Изобретение относится к автоматизированному электроприводу, в частности к автоматизированной идентификации электропривода, и может найти применение в адаптивных и самонастраивающихся системах.
Целью изобретения является упрощение устройства.
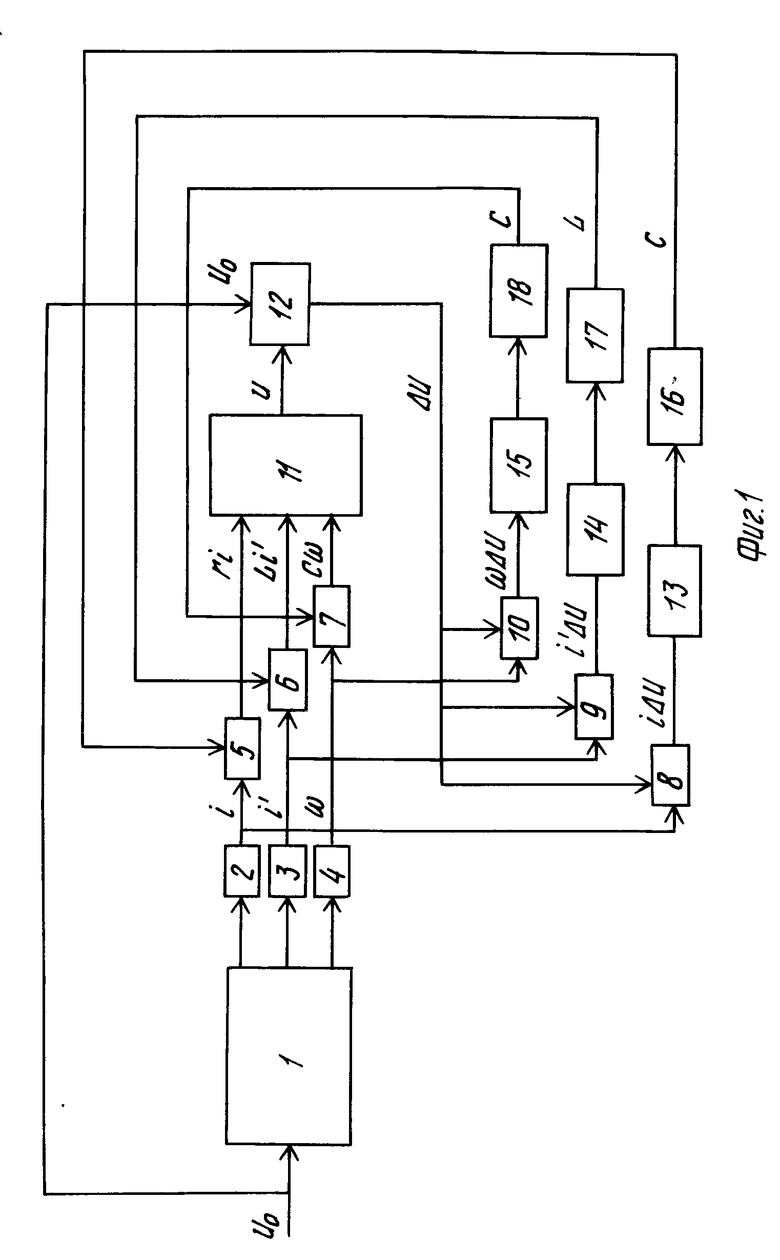
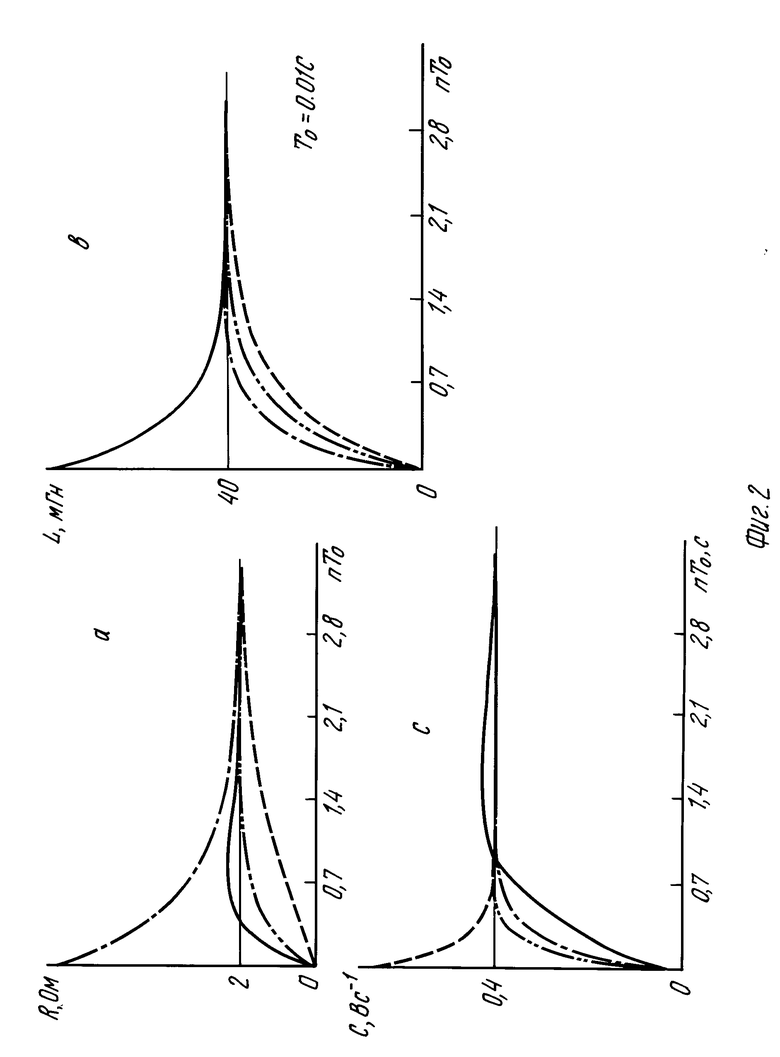
На фиг. 1 представлена функциональная схема устройства оценивания параметров электродвигателя; на фиг. 2 - графики переходных процессов оценивания параметров r (фиг. 2а), L (фиг. 2в) и ω (фиг. 2с) электродвигателя с параметрами rо = 20 м, Lо = 0,04 Гн, Cо = 0,4 Вс/рад.
Схема (фиг. 1) содержит электродвигатель 1, параметры которого подлежат оценке, датчики 2-4 соответственно тока, производной по времени от тока, частоты вращения выходного вала электродвигателя, первую 5, 6, 7 и вторую 8, 9, 10 группы умножителей, сумматор 11, формирователь 12 сигнала ошибки, масштабирующие устройства 13 - 15 и интеграторы 16 - 18. Число умножителей в каждой группе, число масштабирующих устройств и число интеграторов равно числу оцениваемых параметров и в рассматриваемом случае равно трем. Датчики 2 и 3 установлены в якорной цепи электродвигателя 1, датчик 4 установлен на выходном валу электродвигателя 1. Входное управляющее напряжение поступает одновременно на вход усилителя мощности (на чертеже не показан) электродвигателя 1 и на первый вход формирователя 12.
Выходы датчиков 2 - 4 соединены с первыми входами обеих групп умножителей 5, 6, 7 и 8, 9, 10 соответственно. Выходы умножителей 5 - 7 соединены соответственно с первым, вторым и третьим входами сумматора 11, выход которого соединен с вторым входом формирователя 12. Выход формирователя 12 соединен с вторыми входами умножителей 8 - 10 соответственно, выходы которых через масштабирующие устройства 13 - 15 соединены с входами интеграторов 16 - 18 соответственно. Выходы интеграторов соединены с вторыми входами умножителей 5 - 7 соответственно.
Устройство работает следующим образом.
Оценивают параметры двигателя постоянного тока с независимым возбуждением. Уравнение баланса напряжений имеет вид:
Uо = rо i + Lоi' + Cо ω, (1) где Uо - выходное управляющее напряжение;
ro - активное сопротивление обмотки якоря;
Lo - индуктивность обмотки якоря;
Cо - постоянная ЭДС;
i, i' - ток якоря и его производная по времени;
ω- частота вращения выходного вала электродвигателя.
Минимизируют функционал вида
V =  (Uo-U)2
(Uo-U)2
(2)
U = ri + Li' + C ω (3) где r, L, C - оценки параметров rо, Lо, Cо в текущий момент времени.
Уравнение (3) описывает математическую модель электродвигателя в текущий момент времени.
При переменных по времени величинах i, i', ω, Uо, которые являются известными коэффициентами при искомых величинах r, L, C, достижение минимума функционала (2) обеспечивается равенствами:






(4) где Kr, KL, Kc - масштабирующие коэффициенты;
T - постоянная времени сходимости процесса минимизации функционала (2).
Искомые оценки параметров r, L, C получают в результате интегрирования уравнения (4) при произвольных начальных условиях.
В процессе функционирования электродвигателя под действием сигнала Uо датчики 2 - 4 вырабатывают сигналы i, i' и ω, пропорциональные величинам тока в якорной обмотке, его производной и частоте вращения выходного вала соответственно.
Первая группа умножителей формирует произведения i ˙r, i˙ L, ω˙c, где r, L, C - значения оценок параметров выработанные в процессе работы устройства. В начальный момент времени tн величины rн могут быть установлены произвольными, в том числе равными нулю. На выходе сумматора 11 формируется сигнал U в соответствии с уравнением (3). Сигнал U поступает на второй вход формирователя 12, где он сравнивается с сигналом Uо. Сигнал ошибки (невязки) ΔU = U - Uо умножается на сигналы i, i', ω на умножителях 8 - 10. Полученные произведения Δ U ˙i,Δ U˙ i' и ΔU˙ω масштабируются устройствах 13 - 15 настроенными на коэффициенты Kr, KL и Kω соответственно, а затем интегрируются с постоянной времени T в интеграторах 16 - 18. На выходах интеграторов 16 - 18 формируются текущие значения оценок r, L, C, которые являются выходными сигналами устройства оценивания. Одновременно они поступают на вторые входы умножителей 6 и 7.
Использование данного устройства в автоматизированном электроприводе позволяет упростить вычислительную процедуру и алгоритм автоматизации и тем самым повысить ее эффективность, например, увеличить число оцениваемых параметров электропривода без заметного увеличения объема вычислений и усложнения устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2366070C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2400918C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2392731C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ И ПРОЦЕССОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2543495C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2426219C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2718708C1 |
| УСТРОЙСТВО СЛЕДЯЩЕГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ АВТОМОБИЛЯ | 1999 |
|
RU2161814C1 |
| РАДИОПЕЛЕНГАТОР ДЛЯ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2004 |
|
RU2276381C1 |
| СИСТЕМА СТЕРЕОФОНИЧЕСКОГО ВЕЩАНИЯ | 1992 |
|
RU2040859C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ РАЗБРОСА ПАРАМЕТРОВ ФОТОЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ МНОГОЭЛЕМЕНТНОГО ПРИЕМНИКА | 1992 |
|
RU2025905C1 |
Использование: может найти применение в адаптивных и самонастраивающихся системах. Сущность: устройство оценивания параметров электродвигателя содержит измерители тока, его производной и частоты вращения выходного вала, сумматор, первую и вторую группы умножителей, группу масштабирующих устройств, группу интеграторов, входы которых через масштабирующие устройства соединены с выходами второй группы умножителей. Формирователь сигнала ошибки включен между входным управляющим сигналом электродвигателя и выходным сигналом сумматора, выход которого соединен с вторыми входами второй группы умножителей, первые входы которых соединены с выходами измерителей тока, его производной и частоты вращения выходного вала электродвигателя соответственно. Выходы интеграторов соединены с вторыми входами первой группы умножителей, первые входы которых соединены с выходами вышеназванных измерителей, а выходы - с соответствующими входами сумматора, причем общее число входов сумматора равно числу оцениваемых параметров. В данном устройстве минимизируемый функционал формируют в виде квадрата разности входного управляющего напряжения и выходного сигнала математической модели электродвигателя в текущий момент времени. 2 ил.
УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ, содержащее датчики тока, его производной и частоты вращения выходного вала, предназначенные для соединения с электродвигателем, сумматор, первую и вторую группы умножителей, группу из трех масштабирующих блоков и группу из трех интеграторов, входы которых через масштабирующие блоки соединены с выходами второй группы умножителей, блок задания электродвигателя, отличающееся тем, что, с целью упрощения устройства, введен формирователь сигнала ошибки, включенный между выходом блока задания электродвигателя и выходом сумматора, выход которого соединен с вторыми входами второй группы умножителей, первые входы которых соединены с выходами датчиков тока, его производной и частоты вращения соответственно, выходы интеграторов соединены с вторыми входами первой группы умножителей, первые входы которой соединены с выходами датчиков тока, его производной и частоты вращения, а выходы - с первым, вторым и третьим входами сумматора.
| Топчеев Ю.И | |||
| Атлас для проектирования системы автоматического регулирования | |||
| М.:Машиностроение, 1989, с.706-707. |
