Изобретение относится к автоматизированному электроприводу, в частности к автоматизированной идентификации параметров электропривода, и может найти применение в адаптивных и самонастраивающихся системах.
Известно устройство оценивания параметров объекта управления, содержащее два блока интеграторов и блок решения системы линейных неоднородных алгебраических уравнений (Методы классической и современной теории автоматического управления. Т.2. - М.: Изд-во МГТУ им. Н.Э.Баумана, 2004. - Стр.331) - [1].
Недостатком устройства является его сложность, связанная с большим числом интеграторов и с необходимостью решения системы уравнений.
Наиболее близким к заявляемому объекту по технической сущности является устройство оценивания параметров электродвигателя, содержащее датчики тока, его производной и частоты вращения выходного вала, сумматор, формирователь сигнала ошибки по напряжению, первую и вторую группы по три умножителя, три масштабирующих устройства, три интегратора, входы которых через масштабирующие устройства соединены с выходами второй группы умножителей. Входы формирователя сигнала ошибки по напряжению подключены к входу электродвигателя и выходу сумматора, а выход соединен со вторыми входами второй группы умножителей, первые входы которых соединены с выходами датчиков тока, его производной и частоты вращения вала электродвигателя соответственно, входы двух первых датчиков соединены с якорной цепью электродвигателя, а третий датчик механически соединен с валом электродвигателя. Выходы интеграторов соединены со вторыми входами первой группы умножителей, первые входы которых соединены с выходами вышеназванных датчиков, а выходы - с соответствующими входами сумматора (Афанасьев А.Ю., Тарасова И.Т. Устройство оценивания параметров электродвигателя, патент РФ 2030088, МПК6 Н02Р 5/06, опубл. 27.02.95. Бюл. № 6) - [2].
Недостатком известного устройства являются ограниченные функциональные возможности - оценивание лишь трех параметров, что не позволяет осуществить эффективное управление электродвигателем при изменении его параметров.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в расширении функциональных возможностей - дополнительное оценивание момента инерции и статического момента нагрузки, что позволяет реализовать эффективное управление электродвигателем при изменении его параметров, например, модальное или адаптивное управление.
Технический результат достигается тем, что в устройство оценивания параметров электродвигателя, содержащее датчики тока, его производной и частоты вращения выходного вала, сумматор, формирователь сигнала ошибки по напряжению, первую и вторую группы по три умножителя, три масштабирующих устройства, три интегратора, входы которых через масштабирующие устройства соединены с выходами второй группы умножителей, второй вход формирователя сигнала ошибки по напряжению подключен к выходу сумматора, а выход соединен со вторыми входами второй группы умножителей, первые входы которых соединены с выходами датчиков тока, его производной и частоты вращения вала электродвигателя соответственно, входы двух первых датчиков соединены с якорной цепью электродвигателя, а третий датчик механически соединен с валом электродвигателя, выходы первого-третьего интеграторов соединены со вторыми входами первой группы умножителей соответственно, первые входы которых соединены с выходами вышеназванных датчиков соответственно, а выходы - с соответствующими входами сумматора, введены датчики напряжения и углового ускорения вала двигателя, второй сумматор, седьмой-девятый умножители, четвертый-пятый масштабирующие устройства и четвертый-пятый интеграторы, входы которых через четвертый-пятый масштабирующие устройства соединены с выходами девятого умножителя и второго сумматора соответственно, а их выходы соединены со вторым входом восьмого умножителя и третьим входом второго сумматора соответственно, первый инвертирующий и второй входы которого соединены с выходами седьмого-восьмого умножителей соответственно, первый-второй входы седьмого умножителя соединены с выходами датчика тока и третьего интегратора соответственно, датчик углового ускорения механически связан с валом электродвигателя, выход этого датчика подключен к первым входам восьмого-девятого умножителей, второй вход последнего соединен с выходом второго сумматора, вход двигателя подключен к входу датчика напряжения, выход которого подключен к первому входу формирователя сигнала ошибки по напряжению.
На фиг.1 представлена функциональная схема устройства оценивания параметров электродвигателя.
На фиг.2 показаны графики переходных процессов оценивания параметров r, L, c, J, M.
На фиг.3 приведены фазовые траектории на плоскости r-c.
На фиг.4 приведены фазовые траектории на плоскости J-M.
Схема (фиг.1) содержит электродвигатель 27, параметры которого подлежат оцениванию, датчик 1 напряжения, датчик 2 тока, датчик 3 производной от тока, датчик 4 частоты вращения, датчик 5 углового ускорения, умножители 6-14, сумматоры 15, 28, формирователь 16 сигнала ошибки по напряжению, масштабирующие устройства 17-21, интеграторы 22-26.
Вход электродвигателя 27 подключен к входу датчика 1 напряжения, входы датчика 2 тока и датчика 3 производной от тока соединены с якорной цепью электродвигателя, датчик 4 частоты вращения и датчик 5 углового ускорения механически соединены с валом электродвигателя. Выходы датчиков 2-5 соединены с первыми входами обеих групп умножителей 6-9 и 11-14 соответственно, выход датчика 2 соединен также с первым входом умножителя 10, второй вход которого соединен с выходом интегратора 24. Выходы умножителей 6-8 соединены с входами сумматора 15, выход которого соединен со вторым входом формирователя 16 сигнала ошибки по напряжению, первый вход которого соединен с выходом датчика напряжения 1. Выход формирователя 16 сигнала ошибки по напряжению соединен со вторыми входами умножителей 11-13, выходы которых через масштабирующие устройства 17-19 соединены с входами интеграторов 22-24, выходы которых соединены со вторыми входами умножителей 6-8 соответственно. Выходы умножителей 10, 9 соединены соответственно с первым инвертирующим и вторым входами сумматора 28, третий вход которого соединен с выходом интегратора 26, выход сумматора 28 соединен с входом интегратора 26 через масштабирующее устройство 21 и со вторым входом умножителя 14, выход которого соединен через масштабирующее устройство 20 с входом интегратора 25, выход которого соединен со вторым входом умножителя 9.
Устройство оценивает параметры электродвигателя постоянного тока с независимым возбуждением. Уравнения баланса напряжений и баланса моментов имеют вид:


где r0 - активное сопротивление обмотки якоря, L0 - индуктивность обмотки якоря;
c0 - коэффициент ЭДС и момента, J0 - суммарный момент инерции, M0 - статический момент нагрузки; ω - частота вращения ротора двигателя; ω'=dω/dt - угловое ускорение, u0 - напряжение на якоре, i - ток якоря; i'=di/dt - производная тока якоря. Оценки параметров будем обозначать буквами без индексов - r, L, c, J, M. Эти оценки в произвольный момент времени отличаются от истинных значений параметров. Поэтому имеются невязки - отклонения


которые в процессе идентификации должны стремиться к нулю. Введем две функции невязок:


Согласно градиентному методу оптимизации определим скорости изменения оценок параметров выражениями:
Здесь положительные коэффициенты µr, µL, µc, µJ, µM определяют скорости изменения оценок параметров и выбираются согласно характеру сигналов i(t), i'(t), ω(t), ω'(t) и общим требованиям к устройству оценки параметров электродвигателя.
Устойчивость процесса идентификации устанавливается с помощью функций Ляпунова


производные которых по времени в силу уравнений движения (7) удовлетворяют соотношениям

Из соотношения (10) следует, что при Δu≠0 Fu→0, т.е.
r→r0, L→L0, c→c0,
а из соотношения (11) - что при |ΔM|>ε FM→0, т.е. J→J0, М→M0.
Искомые оценки параметров r, L, c, J, M получаются в результате интегрирования уравнений (7) при произвольных начальных условиях.
Устройство работает следующим образом. В процессе функционирования электродвигателя 27 датчики 1-5 вырабатывают сигналы u, i, i', ω и ω', пропорциональные величинам напряжения, тока, его производной, частоте вращения и углового ускорения вала электродвигателя. Умножители 6-10 формируют произведения ri, Li', cω, ci, Lω'. На выходе сумматора 15 формируется сигнал u в соответствии с уравнением (3). Сигнал u поступает на второй вход формирователя 16 сигнала ошибки по напряжению, где он сравнивается с сигналом u0. Сигнал ошибки (невязки) Δu умножается на сигналы i, i', ω на умножителях 11-13. Полученные произведения Δui, Δui', Δuω масштабируются устройствами 17-19, настроенными на коэффициенты µr, µL, µc соответственно, а затем интегрируются интеграторами 22-24, выходные сигналы которых поступают на вторые входы умножителей 6-8 соответственно, а также выходной сигнал интегратора 25 поступает на второй вход умножителя 10.
Выходной сигнал M интегратора 26 поступает на третий вход сумматора 28, первый и второй входы которого соединены с выходами умножителей 10, 9, на его выходе формируется сигнал ΔМ в соответствии с уравнением (4). Сигнал ошибки (невязки) ΔM умножается на ω' умножителем 14, полученное произведение ΔM ω' и сама невязка ΔM масштабируются устройствами 20, 21, настроенными на коэффициенты µJ, µM соответственно, а затем интегрируются интеграторами 25-26.
На выходах интеграторов 22-26 формируются текущие значения оценок r, L, c, J, M, которые являются выходными сигналами устройства оценивания. В начальный момент времени t=0 величины r, L, c, J, M могут быть установлены произвольными в некоторых пределах, в том числе равными нулю.
Моделирование процесса идентификации параметров электродвигателя на ПЭВМ с помощью программы MatLab.7 подтвердило работоспособность и эффективность устройство оценивания. В программе приняты следующие истинные значения параметров:
r0=0,9 Ом, L0=0,2 Гн, с0=2 В·с, J0=1,1 кг·м2, М0=1,5 Н·м.
Напряжение якоря изменялось по закону u0=5+10 sin(t).
На фиг.2 приведены графики сигналов r(t), L(f), c(t), J(f), M(t) при начальных условиях
r(0)=1,6 Ом, L(0)=1,2 Гн, c(0)=3 В·с, J(0)=2 кг·м2, М(0)=2,4 Н·м.
При t→∞ эти оценки, как видно на фиг.2, стремятся к вышеуказанным истинным значениям параметров по колебательным характеристикам.
На фиг.3 приведены фазовые траектории на плоскости r-c при различных сочетаниях начальных значений этих параметров
r(0)=0,4; 0,7; 1,1; 1,4 Ом; c(0)=1; 2; 3 В·с.
Траектории имеют характерные колебания и стремятся к точке истинных значений параметров (r0=0,9; c0=2) при t→∞.
На фиг.4 приведены фазовые траектории на плоскости J-M при различных сочетаниях начальных значений этих параметров
J(0)=0,7; 0,9; 1,1; 1,3 кг·м2; M(0)=0,5; 2,5 Н·м.
Траектории имеют характерные колебания, и при t→∞ они стремятся к точке истинных значений параметров (J0=0,9; M0=2).
Использование данного устройства в автоматизированном электроприводе позволяет увеличить число оцениваемых параметров электропривода без заметного увеличения объема вычислений и усложнения устройства, что допускает реализацию модального или адаптивного управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2400918C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 1991 |
|
RU2030088C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2392731C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ И ПРОЦЕССОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2543495C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2426219C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2718708C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
Изобретение относится к автоматизированному электроприводу, в частности к автоматизированной идентификации параметров электропривода, и может найти применение в адаптивных и самонастраивающихся системах. Технический результат, на достижение которого направлено заявляемое изобретение, заключается в расширении функциональных возможностей - дополнительная идентификация момента инерции и статического момента нагрузки. Устройство оценивания параметров электродвигателя содержит датчик напряжения, датчик тока, датчик производной от тока, датчик угловой скорости, датчик углового ускорения, умножители, сумматоры, формирователь сигнала ошибки, масштабирующие устройства, интеграторы. Благодаря введению сумматора, трех умножителей, датчиков углового ускорения и напряжения, двух масштабирующих устройств и двух интеграторов получено устройство, формирующее дополнительные оценки момента инерции и статического момента нагрузки без заметного увеличения объема вычислений и усложнения устройства. 4 ил.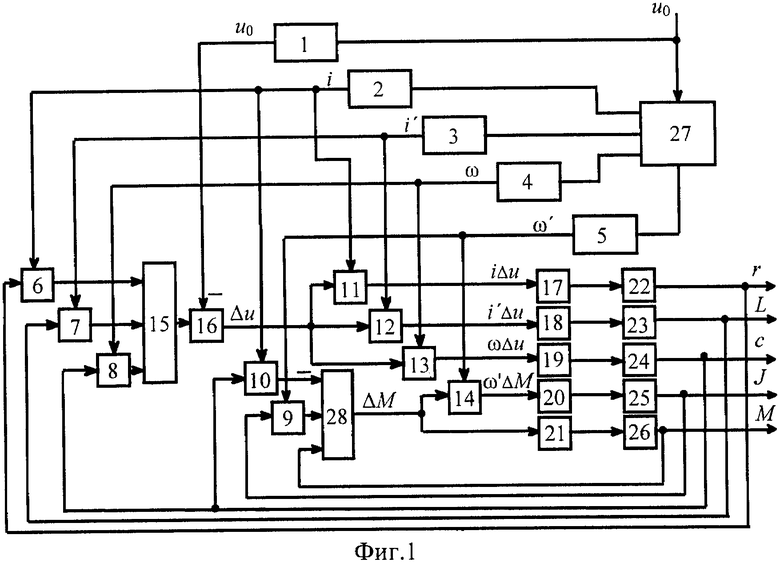
Устройство оценивания параметров электродвигателя, содержащее датчики тока, его производной и частоты вращения вала электродвигателя, сумматор, формирователь сигнала ошибки по напряжению, первую и вторую группы по три умножителя, три масштабирующих устройства, три интегратора, входы которых через масштабирующие устройства соединены с выходами второй группы умножителей, второй вход формирователя сигнала ошибки по напряжению подключен к выходу сумматора, а выход соединен со вторыми входами второй группы умножителей, первые входы которых соединены с выходами датчиков тока, его производной и частоты вращения выходного вала электродвигателя соответственно, входы двух первых датчиков соединены с якорной цепью электродвигателя, а третий датчик механически соединен с валом электродвигателя, выходы первого-третьего интеграторов соединены со вторыми входами первой группы умножителей, соответственно, первые входы которых соединены с выходами вышеназванных датчиков соответственно, а выходы - с соответствующими входами сумматора, отличающееся тем, что введены датчик напряжения, датчик углового ускорения, механически связанный с валом электродвигателя, второй сумматор, седьмой-девятый умножители, четвертый-пятый масштабирующие устройства и четвертый-пятый интеграторы, входы которых через четвертый-пятый масштабирующие устройства соединены с выходами девятого умножителя и второго сумматора соответственно, а их выходы соединены со вторым входом восьмого умножителя и третьим входом второго сумматора соответственно, первый инвертирующий и второй входы которого соединены с выходами седьмого-восьмого умножителей соответственно, первый-второй входы седьмого умножителя соединены с выходами датчика тока и третьего интегратора соответственно, выход датчика углового ускорения подключен к первым входам восьмого-девятого умножителей, второй вход последнего соединен с выходом второго сумматора, вход электродвигателя подключен к входу датчика напряжения, выход которого подключен к первому входу формирователя сигнала ошибки по напряжению.
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 1991 |
|
RU2030088C1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |
| Электропривод постоянного тока с оптимальным управлением | 1986 |
|
SU1471274A1 |
| Способ восстановления азотированных коленчатых валов | 1988 |
|
SU1638200A1 |

