Изобретение относится к автоматизированному асинхронному электроприводу, в частности к автоматизированной идентификации параметров асинхронного электропривода, и может найти применение в адаптивных и самонастраивающихся системах.
Известно устройство оценивания параметров объекта управления, содержащее два блока интеграторов и блок решения системы линейных неоднородных алгебраических уравнений (Методы классической и современной теории автоматического управления. Т.2. - М.: Изд-во МГТУ им. Н.Э.Баумана, 2004. - Стр.331) - [1].
Недостатком устройства является его сложность, связанная с большим числом интеграторов и с необходимостью решения системы уравнений, которая может быть плохо обусловлена.
Прототипом является устройство оценивания параметров электродвигателя (Афанасьев А.Ю., Тарасова И.Т. Устройство оценивания параметров электродвигателя, патент РФ 2030088, МПК6 H02P 5/06, опубл. 27.02.95. Бюл. № 6), содержащее датчики тока, его производной и частоты вращения выходного вала, сумматор, формирователь сигнала ошибки по напряжению, первую и вторую группы по три умножителя, три масштабирующих устройства, три интегратора, входы которых через масштабирующие устройства соединены с выходами второй группы умножителей. Входы формирователя сигнала ошибки по напряжению подключены к входу электродвигателя и выходу сумматора, а выход соединен со вторыми входами второй группы умножителей, первые входы которых соединены с выходами датчиков тока, его производной и частоты вращения вала электродвигателя соответственно, входы двух первых датчиков соединены с якорной цепью электродвигателя, а третий датчик механически соединен с валом электродвигателя. Выходы интеграторов соединены со вторыми входами первой группы умножителей, первые входы которых соединены с выходами вышеназванных датчиков, а выходы - с соответствующими входами сумматора.
Недостатком данного устройства является то, что оно дает оценку недостаточного числа параметров, не позволяет оценивать величины, не подлежащие непосредственному измерению, которые необходимы для эффективного управления электроприводом, и не работает с асинхронным электродвигателем.
Задачей изобретения является разработка устройства оценивания параметров асинхронного двигателя, обладающего увеличенным числом оцениваемых параметров электродвигателя и оценкой величин, не подлежащих непосредственному измерению, и работающего с асинхронными двигателями.
Поставленная задача осуществляется тем, что в устройстве оценивания параметров асинхронного двигателя, содержащем электромеханический преобразователь, подсоединенный к нему блок датчиков, содержащий датчик частоты вращения, согласно изобретению электромеханическим преобразователем является трехфазный асинхронный двигатель, а устройство оценивания параметров асинхронного двигателя дополнительно содержит блок вычисления оценки параметров и величин, не подлежащих непосредственному измерению, трехфазного асинхронного двигателя, включающий в себя восемнадцатый - тридцать восьмой сумматоры, тридцать девятый - восемьдесят восьмой умножители, восемьдесят девятый - девяностый делители, девяносто первый - девяносто восьмой интеграторы, дополнительно устройство содержит блок преобразователя координат, который содержит устройства дифференцирования пятнадцать и шестнадцать, интегратор двенадцать, сумматор семнадцать, преобразователь фазных напряжений статора тринадцать, преобразователь фазных токов статора шестнадцать, на первый вход семнадцатого сумматора и вход двенадцатого интегратора, выход которого соединен со вторыми входами преобразователя фазных напряжений статора тринадцать и преобразователя фазных токов статора четырнадцать, подается внешний сигнал скорости вращения системы ортогональных координат, этот сигнал также подается на первые входы пятьдесят шестого и семьдесят пятого умножителей и на второй вход семьдесят четвертого умножителя, а блок датчиков содержит датчик углового ускорения одиннадцать, установленный на валу асинхронного двигателя, выход которого соединен со вторыми входами восемьдесят четвертого, восемьдесят пятого умножителей, датчик частоты вращения десять, установленный на валу асинхронного двигателя, выход которого соединен со вторыми входами семьдесят второго, шестьдесят шестого, семьдесят шестого умножителей с первыми входами семьдесят седьмого, сорок восьмого умножителей и со вторым входом семнадцатого сумматора, выход которого соединен с первым входом сорок пятого умножителя и с первыми входами сорок шестого и сорок седьмого умножителей, выходы которых соединены со вторыми входами двадцать пятого и двадцать седьмого сумматоров соответственно, седьмой, восьмой, девятый датчики фазных токов статора, выходы которых соединены с первым, третьим, четвертым входом преобразователя фазных токов статора четырнадцать, первый выход которого соединен с первыми входами тридцать девятого, восьмидесятого умножителей, со вторым входом шестьдесят второго умножителя, с первыми входами сорокового, шестьдесят первого, пятьдесят восьмого умножителей, выходы которых соединены с первыми входами двадцать шестого, двадцать второго, третьим входом двадцать третьего сумматоров, со вторым входом семьдесят пятого умножителя, выход которого соединен с первым входом тридцать пятого сумматора, с первым входом пятнадцатого устройства дифференцирования, выход которого соединен с первыми входами сорок второго умножителя и тридцать четвертого сумматора, выходы которых соединены с третьим входом двадцать пятого сумматора и со вторым входом шестьдесят третьего умножителя соответственно и с первым входом сорок первого умножителя, второй выход преобразователя фазных токов статора соединен с первыми входами сорок третьего, сорок четвертого, семьдесят четвертого умножителей, выходы которых соединены со вторыми входами двадцать второго, двадцать четвертого, тридцать четвертого сумматоров, с первым входом пятьдесят пятого, пятьдесят седьмого, восемьдесят первого умножителя, со вторым входом шестьдесят восьмого умножителя и с первым входом шестнадцатого устройства дифференцирования, выход которого соединен с первым входом пятьдесят второго умножителя, выход которого соединен с третьим входом двадцать седьмого сумматора, с первым входом пятьдесят первого умножителя, выход которого соединен с третьим входом двадцать второго сумматора, выход которого соединен со вторым входом двадцать третьего сумматора, и со вторым входом тридцать пятого сумматора, выход которого соединен с первым входом шестьдесят девятого умножителя, четвертый, пятый, шестой датчики фазных напряжений статора, входы которых подсоединены к фазным обмоткам статора, а выходы подсоединены к первому, третьему, четвертому входам преобразователя фазных напряжений статора тринадцать, второй выход которого соединен с первым входом двадцать третьего сумматора, выход которого соединен с первыми входами шестьдесят восьмого, семидесятого, семьдесят второго умножителей и вторыми входами шестьдесят девятого, семьдесят первого, семьдесят третьего умножителей, а его первый выход соединен с первым входом двадцатого сумматора, второй вход которого соединен с выходом тридцать девятого умножителя, третий вход соединен с выходом сорок первого умножителя, четвертый вход соединен с выходом пятьдесят пятого умножителя, пятый вход соединен с выходом пятьдесят седьмого умножителя, а его выход соединен с первым входом двадцать первого сумматора, второй вход которого соединен с выходом сорок девятого умножителя, третий вход соединен с выходом пятьдесят девятого умножителя, а выход соединен с первым входом шестьдесят второго - шестьдесят шестого умножителей и вторым входом шестьдесят седьмого умножителя, выходы которых соединены с первым входом двадцать восьмого сумматора, второй вход которого соединен с выходом шестьдесят восьмого умножителя, а выход соединен с входом девяносто первого интегратора, выход которого соединен со вторыми входами тридцать девятого и сорок третьего умножителей, с первым входом двадцать девятого сумматора, второй вход которого соединен с выходом шестьдесят девятого умножителя, а выход соединен с входом девяносто второго интегратора, выход которого соединен с первым входом восемнадцатого сумматора, выход которого соединен со вторыми входами сорок первого и пятьдесят первого умножителей, вторым входом пятьдесят шестого умножителя, выход которого соединен со вторыми входами пятьдесят седьмого, пятьдесят восьмого умножителей, с первым входом восемьдесят девятого делителя, выход которого соединен со вторыми входами пятьдесят четвертого, пятидесятого, семьдесят восьмого умножителей и первым входом семьдесят девятого умножителя, с первым входом девяностого делителя, выход которого соединен со вторыми входами восемьдесят шестого, восемьдесят седьмого умножителей, с первым входом восемьдесят восьмого умножителя и со вторыми входами сорок второго, пятьдесят второго сорок четвертого и сорокового умножителей, с первым входом тридцатого сумматора, второй вход которого соединен с выходом восемьдесят второго умножителя, третий вход соединен с выходом семьдесят первого умножителя, а его выход соединен с входом девяносто четвертого интегратора, выход которого соединен со вторым входом девяностого делителя, со вторым входом восемьдесят восьмого умножителя, выход которого соединен со вторым входом восемнадцатого сумматора и вторым входом сорок пятого умножителя, выход которого соединен со вторыми входами пятьдесят пятого и шестьдесят первого умножителей, со вторым входом сорок восьмого умножителя, выход которого соединен со вторыми входами пятьдесят девятого и шестидесятого умножителей, с третьими входами семьдесят второго и шестьдесят шестого умножителей, со вторым входом восемьдесят третьего умножителя, выход которого соединен с первым входом тридцать восьмого сумматора, выход которого соединен со вторым входом восемьдесят второго умножителя, с входом девяносто восьмого интегратора, выход которого соединен с третьим входом тридцать восьмого сумматора и с первым входом восемьдесят пятого умножителя, выход которого соединен с входом девяносто седьмого интегратора, выход которого соединен с первым входом восемьдесят четвертого умножителя, со вторым входом тридцать первого сумматора, первый вход которого соединен с выходом двадцать пятого сумматора, третий вход соединен с выходом семьдесят второго умножителя, а его выход соединен с входом девяносто пятого интегратора, выход которого соединен со вторым входом семьдесят седьмого умножителя, выход которого соединен с первым входом тридцать седьмого сумматора, выход которого соединен с первым входом семьдесят первого умножителя, с первым входом семьдесят восьмого умножителя, выход которого соединен с первым входом тридцать шестого сумматора, со вторым входом шестьдесят седьмого умножителя, выход которого соединен со вторым входом тридцать третьего сумматора, со вторым входом восемьдесят первого умножителя, выход которого соединен с первым входом девятнадцатого сумматора, с первым входом шестидесятого умножителя, выход которого соединен с четвертым входом двадцать второго сумматора, с первым входом двадцать шестого сумматора, выход которого соединен со вторым входом сорок седьмого умножителя, с первым входом пятидесятого умножителя, выход которого соединен с первым входом двадцать пятого сумматора, и с первым входом сорок девятого умножителя, с третьим входом тридцать второго сумматора, первый вход которого соединен с выходом двадцать седьмого сумматора, второй вход соединен с выходом семьдесят третьего умножителя, а его выход соединен с входом девяносто шестого интегратора, выход которого соединен со вторым входом семьдесят девятого умножителя, выход которого соединен со вторым входом тридцать седьмого сумматора, выход которого соединен с первым входом семьдесят первого умножителя, с первым входом семьдесят шестого умножителя, выход которого соединен со вторым входом тридцать шестого сумматора, выход которого соединен со вторым входом шестьдесят четвертого умножителя, с первым входом восьмидесятого умножителя, выход которого соединен со вторым входом девятнадцатого сумматора, выход которого соединен с первыми входами восемьдесят второго и восемьдесят третьего умножителей, с первым входом двадцать четвертого сумматора, выход которого соединен со вторым входом сорок шестого умножителя, с первым входом пятьдесят четвертого умножителя, выход которого соединен с первым входом двадцать седьмого сумматора, с первыми входами пятьдесят третьего - пятьдесят девятого умножителей, и со вторым входом семидесятого умножителя, со вторым входом тридцать третьего сумматора, первый вход которого соединен с выходом семидесятого умножителя, а его выход соединен с первым входом восемьдесят шестого умножителя, выход которого соединен с входом девяносто третьего интегратора, выход которого соединен со вторым входом восемьдесят девятого делителя, с первым входом восемьдесят седьмого умножителя, выход которого соединен со вторыми входами сорок девятого, шестьдесят пятого умножителей, с первым входом семьдесят третьего умножителя, вторым входом пятьдесят третьего умножителя, выход которого соединен с пятым входом двадцать второго сумматора соответственно.
Сущность заявленного изобретения поясняется на фиг.1-11.
Фиг.1 - функциональная схема устройства оценивания параметров асинхронного двигателя.
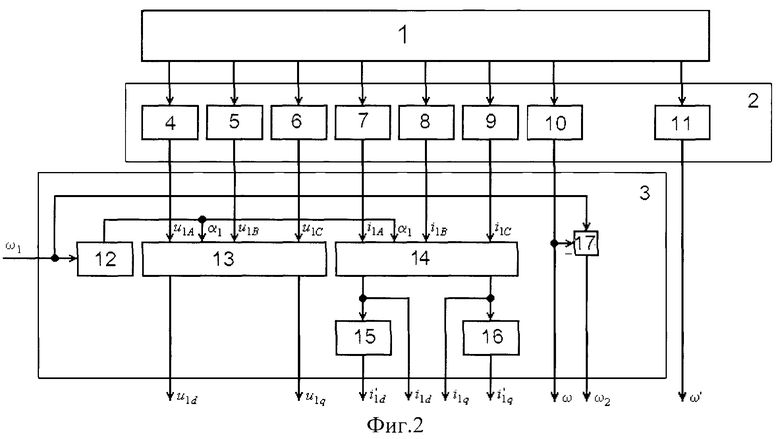
Фиг.2 - функциональная схема блока датчиков и преобразователя координат.
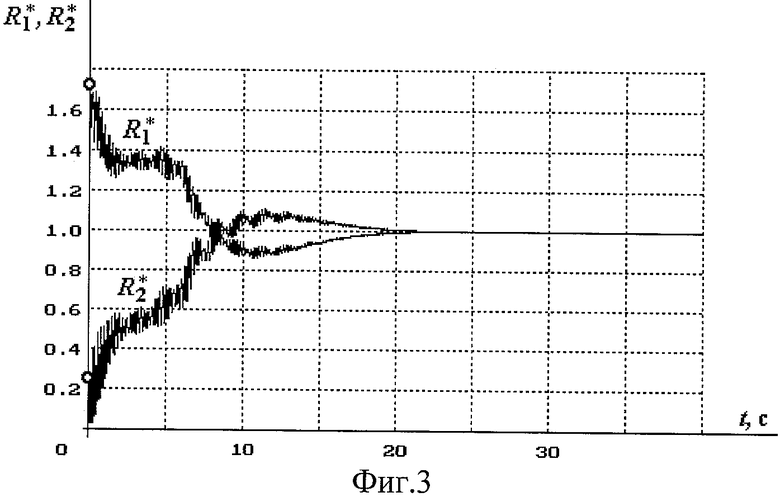
Фиг.3 - процесс оценивания активные сопротивления фаз статора и ротора при начальном отклонении всех параметров на 75%.
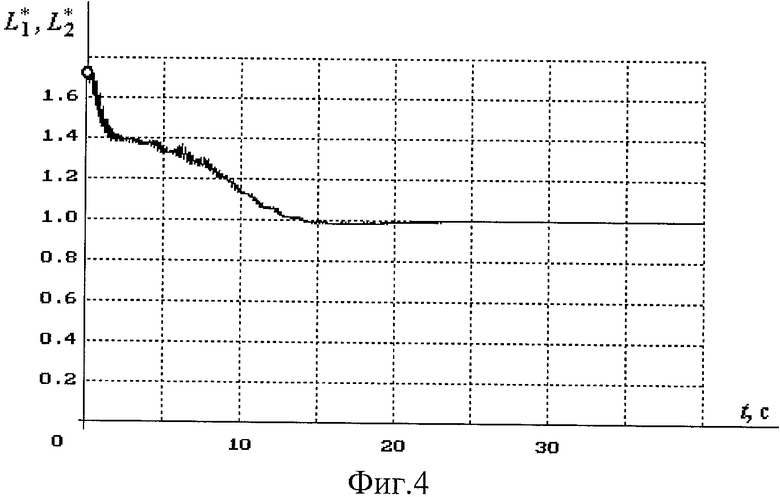
Фиг.4 - процесс оценивания индуктивности фаз статора и ротора при начальном отклонении всех параметров на 75%.
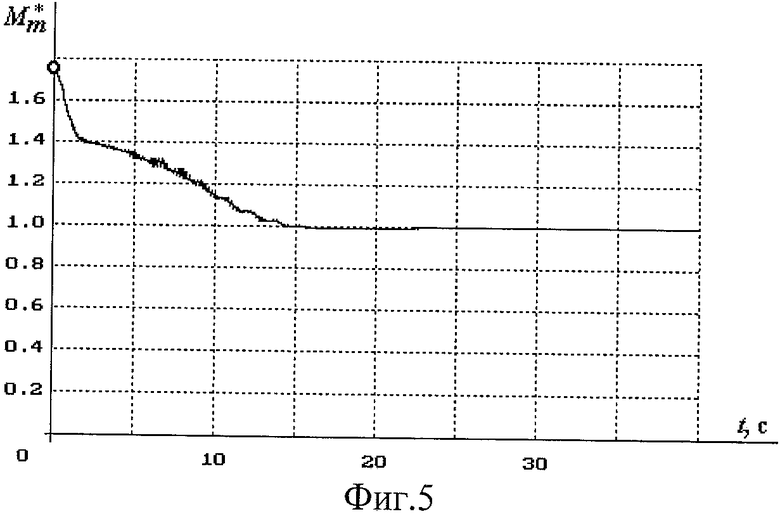
Фиг.5 - процесс оценивания взаимная индуктивность при начальном отклонении всех параметров на 75%.
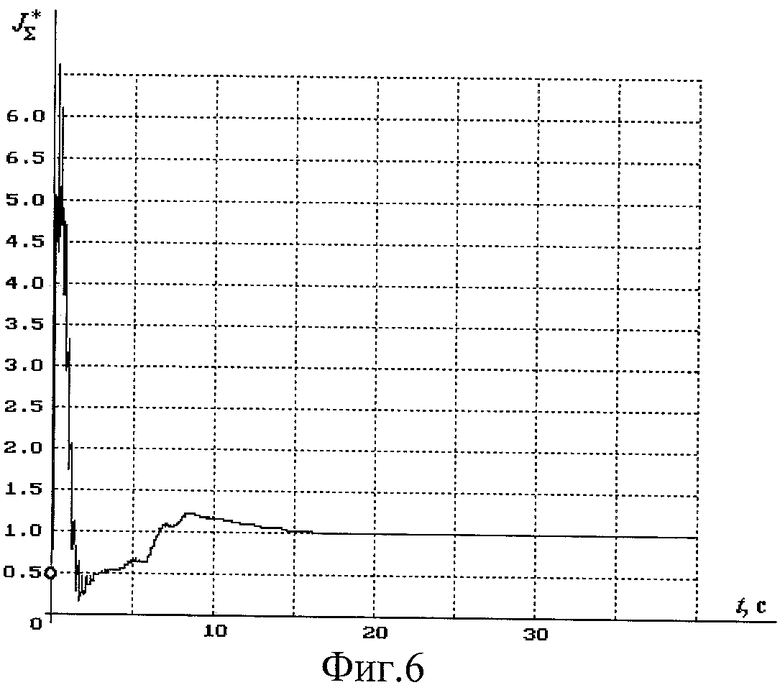
Фиг.6 - процесс оценивания момента инерции при начальном отклонении всех параметров на 75%.
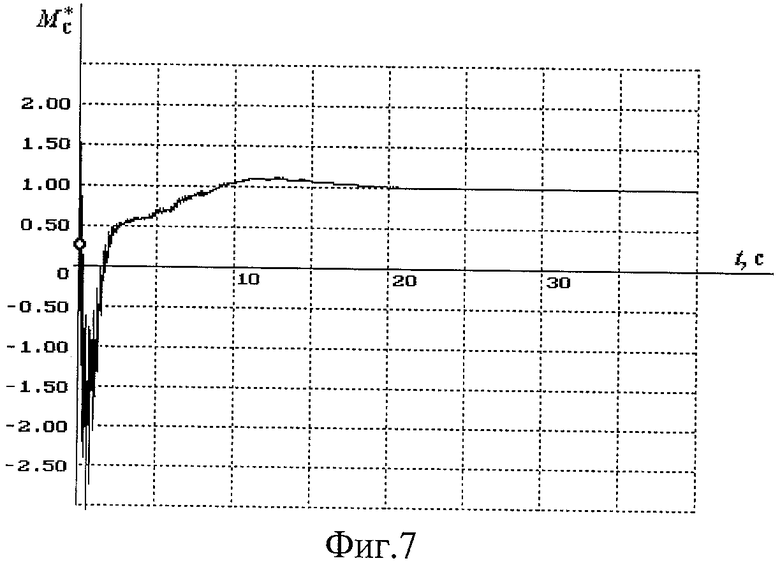
Фиг.7 - процесс оценивания статического момента при начальном отклонении всех параметров на 75%.
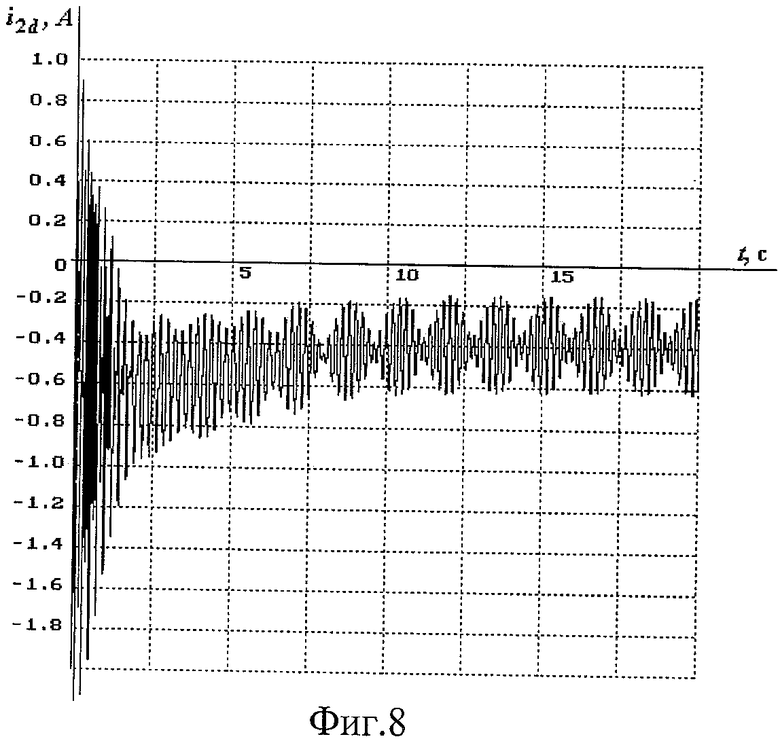
Фиг.8 - процесс оценивания тока i2d при начальном отклонении всех параметров на 75%.
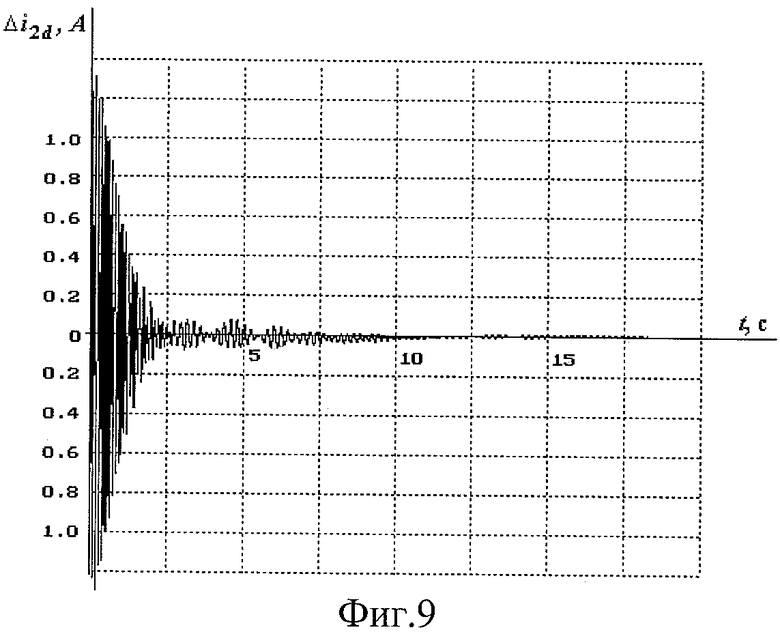
Фиг.9 - погрешность оценивания тока i2d ротора при начальном отклонении всех параметров на 75%.
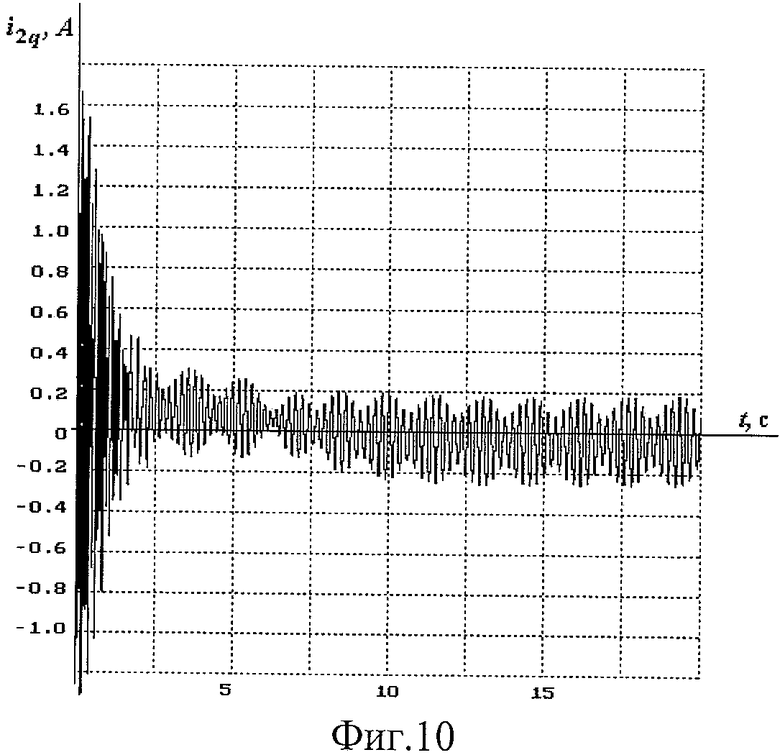
Фиг.10 - процесс оценивания тока i2q при начальном отклонении всех параметров на 75%.
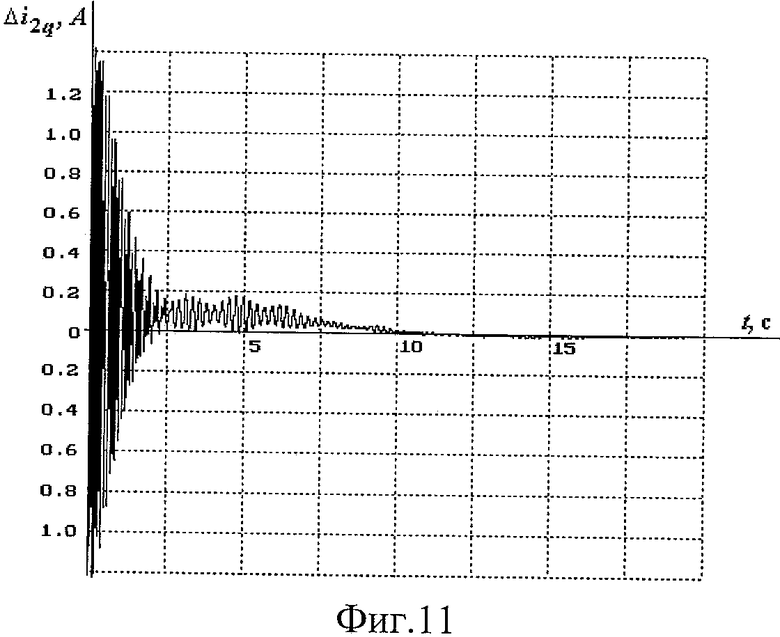
Фиг.11 - погрешность оценивания тока i2q ротора при начальном отклонении всех параметров на 75%.
Функциональная схема устройства оценивания параметров асинхронного двигателя (фиг.1) содержит асинхронный электродвигатель 1, параметры и величины которого подлежат оцениванию, блок 2 датчиков, структурно представленный на фиг.2, содержащий датчики фазных напряжений статора 4, 5, 6, датчики фазных токов статора 7, 8, 9, датчик частоты вращения 10 и датчик углового ускорения 11, блок 3 преобразователя координат, структурно представленный на фиг.2, содержащий преобразователь фазных напряжений статора 13, преобразователь фазных токов статора 14, устройства дифференцирования 15, 16, интегратор 12, сумматор 17, блок вычисления оценок параметров и величин электродвигателя, содержащий сумматоры 18-38, умножители 39-88, делители 89-90, интеграторы 91-98. Внешний сигнал скорости вращения системы ортогональных координат подается на первый вход сумматора 17 и на вход интегратора 12, выход которого соединен со вторыми входами преобразователя фазных напряжений статора 13 и преобразователя фазных токов статора 14, этот сигнал также подается на первые входы умножителей 56, 75 и на второй вход умножителя 74. Датчик углового ускорения 11 механически связан с валом асинхронного двигателя 1, а его выход соединен со вторыми входами умножителей 84, 85. Датчик частоты вращения 10 механически связан с валом асинхронного двигателя 1, а его выход соединен со вторыми входами умножителей 72, 66, 76, с первыми входами умножителей 77, 48 и со вторым входом сумматора 17. Выход сумматора 17 соединен с первым входом умножителя 45 и с первыми входами умножителей 46 и 47, выходы которых соединены со вторыми входами сумматоров 25 и 27 соответственно. Выходы датчиков фазных токов статора 7, 8, 9, входы которых подсоединены к фазным обмоткам статора трехфазного асинхронного двигателя 1, соединены с первым, третьим, четвертым входами преобразователя фазных токов статора 14. Первый выход преобразователя фазных токов статора 14 соединен с первыми входами умножителей 39, 80, со вторым входом умножителя 62, с первыми входами умножителей 40, 61 и 58, выходы которых соединены с первыми входами сумматоров 26, 22 и третьим входом сумматора 23 соответственно, со вторым входом умножителя 75, выход которого соединен с первым входом сумматора 35, и с первым входом устройства дифференцирования 15. Второй выход преобразователя фазных токов статора 14 соединен с первыми входами умножителей 43, 44, 74, выходы которых соединены со вторыми входами сумматоров 22, 24, 34 соответственно, с первым входом умножителя 55, 57, 81, со вторым входом умножителя 68 и с первым входом устройства дифференцирования 16. Выход устройства дифференцирования 15 соединен с первыми входами умножителя 42 и сумматора 34, выходы которых соединены с третьим входом сумматора 25 и со вторым входом умножителя 63 соответственно и с первым входом умножителя 41. Выход устройства дифференцирования 16 соединен с первым входом умножителя 52, выход которого соединен с третьим входом сумматора 27; со вторым входом сумматора 35, выход которого соединен с первым входом умножителя 69; с первым входом умножителя 51, выход которого соединен с третьим входом сумматора 22, выход которого соединен со вторым входом сумматора 23. Выходы датчиков фазных напряжений статора 4, 5, 6, входы которых подсоединены к фазным обмоткам статора трехфазного асинхронного двигателя 1, подсоединены к первому, третьему, четвертому входам преобразователя фазных напряжений статора 13. Второй выход преобразователя фазных напряжений статора 13 соединен с первым входом сумматора 23, выход которого соединен с первыми входами умножителей 68, 70, 72 и вторыми входами умножителей 69, 71, 73. Первый выход преобразователя фазных напряжений статора 13 соединен с первым входом сумматора 20, второй вход которого соединен с выходом умножителя 39, третий вход соединен с выходом умножителя 41, четвертый вход соединен с выходом умножителя 55, пятый вход соединен с выходом умножителя 57. Выход сумматора 20 соединен с первым входом сумматора 21, второй вход которого соединен с выходом умножителя 49, а третий вход соединен с выходом умножителя 59. Выход сумматора 21 соединен с первым входом умножителей 62-66 и вторым входом умножителя 67. Выход умножителя 62 соединен с первым входом сумматора 28, второй вход которого соединен с выходом умножителя 68, а выход соединен с входом интегратора 91, выход которого соединен со вторыми входами умножителей 39, 43. Выход умножителя 63 соединен с первым входом сумматора 29, второй вход которого соединен с выходом умножителя 69, а выход соединен с входом интегратора 92, выход которого соединен с первым входом делителя 89, 90, с первым входом сумматора 18, выход которого соединен со вторыми входами умножителей 41 и 51, со вторым входом умножителя 56, выход которого соединен со вторыми входами умножителей 57 и 58. Выход делителя 89 соединен со вторыми входами умножителей 54, 50, 78 и первым входом умножителя 79. Выход делителя 90 соединен со вторыми входами умножителей 86, 87, с первым входом умножителя 88 и со вторыми входами умножителей 42, 52, 44 и 40. Выход умножителя 64 соединен с первым входом сумматора 30, второй вход которого соединен с выходом умножителя 82, третий вход соединен с выходом умножителя 71, а его выход соединен с входом интегратора 94. Выход интегратора 94 соединен со вторым входом делителя 90, со вторым входом умножителя 88, со вторым входом умножителя 48, выход которого соединен со вторыми входами умножителей 59 и 60, с третьими входами умножителей 72 и 66, со вторым входом умножителя 83. Выход умножителя 83 соединен с первым входом сумматора 38, выход которого соединен со вторым входом умножителя 82, с входом интегратора 98, выход которого соединен с третьим входом сумматора 38, и с первым входом умножителя 85, выход которого соединен с входом интегратора 97, выход которого соединен с первым входом умножителя 84. Выход умножителя 88 соединен со вторым входом сумматора 18 и вторым входом умножителя 45, выход которого соединен со вторыми входами умножителей 55 и 61. Выход умножителя 65 соединен со вторым входом сумматора 31, первый вход которого соединен с выходом сумматора 25, третий вход соединен с выходом умножителя 72, а его выход соединен с входом интегратора 95. Выход интегратора 95 соединен: со вторым входом умножителя 77, выход которого соединен с первым входом сумматора 37, выход которого соединен с первым входом умножителя 71; с первым входом умножителя 78, выход которого соединен с первым входом сумматора 36; со вторым входом умножителя 67, выход которого соединен со вторым входом сумматора 33; со вторым входом умножителя 81, выход которого соединен с первым входом сумматора 19; с первым входом умножителя 60, выход которого соединен с четвертым входом сумматора 22; с первым входом сумматора 26, выход которого соединен со вторым входом умножителя 47; с первым входом умножителя 50, выход которого соединен с первым входом сумматора 25; с первым входом умножителя 49. Выход умножителя 66 соединен с третьим входом сумматора 32, первый вход которого соединен с выходом сумматора 27, второй вход соединен с выходом умножителя 73, а его выход соединен с входом интегратора 96. Выход интегратора 96 соединен: со вторым входом умножителя 79, выход которого соединен со вторым входом сумматора 37, выход которого соединен с первым входом умножителя 71; с первым входом умножителя 76, выход которого соединен со вторым входом сумматора 36, выход которого соединен со вторым входом умножителя 64; с первым входом умножителя 80, выход которого соединен со вторым входом сумматора 19, выход которого соединен с первыми входами умножителей 82 и 83; с первым входом сумматора 24, выход которого соединен со вторым входом умножителя 46; с первым входом умножителя 54, выход которого соединен с первым входом сумматора 27; с первыми входами умножителей 53 и 59; со вторым входом умножителя 70. Выход умножителя 67 соединен со вторым входом сумматора 33, первый вход которого соединен с выходом умножителя 70, а его выход соединен с первым входом умножителя 86, выход которого соединен с входом интегратора 93. Выход интегратора 93 соединен со вторым входом делителя 89; с первым входом умножителя 87, выход которого соединен со вторыми входами умножителей 49 и 65; с первым входом умножителя 73; со вторым входом умножителя 53, выход которого соединен с пятым входом сумматора 22.
В теории обобщенных электрических машин известны уравнения асинхронного электродвигателя в осях d, q
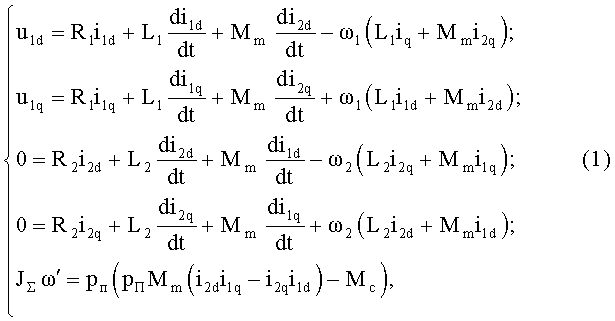
где u1d, u1q - напряжения продольной и поперечной фаз статора обобщенной машины; i1d, i1q - токи фаз обмотки статора; i2d, i2q - токи фаз обмотки ротора; L1, L2 - индуктивности фаз обмоток статора и ротора; R1, R2 - их активное сопротивление фаз обмоток статора и ротора; Mm - взаимная индуктивность; J - момент инерции подвижных частей; рП - число пар полюсов; Mc - статический момент нагрузки; ω1 - частота вращения системы координат d, q, эл.рад/с; ω2 - частота скольжения, эл.рад/с.
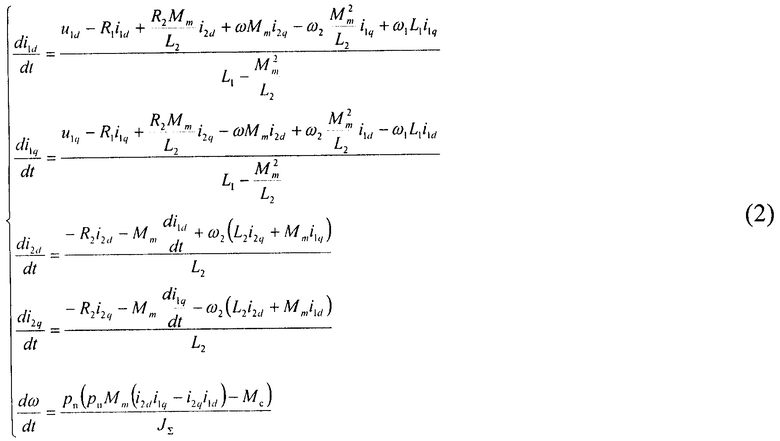
При выполнении некоторых преобразований, система (1) может быть представлена в виде
Следует отметить, что в процессе оценивания приходится иметь дело сразу с двумя видами параметров - истинными значениями и их оценками. Аналогично обстоит дело и с оцениванием величин, не подлежащих непосредственному измерению.
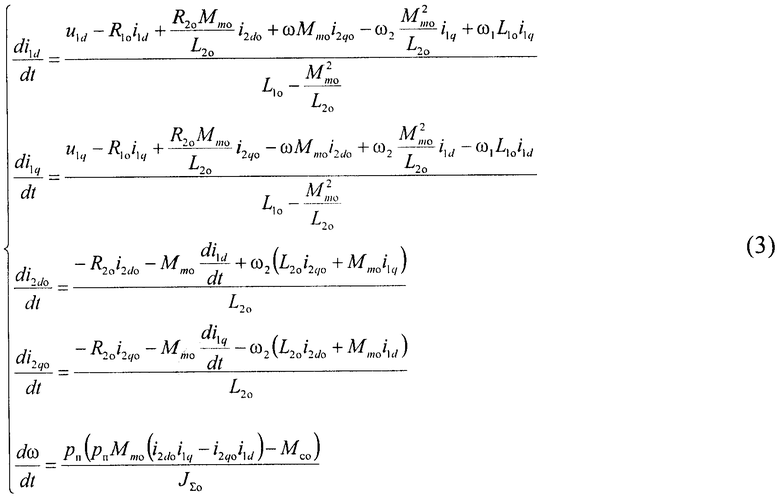
Оценки параметров условимся обозначать R1, L1, R2, L2, Mm, J∑, Mc, а оценки процессов - i2d, i2q. При этом истинные значения параметров обозначим R1o, L1o, R2o, Mmo, J∑o, Mco, а истинные значения процессов - i2do, i2qo. Следует отметить, что уравнения системы (2) не выполняются с оценками параметров и процессов.
При условии, что все процессы и параметры имеют истинные значения, система уравнений обобщенной машины (2) принимает вид
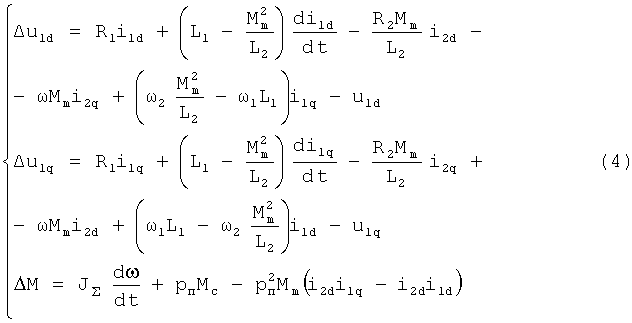
В случае идеальном оценки и истинные значения параметров и величин должны совпадать, однако оценки в произвольный момент времени отличаются от истинных значений. В связи с этим появляются отклонения, именуемые невязками.
Запишем уравнения невязок
Введем функции невязок

Невязки в процессе оценивания должны стремиться к нулю, а функции невязок должны быть минимизированы.
Традиционно приведение параметров ротора АД к статору осуществляется таким образом, что количество витков фазы обмотки статора w1 равно количеству витков фазы обмотки ротора w2. Подобный подход к преобразованию координат позволяет получить индуктивность от основного потока статора, численно равную индуктивности от основного потока ротора. При этом индуктивности фаз статора и ротора от потоков рассеяния будут различными. Таким образом, в процессе оценивания необходимо оценивать следующие пять параметров схемы замещения фазы АД, а именно: R1, L1, R2, L2, Mm. Кроме того, оцениванию подлежат также параметры J∑, Mc, поэтому общее количество оцениваемых параметров равно семи.
В данном случае предлагается осуществлять приведение параметров ротора АД к статору так, чтобы обеспечить равенство индуктивностей фаз статора L1 и ротора L2. Отметим, что и при подобном подходе индуктивности фаз статора и ротора от потоков рассеяния будут различными. При этом количество параметров схемы замещения фазы АД, подлежащих оцениванию, сокращается до четырех. Наряду с этим оцениванию подлежат также параметры J∑, Mc. Общее количество оцениваемых параметров равно шести.
Составим систему дифференциальных уравнений относительно оценок параметров согласно непрерывному градиентному методу поиска минимума функции или, иначе говоря, определим скорости изменения оценок параметров
где  , µL,
, µL,  ,
,  ,
,  , µM - положительные коэффициенты, определяющие скорости изменения оценок параметров; λ - весовой коэффициент, определяющий относительное влияние функций невязок Vu1 и VM.
, µM - положительные коэффициенты, определяющие скорости изменения оценок параметров; λ - весовой коэффициент, определяющий относительное влияние функций невязок Vu1 и VM.
Величины коэффициентов  , µL,
, µL,  , , , µM выбираются согласно характеру сигналов i1d(t), i2d(t), i1q(t), i2q(t), i'1d(t), i'1q(t), ω1(t), ω(t), ω'(t) и общим требованиям к электроприводу. Отметим, что параметр Mm оценивается по функции Vu1 и входит в функцию VM.
, , , µM выбираются согласно характеру сигналов i1d(t), i2d(t), i1q(t), i2q(t), i'1d(t), i'1q(t), ω1(t), ω(t), ω'(t) и общим требованиям к электроприводу. Отметим, что параметр Mm оценивается по функции Vu1 и входит в функцию VM.
Оценивание токов ротора производим на основании решения дифференциальных уравнений, записанных согласно непрерывному градиентному методу поиска минимума функции с учетом третьего и четвертого уравнений системы (2)
где µI - положительный коэффициент, определяющий скорости изменения токов ротора.
Первые слагаемые в уравнениях (12), (13) позволяют определять токи ротора при условии, что оценки параметров и процессов определены корректно. Однако оценки параметров и токов ротора имеют отклонения от истинных значений. Для учета влияния этого фактора в уравнения (12), (13) введены вторые слагаемые. Иными словами, первые слагаемые в (12), (13) позволяют определять токи ротора на основании уравнений динамики, а вторые слагаемые учитывают отклонения этих токов от истинных значений.
Таким образом, систему уравнений обобщенной машины (3) можно рассматривать как математическую модель объекта оценивания, а систему уравнений (4) в совокупности с уравнениями (6)-(11) - как математическую модель системы оценивания параметров обобщенной машины R1, L1, R2, L2, Mm, J∑ и Mc. При этом система уравнений (3) в совокупности с уравнениями (12), (13) представляют собой математическую модель системы оценивания токов ротора i2d(t), i2q(t), являющихся величинами, не подлежащими непосредственному измерению.
Следует отметить, что процесс оценивания токов ротора не останавливается в отличие от процесса оценивания параметров, а продолжается параллельно с изменением реальных токов в роторе.
Устройство оценивания параметров асинхронного двигателя работает следующим образом. В процессе функционирования электродвигателя в блоке датчиков 1, на датчиках 4, 5, 6, 7, 8, 9, 10, 11 вырабатываются сигналы u1A, u1B, u1C, i1A, i1B, i1C, ω, ω'. В блоке преобразования координат 3 интегратором 12 осуществляется вычисление угла α1 путем интегрирования сигнала ω1, поступающего от системы управления электропривода. Преобразователем напряжений статора 13 выполняется преобразование фазных напряжений статора u1A, i1B, i1C в напряжения u1d, u1q. Преобразователем токов статора выполняется преобразование фазных токов статора i1A, i1B, i1C в токи i1d, i1q. На выходе сумматора 17 формируется сигнал ω2. В устройствах дифференцирования 13, 14 осуществляется дифференцирование токов i1d(t), i1q(t). На выходе сумматора 18 формируется сигнал  . На выходах умножителей 39, 41, 45, 55, 56, 57, 49, 48, 59 формируются сигналы R1i1d,
. На выходах умножителей 39, 41, 45, 55, 56, 57, 49, 48, 59 формируются сигналы R1i1d,  ,
,  ,
,  , ω1L1, ω1L1i1q,
, ω1L1, ω1L1i1q,  , ωMm, ωMmi2q. Сигналы с выходов умножителей 39, 41, 55, 57 подаются на входы сумматора 20, сюда же подается сигнал u1d. Сигналы с выходов умножителей 49, 59 и сумматора 20 подаются на входы сумматора 21, на выходе которого формируется невязка Δu1d. Аналогичным образом на выходах умножителей 61, 43, 51, 60, 53 формируются сигналы
, ωMm, ωMmi2q. Сигналы с выходов умножителей 39, 41, 55, 57 подаются на входы сумматора 20, сюда же подается сигнал u1d. Сигналы с выходов умножителей 49, 59 и сумматора 20 подаются на входы сумматора 21, на выходе которого формируется невязка Δu1d. Аналогичным образом на выходах умножителей 61, 43, 51, 60, 53 формируются сигналы  , R1i1q,
, R1i1q,  ω1Mmi2d,
ω1Mmi2d,  , которые поступают на сумматор 22. На выходе умножителя 58 формируется сигнал ω1L1i1d, который на сумматоре 23 суммируется с напряжением u1q и выходным сигналом сумматора 22. На выходе сумматора 23 формируется невязка Δu1q. Умножителями 62, 68 и сумматором 28 формируется выражение Δu1di1d+Δu1qi1q. Умножителями 74, 75, 63, 69 и сумматорами 34, 35, 29 формируется выражение минус
, которые поступают на сумматор 22. На выходе умножителя 58 формируется сигнал ω1L1i1d, который на сумматоре 23 суммируется с напряжением u1q и выходным сигналом сумматора 22. На выходе сумматора 23 формируется невязка Δu1q. Умножителями 62, 68 и сумматором 28 формируется выражение Δu1di1d+Δu1qi1q. Умножителями 74, 75, 63, 69 и сумматорами 34, 35, 29 формируется выражение минус  . Умножителями 70, 67, 86 и сумматором 33 формируется выражение
. Умножителями 70, 67, 86 и сумматором 33 формируется выражение  . Умножителями 76-79, 64, 71, 82 и сумматорами 36, 37, 30 формируется выражение минус
. Умножителями 76-79, 64, 71, 82 и сумматорами 36, 37, 30 формируется выражение минус  На выходах умножителей 50, 42 и 44 формируются сигналы
На выходах умножителей 50, 42 и 44 формируются сигналы  ,
,  и
и  . Умножителями 44, 46 и сумматором 24 формируется сигнал
. Умножителями 44, 46 и сумматором 24 формируется сигнал  Выходные сигналы умножителей 42, 50 и 46 складываются на сумматоре 25. На выходах умножителей 65, 72 формируются сигналы
Выходные сигналы умножителей 42, 50 и 46 складываются на сумматоре 25. На выходах умножителей 65, 72 формируются сигналы  и Δu1qωMm, которые на сумматоре 31 складываются с выходным сигналом сумматора 25. Результат сложения поступает на вход интегратор 95, на выходе которого формируется оценка процесса i2d(t). На умножителях 52, 54 и 40 формируются сигналы
и Δu1qωMm, которые на сумматоре 31 складываются с выходным сигналом сумматора 25. Результат сложения поступает на вход интегратор 95, на выходе которого формируется оценка процесса i2d(t). На умножителях 52, 54 и 40 формируются сигналы  ,
,  и
и  Умножителями 40, 47 и сумматором 26 формируется сигнал
Умножителями 40, 47 и сумматором 26 формируется сигнал  . Выходные сигналы умножителей 52, 54 и 47 складываются на сумматоре 27. На выходах умножителей 73, 66 формируются сигналы
. Выходные сигналы умножителей 52, 54 и 47 складываются на сумматоре 27. На выходах умножителей 73, 66 формируются сигналы  и Δu1qωMm, которые на сумматоре 32 складываются с выходным сигналом сумматора 27. Результат сложения поступает на вход интегратора 96, на выходе которого формируется оценка процесса i2q(t). Умножителями 81, 80 и сумматором 19 формируется сигнал (i1qi2d-i1di2q). На выходе умножителя 83 формируется электромагнитный момент Мэ. Выходные сигналы умножителей 83, 84 и интегратора 98, представляющие собой электромагнитный Мэ, динамический J∑ω' и статический Mc моменты соответственно, складываются на сумматоре 38, на выходе которого формируется невязка ΔM. Таким образом, на выходе умножителя 82 вырабатывается сигнал
и Δu1qωMm, которые на сумматоре 32 складываются с выходным сигналом сумматора 27. Результат сложения поступает на вход интегратора 96, на выходе которого формируется оценка процесса i2q(t). Умножителями 81, 80 и сумматором 19 формируется сигнал (i1qi2d-i1di2q). На выходе умножителя 83 формируется электромагнитный момент Мэ. Выходные сигналы умножителей 83, 84 и интегратора 98, представляющие собой электромагнитный Мэ, динамический J∑ω' и статический Mc моменты соответственно, складываются на сумматоре 38, на выходе которого формируется невязка ΔM. Таким образом, на выходе умножителя 82 вырабатывается сигнал  , на выходе умножителя 85 формируется
, на выходе умножителя 85 формируется  . Сигналы минус
. Сигналы минус  , минус
, минус  , минус
, минус  , минус
, минус  , минус
, минус  , минус µMpпΔМ подаются на входы интеграторов 91-94, 97, 98, на выходах которых формируются оценки R1(t), L1(t), R2(t), Mm(t), J∑(t) и Mc(t). Масштабирующие блоки с коэффициентами рп и
, минус µMpпΔМ подаются на входы интеграторов 91-94, 97, 98, на выходах которых формируются оценки R1(t), L1(t), R2(t), Mm(t), J∑(t) и Mc(t). Масштабирующие блоки с коэффициентами рп и  , λ, используемые при решении уравнений (13), (15), на фиг.1 не показаны. К выходам интеграторов 92, 93 подключен делитель 89, на выходе которого формируется сигнал
, λ, используемые при решении уравнений (13), (15), на фиг.1 не показаны. К выходам интеграторов 92, 93 подключен делитель 89, на выходе которого формируется сигнал  , а к выходам интеграторов 92, 94 - делитель 90, на выходе которого формируется сигнал
, а к выходам интеграторов 92, 94 - делитель 90, на выходе которого формируется сигнал  . Умножителями 87 и 88 формируются сигналы
. Умножителями 87 и 88 формируются сигналы  и
и  .
.
Моделирование процессов оценивания параметров и величин электродвигателя на ПЭВМ в системе Turbo Pascal 7.0 подтвердило работоспособность и эффективность устройства оценивания параметров электродвигателя.
Моделирование проводилось при условии, что напряжения u1d(t), u1q(t) и частота ω1 изменяются во времени по законам
u1d(t)=U1o+U1dmsinω3t; u1q(t)=u1q(t)=U1qmcosω4t; ω1(t)=const.
Параметры функций u1d(t), u1q(t) приведены в таблице 1.


Кривые переходных процессов оценивания параметров, приведенные на фиг.3-7, получены при начальном отклонении оценок всех параметров от истинных значений на 75%. Графики представлены в относительных единицах. Отметим, что начальные отклонения оценок параметров R2, J∑ и Mc принимались на 75% меньше истинных значений, а начальные отклонения оценок параметров R1, L1, L2, Mm - на 75% больше истинных значений. Видно, что длительность процессов оценивания составляет 23 с, после чего все параметры достигают своих истинных значений.
Начальные отклонения оценок параметров на фиг.3-7 отмечены кружками. Очевидно, что при завершении процессов оценивания и достижении перечисленными параметрами их истинных значений графики  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  выходят на уровень, соответствующий единице.
выходят на уровень, соответствующий единице.
Временные диаграммы фазных токов ротора i2d, i2q, а также погрешностей оценивания токов ротора при начальном отклонении оценок всех параметров от истинных значений на 75% приводятся на фиг.8-11. Видно, что погрешности оценивания токов ротора достигают значений, близких к нулю, за 19 с.
Погрешность оценивания токов ротора определялась следующим образом:
Δi2d(t)=i2d(t)-i2do(t); Δi2q(t)=i2q(t)-i2qo(t).
Оценка точности результатов оценивания при начальном отклонении оценок всех параметров от истинных значений параметров на 50% и 75% приводится в таблице 2.
В квазистационарном режиме можно положить R1o, L1o, R2o, L2o, Mmo, J∑o, Mco, а также i2do, i2qo постоянными. Тогда устойчивость процессов оценивания можно определить с помощью функции Ляпунова


Функция F является определенно положительной, она строго больше нуля, если оценка хотя бы одного из параметров R1, L1, R2, Mm, J∑, Mc или процессов i2d, i2q отличается от истинного значения.
Производная этой функции во времени в силу уравнений оценивания (6)-(11) градиентным методом имеет вид
Таким образом, согласно методу анализа устойчивости с помощью функций Ляпунова существование определенно положительных функций от фазовых координат, производная от которых по времени в силу дифференциальных уравнений движения определенно отрицательная, обеспечивает асимптотическую устойчивость движения.
С помощью компьютерного моделирования проводилось исследование влияния величины весового коэффициента λ на характер переходных процессов оценивания, а также их устойчивость. Установлено, что при изменении величин u1d(t) и u1q(t), имеющих параметры, приведенные в таблице 1, величина весового коэффициента λ не оказывает определяющего влияния на характер процессов оценивания и их устойчивость. Кроме того, установлено, что оценивание осуществляется даже при λ, равном нулю, а сам процесс оценивания продолжает оставаться устойчивым. В таком случае отсутствие третьего слагаемого в уравнении (9), можно рассматривать как наличие постоянно действующего возмущения, при котором устойчивость есть, но не асимптотическая.
Устройство оценивания параметров асинхронного двигателя увеличивает число оцениваемых параметров электродвигателя, оценивает величины, не подлежащие непосредственному измерению, и позволяет использовать его с асинхронными двигателями за счет того, что введены внешний сигнал скорости вращения системы ортогональных координат, датчики фазных напряжений и токов статора и углового ускорения вала двигателя, преобразователи фазных напряжений и токов статора, два устройства дифференцирования, двадцать два сумматора, пятьдесят умножителей, два делителя, девять интеграторов, и между всеми элементами устройства определенным образом организованы связи. Данное устройство не требует изменения конструкции серийно выпускаемых трехфазных асинхронных двигателей. Использование данного устройства в автоматизированном электроприводе допускает реализацию модального или адаптивного управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2392731C1 |
| Устройство для контроля аппаратуры управления электростанций | 1983 |
|
SU1201799A1 |
| СПОСОБ ЭСТЕТИЧЕСКОГО МОДЕЛИРОВАНИЯ КОНТУРОВ ТЕЛА | 2008 |
|
RU2388452C2 |
| СПОСОБ ЛЕЧЕНИЯ ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ И ГАЗОВЫЙ СОСТАВ (ВАРИАНТЫ) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2370269C2 |
| ПОДВОДНЫЙ АППАРАТ | 2011 |
|
RU2466055C2 |
| Программируемый логический модуль | 1984 |
|
SU1233274A1 |
| ТЕРМИЧЕСКИ ИНГИБИРОВАННЫЙ КРАХМАЛ И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2019 |
|
RU2823727C2 |
| СПОСОБ КОСМЕТИЧЕСКОГО МАССАЖА ДЛЯ ФОРМИРОВАНИЯ СКУЛЫ И ОВАЛА ЛИЦА | 2011 |
|
RU2471470C1 |
| СИСТЕМЫ И СПОСОБЫ СНИЖЕНИЯ СКОРОСТИ ЗАГРЯЗНЕНИЯ ТЕПЛООБМЕННИКА | 2020 |
|
RU2783377C1 |
| УСТРОЙСТВО ДЕКОДИРОВАНИЯ СОВМЕСТНО ХРАНИМЫХ ГРАНИЦ ПРИ ИНТЕРВАЛЬНЫХ ВЫЧИСЛЕНИЯХ | 2012 |
|
RU2497179C1 |
Изобретение относится к автоматизированному электроприводу, в частности к автоматизированной идентификации параметров асинхронного электропривода. Технический результат - использование устройства оценивания параметров электродвигателя с асинхронными электродвигателями, увеличении числа оцениваемых параметров электродвигателя и оценка величин, не подлежащих непосредственному измерению. Заявленное устройство содержит асинхронный электродвигатель, параметры которого подлежат оцениванию, датчики фазных напряжений статора, датчики фазных токов статора, датчик частоты вращения вала, датчик углового ускорения, преобразователь фазных напряжений и преобразователь фазных токов статора, позволяющие преобразовывать фазные напряжения и токи статора в напряжения и токи обобщенной машины, устройства дифференцирования, умножители, интеграторы, делители и сумматоры. Поставленная задача осуществляется тем, что согласно изобретению введены внешний сигнал скорости вращения системы ортогональных координат, три датчика напряжения фаз статора, три датчика тока фаз статора, датчик углового ускорения, преобразователь фазных напряжений статора, преобразователь фазных токов статора, два устройства дифференцирования, двадцать два сумматора, пятьдесят умножителей, два делителя и девять интеграторов. 2 табл., 11 ил.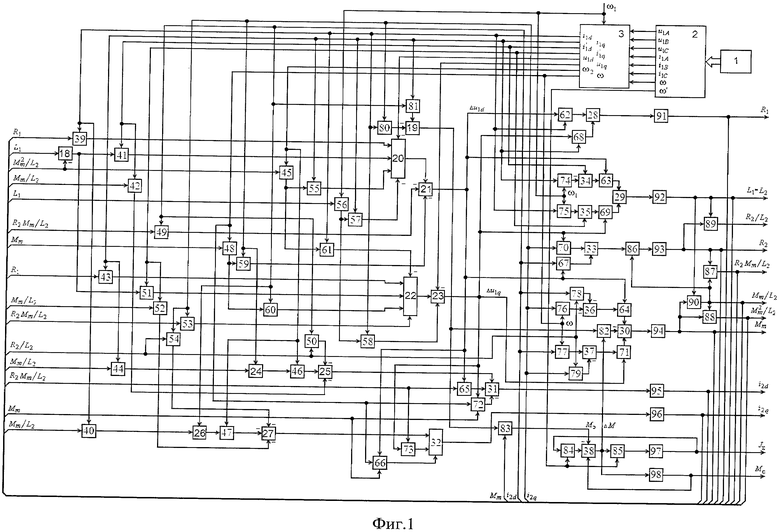
Устройство оценивания параметров электродвигателя, содержащее электромеханический преобразователь, подсоединенный к нему блок датчиков, содержащий датчик частоты вращения, отличающееся тем, что электромеханическим преобразователем является трехфазный асинхронный двигатель, а устройство оценивания параметров асинхронного двигателя дополнительно содержит блок вычисления оценки параметров и величин, не подлежащих непосредственному измерению, трехфазного асинхронного двигателя, включающий в себя восемнадцатый - тридцать восьмой сумматоры, тридцать девятый - восемьдесят восьмой умножители, восемьдесят девятый - девяностый делители, девяносто первый - девяносто восьмой интеграторы, причем устройство дополнительно содержит блок преобразователя координат, который содержит устройства дифференцирования (пятнадцать и шестнадцать), интегратор (двенадцать), сумматор (семнадцать), преобразователь фазных напряжений статора (тринадцать), преобразователь фазных токов статора (шестнадцать), на первый вход семнадцатого сумматора и вход двенадцатого интегратора, выход которого соединен со вторыми входами преобразователя фазных напряжений статора (тринадцать) и преобразователя фазных токов статора (четырнадцать), подается внешний сигнал скорости вращения системы ортогональных координат, этот сигнал также подается на первые входы пятьдесят шестого и семьдесят пятого умножителей и на второй вход семьдесят четвертого умножителя, а блок датчиков содержит датчик углового ускорения (одиннадцать), установленный на валу асинхронного двигателя, выход которого соединен со вторыми входами восемьдесят четвертого, восемьдесят пятого умножителей, датчик частоты вращения (десять), установленный на валу асинхронного двигателя, выход которого соединен со вторыми входами семьдесят второго, шестьдесят шестого, семьдесят шестого умножителей, с первыми входами семьдесят седьмого, сорок восьмого умножителей и со вторым входом семнадцатого сумматора, выход которого соединен с первым входом сорок пятого умножителя и с первыми входами сорок шестого и сорок седьмого умножителей, выходы которых соединены со вторыми входами двадцать пятого и двадцать седьмого сумматоров, соответственно, седьмой, восьмой, девятый датчики фазных токов статора, выходы которых соединены с первым, третьим, четвертым входом преобразователя фазных токов статора (четырнадцать), первый выход которого соединен с первыми входами тридцать девятого, восьмидесятого умножителей, со вторым входом шестьдесят второго умножителя, с первыми входами сорокового, шестьдесят первого, пятьдесят восьмого умножителей, выходы которых соединены с первыми входами двадцать шестого, двадцать второго, третьим входом двадцать третьего сумматоров, со вторым входом семьдесят пятого умножителя, выход которого соединен с первым входом тридцать пятого сумматора, с первым входом пятнадцатого устройства дифференцирования, выход которого соединен с первыми входами сорок второго умножителя и тридцать четвертого сумматора, выходы которых соединены с третьим входом двадцать пятого сумматора и со вторым входом шестьдесят третьего умножителя, соответственно, и с первым входом сорок первого умножителя, второй выход преобразователя фазных токов статора соединен с первыми входами сорок третьего, сорок четвертого, семьдесят четвертого умножителей, выходы которых соединены со вторыми входами двадцать второго, двадцать четвертого, тридцать четвертого сумматоров, с первым входом пятьдесят пятого, пятьдесят седьмого, восемьдесят первого умножителя, со вторым входом шестьдесят восьмого умножителя и с первым входом шестнадцатого устройства дифференцирования, выход которого соединен с первым входом пятьдесят второго умножителя, выход которого соединен с третьим входом двадцать седьмого сумматора, с первым входом пятьдесят первого умножителя, выход которого соединен с третьим входом двадцать второго сумматора, выход которого соединен со вторым входом двадцать третьего сумматора и со вторым входом тридцать пятого сумматора, выход которого соединен с первым входом шестьдесят девятого умножителя, четвертый, пятый, шестой датчики фазных напряжений статора, входы которых подсоединены к фазным обмоткам статора, а выходы подсоединены к первому, третьему, четвертому входам преобразователя фазных напряжений статора (тринадцать), второй выход которого соединен с первым входом двадцать третьего сумматора, выход которого соединен с первыми входами шестьдесят восьмого, семидесятого, семьдесят второго умножителей и вторыми входами шестьдесят девятого, семьдесят первого, семьдесят третьего умножителей, а его первый выход соединен с первым входом двадцатого сумматора, второй вход которого соединен с выходом тридцать девятого умножителя, третий вход соединен с выходом сорок первого умножителя, четвертый вход соединен с выходом пятьдесят пятого умножителя, пятый вход соединен с выходом пятьдесят седьмого умножителя, а его выход соединен с первым входом двадцать первого сумматора, второй вход которого соединен с выходом сорок девятого умножителя, третий вход соединен с выходом пятьдесят девятого умножителя, а выход соединен с первым входом шестьдесят второго - шестьдесят шестого умножителей и вторым входом шестьдесят седьмого умножителя, выходы которых соединены с первым входом двадцать восьмого сумматора, второй вход которого соединен с выходом шестьдесят восьмого умножителя, а выход соединен с входом девяносто первого интегратора, выход которого соединен со вторыми входами тридцать девятого и сорок третьего умножителей, с первым входом двадцать девятого сумматора, второй вход которого соединен с выходом шестьдесят девятого умножителя, а выход соединен с входом девяносто второго интегратора, выход которого соединен с первым входом восемнадцатого сумматора, выход которого соединен со вторыми входами сорок первого и пятьдесят первого умножителей, вторым входом пятьдесят шестого умножителя, выход которого соединен со вторыми входами пятьдесят седьмого, пятьдесят восьмого умножителей, с первым входом восемьдесят девятого делителя, выход которого соединен со вторыми входами пятьдесят четвертого, пятидесятого, семьдесят восьмого умножителей и первым входом семьдесят девятого умножителя, с первым входом девяностого делителя, выход которого соединен со вторыми входами восемьдесят шестого, восемьдесят седьмого умножителей, с первым входом восемьдесят восьмого умножителя и со вторыми входами сорок второго, пятьдесят второго, сорок четвертого и сорокового умножителей, с первым входом тридцатого сумматора, второй вход которого соединен с выходом восемьдесят второго умножителя, третий вход соединен с выходом семьдесят первого умножителя, а его выход соединен с входом девяносто четвертого интегратора, выход которого соединен со вторым входом девяностого делителя, со вторым входом восемьдесят восьмого умножителя, выход которого соединен со вторым входом восемнадцатого сумматора и вторым входом сорок пятого умножителя, выход которого соединен со вторыми входами пятьдесят пятого и шестьдесят первого умножителей, со вторым входом сорок восьмого умножителя, выход которого соединен со вторыми входами пятьдесят девятого и шестидесятого умножителей, с третьими входами семьдесят второго и шестьдесят шестого умножителей, со вторым входом восемьдесят третьего умножителя, выход которого соединен с первым входом тридцать восьмого сумматора, выход которого соединен со вторым входом восемьдесят второго умножителя, с входом девяносто восьмого интегратора, выход которого соединен с третьим входом тридцать восьмого сумматора и с первым входом восемьдесят пятого умножителя, выход которого соединен с входом девяносто седьмого интегратора, выход которого соединен с первым входом восемьдесят четвертого умножителя, со вторым входом тридцать первого сумматора, первый вход которого соединен с выходом двадцать пятого сумматора, третий вход соединен с выходом семьдесят второго умножителя, а его выход соединен с входом девяносто пятого интегратора, выход которого соединен со вторым входом семьдесят седьмого умножителя, выход которого соединен с первым входом тридцать седьмого сумматора, выход которого соединен с первым входом семьдесят первого умножителя, с первым входом семьдесят восьмого умножителя, выход которого соединен с первым входом тридцать шестого сумматора, со вторым входом шестьдесят седьмого умножителя, выход которого соединен со вторым входом тридцать третьего сумматора, со вторым входом восемьдесят первого умножителя, выход которого соединен с первым входом девятнадцатого сумматора, с первым входом шестидесятого умножителя, выход которого соединен с четвертым входом двадцать второго сумматора, с первым входом двадцать шестого сумматора, выход которого соединен со вторым входом сорок седьмого умножителя, с первым входом пятидесятого умножителя, выход которого соединен с первым входом двадцать пятого сумматора, и с первым входом сорок девятого умножителя, с третьим входом тридцать второго сумматора, первый вход которого соединен с выходом двадцать седьмого сумматора, второй вход соединен с выходом семьдесят третьего умножителя, а его выход соединен с входом девяносто шестого интегратора, выход которого соединен со вторым входом семьдесят девятого умножителя, выход которого соединен со вторым входом тридцать седьмого сумматора, выход которого соединен с первым входом семьдесят первого умножителя, с первым входом семьдесят шестого умножителя, выход которого соединен со вторым входом тридцать шестого сумматора, выход которого соединен со вторым входом шестьдесят четвертого умножителя, с первым входом восьмидесятого умножителя, выход которого соединен со вторым входом девятнадцатого сумматора, выход которого соединен с первыми входами восемьдесят второго и восемьдесят третьего умножителей, с первым входом двадцать четвертого сумматора, выход которого соединен со вторым входом сорок шестого умножителя, с первым входом пятьдесят четвертого умножителя, выход которого соединен с первым входом двадцать седьмого сумматора, с первыми входами пятьдесят третьего, пятьдесят девятого умножителей, и со вторым входом семидесятого умножителя, со вторым входом тридцать третьего сумматора, первый вход которого соединен с выходом семидесятого умножителя, а его выход соединен с первым входом восемьдесят шестого умножителя, выход которого соединен с входом девяносто третьего интегратора, выход которого соединен со вторым входом восемьдесят девятого делителя, с первым входом восемьдесят седьмого умножителя, выход которого соединен со вторыми входами сорок девятого, шестьдесят пятого умножителей, с первым входом семьдесят третьего умножителя, вторым входом пятьдесят третьего умножителя, выход которого соединен с пятым входом двадцать второго сумматора, соответственно.
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 1991 |
|
RU2030088C1 |
| Способ параметрического управления асинхронным короткозамкнутым электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1989 |
|
SU1697250A1 |
| Электропривод постоянного тока с оптимальным управлением | 1986 |
|
SU1471274A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |
| Способ восстановления азотированных коленчатых валов | 1988 |
|
SU1638200A1 |

