Изобретение относится к измерительной аппаратуре, которая предназначена для контроля за траекторией ствола скважины или за положением бурильного инструмента относительно окружающего пространства при бурении скважин в процессе их строительства в нефтяной и газовой промышленности.
В настоящее время в мировой практике наиболее широко распространены инклинометры, которые для измерения зенитного угла (наклона оси скважины относительно вертикали) используют акселерометры или маятниковые индикаторы горизонта, а для определения азимута (угла отклонения от меридиана) магнитные или гироскопические компасы [1]
Недостатком магнитных инклинометров является невысокая точность измерения углов из-за подверженности влиянию магнитных масс бурильных труб и магнитных аномалий окружающей породы, ухудшающих точность определения азимута, которая особенно необходима, например, при кустовом и направленном бурении.
В качестве прототипа, наиболее близкого по своим техническим решениям к предлагаемому изобретению, выбран гироскопический инклинометр, содержащий два трехстепенных гироскопа и три одноосных акселерометра, жестко закрепленных в сенсорном блоке, который подвешен в карданном кольце со следящей системой стабилизации, отрабатывающей в ноль его положение вокруг продольной оси инклинометра [2]
Способ вычисления углов в этом инклинометре заключается в счислении величин зенитного угла и азимута по известным алгоритмам инерциальной навигации, использующим выходные данные гироскопов и акселерометров, кодировании этих данных и передачи их по кабелю в компьютер, находящийся на поверхности, который производит все вычисления. В процессе измерения углов регулярно проводятся кратковременные остановки инклинометра, во время которых происходит автоматическая коррекция его выходных данных.
Основным недостатком прототипа гироскопического инклинометра и способа вычисления его углов является невозможность его использования в процессе бурения в качестве телеметрической системы (MWD-системы) из-за необходимости кабельной связи между датчиками инклинометра и компьютером, находящимся на поверхности. Прототипу, как любой гироскопической инерциальной системе, свойственно нарастание ошибок во времени, что накладывает определенные, достаточно жесткие границы по времени ее использования для съемки скважин и обуславливает необходимость регулярных остановок инклинометра в процессе измерений для проведения коррекций. Наличие одноосного карданного подвеса с приводом усложняет конструкцию системы и увеличивает габариты, что снижает ее надежность и ограничивает ее применение в узких скважинах.
Заявляемое изобретение лишено указанных недостатков, так как обеспечивает определение направления ствола скважины и положения бурильного инструмента в процессе бурения, не требует при измерениях даже кратковременных остановок и не имеет в инклинометре одноосного карданного подвеса с приводом.
Предлагаемое устройство представляет собой бескарданный гироскопический инклинометр, содержащий корпус, в котором имеются два трехстепенных гироскопа и три одноосных акселерометра, а также установлены датчик температуры и цифровой вычислитель. Существенные отличия предлагаемого устройства инклинометра от известного прототипа состоят в том, что:
гироскопы и акселерометры установлены в корпусе и жестко с ним связаны;
вычислитель размещен в корпусе инклинометра;
дополнительно в корпусе инклинометра размещены предварительные усилители, преобразователи напряжение код, преобразователи код ток, при этом,
выходы датчиков углов гироскопов соединены со входами предварительных усилителей, выходы которых соединены со входами преобразователей напряжение - код, а выходы преобразователей напряжение код соединены со входами вычислителя; выходы акселерометров соединены со водами преобразователей напряжение код, выходы которых соединены со входами вычислителя; выходы вычислителя соединены со входами преобразователей код ток, выходы которых соединены с соответствующими датчиками моментов гироскопов;
выход датчика температуры соединен со входом преобразователя напряжение код, выход которого соединен со входом вычислителя.
Предлагаемый способ выработки инклинометрических углов заключается в том, что сначала величины зенитного угла, азимута и угла положения отклонителя вычисляют и кодируют в инклинометре, затем передают их по каналу связи любого типа на поверхность Земли, где преобразуют к виду, удобному для отображения на дисплее или принтере. При этом цифровой вычислитель инклинометра согласно изобретению выполняет следующие операции:
корректирует выходные сигналы гироскопов, работающих в режиме измерения угловой скорости, и акселерометров в зависимости от температуры внутри корпуса инклинометра;
вычисляет величины трех углов взаимного положения трехгранника, связанного с корпусом инклинометра, относительно географического трехгранника в зависимости от сигнала акселерометра с осью чувствительности, параллельной продольной оси инклинометра;
счисляет грубые значения углов взаимного положения трехгранников по сигналам измерений, производимых акселерометрами, и сигналам измерений проекций угловой скорости, производимых гироскопами, путем алгебраических и тригонометрических преобразователей;
счисляет точные значения углов взаимного положения трехгранников по сигналам акселерометров и сигналам измерений проекций угловой скорости путем интегрирования системы дифференциальных уравнений типа Пуассона, при этом грубые значения углов используются как в качестве начальных условий, так и для формирования дополнительных слагаемых в правых частях системы дифференциальных уравнений;
счисляет зенитный угол, азимут инклинометра и угол положения отклонителя по величинам точных значений углов взаимного положения трехгранников.
Предлагаемое устройство бескарданного гироскопического инклинометра и способ выработки углов зенитного угла, азимута и угла положения отклонителя, используемый в нем, обладает практической возможностью выполнять свои функции как в качестве каротажного инклинометра (при кабельной связи забой устье), так и в составе телеметрической забойной системы (MWD-системы) в процессе бурения скважины с беспроводным каналом связи любого типа предпочтительно при турбинном бурении.
Исключение из конструкции одноосного кардана со следящим приводом упрощает устройство инклинометра и позволяет уменьшить его наружный диаметр, что расширяет возможности его применения в том числе и в более узких скважинах и повышает надежность его работы.
Применение цифрового вычислителя, встроенного в корпус инклинометра, обеспечивает:
повышение точности измерения инклинометрических углов за счет более точного управления гироскопами и осуществления температурной коррекции показаний гироскопов и акселерометров,
повышение скорости и надежности передачи информации на поверхность Земли при беспроводном канале связи за счет сокращения объема передаваемой информации.
При эксплуатации бескарданного гироскопического инклинометра время его работы не ограничено и в процессе измерений специальных остановок не требуется. Поэтому его применение не накладывает ограничений на технологический процесс бурения и не требует дополнительных затрат времени при бурении.
Дополнительно с помощью бескарданного гироскопического инклинометра можно определять место бурильного инструмента (его координаты) в скважине, если одним из известных способов и аппаратуры измеряется длина колоны буровых труб или длина каротажного кабеля от устья до забоя.
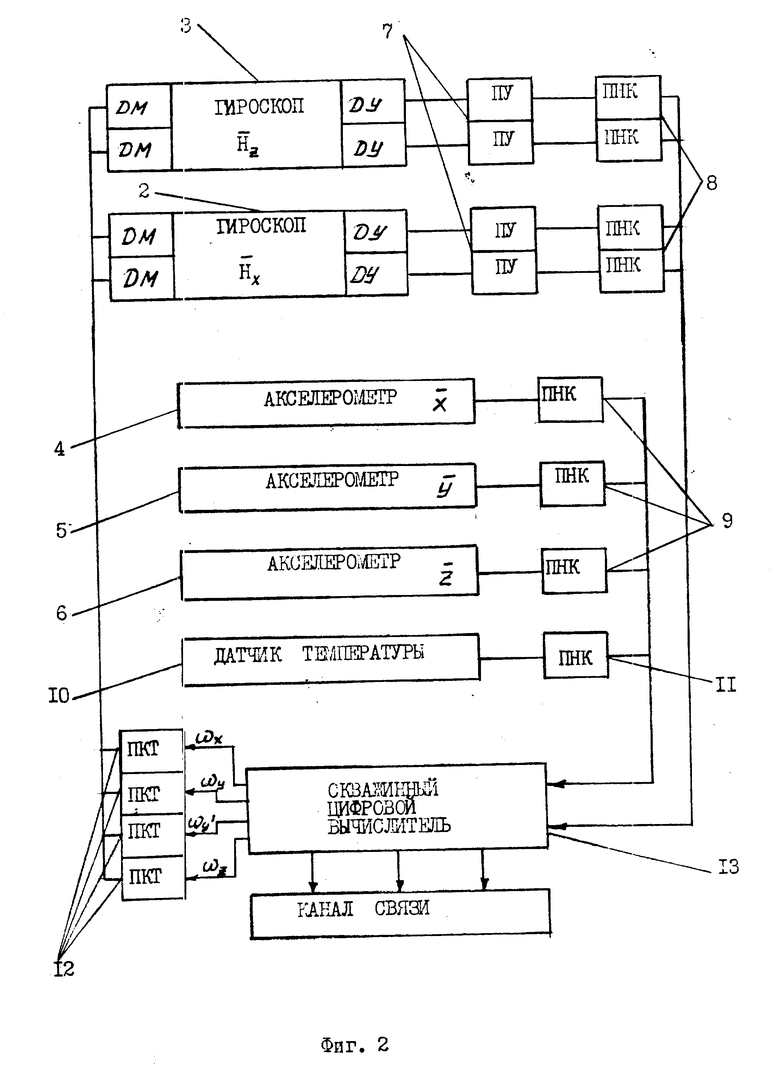
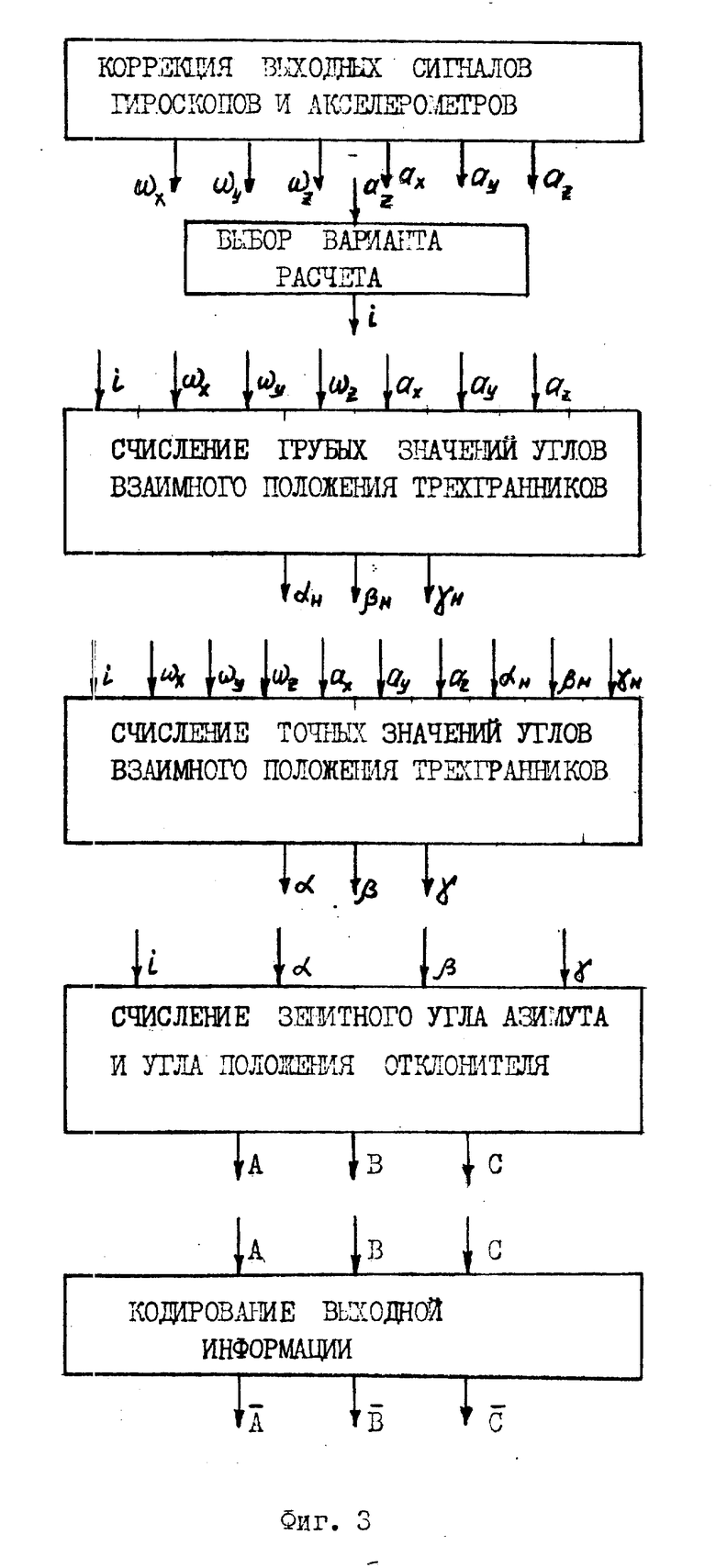
На фиг. 1 представлена схема расположения гироскопов и акселерометров в корпусе инклинометра относительно координатных осей связанного с ним трехгранника; на фиг. 2 структурно-функциональная блок-схема управления инклинометра; на фиг. 3 блок-схема алгоритма вычисления углов инклинометра.
Бескарданный гироскопический инклинометр (БГИ) представляет собой герметичный цилиндрический корпус 1 диаметром 90 мм, выполненный из прочной стали и состоящий из трех разъемных секций (секции на фиг. 1 не показаны).
Внутри одной секции находится блок чувствительных элементов деталь сложной конфигурации, в пазах которой установлены в определенном положении два трехстепенных гироскопа 2, 3 ( ось собственного вращения гироскопа) и три одноосных акселерометра 4, 5, 6 (
ось собственного вращения гироскопа) и три одноосных акселерометра 4, 5, 6 ( оси чувствительности акселерометров). Блок посредством штыря, совпадающего с продольной осью корпуса, жестко связан с амортизационным устройством, демпфирующим возмущающие воздействия вибрации и ударов на чувствительные элементы при работе в забое.
оси чувствительности акселерометров). Блок посредством штыря, совпадающего с продольной осью корпуса, жестко связан с амортизационным устройством, демпфирующим возмущающие воздействия вибрации и ударов на чувствительные элементы при работе в забое.
Во второй секции размещены блоки питания, преобразующие напряжение, вырабатываемое турбогенератором или передаваемое по кабелю, во все виды вторичного электропитания, необходимые для функционирования БГИ.
В третьей секции установлены узлы и блоки цифрового вычислителя с входными и выходными преобразователями, который управляет работой БГИ и вырабатывает углы, определяющие положение корпуса инклинометра по данным измерений чувствительных элементов.
Гироскопы 2, 3 и акселерометры 4 6 жестко закреплены в корпусе 1 инклинометра. При этом акселерометры установлены так, что их оси чувствительности  взаимно ортогональны, а ось чувствительности одного из них
взаимно ортогональны, а ось чувствительности одного из них  параллельна продольной оси инклинометра, реализуя такими образом трехгранник координатных осей X Y Z, связанный с корпусом 1 инклинометра. Ось собственного вращения гироскопа
параллельна продольной оси инклинометра, реализуя такими образом трехгранник координатных осей X Y Z, связанный с корпусом 1 инклинометра. Ось собственного вращения гироскопа  совпадает с продольной осью инклинометра или параллельна ей, а ось второго гироскопа
совпадает с продольной осью инклинометра или параллельна ей, а ось второго гироскопа  перпендикулярна ей. При этом три оси прецессии гироскопов совпадают с тремя осями
перпендикулярна ей. При этом три оси прецессии гироскопов совпадают с тремя осями  чувствительности акселерометров, а четвертая ось остается резервной.
чувствительности акселерометров, а четвертая ось остается резервной.
Кроме чувствительных элементов в корпусе инклинометра (фиг. 2) размещены:
предварительные усилители (ПУ) 7 сигналов датчиков угла (ДУ) гироскопов 2, 3,
преобразователи напряжения этих аналоговых сигналов в код (ПНК) 8,
преобразователи напряжение код (ПНК) 9 сигналов, вырабатываемых акселерометрами 4 6,
датчик температуры 10, установленный в блоке чувствительных элементов,
преобразователь напряжение код (ПНК) 11 сигнала датчика температуры,
преобразователь код ток (ПКТ) 12 сигналов управления гироскопами, вырабатываемых вычислителем 13, в токи управления, поступающие на датчики моментов (ДМ) гироскопов 2, 3.
Устройство работает следующим образом (см. фиг. 2).
Аналоговый сигнал датчика угла гироскопа 2 через предварительный усилитель 7 проходит в преобразователь напряжение код (ПНК) 8, с выхода которого закодированный цифровой сигнал поступает в скважинный цифровой вычислитель (СЦВ) 13.
Вычислитель 13 согласно заданному программой алгоритму (который будет описан ниже) вырабатывает цифровой сигнал, пропорциональный угловой скорости относительно оси Z гироскопа 2. Этот сигнал трансформируется преобразователем код ток (ПКТ) 12 в ток, который поступает на датчик момента гироскопа 2 и вызывает его прецессию к положению равновесия. Аналогичным образом осуществляется управление гироскопами и по остальным осям прецессии: оси Y гироскопа 2 и осям X и Y гироскопа 3.
Сигналы ax, ay, az трех акселерометров 4, 5, 6 после преобразования в ПНК 9 поступают в скважинный вычислитель 13.
Кроме того, в вычислитель поступает после преобразования в ПНК 11 сигнал датчика температуры 10. Этот сигнал используется в СЦВ 13 для выработки величин, компенсирующих тепловые дрейфы гироскопов и акселерометров, возникающие при изменении температуры внутри блока чувствительных элементов. Характеристики тепловых дрейфов типов гироскопов и акселерометров, примененных в инклинометре, определяются экспериментально, после чего записываются в память вычислителя.
На основании информации, полученной от гироскопов, акселерометров и датчика температуры, СЦВ вырабатывает сигналы для управления гироскопами, вычисляет промежуточные величины и величины инклинометрических углов: зенитного, азимута и угла положения отклонителя и кодирует их для ввода в аппаратуру канала связи. Закодированная информация инклинометра по каналу связи (беспроводному или кабельному) поступает в наземный цифровой вычислитель (компьютер), который расшифровывает полученную информацию, вырабатывает численные значения инклинометрических углов с учетом запаздывания в прохождении ее по каналу связи и передает данные на экран монитора и записывающую аппаратуру.
В предлагаемом БГИ гироскопы используются в режиме измерителей угловой скорости. Для осуществления этой функции служат четыре контура регулирования, каждый из которых управляет прецессионным движением гироскопа относительно одной из осей его прецессии таким образом, чтобы привести его главную ось (ось собственного вращения) в положение равновесия, в котором сигнал соответствующего датчика угла равен нулю. Контур регулирования удерживает главную ось гироскопа в этом положении непрерывно. Следовательно, соответствующая проекция угловой скорости гироскопа совпадает с проекцией угловой скорости корпуса инклинометра, а величина ее определяется по величине сигнала управления гироскопа, который вырабатывается в вычислителе.
Как видно из фиг. 1, гироскопы в инклинометре ориентированы относительно корпуса таким образом, что продольный гироскоп  измеряет проекции угловой скорости на оси X и Y, а поперечный
измеряет проекции угловой скорости на оси X и Y, а поперечный  на оси Y и Z приборного трехгранника X, Y, Z.
на оси Y и Z приборного трехгранника X, Y, Z.
Заметим, что измерение проекции угловой скорости на ось Y осуществляется дважды.
Поскольку все четыре контура регулирования идентичны, рассмотрим работу одного из них, измеряющего проекцию ωx угловой скорости инклинометра на ось X. Датчик угла гироскопа 3 вырабатывает напряжение δу пропорциональное углу отклонения главной оси гироскопа 3 от нулевого положения. Сигнал после предварительного усиления в ПУ 7 поступает на вход ПНК 8, на выходе которого формируются цифровые импульсы с временным шагом h вида
где αу угол рассогласования, измеряемый датчиком угла.
В скважинном вычислителе 13 цифровые сигналы суммируются по мере поступления и в момент времени tk вырабатывается величина
По этим данным в вычислителе 13 формируется величина сигнала управления согласно алгоритму
где  промежуточная переменная;
промежуточная переменная;
k1, k2 коэффициенты управления.
Далее цифровой сигнал ωx поступает из вычислителя 13 на ПКТ 12, который возбуждает датчик момента гироскопа 3. Последний вызывает прецессию гироскопа 3, приводящую его главную ось в нулевое положение. Величина ωx одновременно является мерой проекции угловой скорости и используется в вычислителе 13 для выработки величин инклинометрических углов.
Для вычисления величин углов азимута A, зенитного B и угла положения отклонителя C на входе вычислителя 13, кроме цифровых сигналов от ПНК 8, используемых в задаче управления гироскопами и формирования цифровых значений угловых скоростей ωx, ωy, ωz, поступают сигналы от акселерометров ax, ay, az через ПНК 9 и сигнал датчика температуры 10 через ПНК 11. Все преобразователи вырабатывают цифровые сигналы так же, как описано выше при рассмотрении задачи управления гироскопами. При таком способе вычисления сигналы, вырабатываемые вычислителем 13, обладают повышенной помехоустойчивостью.
Алгоритмы вычисления проекций силы тяжести на оси X, Y, Z проиллюстрируем на примере одного акселерометра. Выходной сигнал ax акселерометра 4 после прохождения ПНК 9 трансформируется в цифровые импульсы
где h временной шаг.
После суммирования величин Δvx на интервале осреднения Tоср. в вычислителе 13 вырабатывается сглаженная величина ускорения
Аналогично вырабатывается цифровое значение температуры, измеренной датчиком 10 в корпусе инклинометра. В зависимости от температуры, а точнее по ее отклонению от номинального значения, в вычислителе 13 к величинам ускорений ax, ay, az и угловых скоростей ωx, ωy, ωz добавляются корректирующие поправки, учитывающие тепловой дрейф акселерометров и гироскопов. Характеристики этих поправок определяются экспериментально и зависят от конкретных типов гироскопов и акселерометров.
Для повышения точности выработки выходной информации в широком диапазоне изменения зенитного угла от 0 до 180o в вычислительный алгоритм заложены три варианта решения задачи. Эти варианты соответствуют трем диапазонам изменения зенитного угла: от 0 до 45o, от 45 до 135o и от 135 до 180o.
Выбор варианта осуществляется по показаниям акселерометра 6 с осью чувствительности  , ориентированной по продольной оси инклинометра, т.е. в зависимости от сигнала az. Критериями выбора варианта служат три неравенства
, ориентированной по продольной оси инклинометра, т.е. в зависимости от сигнала az. Критериями выбора варианта служат три неравенства
где g ускорение силы тяжести.
Для примера рассмотрим вариант вычислительного алгоритма, который осуществляется при выполнении первого неравенства.
После выбора варианта вычисления (см. фиг. 3), который является вторым шагом вычислительного алгоритма, вычисляются грубые значения углов рассогласования α, β, γ трехгранника X Y Z, связанного с корпусом инклинометра, и географического трехгранника x h z (см. фиг. 1), по формулам
Вычисление точных значений углов α, β, γ осуществляется путем решения системы трех дифференциальных уравнений
где U угловая скорость вращения Земли;
v известная широта места.
В качестве начальных условий для вычисления точных значений углов a, β, γ берутся их грубые значения
b(0) = βн, γ(0) = γн, α(0) = αн. (9)
Демпфирующие члены dβ, dγ, dα формируются с использованием грубых значений углов bн и γн.
Полученные точные значения углов рассогласования α, β, γ в дальнейшем используются для вычисления выходной информации инклинометрических углов. Зенитный угол B вычисляется по формуле
Вычисление азимута A инклинометра, т.е. ориентации апсидальной плоскости относительно географического Севера, осуществляется по формуле
при значениях зенитного угла B ≥ 2o.
При величинах угла B < 2o значение азимутального угла принимается равным 0.
Вычисление угла положения угла отклонителя C производится по формуле
C = 360°-α-A, (12)
где α и A величины углов, вычисленные ранее.
Если направление скважины близко к вертикали (B < 2o), то азимут A=0 и угол C определяет положение отклонителя относительно меридиана (Севера), которое необходимо для зарезки скважины. После зарезки скважины при величинах B > 2o угол C отсчитывается от апсидальной плоскости по формуле (11).
Основное преимущество предлагаемого бескарданного гироскопического инклинометра и способа вычисления с его помощью инклинометрических углов заключается в возможности его использования в процессе бурения скважин в составе телеметрических забойных систем (MWD-систем) без нарушения технологического процесса бурения. Более того, применение бескарданного гироскопического инклинометра в сочетании с телеметрической забойной системой, измеряющей также технологические и геофизические данные, при бурении наклонно-направленных и горизонтальных скважин по добыче нефти и газа позволит оптимизировать технологический процесс бурения и значительно повысить не только экономическую эффективность бурения скважин, но их производительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТА СТВОЛА СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2085730C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| ГИРОИНКЛИНОМЕТР | 1994 |
|
RU2078204C1 |
| Гироскопический инклинометр | 1981 |
|
SU1002551A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СКВАЖИННОГО ПРИБОРА В БУРОВОЙ СКВАЖИНЕ | 2011 |
|
RU2482270C1 |
Использование: в измерительной аппаратуре, которая предназначена для контроля за траекторией ствола скважины или за положением бурильного инструмента при бурении скважин в процессе их строительства в нефтяной и газовой промышленности. Сущность изобретения: для выработки инклинометрических углов измеряют величины кажущихся ускорений и проекций угловой скорости по осям приборного трехгранника при помощи трех одноосных акселерометров и двух трехстепенных гироскопов, установленных в корпусе инклинометра и жестко с ним связанных, усиливают выходные сигналы гироскопов, преобразовывают их, а также выходные сигналы акселерометров в код, корректируют эти сигналы в зависимости от температуры внутри корпуса инклинометра, определяют величины инклинометрических углов при помощи вычислителя, размещенного в корпусе инклинометра, кодируют эти величины и передают на поверхность Земли по каналу связи. При этом входы вычислителя соединены через соответствующие преобразователи напряжение - код с выходами акселерометров, датчиков температуры и датчиков угла гироскопов через предварительные усилители, а выходы соединены через преобразователи код - ток с соответствующими датчиками моментов гироскопов, причем все усилители и преобразователи размещены в корпусе. Изобретение позволяет осуществить бурение без остановок, упрощает конструкцию устройства и уменьшает его габариты, а также увеличивает надежность устройства и расширяет возможность его применения в узких скважинах. 2 с.п. ф-лы, 3 ил.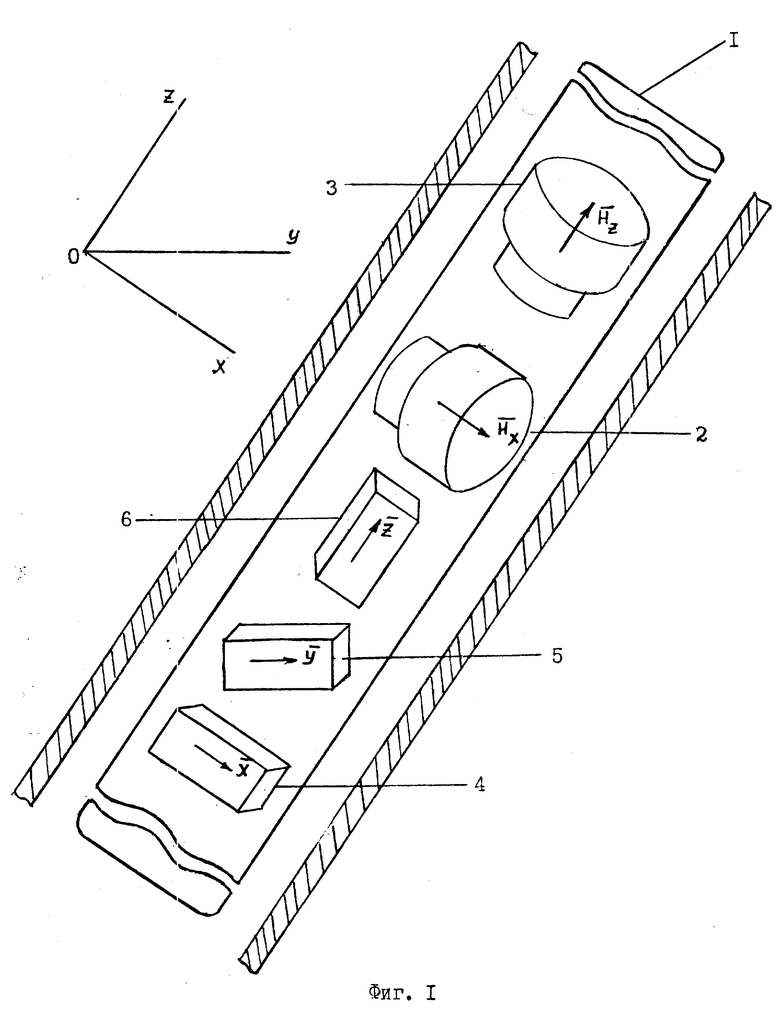
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Исаченко В.Х | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987, с | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US, патент, 4987684, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

