Изобретение относится к точному приборостроению, преимущественно гироскопическому и может быть использовано при создании гирокомпасов и курсоуказывающих устройств аналитического типа.
Известен способ определения истинного курса с помощью гироскопического датчика угловой скорости (Б.И. Назаров и Г.А. Хлебников, "Гиростабилизаторы ракет", М. 1975, с.193-196), согласно которому курсовое направление измерительной оси гироскопа определяют аналитически путем вычислений по результатам измерений горизонтальной составляющей угловой скорости вращения Земли. С целью повышения точности определения курса применяют методы, направленные на уменьшение дрейфа гироскопа. Так, гироскопический датчик угловой скорости, измерительная ось которого расположена в плоскости горизонта, поворачивают на разные азимутальные углы и снимают на этих углах выходную информацию с гироскопа в виде электрического напряжения с эталонного сопротивления, стоящего в цепи обратной связи. На основе того, что ряд вредных моментов гироскопа, не связанных с его корпусом, меняет знак при разворотах его в азимуте, разработаны известные методы, которые позволяют выполнить взаимную компенсацию этих вредных моментов. Однако эти известные методы автокомпенсации не позволяют полностью исключить курсовую погрешность от вредных моментов гироскопа, а также от других источников, например, невыставки осей чувствительности гироскопа в горизонте.
За прототип взят способ определения истинного курса с помощью гироскопического датчика угловой скорости, основанный на его аналитическом вычислении (S.P. Redkin, "Analytical gyrocompassing by angular rate sensor based on dynamically tuned gyro", in Saint Petersburg International Conference on Gyroscopic Technology, may 1994). В этом способе проводят предварительную настройку по выставке измерительных осей гироскопа в горизонт и привязке их к продольной оси объекта, включают гироскоп в режим работы с обратной связью по току датчика момента, определяют сигнал с эталонного сопротивления датчика угловой скорости в первом положении на угле измеряемого курса, поворачивают гироскоп в азимуте во второе положение вокруг собственной оси на 180o, а затем в третье положение на 90o и измеряют сигналы с гироскопа на этих углах, после чего искомый угол находят аналитически с использованием значений сигнала с эталонного сопротивления, полученных на этих углах с помощью следующего соотношения
где Ux1, Ux2, Ux3 напряжения с эталонного сопротивления датчика угловой скорости соответственно в первом, втором и третьем положениях.
Существующий способ определения истинного курса позволяет произвести автокомпенсацию ряда погрешностей, обусловленных систематическими составляющими моментов, не связанных с корпусом гироскопа. Однако в данном способе не компенсируются вредные моменты в гироскопе, которые связаны с его корпусом. При поворотах происходит изменение моментов, не связанных с корпусом, которые тоже не компенсируются и обуславливают погрешность определения курса. Также этот известный способ не компенсирует погрешность определения курса обусловленную погрешностью выставки в горизонт осей чувствительности гироскопа. Погрешность определения курса в известном способе, реализованном с помощью ДУС на базе динамически настраиваемого гироскопа (ДНГ), в соответствия с исследованиями, проведенными в указанной выше статье S.P. Redkin, можно представить в следующем виде
Δψ погрешность определения курса;
j угол истинного курса;
n, κ углы тангажа и крена;
aБ, βБ, γБ - углы, характеризующие погрешность установки корпуса гирокомпаса на базе ДУС на объекте;
αНП, βНП, γНП - углы, характеризующие погрешность установки поворотной платформы гироскопа в корпусе гирокомпаса,
U угловая скорость вращения Земли;
v широта места;
K* остаточная жесткость ДНГ;
d1,,δ2, δ3 погрешность определения углов поворота платформы с гироскопом;
Kу коэффициент усиления контура обратной связи гироскопа,
Kу=Кдм•Кус•Кду,
Kду крутизна датчика угла гироскопа;
Kус коэффициент усиления усилителя обратной связи;
Kдм крутизна датчика момента гироскопа,
λ = TД + nNД,
TD момент сил аэродинамического сопротивления вращению ротора;
D коэффициент демпфирования;
n количество карданных рамок ДНГ;
N скорость вращения ротора гироскопа;
H1 кинетический момент гироскопа;
ΔM
ΔM
ΔM
ΔM
rz смещение центра масс ротора гироскопа вдоль оси собственного вращения;
g ускорение свободного падения.
В соответствии с выражением (1) была раcсчитана погрешность определения курса при следующих типичных параметрах.
H1 180 гсмс, K* 0,3 гсм/рад, Kу 200 гсм/рад, rzg 8,6•10-4 гсм,
На фиг. 1 показана теоретическая зависимость погрешности определения курса от курсового угла, полученная при этих параметрах.
Из зависимости 1, представленной на фиг.1, следует, что в известном способе определения курса имеет место существенная погрешность, обусловленная параметрами ДУС, вредными моментами по осям гироскопа, погрешностью выставки его измерительных осей в плоскость горизонта. При этом курсовая погрешность зависит гармонически от курсового угла, изменяясь в пределах трубки, ширина которой при выполненных расчетах составила Kт1 -0,00487 рад.
Целью изобретения является повышение точности определения истинного курса с помощью гироскопического датчика угловой скорости.
Цель достигается тем, что в известном способе определения истинного курса с помощью датчика угловой скорости, включающем предварительную выставку измерительных осей гироскопа в горизонт и их привязку к продольной оси объекта, работу гироскопа в режиме обратной связи по току датчика момента при операции предварительной настройки проводят фазировку системы измерения напряжения с эталонного сопротивления обратной связи гироскопа, обеспечивающую положительное приращение сигнала с эталонного сопротивления при азимутальном повороте его корпуса против часовой стрелки на 90o из положения, при котором измерительная ось направлена на Восток, а при определении курсового угла гироскоп поворачивают в азимуте относительно искомого курсового направления против часовой стрелки на 360o, при этом делают измерения углов поворота корпуса гироскопа и соответствующих этим углам напряжений с эталонного сопротивления, затем определяют значения напряжений с эталонного сопротивления в равноотстоящих по углу друг от друга положениях, угловое расстояние между которыми выбирают таким, чтобы для него угол 90o являлся кратным, и определяют значение истинного курса оси гироскопа перпендикулярной измерительной оси по формуле
где
i текущий индекс, характеризующий азимутальное положение гироскопа, 
 число угловых разбиений на промежутке [0,2π]
число угловых разбиений на промежутке [0,2π]
ΔΦ угол между равноотстоящими азимутальными положениями;
N+1 число измерений на угловом промежутке [0,2π], включая измерения на границах.
Uj Ui при j ≅ (N+1),
Uj U(i-N) при j > N+1,
j 1, (1,5N-0,5),
Ui значение напряжения с эталонного сопротивления датчика угловой скорости в азимутальном положении.
В практике определения курсового угла с помощью датчика угловой скорости измерения проводят в таких азимутальных положениях гироскопа, которые обеспечивают аналитическое вычисление курсового угла через функцию арктангенс.
где
U1 напряжение с эталонного сопротивления датчика угловой скорости в исходном положении;
U3 напряжение с эталонного сопротивления при повороте гироскопа на угол 90o.
Вычисление ψ по алгоритму (3) не требует введения в вычислитель крутизны управления гироскопа, величин эталонного сопротивления, кинетического момента, широты места, угловой скорости вращения Земли.
При использовании функции тангенса квадрант, в котором расположен курсовой угол j может быть вычислен по соотношению знаков U1 и U3. Зная квадрант, находят формулу для вычисления этого угла.
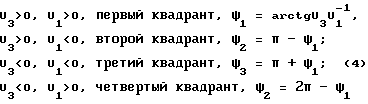
Пусть в исходном положении напряжение с эталонного сопротивления гироскопа равно U1, а в положениях, развернутых против часовой стрелки относительно исходного на 180 и 90o, равно соответственно U2 и U3. Тогда в случае использования ДУС на базе динамического настраиваемого гироскопа можно показать, что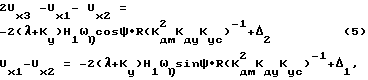
где
Δг погрешность измерения разности проекций горизонтальной составляющей скорости вращения Земли на измерительную ось гироскопа в положениях 1 и 2, обусловленная параметрами гироскопа, контура обратной связи, нескомпенсированными вредными моментами, углами невыставки измерительной оси в плоскость горизонта,
Δ2 погрешность измерения разности проекций двойной горизонтальной составляющей скорости вращения Земли на входную ось в положении 3 и суммы горизонтальных составляющих скорости вращения Земли в положениях 1 и 2, обусловленная теми же факторами, что и погрешность Δ1.
Тогда
где Δψ погрешность определения курса, обусловленная D1 и Δ2.
В предлагаемом способе на известных азимутальных углах относительно искомого направления определяют значения истинных курсовых углов, а искомый курсовой угол находят как среднее значение приведенных к искомому курсу этих найденных значений курсовых углов.
Приведенное значение курсового угла можно представить в виде
ψni = ψi - Φi + Δψi,
где
ψni - приведенное значение курсового угла, полученное с помощью измерения курса в i-м положении;
ΔΦ1 - известный азимутальный угол между искомым курсовым направлением и i-м положением;
Δψi курсовая погрешность измерения курса в i-м положении;
i индекс, характеризующий известные азимутальные положения, 
Определяя искомый курсовой угол как среднее значение приведенных курсовых углов, получим
Разворачивая гироскоп относительно исходного положения на 360o и определяя значения напряжений с эталонного сопротивления в равноотстоящих по углу друг от друга положениях, угловое расстояние между которыми выбрано таким, чтобы для него угол 90o был кратным, искомое значение угла истинного курса в соответствии с выражениями (4),(6),(8) можно определить, используя следующие соотношения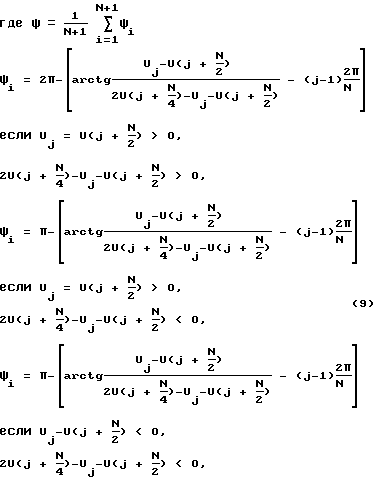
Для определения истинного курса по полученным соотношениям (9) необходимо соблюдение фазировки знака изменения сигнала с эталонного сопротивления ДУС, обусловленного изменением проекции горизонтальной составляющей скорости вращения Земли на измерительного ось гироскопа с направлением азимутального поворота его корпуса. Так при повороте корпуса гироскопа против часовой стрелки на угол 90o из положения, при котором измерительная ось направлена на Восток, приращение сигнала с эталонного сопротивления гироскопа должно быть положительным. Это обстоятельство обусловлено использованием при выводе соотношения (9) принятого в математике закона изменения функции синуса.
В рассматриваемом методе в соответствии с выражением (8) погрешность определения курса имеет вид
В предельном случае при N+1 _→ ∞ погрешность определения курса можно представить
или подставляя в (11) Δψ(ψ) в соответствии с выражением (2) получим
Применяя приближенный численный метод трапеций вычисления выражения (12) для используемых выше параметров датчики угловой скорости определялась курсовая погрешность в предлагаемом методе в зависимости от курса, которая показана на фиг.1.
Из зависимости 2, показанной на фиг.1, видно, что в предлагаемом способе курсовая погрешность при проведший измерений и приведении полученных курсовых углов в диапазоне [0,2π] стремится к нулю, в то время как в известном способе курсовая погрешность имеет определенную величину, характеризуемую зависимостью 1.
Таким образом, предлагаемый способ определения истинного курса с помощью датчика угловой скорости имеет следующие основные отличия от известного способа:
в операции предварительной настройке датчика угловой скорости указана последовательность действий по фазировке снимаемого с эталонного сопротивления сигнала и направления поворота его корпуса, что является необходимым условием для применения форельных соотношений как в известном, так и в предлагаемом способе,
искомое значение курса определяется как среднее значение приведенных курсовых, углов, определенных в угловом диапазоне [0,2π] от искомого положения, что позволяет существенно повысить точность нахождения курса за счет взаимокомпенсации погрешностей, имеющихся при определении приведенных курсовых углов в предложенном угловом диапазоне.
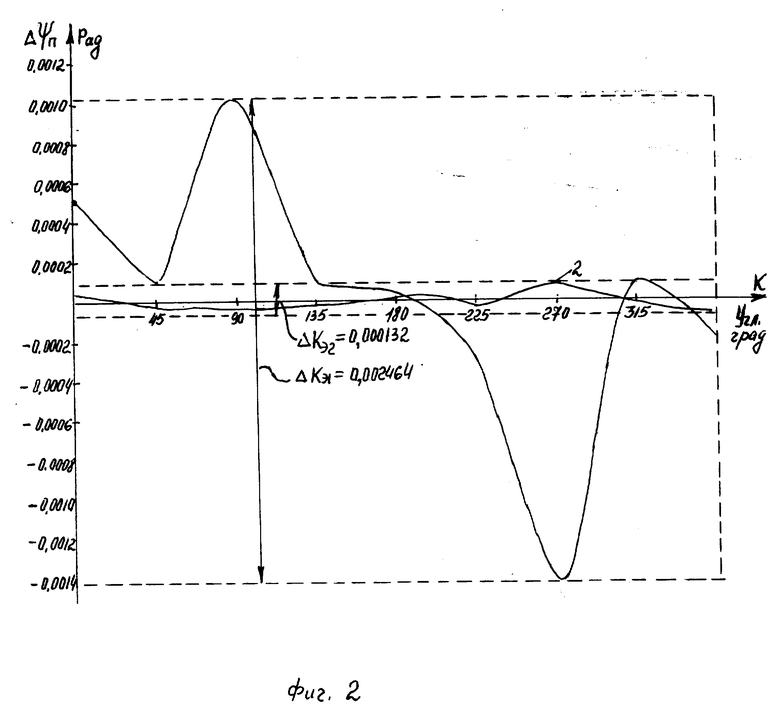
На фиг.1 показана теоретическая зависимость погрешности определения курса от курсового угла; на фиг.2 экспериментальная зависимость переменной погрешности определения курса от курсового угла.
Проводилась экспериментальная сравнительная оценка точности определения курса с помощью гироскопического датчика угловой скорости с применением известного и предлагаемого способов.
Экспериментальные исследования проводились с помощью датчика угловой скорости на базе динамически настраиваемого гироскопа ГВК-6. Динамически настраиваемый гироскоп ГВК-6 устанавливался горизонтально плоскостью своих измерительных осей на платформу оптической делительной головки с точностью задания азимутальных углов 3 угловые секунды. На платформе оптической делительной головки в исходном положении измерительные оси гироскопа ориентировались в направлении Юг-Север и Запад-Восток.
Динамически настраиваемый гироскоп работал в режиме датчика угловой скорости путем включения его в систему обратных связей по токам датчиков момента. С эталонного сопротивления, стоящего в цепи канала ДУС, измерялось напряжение с помощью компьютера с платой аналого-цифрового преобразователя. Гироскоп из исходного положения поворачивался против часовой стрелки на углы 45,90,135,180,225,270,315,360o. На каждом из этих углов производилось измерение напряжений с эталонного сопротивления. На базе полученного ряда измерений с помощью программ, реализующих известный и предлагаемые способы, определялись значения курсовых углов для каждого из сделанных азимутальных поворотов гироскопа.
Погрешность измерения курсовых углов определялась как разность измеренных курсовых углов и известных курсовых углов.
На фиг. 2 показаны экспериментальные зависимости 1,2 переменной погрешности определения курса от курсового угла соответственно в известном и предлагаемом способе.
Из сравнения этих зависимостей видно, что применение предлагаемого способа позволяет повысить точность определения истинного курса по сравнению с известным способом. Так, в известном способе при измерении курса в диапазоне углов [0,2π] курсовая погрешность изменяется в пределах трубки шириной K - 0,002464 рад, а при применении предлагаемого способа курсовая погрешность изменяется в пределах трубки K 0,000132 рад, что в 18 раз меньше.
Использование предлагаемого способа определения истинного курса с помощью датчика угловой скорости обеспечивает по сравнению с существующими способами существенное повышение точности его нахождения, что обуславливает возможность расширения областей применения гирокомпасных устройств на базе датчика угловой скорости. Так, на базе датчика угловой скорости с применением предлагаемого способа возможно создание наземного гирокомпаса, имеющего меньшие габариты, вес, стоимость по сравнению с широко применяемым наземным маятниковым гирокомпасом.
Изобретение относится к гироскопическому приборостроению и может быть использовано при создании гирокомпасов аналитического типа. Сущность изобретения: для определения угла истинного курса с помощью гироскопического датчика угловой скорости проводят предварительную фазировку сигнала с эталонного сопротивления гироскопа с направлением поворота его корпуса в азимутальной плоскости, а в рабочем режиме поворачивают гироскоп в азимуте относительно искомого курсового направления на 360o, определяют значения напряжений с эталонного сопротивления в равноотстоящих по углу друг от друга положениях, угловое расстояние между которыми выбирают таким, чтобы для него угол 90o был кратным, аналитически определяют значения курса оси гироскопа на этих углах, приводят полученные курсовые значения к искомому курсовому направлению с использованием известных азимутальных углов поворота гироскопа и искомый курс определяют как их среднее значение. 2 ил.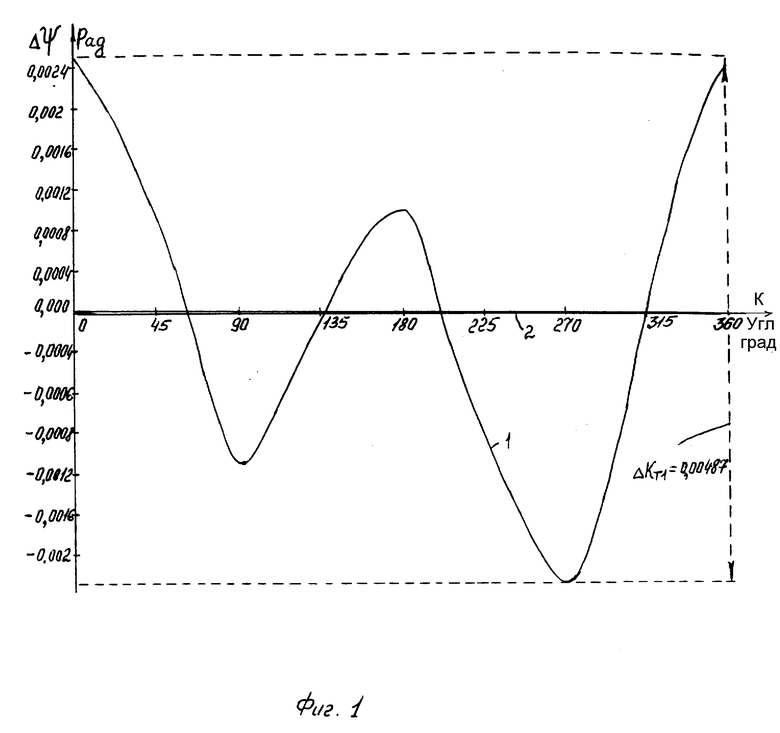
Способ определения истинного курса с помощью гироскопического датчика угловой скорости, включающий предварительную выставку измерительных осей гироскопа в горизонт и их привязку к продольной оси объекта, работу гироскопа в режиме обратной связи по току датчика момента, определение напряжений с эталонного сопротивления датчика угловой скорости на угле измеряемого курса и положениях, полученных в результате азимутального поворота гироскопа на 90o и 180o относительно искомого курсового направления, и вычисляют значение истинного курса оси гироскопа, отличающийся тем, что с помощью гироскопического датчика угловой скорости проводят предварительную фазировку системы измерения напряжения с эталонного сопротивления обратной связи гироскопа, обеспечивающую положительное приращение сигнала с эталонного сопротивления при азимутальном повороте его корпуса против часовой стрелки на 90o из положения, при котором измерительная ось направлена на Восток, а при определении курсового угла гироскоп поворачивают в азимуте относительно искомого курсового направления против часовой стрелки в равно отстоящие по углу друг от друга положения в диапазоне 0 360o, угловое расстояние между которыми выбирают таким, чтобы для него угол 90o являлся кратным, при этом измеряют углы поворота гироскопа и соответствующих этим углам напряжения с эталонного сопротивления, а значение истинного курса вычисляют по формуле
где
если
если
если
если
i текущий индекс, характеризующий азимутальное положение гироскопа,
 число угловых разбиений на промежутке [0,2π];
число угловых разбиений на промежутке [0,2π];
ΔΦ - угол между равноотстоящими азимутальными положениями;
N + 1 число измерений на угловом промежутке [0,2π], включая измерения на границах;
Uj Ui при j ≅ (N + 1);
Uj U(i N) при j > N + 1;
Ui значение напряжения с эталонного сопротивления датчика угловой скорости в i азимутальном положении.
| P | |||
| Redkin | |||
| Analytical gyrocompassing by angular rate sensor based oh dynamicatly tuned gyro | |||
| Saint Peterburg International Conterence on Gyroscopii technology | |||
| Central Scientific and Researsh Institute | |||
| Eustrooptic, May 1994, p | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
