Изобретение относится к измерительной технике и может быть использовано при создании прецизионных систем автоматического регулирования и управления.
Наиболее близким по технической сущности является способ измерения параметров движения [1], заключающийся в том, что формируют временные интервалы, кратные или равные периодам питающего и выходного сигналов синусно-косинусного датчика положения, вырабатывают в каждом временном интервале, кратном или равном периоду выходного сигнала датчика положения, импульс с постоянной амплитудой, с длительностью, равной модулю разности между значением временного интервала, кратного или равного периоду выходного сигнала датчика положения, и значением временного интервала, кратного или равного периоду питающего сигнала датчика положения, и с полярностью, соответствующей знаку этой разности, по среднему значению сформированного импульсного сигнала судят о скорости перемещения.
Недостатком известного способа измерения являются ограниченные функциональные возможности, обусловленные невозможностью измерения ускорения перемещения.
Цель изобретения - расширение функциональных возможностей путем обеспечения возможности измерения как скорости, так и ускорения перемещения.
Цель достигается тем, что согласно известному способу измерения, при котором формируют временные интервалы, кратные или равные периодам питающего и выходного сигналов синусно-косинусного датчика положения, вырабатывают в каждом временном интервале, кратном или равном периоду выходного сигнала датчика положения, импульс с постоянной амплитудой, с длительностью, равной модулю разности между значением временного интервала, кратного или равного периоду выходного сигнала датчика положения, и значением временного интервала, кратного или равного периоду питающего сигнала датчика положения, и с полярностью, соответствующей знаку этой разности, по среднему значению сформированного импульсного сигнала судят о скорости перемещения, дополнительно вырабатывают в каждом временном интервале, кратном или равном периоду выходного сигнала датчика положения, импульс с постоянной амплитудой, с длительностью, равной модулю разности между значением временного интервала, кратного или равного периоду выходного сигнала датчика положения, и его предыдущим значением, и с полярностью, соответствующей знаку этой разности, по среднему значению сформированного импульсного сигнала судят об ускорении перемещения.
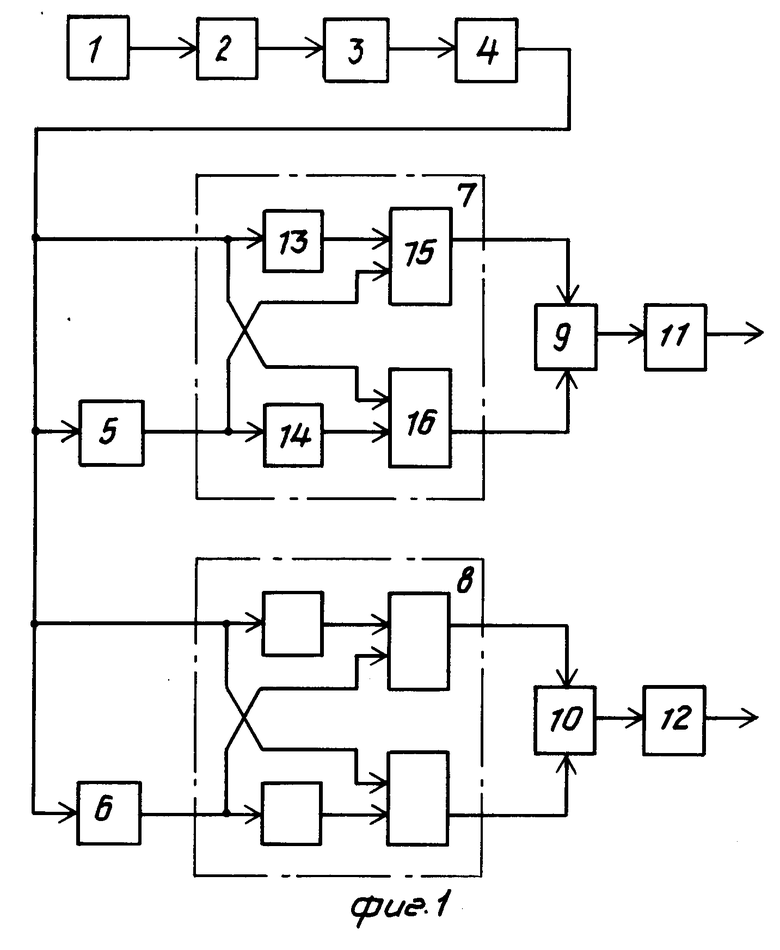
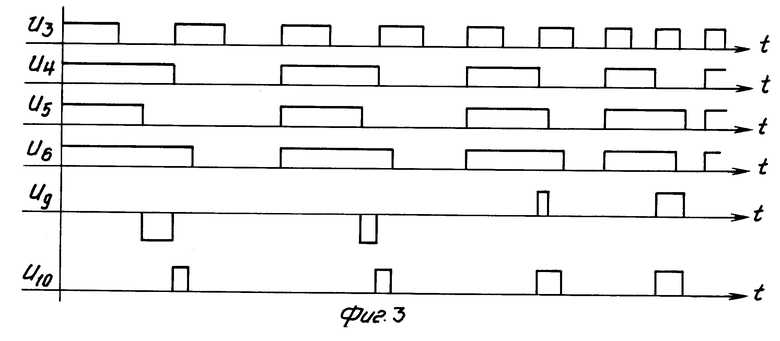
На фиг.1 представлена функциональная схема одного из возможных устройств, реализующая предлагаемый способ измерения параметров движения; на фиг. 2 - схема преобразователя импульсов; на фиг.3 - временные диаграммы, поясняющие работу устройства.
Устройство измерения содержит последовательно соединенные блок 1 питания, синусно-косинусный датчик 2 положения, компаратор 3, делитель 4 частоты, а также формирователь 5 опорных импульсов, преобразователь 6 импульсов, подключенные входами к выходу делителя 4 частот, первая и вторая логические схемы 7, 8 с двумя входами и с двумя выходами, подключенные первыми входами к выходу делителя 4 частоты, а вторыми входами - к выходам формирователя 5 опорных импульсов и преобразователя 6 импульсов соответственно, две схемы 9, 10 вычитания, подключенные неинвертирующими входами к первым выходам логических схем 7, 8 соответственно, инвертирующими входами - к вторым выходам указанных логических схем, а выходами - к входам осредняющих блоков 11, 12, выходы которых являются выходами устройства.
Каждая из логических схем 7, 8 содержит два инвертора 13, 14 и два элемента И 15, 16. Первые входы элементов 15, 16 подключены к выходам инверторов 13, 14 соответственно. Первым входом логической схемы являются вход инвертора 13, объединенный с вторым входом элемента 16, вторым входом - вход инвертора 14, объединенный с вторым входом элемента 15, а выходами - выходы элементов 15, 16.
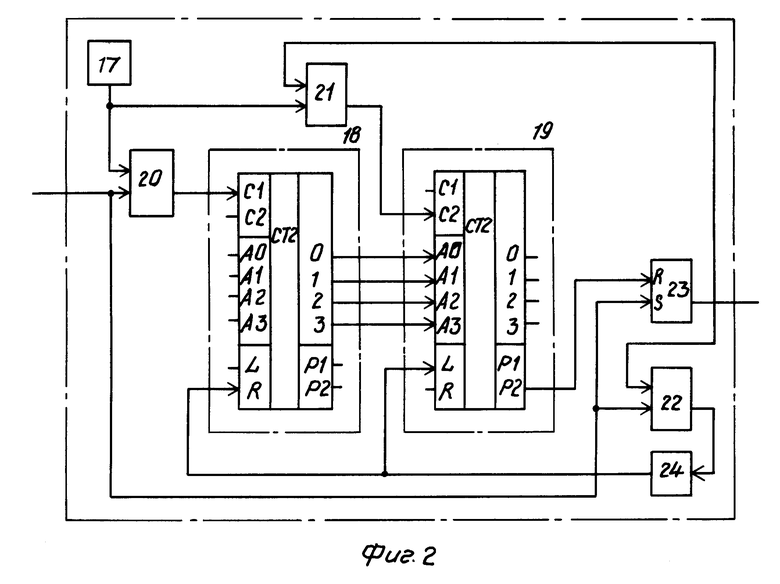
Преобразователь 6 импульсов содержит генератор 17 импульсов, счетчики 18, 19 импульсов, элементы И 20, 21, элемент ИЛИ-Е 22, триггер 23. Генератор 17 подключен через элемент И 20 к входу С1 для прямого счета счетчика 18 и через элемент 21 - к входу С2 для обратного счета счетчика 19. Счетчик 19 подключен входами А предустановки к выходам счетчика 18, а выходом Р2 заема - к входу установки нуля триггера 23. Выход триггера 23 подключен к второму входу элемента И 21, к первому входу элемента ИЛИ-НЕ 22 и является выходом преобразователя 6. Выход элемента ИЛИ-НЕ 22 подключен через формирователь 24 коротких импульсов к входу записи счетчика 19 и входу сброса счетчика 18. Входом преобразователя 6 является второй вход элемента И 20, объединенный с вторым входом элемента ИЛИ-НЕ 20 и входом установки единицы триггера 23.
Устройство работает следующим образом.
Блок 1 запитывает синусоидальным напряжением цепь возбуждения синусно-косинусного датчика 2 положения. Выходное напряжение датчика 2 положения поступает на вход компаратора 3, а затем на делитель 4. По переднему фронту каждого выходного импульса делителя 4 частоты формирователь 5 вырабатывает импульс длительностью, равной периоду питающего напряжения датчика 2 положения.
При движении в положительном направлении, соответствующем уменьшению периода выходного напряжения датчика 2 положения, на первом выходе логической схемы 7 появляются импульсы длительностью, равной разности периодов питающего и выходного напряжений датчика 2 положения, которые поступают на неинвертирующий вход схемы 9 вычитания. При движении в отрицательном направлении импульсы с длительностью, равной разности периодов выходного и питающего напряжений датчика 2 положения, появляются на втором выходе логической схемы 7 и поступают затем на инвертирующий вход схемы 9 вычитания. Блок 11 выделяет среднее значение выходных импульсов схемы 9 вычитания.
Выходной импульс делителя 4 частоты, длительность которого равна периоду выходного напряжения датчика 2 положения, поступает также на первый вход логической схемы 8 и на вход преобразователя 6 импульсов. Преобразователь 6 импульсов формирует на втором входе логической схемы 8 импульс с длительностью, равной предыдущему значению периода выходного напряжения датчика 2 положения.
Когда период выходного напряжения датчика 2 уменьшается с течением времени, то на первом выходе логической схемы 8 появляются импульсы с длительностью, равной модулю разности между текущим значением периода выходного напряжения датчика 2 и его предыдущим значением. Эти импульсы поступают на неинвертирующий вход схем 10 вычитания. Когда же с течением времени период выходного напряжения датчика 2 увеличивается, то аналогичные импульсы формируются уже на втором выходе логической схемы 8 и поступают на инвертирующий вход схемы 10 вычитания. Блок 12 выделяет среднее значение выходных импульсов схемы 10 вычитания.
Датчик 2 положения запитывается синусоидальным напряжением с частотой ωo. Выходное напряжение датчика 2 пропорционально функции sin( ωo t+ ϕ ), где ϕ - фазовый сдвиг, который определяется положением S подвижного элемента датчика 2.
Выходной сигнал датчика 2 положения принимает нулевые значения при положительной производной сигнала в моменты времени
ti=  , i = 1, 2, 3 ...,,
, i = 1, 2, 3 ...,,
где ϕi - фазовый сдвиг в моменты времени ti, i=1,2,3,... Следовательно, период выходного сигнала датчика 2 будет равен
Ti= ti- ti-1= To-  , i = 1, 2, 3,, (1)
, i = 1, 2, 3,, (1)
где To=  - период напряжения питания датчика 2.
- период напряжения питания датчика 2.
Скорость перемещения подвижного элемента датчика 2 с достаточной степенью точности равна отношению приращения по пути за некоторый интервал времени к величине этого интервала, т.е.
Vi= 
Поскольку фазовый сдвиг выходного напряжения датчика 2 пропорционален положению его подвижного элемента, то выражение скорости перемещения с учетом (1) преобразуется к виду
Vi= Koωo , (2)
, (2)
где Ко - коэффициент пропорциональности.
Входным сигналом осредняющего блока 11 является последовательность импульсов, следующих с периодом повторения, равным двум периодам выходного напряжения датчика 2. Эти импульсы имеют постоянную амплитуду. Длительность импульсов равна модулю разности периодов питающего и выходного напряжений датчика 2. Поскольку блок 11 выделяет среднее за период значение выходных импульсов, то согласно (2) выходной сигнал осредняющего блока 11 будет пропорциональным скорости перемещения.
Входным сигналом осредняющего блока 12 также является последовательность импульсов, следующих с периодом повторения, равным двум периодам выходного напряжения датчика 2. Импульсы также имеют постоянную амплитуду, но их длительность равна модулю разности между значением периода выходного напряжения датчика и его предыдущим значением. Согласно этому, выходной сигнал осредняющего блока 12 будет равен
U12= K1 , (3)
, (3)
где К1 - коэффициент пропорциональности. При относительно малых скоростях перемещений, т.е. когда V
V Koωo, (4) выходной сигнал осредняющего блока 12 будет с достаточной степенью точности пропорциональным ускорению, т.е.
Koωo, (4) выходной сигнал осредняющего блока 12 будет с достаточной степенью точности пропорциональным ускорению, т.е.
U12=  ai, где ai=
ai, где ai=  - ускорение перемещения подвижного элемента датчика 2.
- ускорение перемещения подвижного элемента датчика 2.
Преобразователь 6 импульсов работает следующим образом.
В исходном состоянии счетчик 18 содержит нулевой код, а счетчик 19 - код длительности предыдущего входного импульса преобразователя 6. С приходом входного импульса преобразователя 6 выходные импульсы генератора 17 начинают проходить на счетный вход С1 счетчика 18. По окончании входного импульса преобразователя 6 на выходе счетчика 18 сформируется код, пропорциональный длительности входного импульса преобразователя. Кроме того, передним фронтом входного импульса преобразователя 6 триггер 23 устанавливается в единичное состояние, и выходные импульсы генератора 17 начинают проходить на счетный вход С2 счетчика 19. По окончании счета на выходе Р2 заема счетчика 19 сформируется импульс, который установит триггер 23 в нулевое состояние, тем самым отключит счетный вход С2 счетчика 19 от генератора 17. На выходе преобразователя 6 сформируется импульс, длительность которого равна длительности предыдущего входного импульса преобразователя 6. После того, как входной и выходной сигналы преобразователя 6 становятся нулевыми, элемент ИЛИ-НЕ 22 с помощью формирователя 24 коротких импульсов запишет выходной код счетчика 18 на вход А предустановки счетчика 19 и затем осуществит сброс счетчика 18. Преобразователь 6 устанавливается в исходное состояние.
Использование: в измерительной технике при создании прецизионных систем автоматического регулирования и управления. Сущность изобретения: формируют временные интервалы, кратные или равные периодам питающего и выходного сигналов синусно - косинусного датчика положения, вырабатывают в каждом временном интервале, кратном или равном периоду выходного сигнала датчика положения, импульс с постоянной амплитудой, с длительностью, равной модулю разности между значением временного интервала, кратного или равного периоду выходного сигнала датчика положения, и значением временного интервала, кратного или равного периоду питающего сигнала датчика положения, и с полярностью, соответствующей знаку этой разности. По среднему значению сформированного импульсного сигнала судят о скорости перемещения, дополнительно вырабатывают в каждом временном интервале, кратном или равном периоду выходного сигнала датчика положения, импульс с постоянной амплитудой, с длительностью, равной модулю разности между значением временного интервала, кратного или равного периоду выходного сигнала датчика положения, и его предыдущим значением, и с полярностью, соответствующей знаку этой разности, по среднему значению сформированного импульсного сигнала судят об ускорении перемещения. Применение изобретения в прецизионном электроприводе позволяет улучшить динамические характеристики электропривода за счет обеспечения дополнительной возможности измерения ускорения перемещения путем создания дополнительного корректирующего контура обратной связи по ускорению перемещения. 3 ил.
СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ, заключающийся в формировании временных интервалов, кратных или равных периодам питающего и выходного сигналов синусно-косинусного датчика, формировании в каждом временном интервале, кратном или равном периоду выходного сигнала датчика, импульса с постоянной амплитудой, с длительностью, равной модулю разности временных интервалов, кратных или равных периодам выходного и питающего сигналов датчика, и с полярностью, соответствующей знаку этой разности, и определении скорости перемещения по среднему значению сформированного импульсного сигнала, отличающийся тем, что дополнительно вырабатывают в каждом временном интервале, кратном или равном периоду выходного сигнала датчика, импульс с постоянной амплитудой, с длительностью, равной модулю разности между значением временного интервала, кратного или равного периоду выходного сигнала датчика, и его предыдущим значением, и с полярностью, соответствующей знаку этой разности, и по среднему значению сформированного импульсного сигнала судят об ускорении перемещения.
| Способ измерения скорости перемещения | 1987 |
|
SU1515111A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
