Изобретение относится к точному приборостроению и может быть использовано, например, для обследования (инклинометрии) скважин. Обследование обсадной скважины в последовательных точках означает определение углов вертикали и азимута скважины в каждой точке остановки бура.
Известен способ определения азимута обсадной скважины в последовательных точках посредством гироскопического инклинометра, включающий в себя последовательные операции: горизонтирование трехстепенного гироскопа, определения угла между осью инклинометра и вектором кинетического момента трехстепенного гироскопа, т.е. угла азимута, и преобразования этого угла в электрический сигнал посредством индукционного датчика.
Известен гироскопический инклинометр, включающий устройство определения вертикали места на базе маятника со съемом угла от индукционного датчика; устройство определения азимута скважины на базе трехстепеннего гироскопа с системой горизонтирования со съемом угла от индукционного датчика. Недостатком инклинометра является наличие ошибок в определении азимута скважины от дрейфа трехстепенного гироскопа, от ошибок индукционного датчика. Дрейф трехстепенного гироскопа складывается из собственного дрейфа гироскопа и из прецессионного движения гироскопа от момента трения на азимутальной оси (ось Z, совпадающая с продольной осью инклинометра), на которой установлен также ротор индукционного датчика. В известном инклинометре ошибка в определении азимута от влияния дрейфа гироскопа имеет возрастающий во времени характер.
Цель изобретения - повышение точности определения азимута скважины за счет устранения погрешности от дрейфов гироскопов.
Предлагаемый способ определения азимута скважины в последовательных точках посредством гироскопического инклинометра включает известные операции:
- измеряют ускорение силы тяжести по трем взаимно перпендикулярным осям;
- измеряют угловую скорость по тем же осям посредством двух трехстепенных гироскопов;
- вычисляют азимут скважины; и включает новые (предлагаемые) операции:
- корпус каждого гироскопа устанавливают последовательно в положения 0о и 180о;
- угловую скорость измеряют в каждом из этих положений;
- угловую скорость Земли по трем взаимно перпендикулярным осям ωx, ωy, ωz определяют как полуразность измеренных угловых скоростей при положениях корпусов гироскопов 0о и 180о;
- азимут скважины вычисляют по формуле
Ψ = arctg (1) где gx, gy, gz - значения ускорения по трем взаимно перпендикулярным осям X, Y, Z;
(1) где gx, gy, gz - значения ускорения по трем взаимно перпендикулярным осям X, Y, Z;
g2 = gx2 + gy2 + gz2;
ωx, ωy, ωz - угловая скорость Земли по трем взаимно перпендикулярным осям;


 ,
,  ,
,  ,
,  ,
,  ,
,  - значения угловой скорости по трем взаимно противоположным осям X, Y, Z в положениях корпусов обоих гироскопов 0о и 180о;
- значения угловой скорости по трем взаимно противоположным осям X, Y, Z в положениях корпусов обоих гироскопов 0о и 180о;
P = gx ˙ ωx + gy ˙ ωy + gz ˙ ωz.
Поясним новые (предлагаемые) операции подробнее.
Корпус каждого гироскопа устанавливают последовательно в положения 0о и 180о, т. е. осуществляют разворот каждого гироскопа вокруг собственной оси симметрии, совпадающей с линией вектора кинетического момента. Угловую скорость измеряют в каждом из этих положений.
Измеренное значение угловой скорости по трем взаимно противоположным осям X, Y, Z в положение корпусов обоих гироскопов 0о и 180о будет равно:


 (2)
(2)

 (3) где
(3) где  ,
,  ,
,  ,
,  ,
,  ,
,  - значения угловой скорости (показания трехстепенных гироскопов) по трем взаимно противоположным осям X, Y, Z в положениях корпусов обоих гироскопов 0о и 180о;
- значения угловой скорости (показания трехстепенных гироскопов) по трем взаимно противоположным осям X, Y, Z в положениях корпусов обоих гироскопов 0о и 180о;
ωx, ωy, ωz - проекция угловой скорости Земли на оси X, Y, Z;
ωxдр, ωyдр, ωzдр - дрейф гироскопов по осям X, Y, Z.
Уравнения (2) и (3) основаны на следующем:
- поворот корпуса гироскопа на 180о вызывает смену знака в измеренном значении угловой скорости Земли;
- поворот корпуса гироскопа на 180о не изменяет величину и знак собственного дрейфа в показаниях гироскопа;
- дрейф гироскопа на коротком промежутке времени достаточно стабилен.
Так как ни вектор кинетического момента, ни вектор угловой скорости Земли не меняют знака, то датчиком момента прецессии гироскопа должен создаваться один и тот же момент независимо от положения 0о или 180окорпуса гироскопа.
Смена знака в измеренном значении угловой скорости Земли ωx, ωy, ωz (уравнения 2, 3) объясняется тем, что поворот корпуса гироскопа на 180о приводит к развороту каждого датчика момента прецессии гироскопа тоже на 180о.
Для сохранения неизменным вектора момента при развороте корпуса гироскопа на 180о в каждом датчике момента произойдет смена знака тока, т.е. смена знака показаний гироскопа от угловой скорости Земли.
При повороте корпуса гироскопа на 180о вектор угловой скорости дрейфа гироскопа, как принадлежность корпуса гироскопа, меняет свое направление на 180о, при этом и датчик момента, на котором формируется момент парирующий дрейф, также поворачивается на 180о. Таким образом, изменению в знаке подвергаются два параметра: угловая скорость и момент, поэтому величина и знак угловой скорости дрейфа в показаниях гироскопов не изменяются при положениях корпуса гироскопа в положениях 0о и 180о.
Из уравнений (2) и (3) получим выражения для угловой скорости Земли в осях X, Y, Z:


 (4)
(4)
Таким образом угловую скорость Земли по трем взаимно перпендикулярным осям ωx, ωy, ωz определяют как полуразность измеренных угловых скоростей при положении корпусов гироскопов 0о и 180о.
Покажем, что информации об угловой скорости Земли в осях трехгранника X, Y, Z, информации об ускорении силы тяжести в тех же осях достаточно для вычисления угла азимута скважины при произвольном угловом положении инклинометра.
Краткий вывод формулы (1) определения азимута скважины по информации об ускорении силы тяжести, по информации об угловой скорости Земли следующий.
Постановка задачи:
Пусть в трехмерной декартовой системе координат ζ, η, ϕ заданы два вектора:
a)a)  =
=  o,o;g
o,o;g где |g| = 9,8 м/с2 - вектор ускорения свободного падения (вектор силы тяжести);
где |g| = 9,8 м/с2 - вектор ускорения свободного падения (вектор силы тяжести);
б)б)  =
= , ωη,
, ωη,  - вектор угловой скорости Земли.
- вектор угловой скорости Земли.
И пусть имеется вектор  (направление бурения в данной точке скважины) с произвольной ориентацией.
(направление бурения в данной точке скважины) с произвольной ориентацией.
С вектором  связана местная система координат (X, Y, Z) такая, что ось Z направлена по вектору
связана местная система координат (X, Y, Z) такая, что ось Z направлена по вектору  , положение оси X произвольно, ось Y перпендикулярна X и Z.
, положение оси X произвольно, ось Y перпендикулярна X и Z.
В местной системе координат измерены проекции векторов =
= gx, gy, g
gx, gy, g (5)
(5) =
= , ωy,
, ωy,  (6)
(6)
Требуется определить угол Ψ между проекциями =
=  , ωη,o
, ωη,o и
и  =
= vζ, vη, o
vζ, vη, o на плоскость горизонта векторов
на плоскость горизонта векторов  и
и  .
.
Угол Ψ и есть искомый азимут скважины.
Все построения будем вести в местной системе координат |o; x; y; z|.
Уравнение плоскости горизонта, проходящей через начало координат (0; 0; 0) и перпендикулярной  , будет иметь вид:
, будет иметь вид:
gz ˙ X + gy ˙ Y + gz ˙ Z = 0 (7)
Определим проекции  на эту плоскость, т.е.
на эту плоскость, т.е.  .
.
Из точки |ωx, ωy, ωz| проведем прямую, перпендикулярную плоскости горизонта, параллельную вектору тяжести  =
= gx; gy; g
gx; gy; g , выраженную уравнением 8.
, выраженную уравнением 8.
 =
=  =
=  (8)
(8)
Откуда: 



 (9) Найдем точку пересечения этой прямой (9) с плоскостью горизонта, подставив значения X, Y, Z (9) в уравнением плоскости горизонта (7)
(9) Найдем точку пересечения этой прямой (9) с плоскостью горизонта, подставив значения X, Y, Z (9) в уравнением плоскости горизонта (7)
gx˙ (ωx + Kgx) + gy˙(ωy + Kgy)+ gz˙(ωz + Kgz) = 0 (10) Откуда K = -  = -
= -  (11)
(11)
Подставим (11) в уравнения прямой (9):





 (12) И так проекция
(12) И так проекция  на плоскость горизонта, т.е.
на плоскость горизонта, т.е.  , будем иметь выражение (13):
, будем иметь выражение (13): =
= -
-  ·P; ωy -
·P; ωy -  ·P; ω2 -
·P; ω2 -  ·P
·P (13)
(13)
Проекция вектора  = (0,0,1) на плоскость горизонта, т.е.
= (0,0,1) на плоскость горизонта, т.е.  определяется аналогично (13) подстановкой ωx = 0, ωy = 0, ωz = 1
определяется аналогично (13) подстановкой ωx = 0, ωy = 0, ωz = 1 =
= -
-  ; -
; -  ; 1 -
; 1 -  (14)
(14)
Таким образом имеет два вектора  и
и  , которые являются проекциями векторов
, которые являются проекциями векторов  и
и  на плоскость горизонта.
на плоскость горизонта.
Требуется определить угол азимута, т.е. угол между векторами  и
и  .
.
Воспользуемся формулами для двух векторов  и
и  .
.
Скалярное произведение равно:



 (15)
(15)
Модуль векторного произведения равен:

 (16)
(16)
Объединяя выражения (15) и (16), полу- чим (17)
tgΨ =  (17)
(17)
Применительно к инклинометру ax, ay, az, bx, by, bz равны:
 (18)
(18)
Подставляя значения ax, ay, az, bx, by, bz в выражение (17) и упростив его, получим формулу (1) определения азимута скважины.
Таким образом способ определения азимута скважины в последовательных точках посредством гироскопического инклинометра достигает цели - повышения точности определения азимута скважины за счет устранения погрешности от дрейфов гироскопов.
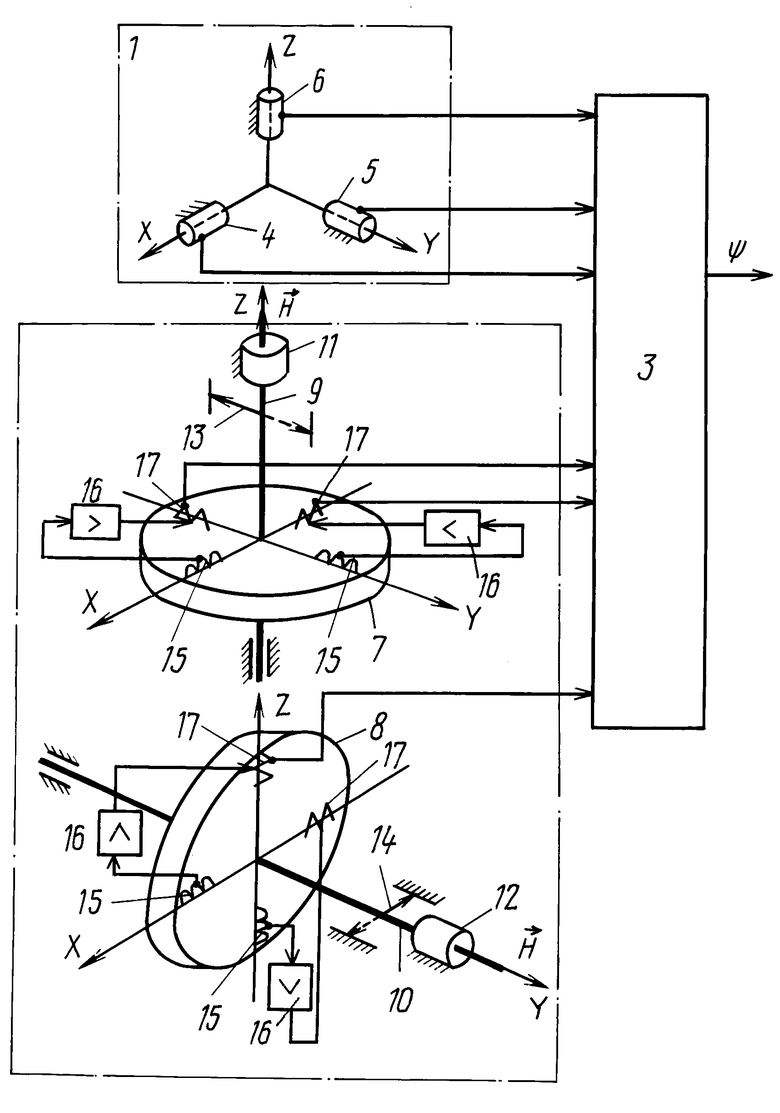
На чертеже показан предполагаемый гироскопический инклинометр, использующий в основе предлагаемый способ определения азимута скважины в последовательных точках.
Гироскопический инклинометр содержит устройство для измерения ускорения 1 по трем взаимно перпендикулярным осям X, Y, Z, устройство для измерения угловой скорости 2 по тем же осям на базе двух трехстепенных гироскопов 7, 8; вычислитель 3, подключенный к выходам обоих устройств 1, 2. Возможной реализацией устройства для измерения ускорения по трем взаимно перпендикулярным осям может быть триада акселерометров 4, 5, 6, точность определения ускорения которых за счет глубокой обратной связи значительно выше, чем маятника, подвешенного в жидкости. В устройстве 2 каждый трехстепенный гироскоп 7, 8 охвачен двумя внутренними отрицательными обратными связями, каждая из которых включает последовательно соединенные датчик угла 15 по измерительной оси гироскопа, усилитель 16 и датчик момента 17 по перпендикулярной к датчику угла 15 оси. Выходы измерителей ускорения и угловой скорости подключены к шести входам вычислителя 3 азимута.
С целью повышения точности определения азимута скважины за счет устранения погрешности от дрейфов гироскопов измеритель угловой скорости 2 дополнительно снабжен двумя поворотными осями 9, 10; двумя исполнительными механизмами 11, 12; двумя упорами 13, 14, причем исполнительные механизмы 11, 12 и упоры 13, 14 установлены по одному на каждой поворотной оси 9, 10 с возможностью поворота корпуса гироскопа 7, 8, вокруг поворотной оси 9, 10 и длительного удержания его (гироскопа) в положениях 0о и 180о. Каждая поворотная ось 9, 10 жестко прикреплена к корпусу 7, 8, соответствующего гироскопа, соединяет его с корпусом инклинометра и совпадает по направлению с линией вектора кинетического момента  соответствующего гироскопа.
соответствующего гироскопа.
Работает инклинометр следующим образом.
При движении спускаемого аппарата (инклинометра) вдоль скважины он находится во включенном состоянии и выдерживает все механические нагрузки. В пункте остановки бура устройство 1 измеряет ускорение силы тяжести в осях трехгранника X, Y, Z, устройство 2 производит измерение угловой скорости в тех же осях в положении корпуса 7, 8 каждого гироскопа 0о, а затем повторяет измерение в положении корпуса каждого гироскопа 180о. Вычислитель 3 осуществляет операцию вычисления по формуле (1). Поворот корпуса каждого гироскопа и длительное удержание в положении 0о и 180о осуществляется вокруг поворотной оси 9, 10 исполнительным механизмом 11, 12 и упорами 13, 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА В ТОЧКЕ ОСТАНОВА | 1993 |
|
RU2062872C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ОБЪЕКТА | 1994 |
|
RU2079844C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1992 |
|
RU2057291C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 1995 |
|
RU2087866C1 |
| СПОСОБ НАСТРОЙКИ ИНКЛИНОМЕТРА И КОНТРОЛЯ ДОСТОВЕРНОСТИ РЕЗУЛЬТАТОВ | 1994 |
|
RU2085852C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1995 |
|
RU2098766C1 |
| КУРСОВЕРТИКАЛЬ | 1994 |
|
RU2087865C1 |
| ГИРОИНКЛИНОМЕТР | 1994 |
|
RU2078204C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ДВУХКАНАЛЬНОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2000 |
|
RU2176780C1 |
Назначение: изобретение относится к точному приборостроению и может быть использовано для обследования скважин. Сущность изобретения: способ основан на измерении ускорения силы тяжести и угловой скорости по трем взаимно перпендикулярным осям. Измерение угловой скорости осуществляют с помощью двух трехстепенных гироскопов, корпуса которых последовательно устанавливают в положения 0° и 180°. Затем определяют угловую скорость Земли как полуразность измеренных угловых скоростей при положениях корпусов гироскопов 0° и 180°. Азимут скважины вычисляют с учетом измеренных величин по приведенной математической зависимости. Инклинометр для осуществления способа содержит измерители ускорения по трем взаимно перпендикулярным осям и угловой скорости по тем же осям на базе двух трехстепенных гироскопов, подключенные выходами к вычислителю азимута скважины. Дополнительно для осуществления поворота корпуса гироскопа измеритель угловой скорости снабжен двумя поворотными осями, двумя исполнительными механизмами и двумя упорами. 2 с.п. ф-лы, 1 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР.
Способ определения азимута скважины в последовательных точках посредством гироскопического инклинометра, включающий измерение ускорения силы тяжести по трем взаимно перпендикулярным осям, измерение угловой скорости по тем же осям посредством двух трехстепенных гироскопов и вычисление азимута скважины, отличающийся тем, что, с целью повышения точности определения азимута скважины за счет устранения погрешности от дрейфов гироскопов, устанавливают корпус каждого гироскопа последовательно в положения 0o и 180o и угловую скорость измеряют в каждом из этих положений гироскопов, угловую скорость Земли по трем взаимно перпендикулярным осям ωx, ωy и ωz определяют как полуразность измеренных угловых скоростей при положениях корпусов гироскопов 0o и 180o, а азимут скважины Ψ вычисляют по формуле
где gx, gy, gz - значения ускорения по трем взаимно перпендикулярным осям x, y, z;
g2= g
ωx, ωy, ωz - угловая скорость Земли по трем взаимно перпендикулярным осям:
 - значения угловой скорости по трем взаимно противоположным осям x, y, z в положениях корпусов обоих гироскопов 0o и 180o,
- значения угловой скорости по трем взаимно противоположным осям x, y, z в положениях корпусов обоих гироскопов 0o и 180o,
P = gx·ωx+ gy·ωy+ gz·ωz.
2. Гироскопический инклинометр, содержащий измеритель ускорения по трем взаимно перпендикулярным осям и измеритель угловой скорости по тем же осям, состоящий из двух трехстенных гироскопов, каждый из которых охвачен двумя внутренними отрицательными обратными связями, каждая из которых включает последовательно соединенные связями, каждая из которых включает последовательно соединенные датчик угла на измерительной оси гироскопа, усилитель и датчик момента по перпендикулярной к датчику угла оси, выходы измерителей ускорения и угловой скорости подключены к входам вычислителя азимута, отличающийся тем, что, с целью повышения точности определения азимута скважины за счет устранения погрешности от дрейфов гироскопов, измеритель угловой скорости снабжен двумя поворотными осями, двумя исполнительными механизмами и двумя упорами, причем исполнительные механизмы и упоры установлены по одному на каждой поворотной оси с возможностью поворота корпуса гироскопа вокруг поворотной оси длительного удержания его в положениях 0o и 180o, а каждая поворотная ось жестко прикреплена к корпусу соответствующего гироскопа, соединяет его с корпусом инклинометра и совпадает по направлению с линией вектора кинетического момента соответствующего гироскопа.
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
