Изобретение относится к области точного приборостроения, преимущественно гироскопического, и может быть использовано при создании гирокомпасов и курсоуказывающих устройств аналитического типа.
Известен способ определения истинного курса с помощью гироскопического датчика угловой скорости (см., например, книгу Б.И. Назарова и Г.А. Хлебникова "Гиростабилизаторы ракет" М., 1975, стр. 193-196), согласно которому курсовое направление измерительной оси гироскопа определяют аналитически путем вычислений по результатам измерений горизонтальной составляющей угловой скорости вращения Земли. С целью повышения точности определения курса применяют методы, направленные на уменьшение влияния дрейфа гироскопа. Так гироскопический датчик угловой скорости, измерительная ось которого расположена в плоскости горизонта, поворачивают на разные азимутальные углы и снимают на этих углах выходную информацию с гироскопа в виде электрического напряжения с эталонного сопротивления, стоящего в цепи обратной связи. На основе того что ряд моментов гироскопа, не связанных с его корпусом, меняет знак при разворотах его в азимуте, разработаны известные методы, которые позволяют выполнить взаимную компенсацию вредных моментов. Однако эти известные методы автокомпенсации не позволяют полностью исключить погрешность определения курса от вредных моментов гироскопа, а также от других источников, например невыставки осей чувствительности гироскопа в горизонт.
За прототип взят способ определения истинного курса с помощью гироскопического датчика угловой скорости, основанный на его аналитическом вычислении (см. статью S.P.Redkin "Analytical Gyrocompassing by Angular Rate Sensor Based on Dynamically Tuned Gyro", I Saint Petersburg International Conference on Gyroscopic Technology, May, 1994).
В этом способе проводят предварительную настройку по выставке измерительных осей гироскопа в горизонт и привязки их к осям, связанным с объектом, включают гироскоп в режим работы с обратной связью по току датчика момента, определяют сигнал с эталонного сопротивления датчика угловой скорости в первом положении "a" на угле измеряемого курса, поворачивают гироскоп в азимуте во второе положение "c" вокруг собственной оси на 180 градусов, а затем в третье положение "b" на 90 градусов и измеряют сигналы с гироскопа на этих углах, после чего искомый азимутальный угол оси Y первого канала находят аналитически с использованием значений сигналов с эталонного сопротивления, полученных на этих углах с помощью следующего соотношения (1)
(1)
где U11a, U11c, U11b - напряжения с эталонного сопротивления датчика угловой скорости соответственно в "a", "c", "b".
При наличии практически всегда имеющихся малых углов наклона плоскости расположения осей чувствительности гироскопа в известном способе выражение для определения искомого азимутального угла можно представить в следующем виде: (2)
(2)
где
δb,δc - погрешность азимутального позиционирования гироскопа соответственно в положении "b" и "c",
Kн11 - крутизна гироскопа по напряжению по первому каналу,
H1 - кинетический момент гироскопа,
Ω - угловая скорость вращения Земли,
ϕ - широта местоположения объекта,
ΔM
M1x 1yb, M1a 1ya - коэффициент, характеризующий момент от осевого разбаланса в положении "b" и "a",
ΔM
M1x 1xa, M1x 1xb - квадратурные моментные коэффициенты в положениях "a" и "b",
ΔM
ΔM
ΔM
M1x 1y1ya, M1x 1z1za, M1x 1y1yb, M1x 1z1zb - коэффициенты, обуславливающие момент от неравножесткости соответственно в положении гироскопа "a" и "b",
ΔM
M1x 1x1ya, M1x 1x1yb - коэффициентные моменты от перекрестного влияния ускорений со ответственно в положении "a" и "b",
ΔM
Сравнивая выражение (1), используемое в прототипе для определения азимутального угла, с полученным уточненным выражением (2), можно отметить, что в известном способе искомый угол определяется с погрешностью, обусловленной:
- ошибкой азимутального позиционирования δb,δc гироскопа в положениях "b" и "c",
- нескомпенсированными остаточными моментами ΔM
- проекциями на измерительную ось вертикальной составляющей угловой скорости вращения Земли при наклоне плоскости измерительных осей гироскопа на углы γ и ν.
Наклон плоскости измерительных осей гироскопа также обуславливает остаточные вредные моменты.
Таким образом, в прототипе не учитываются эти факторы. Это обстоятельство приводит к определению азимутального угла с погрешностью при малых углах наклона и практически исключает возможность гирокомпасирования при больших углах наклона из-за возникающих больших погрешностей вследствие проекций на измерительную ось вертикальной составляющей Земли и вредных моментов, обусловленных осевым разбалансом, квадратурным моментом, моментом от неравножесткости и другими моментами. При этом в известном способе требуется практическая реализация устройства азимутального позиционирования гироскопа. Ошибка позиционирования также вызывает погрешность гирокомпасирования.
Целью настоящего изобретения является обеспечение возможности определения истинного курса с помощью гироскопического датчика угловой скорости в условиях неподвижного наклонного основания.
Поставленная цель достигается тем, что в известном способе определения истинного курса с помощью датчика угловой скорости, включающем предварительную привязку измерительных осей гироскопа к осям, связанным с объектом, применение гироскопа в режиме обратной связи по току датчика момента, определение сигналов с эталонных сопротивлений датчика угловой скорости при операции предварительной настройки проводят фазировку системы измерения напряжений с эталонных сопротивлений гироскопа, обеспечивающую в горизонтальном положении измерительных осей отрицательные приращения сигналов с первого и второго каналов гироскопа при азимутальном повороте его корпуса против часовой стрелки на 90 градусов из положения, при котором измерительная ось у первого канала направлена на север, а измерительная ось x второго канала на восток, определяют коэффициенты модели дрейфа гироскопа, а при гирокомпасировании в искомом курсовом положении объекта определяют углы наклона плоскости измерительных осей гироскопа по тангажу и крену, угол широты местоположения объекта, напряжения с эталонных сопротивлений гироскопа по первому и второму каналам, а затем определяют значение истинного курса измерительной оси первого канала гироскопа по следующей формуле:
K = 2π - arctg a, если b1 > 0, b2 > 0;
K = π - arctg a, если b1 > 0, b2 < 0;
K = π - arctg a, если b1 < 0, b2 < 0;
K = - arctg a, если b1 < 0, b2 > 0;
где a = b1b2 -1;
b2= U11Kн11Cosγ+ω
ω
ω
ω - коэффициенты модели дрейфа, пропорциональные ускорению во второй степени,
- коэффициенты модели дрейфа, пропорциональные ускорению во второй степени,
U11, U12 - напряжения с эталонных сопротивлений датчика угловой скорости соответственно по первому и второму каналам,
Kн11, Kн12 - крутизна гироскопа по напряжению для первого и второго канала,
ν,γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену,
Ω - угловая скорость вращения Земли,
ϕ - широта местоположения объекта.
Схема двухканального гироскопа в режиме обратной связи по моменту показана на фиг. 1. Первый канал гироскопа содержит датчик угла 1, измеряющий поворот корпуса гироскопа 9 относительно измерительной оси Yг1, усилитель 2, эталонное сопротивление 3, датчик момента 4, создающий момент вокруг оси Xг1. Второй канал содержит датчик угла 5, измеряющий поворот корпуса гироскопа относительно измерительной оси Xг1, усилитель 6, эталонное сопротивление 7, датчик момента 8, создающий момент вокруг оси Yг1.
В установившемся режиме для изодромной обратной связи напряжения с эталонных сопротивлений датчика угловой скорости можно представить в следующем виде
U11= -ω
U12= ω
где ω
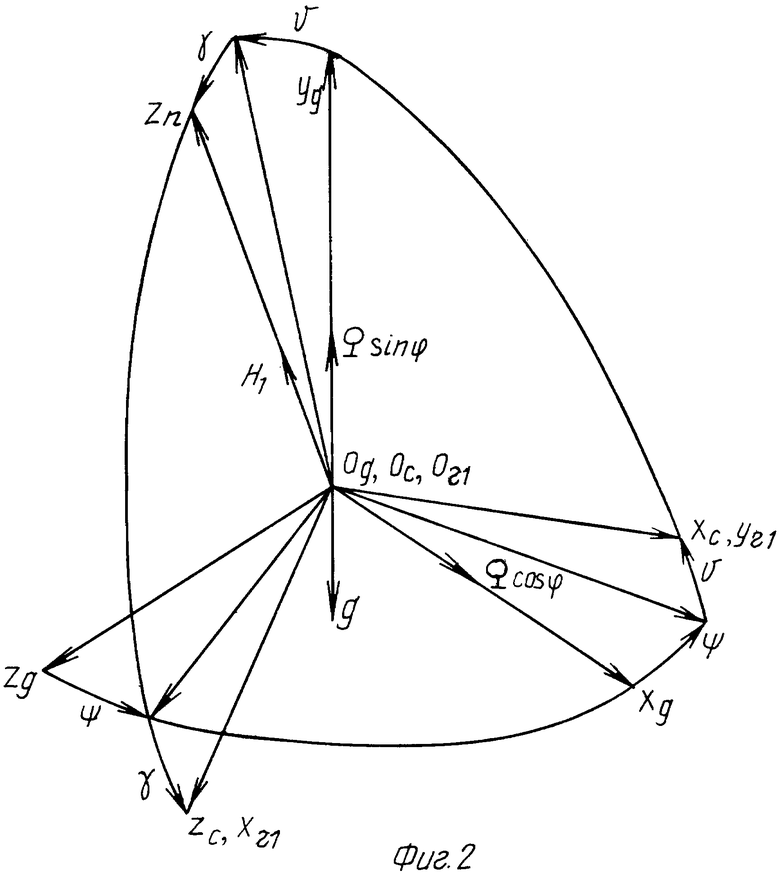
Свяжем с гироскопом систему координат O21X21Y21Z21. Оси O21X21 и O21Y21 направлены по измерительным осям гироскопа, а ось O21Z21 вдоль оси собственного вращения гироскопа. С объектом свяжем систему координат OcXcYcZc. Ось OcXc направлена вдоль продольной оси объекта, ось OcYc перпендикулярна оси OcXc и располагается в плоскости симметрии объекта, ось OcZc - перпендикулярна этой плоскости.
Система координат OдXдYдZд является системой координат Дарбу. Взаимное расположение систем координат показано на фиг. 2.
В соответствии с взаимным расположением выбранных систем координат проекции абсолютной угловой скорости на оси гироскопа в случае неподвижного относительно Земли объекта можно представить в следующем виде:
ω
ω
Подставив выражение (4) в выражение (3), можно получить следующую систему уравнений:
C11Cosψ+ = d1;
C21Cosψ+C22Sinψ = d2, (5)
где
C11= -ΩCosϕCosν;
C21= -ΩCosϕSinγSinν;
C22= -ΩCosϕCosγ;
d1= -U11Kн11-ω
d2= U12Kн12-ω
Решая уравнение (5), определяем выражение для cosψ и sinψ. В практике определения курсового угла с помощью датчика угловой скорости его вычисления проводят через функцию арктангенс. Тогда аналитическое выражение для определения азимутального угла ψ можно представить в следующем виде:
ψ = arctg a, (6)
где a = b1b2 -1;
b2= U11Kн11Cosγ+ω
При использовании функции тангенса квадрант, в котором расположен азимутальный угол ψ, может быть вычислен по соотношению знаков b1 и b2. Зная квадрант, формулу для вычисления угла истинного курса можно представить в виде
K = 2π - arctg a, если b1 > 0, b2 > 0;
K = π - arctg a, если b1 > 0, b2 < 0;
K = π - arctg a, если b1 < 0, b2 < 0;
K = - arctga, если b1 < 0, b2 > 0. (7)
При изодромной обратной связи в установившемся режиме стационарную модель дрейфа гироскопа можно представить в виде

где fx, fy, fz - составляющие удельной силы вдоль положительных направлений осей, связанных с гироскопом.
Для неподвижного объекта уравнение (8) может быть выражено через составляющие ускорения силы тяжести путем подстановки
fx = gx, fy = gy, fz = gz. (9)
С учетом взаимного расположения осей координат Дарбу и системы координат, связанной с гироскопом, показанных на фиг. 2, проекции ускорения силы тяжести на оси, связанные с гироскопом, можно представить в виде
gx= gSinγCosν, gy= -gSinν, gz= -gCosγCosν; (10)
где g - ускорение силы тяжести.
С учетом (9) и (10) модель дрейфа гироскопа будет иметь вид
Таким образом, предлагаемый способ определения истинного курса с помощью двухканального гироскопического датчика угловой скорости имеет следующие отличия от известного способа:
- в операциях при предварительной настройке и измерении напряжений в процессе гирокомпасирования используются одновременно два канала гироскопа, в отличие от одного канала в известном способе, что не требует специального устройства азимутального позиционирования гироскопа,
- в операции предварительной настройки гироскопического датчика угловой скорости показана последовательность действий по фазировке сигналов с двух каналов гироскопа и знаки приращений напряжений при задаваемом направлении поворота корпуса гироскопа, что является необходимым условием для применения предлагаемых формульных соотношений,
- в операции предварительной настройки проводится определение модели дрейфа, обеспечивающего его алгоритмическую компенсацию как в горизонтальном, так и наклонном положении гироскопа, в то время как в известном способе реализуется автокомпенсация дрейфа только в горизонтальном положении,
- в операции гирокомпасирования вводится два новых действия по определению углов наклона гироскопа по тангажу и крену и широты местоположения объекта, а также измерение напряжений с эталонных сопротивлений гироскопа проводится одновременно по двум каналам и только в одном искомом азимутальном положении корпуса гироскопа в отличие от известного способа, где используются три азимутальных положения гироскопа,
- определение истинного курсового угла производится по новой аналитической зависимости, в которой аналитически компенсируется влияние вертикальной составляющей угловой скорости вращения Земли и дрейфа гироскопа в условиях наклонного основания, что обеспечивает возможность гирокомпасирования наклонного объекта при бесплатформенном применении гироскопического датчика угловой скорости по показаниям двух каналов в одном искомом азимутальном положении.
На фиг. 1 показана схема двухканального гироскопа в режиме обратной связи по моменту.
На фиг. 2 показано взаимное расположение систем координат.
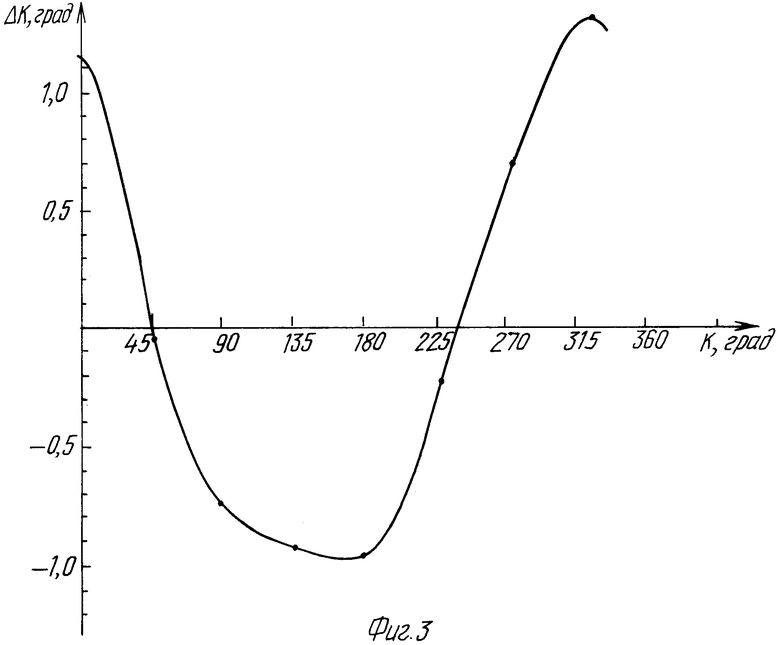
На фиг. 3 показана экспериментальная зависимость погрешности определения курса на разных курсовых углах, полученная предлагаемым способом.
Проводилась экспериментальная сравнительная оценка точности определения курса с помощью гироскопического датчика угловой скорости с применением известного и предлагаемого способов.
Экспериментальные исследования проводились с помощью датчика угловой скорости на базе динамически настраиваемого гироскопа ГВК-6. Предварительно определялись коэффициенты модели дрейфа гироскопа. Затем динамически настраиваемый гироскоп ГВК-6 устанавливался на платформу стенда таким образом, что плоскость измерительных осей гироскопа имела наклон по тангажу ν = 10 град., по крену γ = 10 град. Стенд также обеспечивал задание различных курсовых углов наклонного гироскопа с точностью 10 угл. секунд.
Динамически настраиваемый гироскоп работал в режиме датчика угловой скорости путем включения его в систему обратных связей по моментам. С эталонных сопротивлений, стоящих в цепях обратных связей, измерялись напряжения. Гироскоп из исходного положения, при котором курсовой угол равен 0, поворачивался против часовой стрелки на курсовые углы 90, 135, 180, 225, 270, 315, 360 градусов. На каждом из этих углов производилось измерение напряжений по двум каналам гироскопа, на базе которых с помощью программ, реализующих известный и предлагаемые способы, определялись значения курсовых углов на устанавливаемых азимутальных положениях гироскопа.
Погрешность измерения курсовых углов определялась как разность известных и измеренных курсовых углов.
Для известного способа получена практически неприемлемая большая величина погрешности определения курсового угла, достигающая десятков градусов.
На фиг. 3 показана экспериментальная зависимость погрешности определения курса на разных курсовых углах, полученная предлагаемым способом.
Из зависимости, представленной на фиг. 3, видно, что применение предлагаемого способа позволяет выполнять гирокомпасирование с применением гироскопического датчика угловой скорости в условиях наклонного объекта. В то время как применение известного способа в этих условиях не позволяет выполнить гирокомпасирование из-за неприемлемо больших погрешностей. В предлагаемом способе погрешность определения курса в диапазоне курсовых углов от 0 до 360 градусов не превысила 1,284 град.
Использование предлагаемого способа определения истинного курса с помощью двухканального датчика угловой скорости обеспечивает по сравнению с существующими способами возможность проведения гирокомпасирования в условиях наклонного неподвижного объекта при бесплатформенном применении гироскопа, что обуславливает возможность расширения области использования гирокомпасных устройств на его основе. Так наличие возможности гирокомпасирования с применением датчика угловой скорости в условиях неподвижного наклонного объекта позволяет проводить начальную выставку по курсу бесплатформенных инерциальных систем, создавать двухрежимные приборы курса для наземных объектов, определяющих курс при остановках и сохраняющих его при движении.
Изобретение относится к области точного приборостроения, преимущественно гироскопического, и может быть использовано при создании гирокомпасов и курсоуказывающих устройств аналитического типа. Для определения угла истинного курса с помощью двухканального гироскопического датчика угловой скорости проводят предварительную фазировку системы измерения напряжений с эталонных сопротивлений со знаками проекций горизонтальной составляющей угловой скорости вращения Земли. Определяют коэффициенты модели дрейфа гироскопа. При гирокомпасировании в искомом курсовом положении объекта определяют углы наклона плоскости измерительных осей гироскопа по тангажу и крену, угол широты местоположения объекта, напряжения с эталонных сопротивлений гироскопа по первому и второму каналам и аналитически определяют значение истинного курса, компенсируя при этом проекции на измерительные оси вертикальной составляющей угловой скорости Земли и дрейф гироскопа. Обеспечивается возможность определения истинного курса в условиях неподвижного наклонного основания. 3 ил.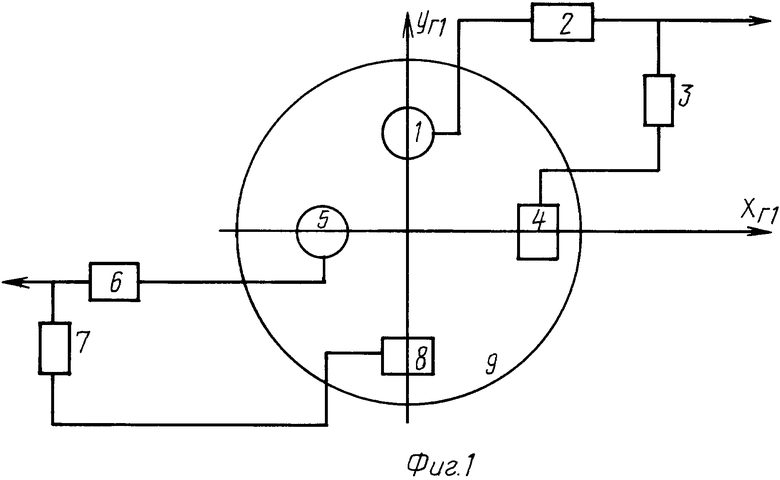
Способ определения истинного курса с помощью двухканального гироскопического датчика угловой скорости, включающий предварительную привязку измерительных осей гироскопа к осям, связанным с объектом, применение гироскопа в режиме обратной связи по току датчика момента, определение сигналов с эталонных сопротивлений датчика угловой скорости, отличающийся тем, что предварительно проводят фазировку системы измерения напряжений с эталонных сопротивлений гироскопа, обеспечивающую в горизонтальном положении измерительных осей отрицательные приращения сигналов с первого и второго каналов гироскопа при азимутальном повороте его корпуса против часовой стрелки на 90o из положения, при котором измерительная ось Y первого канала направлена на север, а измерительная ось X второго канала на восток, определяют коэффициенты модели дрейфа гироскопа, а при гирокомпасировании в искомом курсовом положении объекта определяют углы наклона плоскости измерительных осей гироскопа по тангажу и крену, угол широты местоположения объекта, напряжения с эталонных сопротивлений гироскопа по первому и второму каналам, а затем определяют значение истинного курса измерительной оси первого канала гироскопа по следующей формуле:
k = 2π - arctg a, если b1 > 0, b2 > 0;
k = π - arctg a, если b1 > 0, b2 < 0;
k = π - arctg a, если b1 < 0, b2 < 0;
k = - arctg a, если b1 < 0, b2 > 0;
где
a = b1b2 -1;
b2= U11KH11Cosγ+ω
ω
ω
ω - коэффициенты модели дрейфа, пропорциональные ускорению во второй степени;
- коэффициенты модели дрейфа, пропорциональные ускорению во второй степени;
U11, U12 - напряжения с эталонных сопротивлений датчика угловой скорости соответственно по первому и второму каналам;
KH11, KH12 - крутизна гироскопа по напряжению для первого и второго каналов;
υ, γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену;
Ω - угловая скорость вращения Земли;
ϕ - широта местоположения объекта.
| S.P.Redkin "Analytical Gyrocompassing by Angular Rate Sensor Based on Dynamically Tuned Gyro", I Saint Petersburg International Conference on Gyroscopic Technology, May, 1994 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1995 |
|
RU2098766C1 |
| RU 2073206 C1, 10.02.1997 | |||
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |

