Изобретение относится к автоматизированному электроприводу и может быть использовано для построения адаптивных систем управления двигателями постоянного тока.
Известно устройство для определения параметров электродвигателя постоянного тока [RU 2030088 C1, МПК6 H02P5/06, опубл. 27.02.1995], выбранное в качестве прототипа, содержащее датчики тока, его производной и частоты вращения выходного вала, сумматор, первую и вторую группы умножителей, группу из трех масштабирующих блоков, группу из трех интеграторов, входы которых через масштабирующие блоки соединены с выходами второй группы умножителей, блок задания электродвигателя. Формирователь сигнала ошибки включен между выходом блока задания электродвигателя и выходом сумматора, выход которого соединен с вторыми входами второй группы умножителей, первые входы которых соединены с выходами датчиков тока, его производной и частоты вращения выходного вала электродвигателя соответственно. Выходы интеграторов соединены с вторыми входами первой группы умножителей, первые входы которых соединены с выходами датчиков тока, его производной и частоты вращения, а выходы - с первым, вторым и третьим входами сумматора.
С помощью этого устройства можно определить только активное сопротивление якорной обмотки, индуктивность якорной обмотки, коэффициент, характеризующий связь между током и электромагнитным моментом электродвигателя постоянного тока (постоянная ЭДС), но нельзя определить эквивалентный момент инерции, приведённый к валу электродвигателя и момент сопротивления нагрузки на валу электродвигателя постоянного тока в режиме реального времени.
Техническим результатом изобретения является создание устройства для определения параметров электродвигателя постоянного тока.
Предложенное устройство для определения параметров электродвигателя постоянного тока, также как в прототипе, содержит датчик тока, подключенный к якорной обмотке и датчик частоты вращения выходного вала, установленный на выходном валу электродвигателя.
Согласно изобретению датчик напряжения подключен к якорной обмотке электродвигателя, а выходы датчиков тока, напряжения и частоты вращения выходного вала соединены с блоком памяти, с блоком дифференцирования и с первым блоком временной задержки, к которому подключен второй блок временной задежки. Блок дифференцирования связан с первым блоком блоком временной задержки и c блоком памяти, который соединен с первым и вторым блоками временной задежки, с блоком определения электрических параметров и с блоком определения электромеханических параметров. Управляющие входы блока определения электрических параметров и блока памяти соединены с системой управления электродвигателем. Блок определения электрических параметров соединен с блоком определения электромеханических параметров. Блок определения электрических параметров и блок определения электромеханических параметров подключены к ЭВМ.
По сравнению с прототипом предложенное устройство позволяет оценивать большее число параметров элктродвигателя постоянного тока: определить в режиме реального времени не только активное сопротивление якорной обмотки, индуктивность якорной обмотки, коэффициент, характеризующий связь между током и электромагнитным моментом электродвигателя постоянного тока, но и эквивалентный момент инерции, приведённый к валу электродвигателя и момент сопротивления нагрузки на валу электродвигателя постоянного тока.
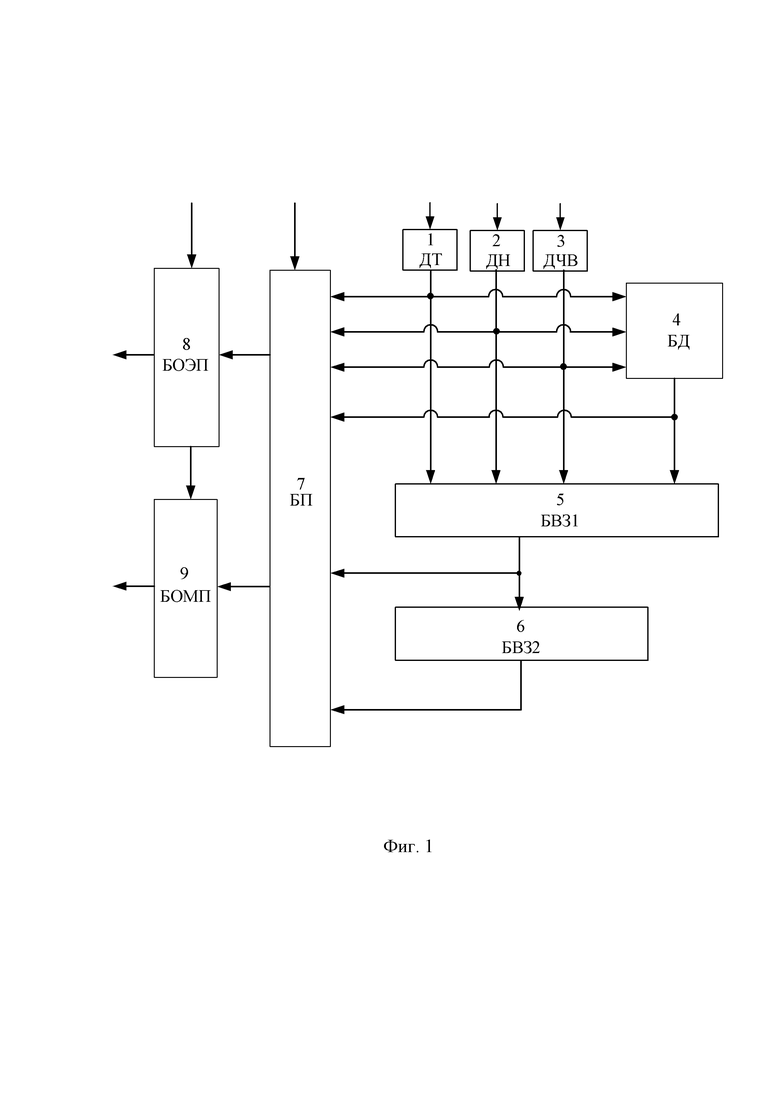
На фиг. 1 приведена схема устройства для определения параметров электродвигателя постоянного тока.
Устройство для определения параметров электродвигателя постоянного тока содержит датчик тока 1 (ДТ) и датчик напряжения 2 (ДН), подключенные к якорной обмотке электродвигателя постонного тока, а также датчик частоты вращения выходного вала 3 (ДЧВ), который установлен на валу электродвигателя. К датчику тока 1 (ДТ), датчику напряжения 2 (ДН) и датчику частоты вращения выходного вала 3 (ДЧВ) подключен блок дифференцирования 4 (БД). К датчику тока 1 (ДТ), датчику напряжения 2 (ДН), датчику частоты вращения выходного вала 3 (ДЧВ) и к блоку дифференцирования 4 (БД) последовательно подключены первый блок временной задержки 5 (БВЗ1), второй блок временной задежки 6 (БВЗ2), блок памяти 7 (БП), блок определения электрических параметров 8 (БОЭП). Блок памяти 7 (БП) соединен с датчиком тока 1 (ДТ), датчиком напряжения 2 (ДН), датчиком частоты вращения выходного вала 3 (ДЧВ), блоком дифференцирования 4 (БД), первым блоком временной задержки 5 (БВЗ1) и вторым блоком временной задержки 6 (БВЗ2). Блок определения электромеханических параметров 9 (БОМП) соединен с блоком памяти 7 (БП) и блоком определения электрических параметров 8 (БОЭП). Управляющие входы блока памяти 7 (БП) и блока определения электрических параметров 8 (БОЭП) соединены с системой управления электродвигателем постоянного тока (на фиг. 1 не показана). Блок определения электрических параметров 8 (БОЭП) и блок определения электромеханических параметров 9 (БОМП) связан с ЭВМ (на фиг. 1 не показано).
В качестве датчика тока 1 (ДТ) использован промышленный прибор КЭИ-0,1. В качестве датчика напряжения 2 (ДН) использован датчик напряжения LEM. В качестве датчика частоты вращения выходного вала 3 (ДЧВ) может быть использован тахогенератор. Блок дифференцирования 4 (БД), первый блок временной задержки 5 (БВЗ1), второй блок временной задержки 6 (БВЗ2), блок памяти 7 (БП), блок определения электрических параметров 8 (БОЭП), блок определения электромеханических параметров 9 (БОМП) и система управления электродвигателем постоянного тока выполнены на базе микроконтроллера типа TMS320C28346 фирмы Texas Instruments.
В течение пуска и работы электродвигателя постоянного тока с выходов датчиков тока 1 (ДТ), напряжения 2 (ДН) и датчика частоты вращения выходного вала 3 (ДЧВ) измеренные мгновенные величины тока и напряжения в якорной обмотке и частота вращения выходного вала поступают в блок дифференцирования 4 (БД), где получают производные тока и напряжения в якорной обмотке и частоты вращения выходного вала. Сигналы с выходов датчика тока 1 (ДТ), напряжения 2 (ДН), датчика частоты вращения выходного вала 3 (ДЧВ) и блока дифференцирования 4 (БД) поступают в первый блок временной задержки 5 (БВЗ1), где выполняют первую временную задержку мгновенных величин и производных тока и напряжения в якорной обмотке и частоты вращения выходного вала, например, на 300∙10-6 секунд. Сигналы с первого блока временной задержки 5 (БВЗ1), поступают во второй блок временной задержки 6 (БВЗ2), где выполняют вторую временную задержку на 300∙10-6 секунд и получают текущие, задержанные единожды и дважды, значения мгновенных величин и производных тока и напряжения в якорной обмотке и частоты вращения выходного вала. Полученные текущие и задержанные единожды и дважды мгновенные величины и производные тока в якорной обмотке I, Iz1, Iz2, 




В момент включения в сеть электродвигателя постоянного тока система управления подает на управляющий вход блока памяти 7 (БП) сигнал о пуске электродвигателя постоянного тока. По этому сигналу в течении пуска и работы электродвигателя постоянного тока с временной задержкой начинают запись величин тока, напряжения и частоты вращения вала электродвигателя постоянного тока. Одновременно в момент включения в сеть электродвигателя постоянного тока система управления подает сигнал на управляющие входы блока определения электрических параметров 8 (БОЭП). По этому сигналу начинается поступление сигнала из блока памяти 7 (БП) в блок определения электрических параметров 8 (БОЭП), где происходит определение активного сопротивления якорной обмотки, индуктивности якорной обмотки, коэффициента, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока в режиме реального времени следующим образом:



где R – активное сопротивление якорной обмотки, Ом;
L – индуктивность якорной обмотки, Гн;
с – коэффициент, характеризующий связь между током и электромагнитным моментом электродвигателя постоянного тока, В·с/рад;
U, Uz1, Uz2 – мгновенные величины напряжения в якорной обмотке без задержки, единожды и дважды задерженные, соответственно, В;
I, Iz1, Iz2 – мгновенные величины тока без задержки, единожды и дважды задерженные, соответственно, А;
ω, ωz1, ωz2 – мгновенные величины частоты вращения выходного вала без задержки, единожды и дважды задерженные, соответственно, рад/с;
Полученное значение коэффициента c, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока, из блока определения электрических параметров 8 (БОЭП) и запомненные мгновенные величины и производные тока и напряжения в якорной обмотке, а также частоты вращения выходного вала из блока памяти 7 (БП) поступают в блок определения электромеханических параметров 9 (БОМП), где происходит определение эквивалентного момента инерции, приведённого к валу электродвигателя и момента сопротивления нагрузки на валу электродвигателя постоянного тока в режиме реального времени следующим образом:
где J – эквивалентный момент инерции, приведённый к валу электродвигателя, кг·м2;
Мс – момент сопротивления нагрузки на валу электродвигателя постоянного тока, Н·м;
Полученные значения параметров электродвигателя постоянного тока из блока определения электрических параметров 8 (БОЭП) и блока определения электромеханических параметров 9 (БОМП) передают на ЭВМ.
Таким образом заявляемое устройство позволяет определять параметры электродвигателя постоянного тока в режиме реального времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2022 |
|
RU2789019C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2705939C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2564692C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2570363C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2024 |
|
RU2832962C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2024 |
|
RU2825800C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2822608C1 |
| Датчик магнитного поля с частотным выходом на основе магнитотранзистора | 2023 |
|
RU2815185C1 |
| Стабилизированный вентильный электропривод | 1987 |
|
SU1467726A1 |
Изобретение относится к области автоматизированных электроприводов и может быть использовано для построения адаптивных систем управления двигателями постоянного тока. Техническим результатом является определение в режиме реального времени ряда параметров электродвигателя. Устройство для определения параметров электродвигателя постоянного тока содержит датчик тока и датчик напряжения, которые подключены к якорной обмотке электродвигателя, а также датчик частоты вращения выходного вала, установленный на выходном валу электродвигателя, блок памяти, блок дифференцирования, первый и второй блоки временной задержки, блок определения электрических параметров и блок определения электромеханических параметров, подключенные к ЭВМ. Управляющие входы блока определения электрических параметров и блока памяти соединены с системой управления электродвигателем. 1 ил.
Устройство для определения параметров электродвигателя постоянного тока, содержащее датчик тока, подключенный к якорной обмотке, и датчик частоты вращения выходного вала, установленный на выходном валу электродвигателя, отличающееся тем, что датчик напряжения подключен к якорной обмотке электродвигателя, выходы датчиков тока, напряжения и частоты вращения выходного вала соединены с блоком памяти, с блоком дифференцирования и с первым блоком временной задержки, к которому подключен второй блок временной задежки, при этом блок дифференцирования связан с первым блоком временной задержки и c блоком памяти, который соединен с первым и вторым блоками временной задежки, с блоком определения электрических параметров и с блоком определения электромеханических параметров, а управляющие входы блока определения электрических параметров и блока памяти соединены с системой управления электродвигателем, блок определения электрических параметров соединен с блоком определения электромеханических параметров, блок определения электрических параметров и блок определения электромеханических параметров подключены к ЭВМ.
| Устройство для обработки жидкого металла | 1959 |
|
SU123541A1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 1991 |
|
RU2030088C1 |
| Устройство для формования сердечников напорных железобетонных труб | 1962 |
|
SU151954A1 |
| CN 102193066 A, 21.09.2011. | |||

