Предлагаемое изобретение относится к радиотехническим средствам авиационной, космической техники, системам диспетчеризации и управления движением в атмосфере Земли и может использоваться в спускаемых космических объектах или их аппаратах, системах посадки, системах управления движением в атмосфере Земли.
Из источников литературы [4, 5, 6, 7, 8, 9, 11] известны определения воздушного судна и спускаемого аппарата.
Спускаемый аппарат (СА) - часть космического аппарата для спуска с торможением и мягкой посадки на Землю или др. небесное тело. На пилотируемых космических кораблях спускаемый аппарат - кабина, в которой находится экипаж, на автоматических летательных аппаратах в спускаемых аппаратах размещаются приборы [9].
Космический объект - тело искусственного происхождения, находящееся в околоземном пространстве [11].
Воздушное судно (ВС) - летательный аппарат, поддерживаемый в атмосфере за счет взаимодействия с воздухом, отличного от взаимодействия с воздухом, отраженным от земной поверхности. К воздушным судам не относятся ракеты, космические аппараты, суда на воздушной подушке, экранопланы, экранолеты, метеорологические шары, беспилотные неуправляемые аэростаты без полезного груза [8].
Исходя из известных определений и классификаций спускаемые космические объекты или их аппараты не относятся к воздушным судам, а радиотехнические средства и способы захода на посадку ВС и СА различны.
Рассматривая аспекты функционирования бортового и наземного оборудования, обеспечивающего выполнение посадки воздушного судна, стоит отметить:
На большинстве современных аэродромов траектории захода на посадку воздушного судна в горизонтальной и вертикальной плоскостях формируются равносигнальными зонами электромагнитных излучений наземных курсового (КРМ) и глиссадного (ГРМ) радиомаяков, пересечение которых представляет заданные горизонтальную и вертикальную траектории захода на посадку. Текущая дальность от воздушного судна до начала взлетно-посадочной полосы (ВПП) определяется дальномерным радиомаяком (ДРМ), входящим в состав наземного оборудования. Подробное описание процессов и процедур формирования заданной траектории захода на посадку с помощью КРМ, ГРМ и ДРМ приведены в разделе 5.6. Принцип действия каналов посадки и индикации в системах типа РСБН, главах 7.8 справочника [18], главе 2 книги [19], разделе 2.7 книги [20].
Описание особенностей функционирования бортового пилотажно-навигационного оборудования при заходе на посадку приведено в главе 3 книги [19], главах 2 и 8 книги [20]. В процессе реализации автоматического режима захода на посадку используют известные законы управления движением центра масс через управление креном и тангажем воздушного судна. В книге [20] приведены примеры законов автоматического управления воздушного судна по крену и тангажу, в которых, наряду с другими сигналами, используются сигналы отклонения ВС от заданной траектории по курсу εк и глиссаде εr. Для реализации ручного режима захода на посадку на соответствующих индикационных приборах одновременно индицируют в виде вертикально и горизонтально ориентированных планок сигнала отклонения от заданной траектории по курсу εк и глиссаде εr.
В отличие от воздушного судна, при штатном спуске на высотах 130-170 км, поле разделения с космическим кораблем СА, спускаемые космические объекты без разделения, под действием аэродинамических сил и двигателей управления спуском СА ориентируется лобовым щитом к набегающему потоку и на высотах ниже 84-82 км происходят развороты СА по крену в автоматическом (АУС) или ручном (РУС) режимах управления, обеспечивающие посадку СА в расчетном районе.
При отказе автоматического или ручного режимов управления спуском на борту СА может быть сформирован баллистический спуск (срыв на БС), который осуществляется закруткой СА относительно вектора скорости с угловой скоростью 13°/c. В зависимости от времени перехода в режим баллистического спуска точка приземления СА в режиме баллистического спуска отстоит от расчетной точки на расстоянии от 0 до 450 км.
Помимо этого, на высотах 90-40 км происходит интенсивное аэродинамическое торможение СА и образование вокруг СА «плазменной каверны» с температурой до 2000°С. Во время образования «плазменной каверны» на 5-6 минут нарушается радиосвязь с СА. Далее на высоте 8,5 км тормозной парашют отстреливается от СА, извлекая из парашютного контейнера основной парашют, который в течение 11 сек полностью наполняется и на котором осуществляется дальнейшее снижение СА.
Для обеспечения поиска СА и двухсторонней связи космонавтов с экипажами поисковых самолетов, вертолетов и поисково-эвакуационных машин на участке парашютного спуска и после посадки используется бортовая радиоаппаратура КВ-пеленга, аварийная переносная УКВ радиостанция.
В состав радиоаппаратуры КВ-пеленга входят:
2 УКВ передатчика (основной и резервный) на частоте -121,75 (ЧМ)/121,5 МГц (AM), 2 УКВ приемника симплексных (осн. и резерв.) на частоте -121,75 МГц 2 УКВ приемника дуплексных (осн. и резерв.) на частоте -130,167 МГц, 2 КВ-передатчика на частотах - 8,364 и 18,060 МГц. Выходная мощность УКВ передатчиков - 3 Вт в режиме ЧМ и 1 Вт в режиме AM. Выходная мощность KB передатчиков - 6 Вт и 11 Вт.
Приемно-передающая щелевая УКВ антенна установлена на люке-лазе СА. До высоты 10 км УКВ передатчик работает на частоте 121,75 МГц, на высоте 10 км, происходит переход УКВ передатчиков на частоту 121,5 МГц. Передатчики работают поочередно по 2 минуты каждый, излучая амплитудно-модулированный сигнал, представляющий собой 3-х кратное повторение букв «А Н» азбуки Морзе (продолжительность 5 секунд с 10 секундным интервалом). УКВ приемники на частоте 130,167 МГц переходят в режим амплитудной модуляции.
KB передатчики на частотах 8,364 и 18,060 МГц работают непрерывно до приземления СА, излучая буквы «АН» в режиме амплитудной телеграфии.
Режим работы КВ-маяков:
на частоте 8,364 МГц - 3 часа 12 минут работает непрерывно;
на частоте 18,060 МГц - по программе: 2 минуты работа, 6 минут перерыв.
По истечении 3 часов в работу включаются одновременно оба маяка по циклограмме:
на частоте 8,364 МГц - 10 минут работа, 6 минут перерыв;
на частоте 18,060 МГц - 2 минуты работа, 14 минут перерыв.
Для связи с поисково-спасательными подразделениями после посадки экипаж может также использовать переносную станцию спутниковой связи «Иридиум» и устройство GPS с автономными источниками питания.
Общей проблемой современной пилотируемой космонавтики является создание канала связи (радиоканала) спускаемого космического объекта или его аппарата в плотных слоях атмосферы Земли по баллистической или расчетной траектории, а также по любой другой, особенно в нештатной ситуации с пунктом управления ЦУПом (центральный пункт управления - пункт диспетчерского контроля, мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли). Трудность в том, что вокруг спускаемого космического объекта или его аппарата в силу большой скорости спуска (до 4 км/с), лобовые наружные слои теплозащиты спускаемого аппарата сублимируют, т.е. испаряются, высокая температура в создаваемой ударной волне ионизирует молекулы воздуха в атмосфере - возникает эффект «плазменной каверны». «Плазменная каверна» охватывает большую часть спускаемого аппарата и как экраном закрывает движущийся в атмосфере спускаемый аппарат и тем самым лишает KB и УКВ связи по линии борт-земля (между СА и ЦУПом). Аналогичная картина происходит и с внешним наблюдением за СА, электромагнитные лучи РЛС, отражаясь от «плазменной каверны», приобретают турбулентность, т.е. вихревое состояние, поэтому практически невозможно определить точные координаты спускаемого космического объекта или его аппарата. Поэтому спускаемый аппарат летит в режиме радиомолчания до момента гашения скорости, т.е. практически до открытия тормозных парашютов.
Расположение центра масс (центровка) спускаемого аппарата обеспечивает устойчивое положение спускаемого аппарата в воздушном потоке (днищем вперед), а также несимметричное обтекание спускаемого аппарата.
Благодаря описанной проблематике и исходя из необходимости обеспечения непрерывности поступления данных о координатах СА, минимизации ошибок определения координат СА наземными средствами по отражениям от «плазменной каверны», формулируется решаемая задача изобретения - повышение точности определения координат спускаемого космического объекта или его аппарата в атмосфере Земли.
Базируясь на известных теоретических и практических аспектах прохождения радиоволн частотой 1 ГГц±1 кГц, соответствующей частотному диапазону автоматического зависимого наблюдения, через плазму [16, 17], известные системы и методы автоматизированного зависимого наблюдения [12], известный комплекс средств приема и обработки сообщений от воздушных судов системы автоматического зависимого наблюдения [13] не предназначены для приема данных автоматического зависимого наблюдения спускаемых космических объектов или их аппаратов в атмосфере Земли.
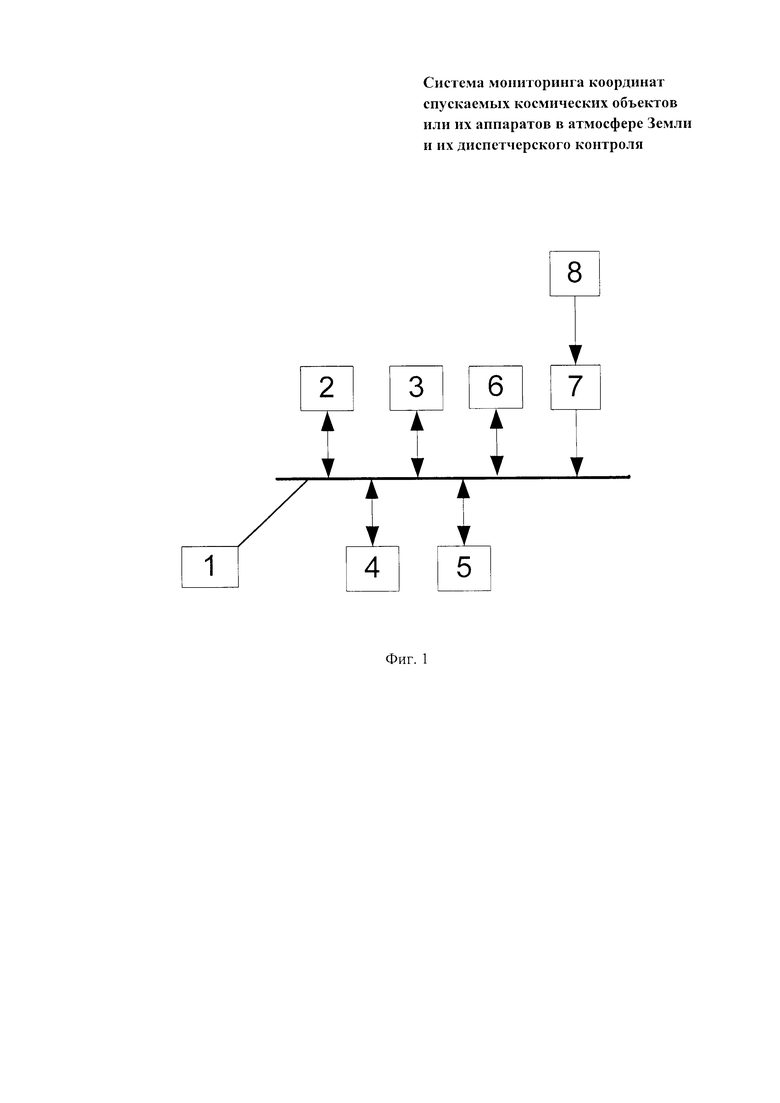
Наиболее близкой заявляемой системе является автоматизированная система диспетчерского контроля за полетами воздушных судов с возможностью использования информации от системы автоматического зависимого наблюдения [14], представленная на фиг. 1 и содержащая локальную вычислительную сеть (1), АРМ планирования полетов (2), АРМ контроля использования воздушного пространства (3), комплекс средств обмена данными с наземным комплексом обработки данных (4), устройство сопряжения с телефонными и телеграфными каналами (5), сервера базы данных маршрутов полетов и номеров воздушных судов (6), устройство сопряжения (7) и приемник системы автоматического зависимого наблюдения (8).
Данная система не предназначена для диспетчерского контроля ЦУПом за полетами спускаемых космических объектов или их аппаратов и не обеспечивает определения координат спускаемого космического объекта или его аппарата в атмосфере Земли.
В основу изобретения положена задача повышения точности определения координат спускаемого космического объекта или его аппарата в атмосфере Земли при штатной посадке, при баллистическом спуске, при досрочном (срочном) спуске, при различных условиях полета.
Данная задача достигается введением в бортовую аппаратуру (бортовой радиомаяк с антенной, бортовой блок навигации) спускаемых аппаратов, маневрирующих космических аппаратов в атмосфере Земли бортового модуля автоматического зависимого наблюдения (аббревиатура в английской транскрипции ADS, аббревиатура в русской транскрипции АЗН) со средствами приема дополнительных данных дифференциальной коррекции спутниковой навигационной системы и введением средств временной синхронизации в состав наземных приемников системы автоматического зависимого наблюдения для их реализации в составе многопозиционной системы наблюдения (аббревиатура в английской транскрипции WAM, MLAT, аббревиатура в русской транскрипции МПСН).
В отличие от наземных средств приема дополнительных данных дифференциальной коррекции спутниковой навигационной системы, использующих передачу данных корректирующих поправок по линии передачи ОВЧ-диапазона (108-117, 975 МГц) от соответствующей наземной станции, оценивающей сигналы спутниковой группировки, бортовые системы используют передачу данных корректирующих поправок через геостационарные спутники, что увеличивает вероятность приема корректирующих поправок и обработки данных бортовыми системами СА при нарушении радиосвязи со СА во время нахождения в «плазменной каверне».
Помимо этого бортовые средства приема дополнительных данных дифференциальной коррекции спутниковой навигационной системы, при достаточном количестве наблюдаемых навигационных спутников (не менее 6) на базе алгоритмов автономного контроля целостности (RAIM) осуществляют анализ информации со спутников и ее исключение при расчетах навигационных характеристик в случае отказа одного из навигационных спутников.
Стационарная установка приемников системы автоматического зависимого наблюдения позволяет принимать помимо прочих штатных сигналов сигналы точного времени спутниковой навигационной системы, а так как координаты установки приемника АЗН точно известны и неизменны, то, получив во фрейме принятых данных истинные дальности до спутника, задержка сигналов при распространении сигнала от спутника до приемника вычисляется сразу и получаем таким образом привязку ко времени с очень высокой точностью.
Внутренняя синхронизация временных шкал приемников АЗН в составе МПСН состоит в непрерывной проверке расхождения внутренних часов АЗН с сигналами точного времени на заданном как эталонный (также известный как временной сервер) устройстве приема и корректировки шкал приемников АЗН по отношению к временному серверу. Расхождение во времени в МПСН не должно превышать 100 мс.
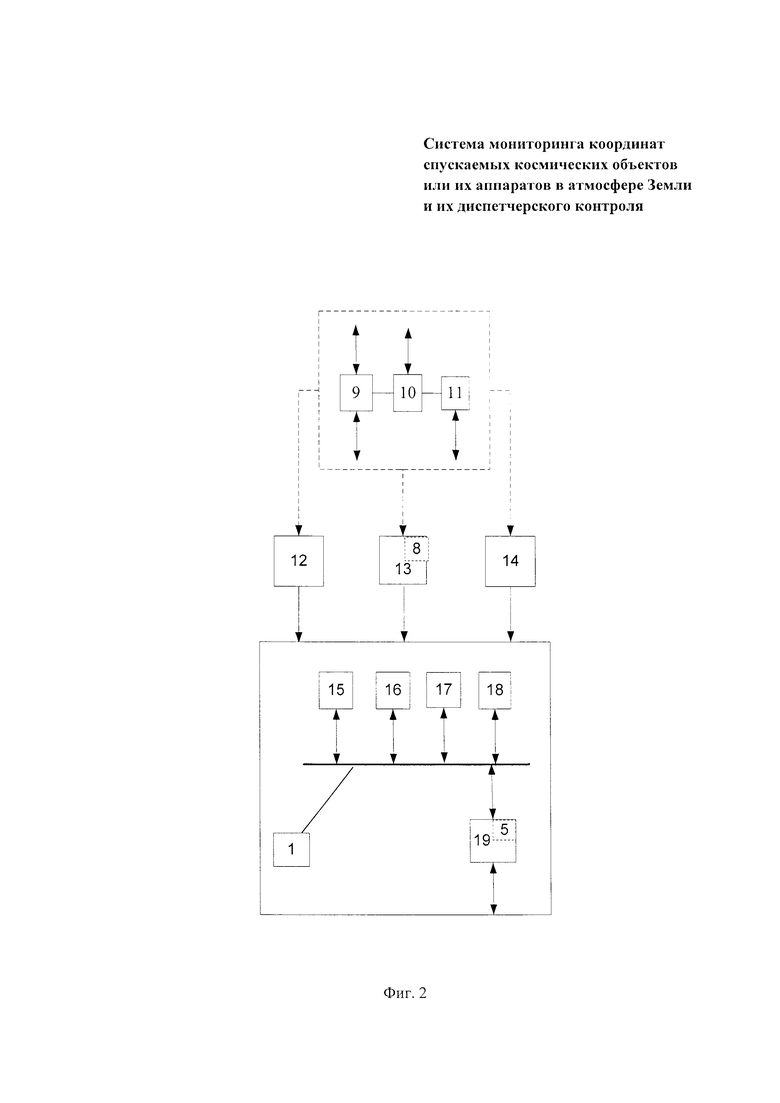
На фиг. 2 представлена структурная схема системы мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля.
Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля состоит из бортовой аппаратуры, содержащей последовательно соединенные бортовой радиомаяк с антенной (9), бортовой модуль автоматического зависимого наблюдения (АЗН) (10) со средствами приема дополнительных данных дифференциальной коррекции спутниковой навигационной системы и бортовой блок навигации (11) и наземной аппаратуры, содержащей связанные между собой наземные радиолокационные станции (РЛС) (14), пеленгаторы радиомаяков (12), наземные приемники АЗН со средствами временной синхронизации (13) и систему сбора, обработки и отображения информации, состоящую из связанных между собой: локальной вычислительной сети (1), устройства и/или устройств сопряжения с локальной вычислительной сетью внешних источников информации (15), автоматизированных рабочих мест (АРМ) группы руководства полетами и/или диспетчеров на базе ПЭВМ (16), комплекса средств обмена данными с потребителями с устройством сопряжения с телефонными, телеграфными каналами обмена информации и волоконно-оптическими линиями связи (19), баз данных на сервере (18) (статических и динамических), специального программно-математического обеспечения (17).
Предлагаемая система работает следующим образом.
Бортовой модуль АЗН со средствами приема дополнительных данных дифференциальной коррекции спутниковой навигационной системы (10), бортовой радиомаяк с антенной (9) передают в установленном формате и по установленным правилам (процедурам) данные о местоположении и высоте спускаемых космических объектов или их аппаратов в атмосфере Земли. Бортовой модуль АЗН на частоте 1090 МГц и/или 978 МГц, с интервалом от 1 до 10 с передает данные о местоположении в составе расширенного сквиттера (extended squitter), принимаемого наземными средствами приема, также, после выхода из «плазменной каверны», бортовой радиомаяк с антенной может передавать на полосе частот 406-406,037 МГц через систему КОСПАС-SARSAT и/или на других частотах, сигналом, принимаемым непосредственно средствами приема.
Информация от спускаемых космических объектов или их аппаратов в атмосфере Земли, принятая наземными приемниками системы автоматического зависимого наблюдения со средствами временной синхронизации (13) и/или пеленгатором радиомаяков (12), и/или наземной РЛС (14), через устройство сопряжения с локальной вычислительной сетью внешних источников информации (15), поступает в базы данных (18) (статические и динамические) на сервере системы сбора, обработки и отображения информации, где происходит поиск траектории спуска, полета в атмосфере Земли и дополнительной информации о спускаемом аппарате (идентификационный номер спускаемого аппарата, аварийные и прочие сигналы, остаток топлива (если конструкция предполагает его наличие на борту, во время спуска)).
В случае если информация от спускаемых космических объектов или их аппаратов присутствует в базах данных (18), то она вместе с дополнительной информацией, полученной от приемников системы АЗН со средствами временной синхронизации (13), поступает в локальную сеть (1) на АРМ (16).
Если дополнительная информация о спускаемом аппарате или маневрирующем космическом аппарате в базах данных (18) отсутствует, то в локальную сеть (1) выдается только информация о спускаемом аппарате или маневрирующем космическом аппарате, полученная от приемников системы АЗН со средствами временной синхронизации (13).
Построение прогнозного трека траектории спуска, полета в атмосфере Земли спускаемого аппарата или маневрирующего космического аппарата осуществляется специальным программно-математическим обеспечением (17) на сервере и по результатам расчетов поступает в локальную сеть (1) на АРМ (16). Данные о траектории спуска, полета в атмосфере Земли, дополнительной информации, прогнозном треке траектории спуска, полета в атмосфере Земли из локальной сети (1), через комплекс средств обмена данными с потребителями (19), поступает заинтересованным потребителям информации.
Для обеспечения наблюдения траектории спуска, полета спускаемых космических объектов или их аппаратов в атмосфере Земли на площадях, превышающих зону устойчивого приема одного из наземных приемников системы АЗН со средствами временной синхронизации (13), наземные приемники системы АЗН со средствами временной синхронизации (13) реализуются в составе широкозонной многопозиционной системы наблюдения, а временная синхронизация принимаемых сигналов бортового модуля АЗН со средствами приема дополнительных данных дифференциальной коррекции спутниковой навигационной системы (11) реализуется на встроенных в наземные приемники системы АЗН средствах временной синхронизации.
Для обеспечения наблюдения спускаемых космических объектов в районе аэродрома, взлетно-посадочной полосы, специально подготовленной площадки, зоне посадки, перемещения по поверхности приемники системы автоматического зависимого наблюдения реализованы в составе аэродромной многопозиционной системы наблюдения.
С целью повышения точности определения координат в состав бортового модуля АЗН (10) включено функциональное дополнение ГНСС - бортовая локальная контрольно-корректирующая станция (ЛККС).
Локальная контрольно-корректирующая станция - это бортовая или наземная система дифференциальной коррекции. Сам принцип дифференциальной коррекции и дифференциальный режим работы спутниковой навигационной системы описан в литературе [15]. Отметим, что географические координаты оборудования локальной контрольно-корректирующей станцией заранее известны с высокой степенью точности. За счет сопоставления фактических данных от бортового блока навигации (11) и данных из фрейма спутниковой трансляции сообщений ЛККС формируются данные дифференциальных поправок (дифференциальной коррекции).
Таким образом, предлагаемая система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля обеспечивает повышение точности, непрерывности определения координат спускаемого космического объекта или его аппарата в атмосфере Земли.
При этом система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли направлена на работу со всеми источниками информации о координатах наблюдаемых спускаемых космических объектов или их аппаратов как во время нахождения их в «плазменной каверне», так и после выхода из нее. Это позволяет при осуществлении спуска решить актуальную для современной пилотируемой космонавтики задачу непрерывного определения координат спускаемых космических объектов или их аппаратов на всех высотах нахождения в атмосфере Земли, а также повысить интенсивность и информативность информации, выдаваемой заинтересованным потребителям.
Прохождение радиоволн частот АЗН (1 ГГц±1 кГц) через плазму, образующую «плазменную каверну» [16, 17], дает положительные результаты для передачи борт-земля фактических координат, измеренных на борту СА, что в отличие от внешних радиолокационных наблюдений за координатами спускаемых космических объектов или их аппаратов на всех высотах нахождения в атмосфере Земли по турбулентным отражениям радиолокационных сигналов обладает большей погрешностью и меньшей вероятностью уверенного приема радиотехническими средствами.
Также предлагаемое изобретение является актуальным при поисково-спасательном обеспечении. Возможность точного определения координат во время спуска в атмосфере Земли обеспечивает возможность более эффективной диспетчеризации средств, задействованных в поисково-спасательном обеспечении и сокращении временных и материальных затрат на проведение поисково-спасательного обеспечения спускаемых космических объектов или их аппаратов в атмосфере Земли по баллистической траектории или их отклонения от расчетной траектории, а также в случае нештатной ситуации.
Источники литературы
1. Приказ аэронавигационной службы от 3 апреля 2007 года N 22.
2. Приказ Росаэронавигации от 21.11.07 №112.
3. http://oaoniikp.ru/prod2.php?id=71.
4. "Воздушный кодекс Российской Федерации" от 19.03.1997 N 60-ФЗ (ред. от 13.07.2015) (с изм. и доп., вступ. в силу с 24.07.2015).
5. Словарь по международной гражданской авиации.
6. ИКАО DOC 9713, Третье издание, 2007 г., стр. 1-55.
7. Космический объект // Космонавтика: энциклопедия; Главный редактор В.П. Глушко. - Москва: «Советская энциклопедия», 1985 - С. 189.
8. Словарь международного права (дипломатическая академия МИД России. 3-е издание, переработанное и дополненное. Отв. ред. С.А. Егоров// "Статут", 2014.
9. Большой Энциклопедический словарь. 2000.
10. Кодекс Международной авиационной федерации.
11. ГОСТ Р 25645.167-2005 Космическая среда (естественная и искусственная). Модель пространственно-временного распределения плотности потоков техногенного вещества в космическом пространстве.
12. «Automatic dependant surveillance systems and methods» (Системы и методы автоматизированного зависимого наблюдения) (US 8072374 В2, дата публикации 6 дек. 2011).
13. «Комплекс средств приема и обработки сообщений от воздушных судов системы автоматического зависимого наблюдения» (патент 124408 (20.08.2012) Опубликовано: 20.01.2013).
14. «Автоматизированная система диспетчерского контроля за полетами воздушных судов с возможностью использования информации от системы автоматического зависимого наблюдения (патент 150701 (13.05.2014), опубликовано: 20.02.2015).
15. Дворкин В.В. Принцип дифференциальной коррекции / В.В. Дворкин // Гироскопия и навигация. - 2011 - №5. - С. 62-78.
16. «Заключительный технический отчет. Передача радиочастотных сигналов через плазму во время гиперзвукового полета». 2009 http://www.dtic.mil/dtic/tr/fulltext/u2/a518365.pdf.
17. Ричард Ван Дер Прит, Рон Винсент «Моделирование приема сигналов автоматического зависимого наблюдения в режиме широковещательной передачи на околоземной орбите» A Simulation of the Reception of Automatic Dependent Surveillance-Broadcast Signals in Low Earth Orbit / Richard Van Der Pryt, Ron Vincent; www.hindawi.com/joumals/ijno/2015/567604/.
18. Авиационная радионавигация. Справочник. Под редакции Сосновского А.А. - М.: Транспорт, 1990, 264.
19. Белгородский С.Л. Автоматизация управления посадкой самолета. - М.: Транспорт, 1972, 352.
20. Рогожин В.О., Синеглазов В.М., Фiлшешкiн М.К. Пiлотажно-навiгацiйни комплекси повiтряних суден. - К.: Книжкове видавництво НАУ, 2005, 316 (на украинском языке).
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированная автоматизированная система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов | 2017 |
|
RU2668145C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЦЕЛОСТНОСТИ ВОЗДУШНЫХ СУДОВ НА ВСЕХ УЧАСТКАХ ПОЛЕТА | 2013 |
|
RU2542746C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2003 |
|
RU2234739C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
Изобретение относится к радиотехническим средствам авиационной, космической техники, системам диспетчеризации и управления движением в атмосфере Земли и может использоваться в спускаемых космических объектах или их аппаратах, системах посадки, системах управления движением в атмосфере Земли. В состав бортовой аппаратуры изобретения введен модуль автоматического зависимого наблюдения (АЗН) со средствами приема дополнительных данных дифференциальной коррекции спутниковой навигационной системы между последовательно соединенными бортовым радиомаяком с антенной и бортовым блоком навигации. В состав наземной аппаратуры изобретения в состав наземных приемников системы автоматического зависимого наблюдения введены средства временной синхронизации для их реализации в составе многопозиционной системы наблюдения. Техническим результатом является повышение точности определения координат спускаемого космического объекта или его аппарата в атмосфере Земли при различных условиях полета. 2 ил.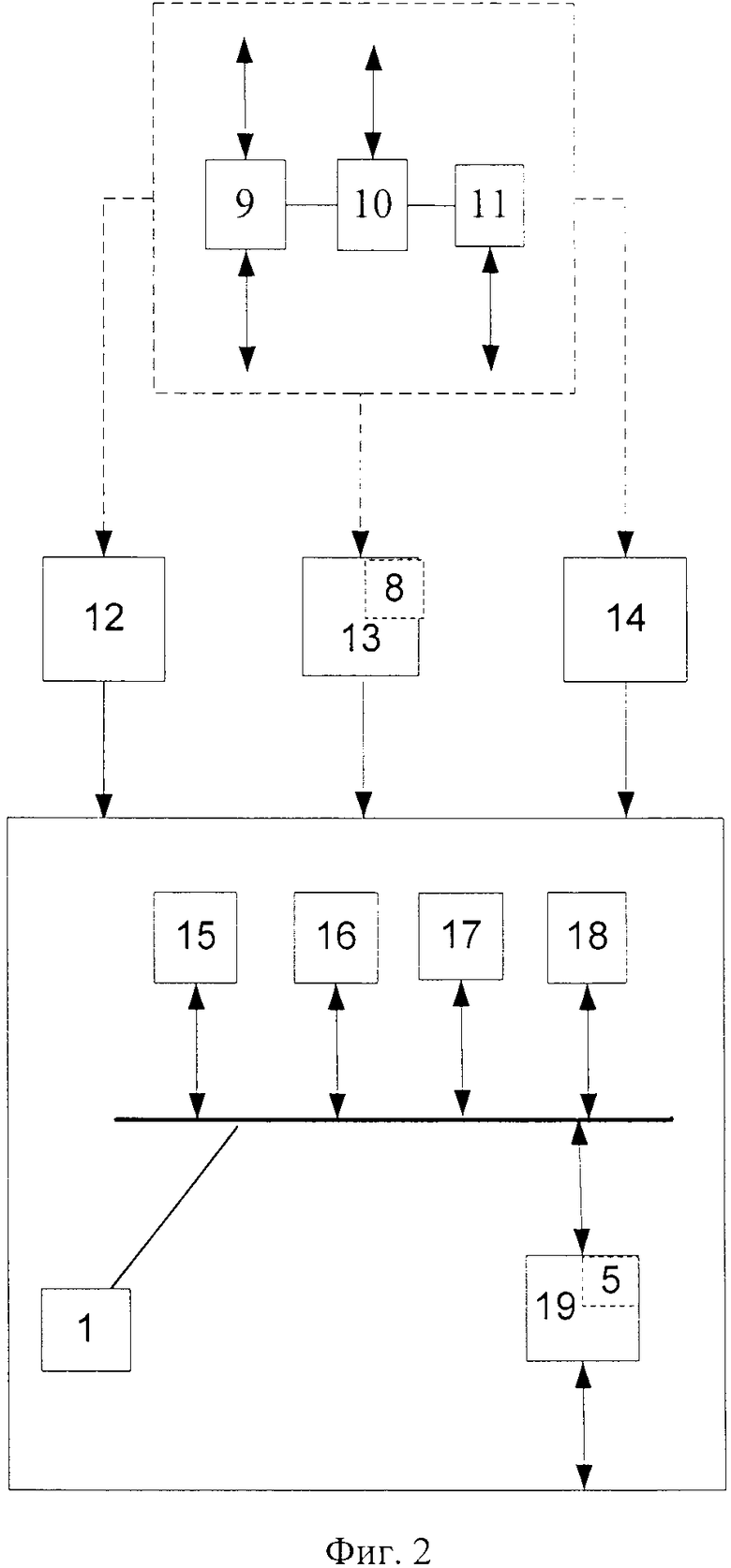
Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля, содержащая в составе бортовой аппаратуры - бортовой радиомаяк с антенной, бортовой блок навигации, в составе наземной аппаратуры - связанные между собой наземные радиолокационные станции, пеленгаторы радиомаяков, приемники автоматического зависимого наблюдения (АЗН) и система сбора, обработки и отображения информации, состоящая из локальной вычислительной сети, устройства сопряжения с внешними источниками информации, автоматизированных рабочих мест на базе ПЭВМ, комплекса средств обмена данными с потребителями с телефонными, телеграфными каналами обмена информации и волоконно-оптическими линиями связи, базы данных, специального программно-математического обеспечения, отличающаяся тем, что введен бортовой модуль АЗН со средствами приема дополнительных данных дифференциальной коррекции спутниковой навигационной системы между последовательно соединенным бортовым радиомаяком с антенной и бортовым блоком навигации и введены средства временной синхронизации в наземные приемники системы автоматического зависимого наблюдения для их реализации в составе многопозиционной системы наблюдения.
| RU 150701 U1, 20.02.2015 | |||
| 0 |
|
SU100836A1 | |
| Токарный резец | 1924 |
|
SU2016A1 |
| US 6711478 B2, 23.03.2004. | |||

