Изобретение относится к радионавигации, точнее к устройствам инструментальной посадки летательных аппаратов, в том числе космически многоразового использования.
Известна микроволновая инструментальная система посадки, разработанная фирмой Singer Cegeral-Precision (США), содержащая азимутальную и угломестную антенны, механизмы и устройства переключения антенн, приемопередающие устройства и систему передачи команды.
Недостаток известного устройства заключается в том, что оно не обеспечивает высокой надежности и точности передачи угломерной информации особенно на этапе выравнивания и руления при заходе на посадку космического летательного аппарата многоразового использования.
Это объясняется тем, что в таком устройстве предусматривается манипуляция с частотами и сканированием лучей, причем сектор сканирования относительно мал.
Известно устройство, содержащее курсовой и угломестный радиомаяки, каждый из которых содержит передающее устройство, антенну и механизм ее сканирования.
Недостаток этого устройства заключается в том, что оно не обеспечивает необходимой степени надежности и точности передачи угломерной информации. Это объясняется тем, что применение механически сканирующих антенн ограничивает ширину линейного сектора и не позволяет осуществлять предпосадочный маневр летательного аппарата в широком секторе углов, что вызвано использованием в механическом приводе сканирования антенн торсионов. Ввиду разброса механических свойств торсионов невозможна синхронизация с очень высокой точностью временного разделения передачи азимутальных угломерных сигналов в широком секторе углов, а нелинейность закона закручивания торсиона ограничивает зону пропорционального наведения.
Цель изобретения - повышение надежности и точности передачи угломерной информации на этапе выравнивания и руления при заходе на посадку орбитального корабля многоразового использования.
Это достигается тем, что в устройстве для формирования азимутального и угломерного сигналов системы посадки орбитального летательного аппарата многоразового использования, включающем курсовой и глиссадный радиомаяки, каждый из которых содержит передающее устройство, антенну и ее приводные механизмы, датчик положения и блок синхронизации, приводные механизмы антенн выполнены в виде редукторных двигателей доворота, при этом введен блок управления, содержащий по меньшей мере три генератора тактовой частоты, три делителя частоты, три блока обнаружения делителей, мажоритарный блок совпадения и элемент И, причем выходы генератора тактовой частоты подключены к первым входам делителей частоты, к вторым их входам подключены выходы блоков обнуления делителей, входы которых параллельно подключены к выходу мажоритарного блока совпадения, первые выходы делителей частоты
подключены к элементу И, а вторые их выходы - к мажоритарному блоку совпадения, выход блока И подключен к первому входу блока синхронизации угломестного радиомаяка, выход которого подключен к редукторному двигателю доворота, второй вход блока синхронизации подключен к выходу датчика положения антенны, а выход мажоритарного блока совпадения подсоединен к первому входу блока синхронизации азимутального радиомаяка, выход которого подключен к редукторному двигателю доворота, второй вход блока синхронизации подключен к выходу датчика положения антенны, при этом входы передающих устройств подсоединены к выходам датчиков положения, а выходы - к антеннам.
Введение блока управления в устройство и его взаимосвязи с азимутальным и угломестным радиомаяками, снабженными вращающимися антеннами с блоками синхронизации и датчиками положения обеспечило формирование сигналов азимута и угла места на одной частоте с привязкой меток к эталонному опорному импульсному сигналу, его синхронизацию и формирование избирательным одновременно на те антенны, которые синфазны в данный момент времени.
Все это было осуществлено при полете орбитального летательного аппарата многоразового использования "Буран" в автоматическом режиме на этапе выравнивания и руления при заходе на посадку.
После вхождения летательного аппарата (ЛА) "Буран" в зону действия устройства для формирования азимутальных и угломестных сигналов системы посадки его бортовые устройства начинают принимать информацию об угловом положении в горизонтальной плоскости относительно оси ВПП (взлетно-посадочная полоса) в пределах 30о и угле места.
Передача информации велась на одной несущей частоте при временном разделении (кодировании) сигналов азимута и угла места, формируемых кодовыми парами импульсов.
Временной интервал между парами связывался с угловым положением антенн выражением:
Ti= To+Sϕi , где То - начальный интервал равный 60 мкс, соответствующий направлению антенны на ось ВПП;
S - крутизна, мкс/град (определяет изменение интервала при повороте антенны);
ϕi - угол относительно оси ВПП.
Временная расстановка излучаемых сигналов обеспечивалось привязкой начала излучения азимутальных и угломестных сигналов к сигналам, формируемым блоком управления. В каждом радиомаяке формировался сигнал в тот момент времени, когда антенна занимала положение, соответствующее началу сектора обзора. Это положение геометрически привязано к зоне действия радиомаяка относительно оси ВПП для азимутального или линии горизонта для угломестного.
Блок синхронизации обеспечивал выявление величины взаимного рассогласования между сигналами, поступавшими от блока управления, и сигналами начала сектора обзора. В соответствии со знаком рассогласования двигатель доворота в радиомаяке, управляемый блоком синхронизации путем увеличения или замедления скорости вращения антенны через дифференциальный редуктор, обеспечивает совмещение сигналов от блока управления и сигнала начала сектора обзора от радиомаяка. При расхождении этих сигналов цикл повторялся. При совпадении сигналов воздействия на двигатель доворота прекращалось и стабилизация скорости обеспечивалась основным двигателем, снабженным центробежным регулятором скорости.
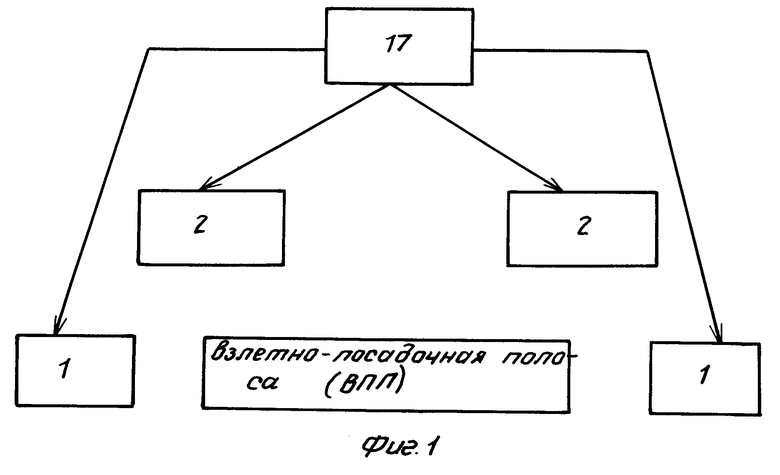
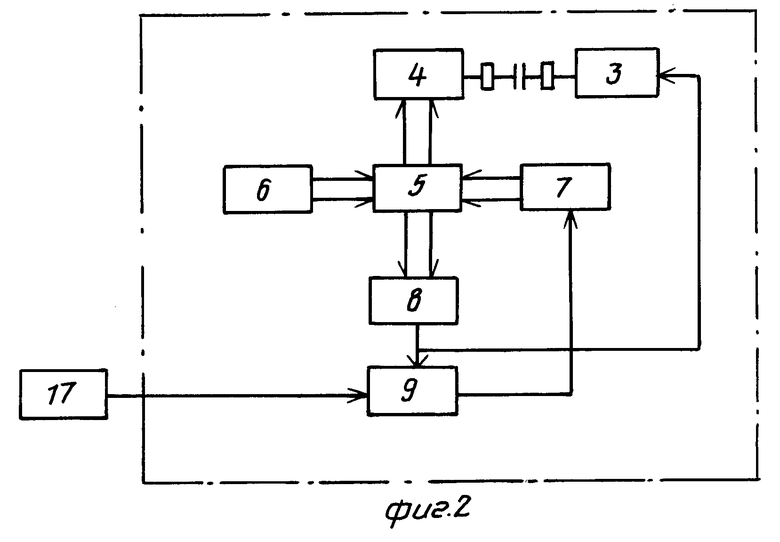
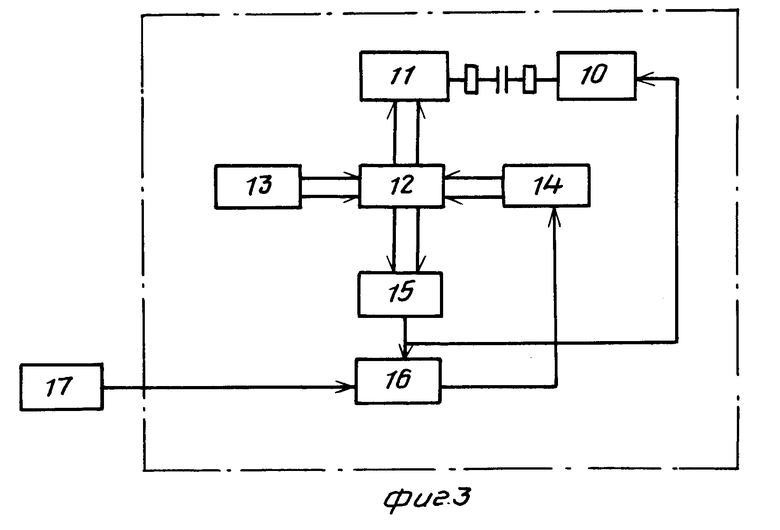
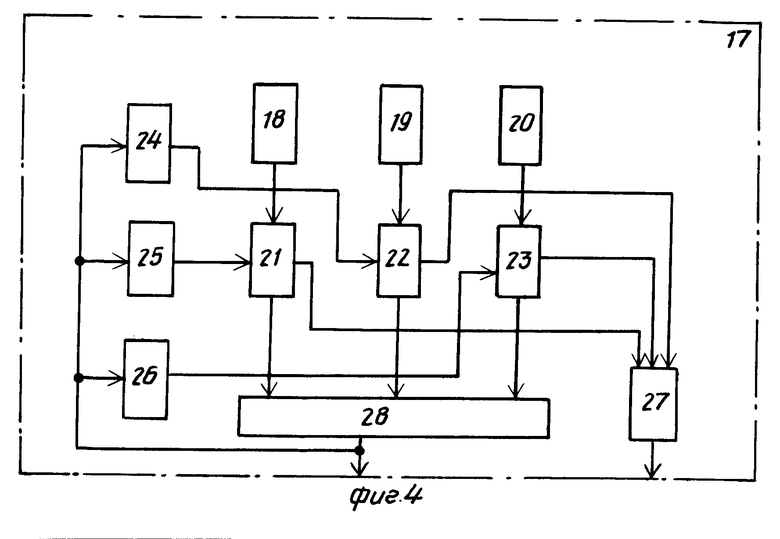
На фиг. 1 представлена структурная схема устройства для посадки орбитального летательного аппарата многоразового использования (азимутально-угломестный радиомаяк); на фиг. 2 - структурная схема азимутального радиомаяка; на фиг. 3 - структурная схема угломестного радиомаяка; на фиг. 4 - структурная схема блока управления.
Устройство содержит по меньшей мере два азимутальных 1 и два угломестных 2 радиомаяка, установленных на летном поле аэродрома на расстоянии 2-5 км один от другого.
Азимутальный радиомаяк 1 содержит передающее устройство 3, антенну 4, редуктор ее вращения 5, основной двигатель 6, двигатель доворота 7, датчик положения 8, блок синхронизации 9.
Угломестный радиомаяк содержит передающее устройство 10, антенну 11, редуктор ее вращения 12, основной двигатель 13, двигатель доворота 14, датчик положения 15, блок синхронизации 16.
Блоки синхронизации 9 и 16 подсоединены к блоку управления 17, размещенному на командно-диспетчерском пункте аэродрома.
Блок управления 17 содержит три генератора тактовой частоты 18-20, подключенных к первым входам делителя частоты 21-23 соответственно.
Блок управления содержит также блоки обнуления делителей 24-26, выходы которых соединены с вторыми входами делителей частоты 21-23.
Первые выходы делителей частоты 21-23 соединены с входами элемента И 27, а вторые их выходы соединены с входами мажоритарного блока совпадения 28, к выходу которого параллельно подсоединены входы блоков обнуления делителей 24-26.
Выход мажоритарного блока совпадения 28 соединен с первым входом блока синхронизации 9 азимутального радиомаяка 1, а элемент И 27 соединен с первым входом блока синхронизации 16 угломестного радиомаяка 2. При этом выход блока синхронизации 9 соединен с двигателем доворота 7, второй вход блока синхронизации соединен с выходом датчика положения 8, а выход блока синхронизации 16 соединен с двигателем доворота 14, второй вход блока синхронизации соединен с выходом датчика положения 15.
Устройство работает следующим образом.
При запуске устройства генераторы тактовой частоты 18-20, расположенные в блоке управления 17, генерируют сигналы, которые поступают на делители частоты 21-23, расположенные там же.
С выходов делителей частоты 21-23 импульсные сигналы, поделенные до частоты 5 Гц, подаются на мажоритарный блок совпадений 28, который реализует операцию "2 или 3". С выхода мажоритарного блока совпадений 28 импульсы частотой 5 Гц поступают по линиям связи к азимутальным радиомаякам 1, а с промежуточных выходов делителей 21-23 через элемент И 27 по линиям связи КК к угломестным радиомаякам 2. Азимутальные 1 и угломестные 2 радиомаяки расположены парами и обеспечивают информационными сигналами любое из двух направлений захода орбитального летательного корабля на взлетно-летательную полосу. В каждой паре радиомаяков 1 и 2 на выбранном направлении посадки один работает на антенну и излучает сигналы в пространство, а другой находится в горячем резерве и работает на эквивалент антенны.
Сигнал 5 Гц, поступающий по линии связи, попадает в блоки синхронизации 9 и 16, на которые подается и сигнал с датчиков положения антенны 8 и 15.
В блоках синхронизации 9 и 15 происходит сравнение временного положения импульса, поступившего от блока управления 17, и импульса положения антенн 4 и 11. Выявленное временное рассогласование преобразуется в напряжение сигнала управления с учетом знака рассогласования. Сигнал от блоков синхронизации 9 и 16 поступает на двигатели доворота 7 и 14, связанные дифференциально с редукторами 5 и 12. В зависимости от знака рассогласования сигнала управления скорость вращения антенн увеличивается или уменьшается, чем достигается совмещение во времени сигнала частотой 5 Гц от блока управления 17 и сигналов от датчиков положения антенн 8 и 15.
С датчиков положения антенн 8 и 15, являющихся преобразователями "угол-код", сигналы поступают также на передающие устройства 3 и 10, где преобразуются из цифрового кода во временной код, соответствующий угловому положению антенн.
Видеоимпульсы временного кода модулируют передающие устройства 9 и 10 и через антенны 4 и 11 излучаются в пространство.
Работа всех угломестных и азимутальных радиомаяков происходит аналогично.
Тенико-экономическая эффективность предлагаемого способа и устройства для его осуществления заключается в повышении надежности посадки орбитального летательного аппарата многоразового использования. Учитывая то обстоятельство, что посадка осуществляется в бездвигательном режиме, любые отклонения по курсу или глиссаде могут привести к аварийной ситуации с большим ущербом.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018855C1 |
| РАДИОМАЯК ДЛЯ ЗАХОДА И ПОСАДКИ ВЕРТОЛЕТОВ НА ОГРАНИЧЕННУЮ ПЛОЩАДКУ В ОТСУТСТВИЕ ВИДИМОСТИ ЗЕМЛИ | 1993 |
|
RU2081428C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU2018858C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ | 1990 |
|
RU1753837C |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2363009C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ СИСТЕМЫ ПОСАДКИ | 1990 |
|
SU1760868A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ ЛЕТАТЕЛЬНОГО АППАРАТА В СИСТЕМАХ ВТОРИЧНОЙ РАДИОЛОКАЦИИ | 1992 |
|
RU2018867C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
| КОЛЬЦЕВАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 1990 |
|
RU2019006C1 |
Использование: радионавигация. Сущность изобретения: устройство для формирования азимутального и угломестного сигналов системы посадки летательного аппарата содержит два азимутальных радиомаяка, два угломестных радиомаяка, каждый из которых содержит одно передающее устройство, одну антенну, один редуктор вращения, один основной двигатель, один двигатель доворота, один датчик положения, один блок синхронизации и блок управления, включающий три генератора тактовой частоты, три делителя частоты, три блока обнуления делителей, один элемент И и один магистральный блок совпадения. 4 ил.
УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ АЗИМУТАЛЬНОГО И УГЛОМЕСТНОГО СИГНАЛОВ СИСТЕМОЙ ПОСАДКИ ОРБИТАЛЬНОГО ЛЕТАТЕЛЬНОГО АППАРАТА МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ, содержащее курсовой и глиссадный радиомаяки, каждый из которых содержит передающее устройство, сканирующую антенну и приводные механизмы антенны, датчик положения антенны и блок синхронизации, отличающееся тем, что приводные механизмы антенны выполнены в виде редукторных двигателей доворота антенн и введен блок управления, содержащий по меньшей мере три генератора тактовой частоты, три делителя частоты, три блока обнуления делителей, мажоритарный блок совпадения и элемент И, выходы генератора тактовой частоты подключены к первым входам делителей частоты, к вторым входам которых подключены выходы блока обнуления делителей, входы которых параллельно подключены к выходу мажоритарного блока совпадения, первые выходы делителей частоты подключены к входам элемента И, а вторые выходы - к входам мажоритарного блока совпадения, выход элемента И подключен к первому входу блока синхронизации угломестного радиомаяка, выход которого соединен с редукторным двигателем доворота антенн, а выход мажоритарного блока совпадения соединен с первым входом блока синхронизации азимутального радиомаяка, выход которого соединен с редукторным двигателем доворота его антенны.
| Microwave Sustems Nens, 1982, N X, N 9, c.128-130, 132, 133. |
