед сборкой; N 12 - технологическая операция "нанизывание" с расстановкой деталей по позициям; N 20 - технологическая операция "нанизывание" с плотной упаковкой деталей.
Число разрядов двоичных кодов задания Пз и Мз в таблицах условно принято равным восьми. Практически в зависимости от технических характеристик конкретного сборочного устройства разрядность информационных слов может изменяться в пределах от восьми до двадцати.
Делитель 13 частоты (фиг. 7) может быть реализован на ИМС К155ИЕ7, второй коммутатор 18 - КР590КН3, первый коммутатор 16 - КР590КТ1, дешифратор 17 каналов - К155ИД4.
Изобретение разработано применительно к изделию 1344. Система вошла составной частью в опытный образец сборочного робота. Проведены испытания и ведется опытная эксплуатация. Система показала полную работоспособность, высокое быстродействие и надежность при выполнении сборочных операций, большую функциональную гибкость и универсальность.
Преимущества предложенной системы по сравнению с прототипом и аналогами заключается в повышении быстродействия и надежности при выполнении сборочных операций, в его универсальности за счет увеличения функциональной гибкости и в расширении области применения за счет снижения требований к точности изготовления собираемых деталей и точности предварительной установки и ориентирования, в увеличении общей скорости проведения сборочной операции и снижении развиваемых при этом усилий.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОМПЕНСАЦИИ РАЗБРОСА ПАРАМЕТРОВ ФОТОЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ МНОГОЭЛЕМЕНТНОГО ПРИЕМНИКА | 1992 |
|
RU2025905C1 |
| СПОСОБ КОМПЕНСАЦИИ РАЗБРОСА ПАРАМЕТРОВ ФОТОЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ ФОТОПРИЕМНОГО УСТРОЙСТВА | 1992 |
|
RU2105427C1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1989 |
|
SU1689983A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СОРТИРОВКИ ПЛОСКИХ ИЗДЕЛИЙ, ОТРЕЗАЕМЫХ ОТ ЗАГОТОВОК | 1990 |
|
RU2022668C1 |
| МИКРОПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1993 |
|
RU2079876C1 |
| УСТРОЙСТВО ДИСКРЕТНОГО КОНТРОЛЯ УРОВНЯ КУСКОВЫХ МАТЕРИАЛОВ В ПОДЗЕМНОЙ ЕМКОСТИ | 1989 |
|
RU2008626C1 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| Устройство для деления | 1990 |
|
SU1746378A1 |
| Устройство для формирования изображения на экране телевизионного приемника | 1987 |
|
SU1474727A1 |
| СИСТЕМА ИНДИКАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206872C2 |

Изобретение относится к системам программного управления сложными машинами и механизмами. Решается задача создания функционально гибких, быстродействующих и универсальных систем управления сборочными устройствами, обеспечивающими им высокую производительность при выполнении различных сборочных операций. Цель изобретения - повышение быстродействия и степени универсальности системы. Цель достигается реализацией нового алгоритма работы с использованием трехстепенного датчика усилий и датчиков абсолютных положений по каждой координате и управления приводами по принципу мультиплексирования в режиме моментного автоматического регулирования. Для этого в систему программного управления сборочным устройством введены соответствующим образом соединенные трехстепенной датчик усилий, дешифратор каналов, второй коммутатор, АЦП, второй сумматор, два буферных регистра, формирователь сигналов включения, формирователь импульсов записи, два формирователя импульсов выборки и задающий блок памяти, содержащий соответствующим образом соединенные два элемента ИЛИ, два одновибратора, триггер, два элемента задержки, счетчик операций, элементы памяти позиционного и моментного режимов, координат X, Y, Z и моментов и логические элементы блокировок. Изобретение может быть использовано в роботосроении при создании адаптивных роботов, в том числе выполняющих сборку деталей типа втулка-вал. 1 з.п. ф-лы, 8 ил.
| Устройство для управления сборочным роботом | 1980 |
|
SU1075233A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
