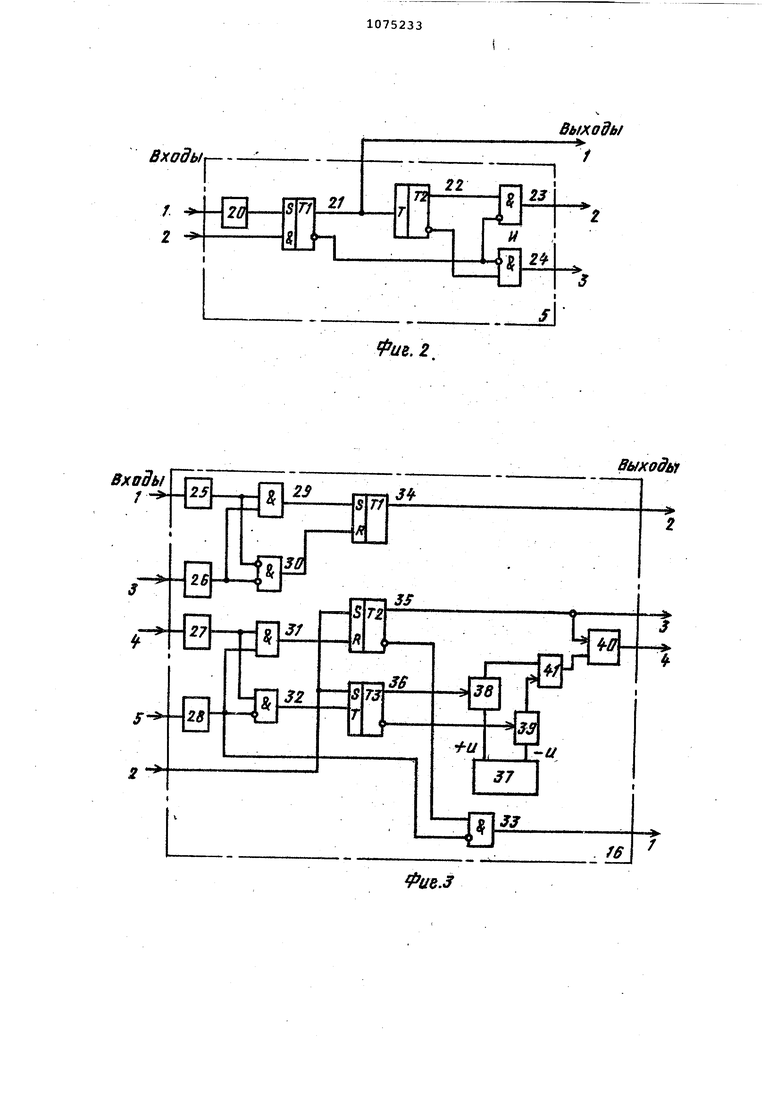
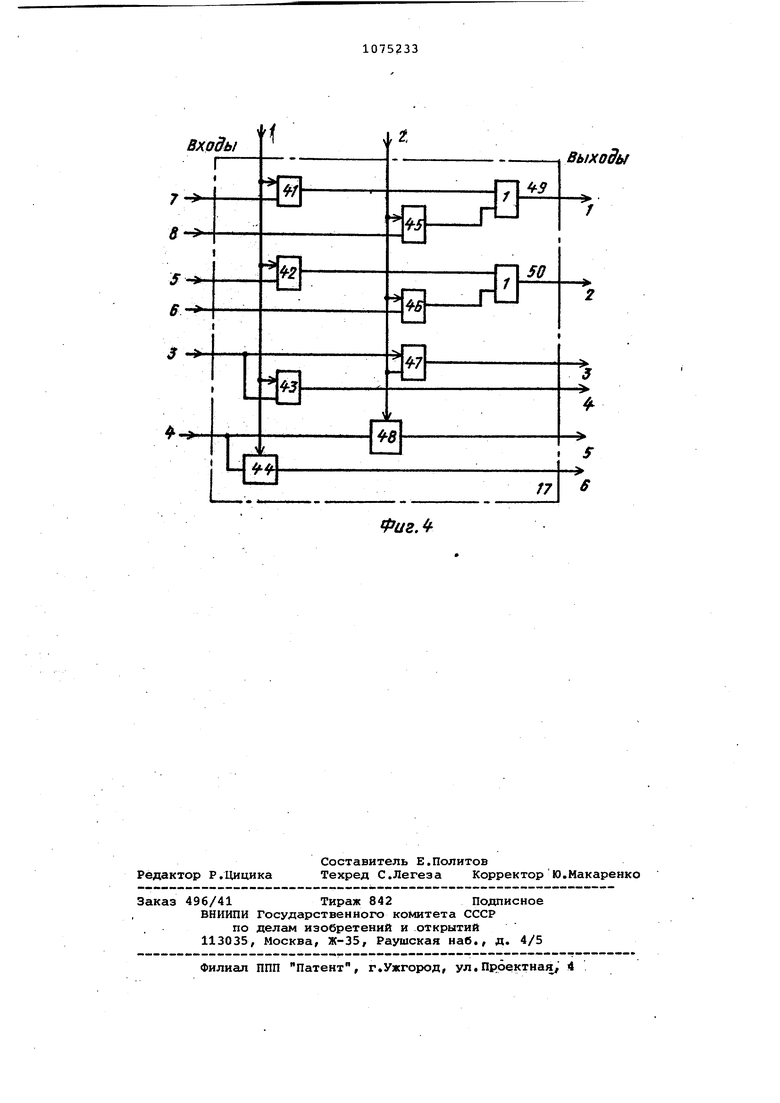
Изобретение относится к робототе нике и может быть использовано при создании промышленных роботов, осуществляющих сборку деталей типа вал втулка. Известно устройство для управления сборочным роботом, содержащее блок задания программы, блок сравнения, приводы и датчики обратной связи 1 j . Устройство имеет низкую производительность. Наиболее близким техническим ращ нием к изобретению является устройство, содержащее блок задания программь, и по каждой регулируемой коо динате X, Y HZ последовательно соединенные сумматор, регистр, цифро-аналоговый преобразователь, ключ усилитель и двигатель, связанный че рез редуктор с датчиком положения, выходом подключенного к первому вхо ду cyiymiaTopa, вторые входы каждого из которых соединены с соответствую щим выходом блока задания програмNttj 2 . Недостатком этого устройства является низкая надежность процесса сборки деталей типа вал - отверстие при отклонении осей сопрягаемых деталей от расчетных значений, что обусловлено нежесткостью конструкции промышленного робота,, люфтами упругостью механических передач, расположением датчиков на механизмах приводов перемещения, а не на схвате, а также неточностью базирования неподвижной детали и разбросо на изготовление отверстия относител но бааовой поверхности. Целью изобретения является повышение точности устройства. Поставленная цель достигается тем, что устройство содержит последовательно соединенные коммутатор, логический блок и блок переключения координат, а также по каждой ре гулируемой координате X,Ч и 7 да чик тока, вход которого подключен . к выходу усилителя,а выход - к второму входу усилителя, второй вход блока переключения координат соединен с выходом датчика тока координа ты 2 и вторым входом логического блока, первый выход - с вторым входом ключа координаты Z и с третьим входом логического блока, а второй и третий выходы - соответственно с первым и вторым входами- коммутатора третий и четвертый входы которого подключены к второму и третьему выходам логического блока соответственно, пятый и шестой входы - к выходам цифро-аналоговых преобразо вателей координат К и Y соответст венно/ и восьмой входы - к , выходу датчиков тока координат X и1 соответственно, второй и третий выходы - к вторым входам ключей координат X и Y соответственно, четвертый и пятый выходы - к третьим входам усилителей координат X и V соответственно, а шестой выход к четвертому входу логического блока, соединенного пятым входом с выходом цифро-аналогового преобразователя координаты 2 , :а четвертым выходом - с вторым входом цифро-аналоговых преобразователей координат X и Y . На фиг. 1 представлена функциональная схема устройства/ на фиг. 2блок-схема блока переключения координат; на фиг. 3 - блок-схема логического блока, на фиг. 4 - блоксхема коммутатора. Устройство (фиг. 1) содержит блок 1 задания программы., приводы 2, 3 и 4 координат X , Х и 2 соответственно, схват 5, сумматоры $, регистры 7, цифро-аналоговые преобразователи 8, ключи 9, усилители 10, двигатели 11, датчики.2, тока, редукторы 13, датчики 14 положения, блок 15 переключения координат, логический блок 16, коммутатор 17, собираемые детали 18 и 19; Блок переключения координат (фиг. 2) содержит первый пороговый элемент 20, первый и второй триггеры 21 и 22 соответственно, первый и второй элемент И 23 и 24 соответственно. Логический блок (фиг. 3) содержит второй, третий, четвертый и пятый порогойые элементы 25-28 со.ответственно; третий, четвертый, пятый, шестой и седьмой элементы И 2933 соответственно; третий, четвертый и пятый триггеры 34-36, источник 37 напряжения, второй, третий и четвертый ключи 38-40 соответственно, первый элемент ИЛИ 41. Коммутатор (фиг. 4) пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый и двенадцатый ключи 41-48 соответственно, второй и третий элементы ИЛИ 49 и 50 соот-/ ветственно.| Устройство работает .следующим Образом., В блоке 1 задания программы формируются сигналы задания по координатам X и Y центра втулки детали 19, расположенной на неподвижном основании. Приводы 3 и 4 отрабатывают заданные величины перемещений Далее в блоке 1 задается перемещение по оси 2 приводу 2 на величину гарантированного для сборки деталей 18 и 19 перемещения. Это значение вводится в сумматор 6 привода 2, и начинается его отработка. В случае, если фактические отклонения горизонтальных осей сопрягаемых дателей меньше величины гарантированного зазора, то детали собираются в результате поступательного перемещения детали 18, сообщаемого ей посредством привода 2. Если отклонение осей сопрягаемых деталей превышает величину гарантированного зазора, что обусловлено неточностью базирования детали 19, неточностью вывода детали 18, так как датчики перемещения расположены не на схвате робота, нежесткостью конструкции робота и другими факторами, то сборка не произойдет,
В этом случае приводы 2-4 управляются блоками 15-17 и работают поочередно, в следующей последовательности: привод 2 координаты контакта деталей 18 и 19, привод 3 кооррина ы X (или привод 4 координаты Y) ; привод 2, привод 4 .координаты-У или т рквод 3 координаты Х . Привод 2 коордкнаты 2 при перемещении при вода 2 и контакте деталей 18 и 19 в зоне фаски (фаска всегда превышает максимально возможное при сборке отклонение осей сопрягаемых деталей) срабатывает блок 15 переключения координат. Он размыкает ключ 9 в цепи ошибки привода 2 и дает расрешение на работу блока 16 для управления перемещениями приводов 3 и 4 координат X и Y и коммутатора 17 следующим образом. Когда происходит останов привода 2 при несобираемости деталей 18 и 19, возрастает ток якоря двигателя 11 привода 2, на выходе порогового/ элемента 20 формируется 1, и,срабатывает триггер 21, устанавливаясь в единичное состояние. В результате размыкается ключ 9 привода 2, подается сигнал разрешения на работу блока 16 за счет подачи сигнала на входы его триггеров 35 и 36, и изменяет свое состояние триггер 22 управления коммутатором 17. В зависимости от состояния триггера 22 коммутатор 17 подключает к блоку 16 блоки 8-12 привода 3 или 4 координаты X или Y Разрешение на привод.3 подается с прямого выхода , триггера 22 через элемент И 23,аразрешение на привод 4 с инверсного через элемент И 24, причем сигнал на коммутатор подается только при установке .триггера 21 начала работы в единичное состояние за счет его связи с элементами И 23 и 24. Пусть исходное положение деталей 18 и 19 таково, что после останова привода 2 дается разрешение на работу привода 3 координаты X .
БЛОК 16 управляет поочередно приводами 3 и 4 в указанной посде ювательности, обеспечивая совмещение осей сопрягаемых деталей 18 и 19. Для этого размыкается ключ 9 в канале ошибки, и через коммутатор 17 на вход усилителя 10 подается напряжение. Тем самым привод размыкается по положению, и работает в режиме регулятора скорости, перемещая вал в направлении свободного хода в зоне фаски втулки детали 19. Так как по окончании вывода вала
0 детали 18 на позицию сборки приводами 3 и 4 ошибки приводов равны нулю, то в результате его перемещения приводом 3 до другого крайнего положения код ошибки на выходе сум5 матора б и регистра 7 соответствует величине этого перемещения. Затем по сигналу блока 16 разрядная сетка цифро-аналогового преобразователя ё подключается к регистру 7
0 со сдвигом на один разряд вправо. Тем самым считываемая с регистра 7 величина перемещения делится на два, т.е. на выходе преобразователя 8 сигнал пропорционален половине вели5 чины перемещения. А это соответствует фактическому отклонению осей у сопрягаемых деталей. Далее замыкается ключ 9, привод 3 переводится в следящий режим и отрабатывает ошибку.
совмещая оси У деталей.
Блок 16 раб отает следующим образом. 1
При несобираемасти. деталей в результате перемещения привода 2 oci: Z
произойдет его останов. При этом, приводом 2 не отрабатывается заданная величина перемещения, следовательно ошибка больше статической и возрастает ток якоря двигателя 11.
В. результате на выходах пороговых элементов 25 и 26 формируется единичное состояние, на выходе элемента И 24 формируется 1, которая в свою очередь устанавливает триггер 34 управления цифро-аналоговыми преобразователями 8 в единичное состояние. Он подключает разрядную сетку цифро-аналоговых преобразователей 8 к регистру 7 со сдвигом на один разряд вправо. Следует отметить, что такое подключение преобразователей 8 и регистра 7 приводов 3 и 4 сохраняется до окончания процесса сборки. По окончании сборки, т.е при .отработке гарантированной
для сборки величины перемещения приводом 2, разжимается привод схвата 5, ошибка привода 2 становится меньше статической, и усилие привода 2 не превышает допустимого. При
этом на выходе элемента И 30 формируется .1,- устанавливающая тригер 34 в нулевое состояние. Управляющий сигнал снимается с преобразователей 8, их разрядные сетки подключаются к соответствующим разрядам регистров 7, По сигналу с триггера 21 начала работы блока 16 устанавливаются в единичное состояние его триггеры 35- 36. Триггер 35 управляет ключом 9 приводов 3 и 4, а триггер 36 организует подачу разнополярногого напряжения на вход уси. лителей 10 приводов 3 и 4. от источника 37 напряжения. При установке триггера 36 в единичное состояние на вход усилителя 10 подается положительное напряжение через элементы 38, 40 и. 41 и коммутатор 17. Привод 3 перемещает деталь 18 вправо. При контакте деталей возрастает ток якоря двигателя 11, и на выходе элемента И 27 формируется 1 и подается на один вход элемента И 31 . В результате перемещения и так как привод 3 разомкнут по положению, то величина ошибки на выходе преобразователя 8 больше статической и пропорциональна половине перемещения, т.е. на второй вход элемента И 31 тоже подается 1. При этом триггер 35 устанавливается в нулевое состояние, что вызывает замыкание ключа 9 и снятие положительного напряжения с входа усилителя 10. Привод 3 переводится в следящий режим и. отрабатывает половину перемещения вала детали 18 от одного до другого крайнего положения. В результате совмещаются оси Y сопрягаемых деталей. В исходном для работы положении привода 3 коорди-- наты X возможны два варианта расположения вертикальной оси деталий 18 в горизонтальной плоскости детали 19: в левой или правой полуплоскости.
Рассмотрим работу блока 16 в случае расположения детали 18 в правой полуплоскости. При срабатывании триггеров 35 и 36 на вход усилителя 10 подается положительное напряжение. Однако в этом случае перемещения вправо детали 18 не произойдет. При возрастании тока в цепи якоря двигателя 11 на прямом входе элемента И 32 .будет единичное состояние. На инверсном входе элемента И 32 нулевое состояние, так как ошибка не изменилась {не возросла) . При этом на выходе элемента И 32 формируется единичное состояние, вызывающее изменение состояния триггера 36, На «ход усилителя 10 подается отрицательное напряжение через ключи 39, 41 и 40 и коммутатор 17. В результате привод реверсируется. Далее блок 16 работает известным образом.
По окончании отработки величины ошибки, находящейся в цифро-ангшоговом преобразователе 8, на выходе элемента И 33 формируется единичное состояние, которое устанавливает
триггер 21 начало конца работы блока 15 в нулевое состояние. Работа блока 16 по управлению приводом 3 окончена. При этом снимается разрешающий сигнал с элементов И 23
5 и 24 на работу приводов 3 и 4, и замыкаются ключ 9 и цепи канала ошибки привода 2 по оси Z . Привод оси сообщает перемещение детали 18 на величину гарантированного для
0 сборки перемещения, заданную блоком 1. Если сборка не произошла, то при контакте деталей перемещение по координате прекращается, возрастает ток в цепи якоря двигате5 ля 11 привода 2. Блок 15, блок 16 и коммутатор 17 переключается на управление приводом 4. На входе триггера 21 появляется единичное состояние, что в свою очередь изменяет
Q состояние триггера 22. Если в его предыдущем состоянии давалось разрешение на управление приводом 3, то сейчас - на управление приводом 4. Управление им осуществляется аналое гично управлению приводом 3. Таким образом, триггер 22 после первого цикла работы по координате Z подключает сначала.привод 3 и 4, а после второго цикла работы по координате - привод 4 или привод 3, что опре0 деляется количеством циклов работы приводов 2-4 при сборке предыдущей пары деталей 18 и 19, а следовательно состоянием триггера 22. По окончании работы привода 4 совмещаются
5 оси сопрягаемых деталей 18 и 19, Блок 15 дает разрешение на работу привода 2 координаты . Когда величина перемещения привода 2 равна заданной, то дается команда приводу
0 схвата 5 на разжатие. Сборка закон;чена.
Применение изобретения за счет компенсации погрешностей исполнительного органа робота и установки сопря5 (Гаемых деталей повышает точность устройства.
иъ. 2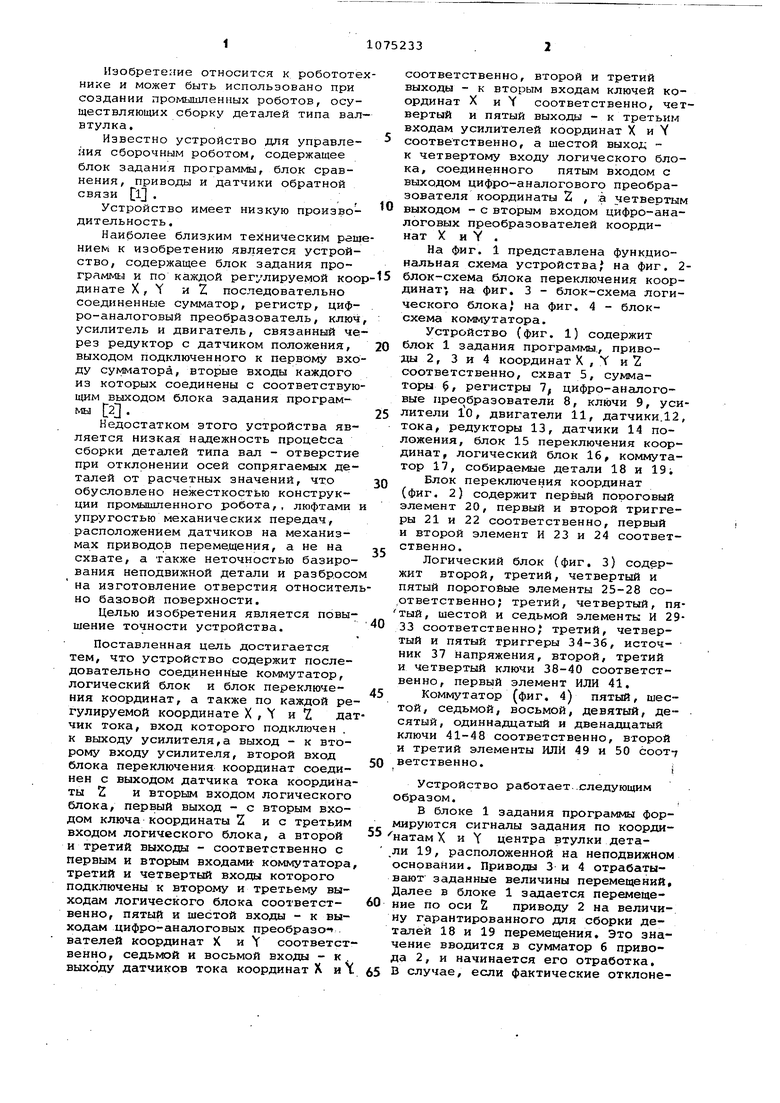
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления сборочным роботом | 1981 |
|
SU989534A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU875331A1 |
| Устройство для сварки давлением | 1987 |
|
SU1459864A1 |
| Устройство для определения координат центра яркости следа дефекта детали | 1985 |
|
SU1280506A1 |
| Многоканальное устройство для определения координат развивающейся трещины | 1976 |
|
SU574669A2 |
| Двухкоординатное устройство для программного управления | 1979 |
|
SU881673A2 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
| Устройство для управления сборочным роботом | 1985 |
|
SU1247839A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СБОРОЧНЕаМ РОБОТОМ, содержащее блок задания програм1«и и по каждой регулируемой координате 5 , Y и Z последовательно соединенные сумматор, регистр и цифро-аналоговый преобразователь, ключ, усилитель и двигатель, связанный через редуктор с датчиком положения, подключенный выходом к первому входу сумматора, вторые входы каждого из которых соединены с соответствующим выходом блока задания программы, отличающе ес я тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные коммутатор, логический блок и блок переключения координат, а также по , дои регулируемой координате X ,Y и 2 - датчик тока, вход которого подключен к выходу усилителя, а выход к второму входу усилителя, второй вход блока переключения координат соединен с выходом датчика тока координаты 2 и с вторым входом логического блока, первый выход с вторым входом ключа координаты Z и с третьим входом логического блока, а второй третий выходы - соотвехст:венно с первым и вторым входами коммутатора, третий и четвертый входы которого подключены к второму и третьему выходам логического блока соответственно, пятый и шестой входы - к выходам цифро-аналоговых преобразователей координат X и Y (Л соответственно, седьмой и восьмой входы - к выходу датчиков тока координат X и Y соответственно, второй и третий выходы - к вторым . входам ключей координат X и Ч соответственно, четвертый и пятый выходы - к третьим входам усилителей координат X и Ч соответственно, а шестой выход - к четвертому входу ло- i гического блока, соединенного пятым входом с выходом цифро-аналогового преобразователя координаты л , а четвертым выходом - с вторым входом Цифро-аналоговых преобразователея координат X и V .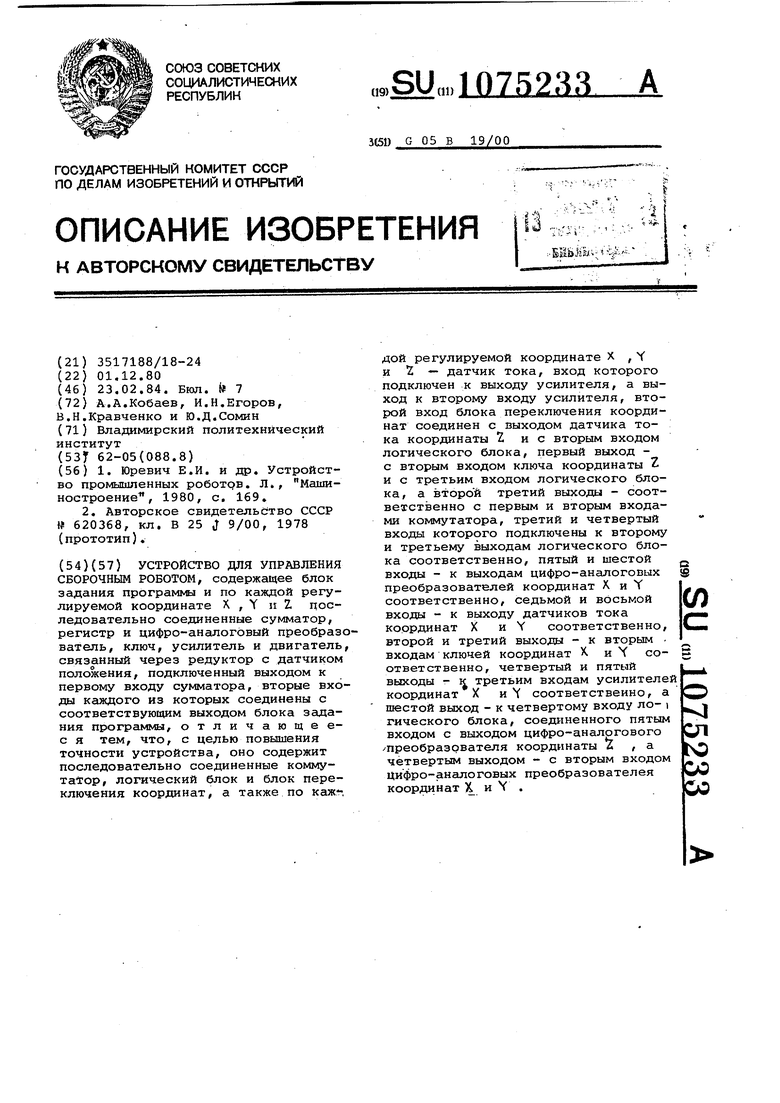
Выходы
Фив.З
Фиг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Юревич Е.И | |||
| и др | |||
| Устройство промышленных роботрв | |||
| Л., Машиностроение, 1980, с | |||
| Универсальный двойной гаечный ключ | 1920 |
|
SU169A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система контурного программного управления манипулятором | 1977 |
|
SU620368A1 |
