I i i у 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Гироскопический инклинометр | 1981 |
|
SU1002551A1 |
| Инклинометр | 1984 |
|
SU1183669A1 |
| Гироскопический инклинометр | 1980 |
|
SU901485A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1995 |
|
RU2095563C1 |
| Инклинометр | 1976 |
|
SU868056A1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |
Изобретение относится к промысловой геофизике и позволяет повысить точность и надежность работы инклинометра при измерении углов искривления скважины. Гироскопический инклинометр содержит наземный блок 24 и скважинный прибор 23, блок 22 передачи информации которого связан с блоком 24. В основном корпусе прибора 23 размещен дополнительный корпус, подпружиненный в осевом направлении относительно основного корпуса. Внутри дополнительного корпуса установлены трехстепенной гироскоп с системой горизонтирования его главной оси, индукционные датчики /Д/ 4 и 14 азимутального и зенитного углов, индукционный ДЗ определения приборного азимута, вертикальный маятник и блок 22. Блок 24 выполнен в виде двух фазометров /Ф/ 29, 30 и регистратора 32, а блок 22 - в виде трех фазосдвигающих РС-цепей 25, 26, 27 и телеизмерительной системы /ТС/28. Индукционные Д 3 и 14 размещены в герметичных камерах, заполненных демпфирующей жидкостью. Выходы Д 3, 4 и 14 через РС-цепи 25, 26, 27 связаны с ТС 28, выход которой соединен с входами Ф 29 и 30. Сигналы αг с Д 4 и αк с Д 3 поступают через РС-цепи 26 и 25 в ТС 28 и Ф 29. С выхода Ф 29 сигнал αг - αк, пропорциональный гироскопическому азимуту, поступает в регистратор 32. Истинный азимут определяют добавлением к гироскопическому азимуту разности между истинным и приборным азимутами, определенной на поверхности Земли. Зенитный угол измеряют Д 14, сигнал с которого через РС-цепь 27, ТС 28 и Ф 30 поступает на регистратор 32. 1 з.п. ф-лы, 2 ил.
Ш I I LJL
размещены в герметичных камерах, заполненных демпфирующей жидкостью. Выходы Д 3, 4 и 14 через RC-цепи 25, 26, 27 связаны с ТС 28, выход которой соединен с входами Ф 29 и 30. Сигналы /г с Д 4 и с Д 3 поступают через 26 и 25 в ТС 28 и Ф 29. С выхода Ф 29 сигнал dr - d
ческому азимуту, посту тор 32. Истинный азиму добавлением к гироскоп ту разности между исти азимутами, определенно ти Земли. Зенитный уго сигнал с которого чере ТС 28 и Ф 30 поступает
к
пропорциональный гироскопи- jg 32. 1 з.п. ф-лы, 2 ил.
. Изобретение относится к промысловой геофизике и может быть использовано для измерения азимута и зенитного угла скважинf обсаженных стальными колоннами или пробуренных в породах с магнитной восприимчивостью.
Цель изобретения - повышение точности и надежности работы инклинометра.
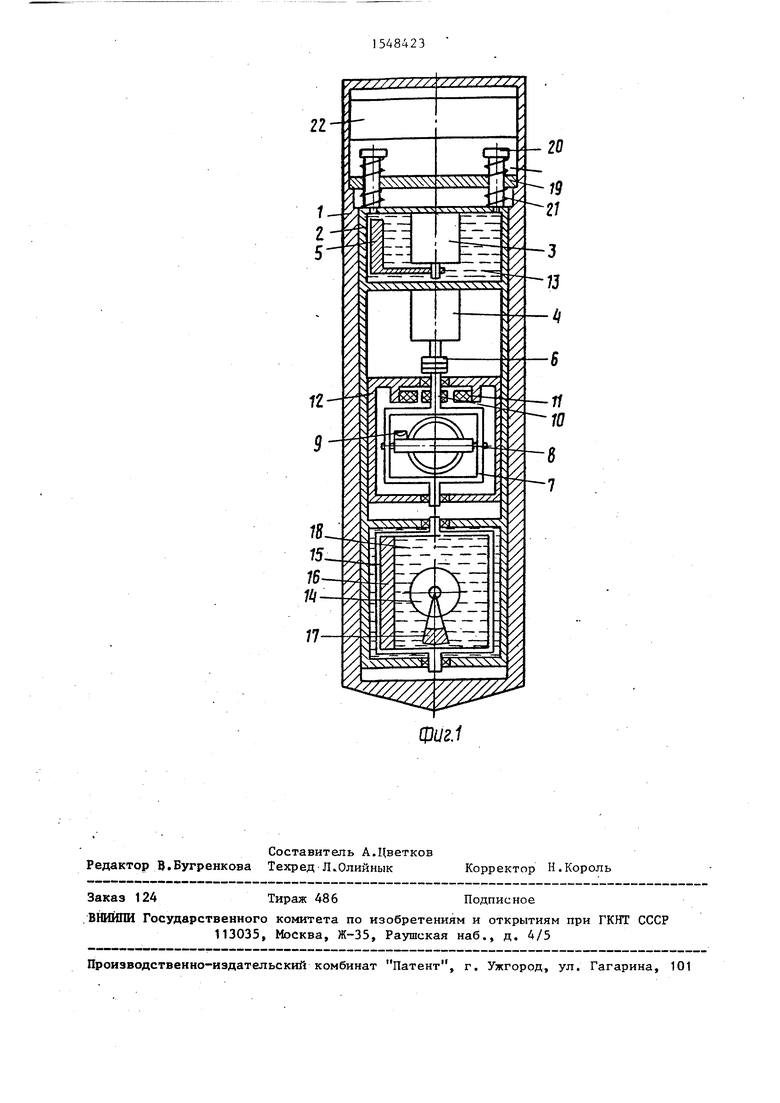
На фиг. 1 приведен скважинный при- бор инклинометра на фиг. 2 - блок- схема инклинометра.
Гироскопический инклинометр содержит скважинный прибор (фиг. 1), внутри основного герметичного корпуса 1 которого размещен дополнительный корпус 2. В корпусе 1 внутри дополнительного корпуса 2 установлены свободный трехстепенной гироскоп с системой горизонтирования его главной оси, датчик 3 определения приборного азимута, датчик 4 азимутального угла и вертикальный маятник 5. Датчики 3 и 4 выполнены индукционными в виде, например, бесконтактных синусно-коси- нусных трансформаторов (БСКТ). Вертикальный маятник 5 установлен на роторе датчика 3, а ротор датчика 4 через муфту 6 соединен с наружной рамкой 7 гироскопа. Система горизонтирования главной оси гироскопа выполнена в виде установленного на внутренней рамке 8 гироскопа жидкостного маятникового датчика 9, связанного электрически с моментным двигателем, ротор 10 ко- торого закреплен на оси наружной рамки 7, а статор 11 на корпусе 12 гироскопа. Датчик 3 с вертикальным маятником 5 размещен в герметичной камере 13, заполненной демпфирующей жидкостью. Внутри дополнительного корпуса 2 установлен также датчик 14 зенитного угла, который по аналогии с датчиками
ческому азимуту, поступает в регистратор 32. Истинный азимут определяют добавлением к гироскопическому азимуту разности между истинным и приборным азимутами, определенной на поверхности Земли. Зенитный угол измеряют Д 14, сигнал с которого через RC-цепь 27, ТС 28 и Ф 30 поступает на регистратор
5
5
Q Q с
3 и 4 выполнен индукционным в виде БСКТ. Датчик 14 закреплен на рамке 15 с эксцентричным грузом 16. На валу датчика 14 установлен груз 17. Датчик 14 размещен в заполненной демпфирующей жидкостью герметичной камере 18.
Дополнительный корпус 2 подпружинен в осевом направлении относительно основного корпуса- 1 посредством приспособления в виде к.ольца 19, направляющих 20 и пружин 21. Направляющие 20 размещены с возможностью перемещения в отверстиях кольца 19, закрепленного в корпусе 1.
В основном корпусе 1 расположен также блок 2 передачи информации.
Кроме скважинного прибора 23 (фиг. 2) гироскопический инклинометр содержит наземный блок 24. Блок 22 передачи информации связан кабелем с наземным блоком 24 и выполнен в виде трех фазосдвигающих КС-цепей 25-27 и телеизмерительной системы 28. Наземный блок 24 выполнен в виде двух цифровых фазометров 29 и 30. Выход фазометра 29 через преобразователь 31 связан с регистратором 32, а выход фазометра 30 через преобразователь 33 связан с регистратором 32.
Выходы индукционных датчиков 3, 4 и 14 через фазосдвигающие цепи 25-27 связаны с телеизмерительной системой 28, выход которой соединен с входами фазометров 29 и 30.
В качестве телеизмерительной системы 28 может быть использована известная телеизмерительная система для аппаратуры геофизических исследований скважин, содержащая частотные преобразователи, пассивный сумматор и выходной каскад, выполненный на двух лампах, работающих на общую нагрузку.
В качестве регистратора 32 может быть использовано регистрирующее печатающее устройство УП-1,типа Ортех выдающее информацию на бумажном носителе в цифровом виде.
Преобразователи 31 и 33 выполняют функцию блока управления регистратором 32, преобразуя параллельный код фазометров 29 и 30 в последовательно- параллельный код, воспринимаемый регистратором 32.
Гироскопический инклинометр работает следующим образом.
Перед началом измерений на поверхности земли скважинный прибор отклоняется от вертикали в направлении, азимут которого точно известен, и снимаются показания прибора. Затем определяется разность между истинным азимутом, и приборным с учетом кардановой погрешности. Эта разность запоми- 20 ПРИ повороте корпуса 1 их показания
нается. Данной операцией определяют угол между вектором кинетического момента гироскопа и истинным азимутом. Затем скважиннын прибор на кабеле г опускается вскважину и при его подъ- 25 еме начинается непрерывное измерение азимута и зенитного угла скважины; При движении свкважинный прибор вращается вокруг собственной оси, а вектор кинетического момента трехсте- зо пенного гироскопа не изменяет своего положения в инерциональном пространстве и, следовательно, не будет изменять своего положения и наружная рамка 7 гироскопа. Сигнал с датчика .4, статор которого жестко закреплен на дополнительном корпусе 2, а ротор через муфту 6 связан с наружной рамкой 7 гироскопа, будет пропорционален углу между корпусом 2 прибора и вектором кинетического момента гироскопа. Обозначим его через d. г . Этот сигнал поступает на фазосдвигающую RC-цепь 26, а затем подается на вход в телесистему 28. Сигнал с датчика 3, статор которого также жестко закреплен на дополнительном корпусе 2, а на вал ротора установлен вертикальный маятник 5, будет пропорционален углу между дополнительным корпусом 2 прибора и апсидальной плоскостью. Обозначим этот угол через оСк. Этот сиглал поступает на фазосдвигающую RC-цепь 25, а затем на соответст35
40
45
50
изменялись однозначно.
Для горизонтирования вектора кинетического момента на внутрнней рамке 8 гироскопа установлен жидкостной маятниковый датчик 9, сигнал с которого подается на моментный двигатель, ротор 10 которого закреплен на валу наружной рамки 7, а статор 11 в корпусе 12 гироскопа.
Муфта 6 служит для компенсации несоосностей и перекоса осей вала датчика 4 и вала наружной рамки 7 гироскопа, что уменьшает величину паразит ных моментов, действующих на наружную рамку 7 гироскопа.
Для увеличения степени демпфирования вертикального маятника 5, закрепленного на валу датчика 3 при движении скважинного прибора, эти элементы помещены в герметичную камеру 13, заполненную демпфирующей жидкостью.
Зенитный угол измеряется с помощью датчика 14, который установлен на рамке 15 с эксцентричным грузом 16, на валу ротора датчика 14 закреплен груз 17. Сигнал с датчика 14, пропорциональ ный зенитному углу, поступает в фазосдвигающую RC-цепь 27, которая соединена с соответствующим входом телеизмерительной системы 28. Далее сигнал по кабелю передается в наземный блок 24, где поступает в фазометр 30. С выхода фазометра 30 сигнал через преобразователь 33 передается на региствующий вход в телесистему 28. В теле- 55 ратор 32., Для демпфирования колеба- системе 28 эти сигналы преобразуются кий, возникающих при движении прибора и по кабелю подаются в наземный блок по скважине, датчик 14 24, где поступают в цифровой фазометр 29. С выхода фазометра 29 сигнал,
зенитного угла помещен в герметичную камеру заполненную жидкостью.
18,
пропорциональный гироскопическому азимуту, который равен разности двух сигналов ol г - с/к , подается на вход пре- : 1образователя 31, с выхода которого поступает на регистратор 32. Для того, чтобы определить величину истинного азимута необходимо к гироскопическому азимуту, скорретированному на величину кардановой погрешности, добавить разность между истинным и приборным азимутами, определенную на поверхности Земли. При сборке скважинного прибора датчики 3 и 4 устанавливаются таким образом, чтобы при расположении вектора кинетического момента гироскопа в апсидальную плоскость с выходов обоих датчиков или нулевые сигналы, а обмотки включены таким образом, что
5 о
5
0
5
0
изменялись однозначно.
Для горизонтирования вектора кинетического момента на внутрнней рамке 8 гироскопа установлен жидкостной маятниковый датчик 9, сигнал с которого подается на моментный двигатель, ротор 10 которого закреплен на валу наружной рамки 7, а статор 11 в корпусе 12 гироскопа.
Муфта 6 служит для компенсации несоосностей и перекоса осей вала датчика 4 и вала наружной рамки 7 гироскопа, что уменьшает величину паразитных моментов, действующих на наружную рамку 7 гироскопа.
Для увеличения степени демпфирования вертикального маятника 5, закрепленного на валу датчика 3 при движении скважинного прибора, эти элементы помещены в герметичную камеру 13, заполненную демпфирующей жидкостью.
Зенитный угол измеряется с помощью датчика 14, который установлен на рамке 15 с эксцентричным грузом 16, на валу ротора датчика 14 закреплен груз 17. Сигнал с датчика 14, пропорциональный зенитному углу, поступает в фазосдвигающую RC-цепь 27, которая соединена с соответствующим входом телеизмерительной системы 28. Далее сигнал по кабелю передается в наземный блок 24, где поступает в фазометр 30. С выхода фазометра 30 сигнал через преобразователь 33 передается на регистания колеба- ижении прибора
зенитного угратор 32., Для демпфирования колеба- кий, возникающих при движении прибор по скважине, датчик 14
ла помещен в герметичную камеру заполненную жидкостью.
18,
Для уменьшения осевых возмущающих воздействий, возникающих при движении прибора, на вертикальный маятник 5 и груз 17 датчика .14 зенитного угла а также для повышения надежности гироскопического инклинометра узлы блока датчиков закреплены в корпусе 1 при помощи дополнительного корпуса 2, амортизирующих пружин 21, которые « установлены на направляющих 20, перемещающихся в отверстиях кольца 19.
Предлагаемый инклинометр по сравнению с известным имеет более высокую точность измерения, так как не содер-| жит токоподводов, в которых возникают моменты трения действующие на эксцентричную рамку. Кроме того, повышается надежность работы инклинометра, так как исключены отказы, обусловлен- 2Q ные в известном устройстве износом щеток токоподвода и их загрязнением. Наличие демпфирования элементов позволяет производить измерения азимута и зенитного угла в процессе движения. 25
Применение фазового метода измерения позволило упростить электрическую схему преобразования и передачи измерительных сигналов. .
3
Формула изобретения
расположены трехстепенной гироскоп с системой горизонтирования его главной оси, датчики азимутального и зенитного углов, вертикальный маятник и блок передачи информации, связанный с наземным блоком, отличающий- с я тем, что, с целью повышения точности и надежности работы, он снабжен датчиком определения приборного азимута и размещенным внутри основного корпуса дополнительным корпусом, при этом наземный блок выполнен в виде двух фазометров, блок передачи информации - в виде трех фазосдвигающих RC-цепей и телеизмерительной системы, а датчики азимутального и зенитного углов и датчик определения приборного азимута выполнены индукционными, причем гироскоп с системой горизонтирования, вертикальный маятник и датчики установлены внутри дополнительного корпуса, а выходы датчиков через фазосдвигающие цепи связаны с телеизмерительной системой; выход которой соединен с входами фазометров.
21
20
фиг.1
| ТЕЛЕИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 0 |
|
SU290112A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Гироскопический инклинометр | 1977 |
|
SU642473A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Исаченко В.Х | |||
| Инклинометрия скважин | |||
| -М.: Недра, 1987, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
