Изобретение относится к телевизионно-вычислительной технике и может быть использовано для автоматического обнаружения и регистрации параметров движущихся объектов, например транспортных средств в системах управления движением, в системах контроля за движением карьерного транспорта и т.д.
Одним из известных устройств, обеспечивающих селекцию и регистрацию движущихся объектов, является устройство для контроля движущегося объекта, содержащее узел ввода изображения, блок памяти выходных изображений, систему построения графика расстояний, блок памяти расстояний, блок памяти контрольных изображений, приемный блок, блок памяти изображений объекта, дальномер, детектор сигнала опасности, блок измерения размеров объекта, сигнализатор и блок управления [1].
В этом устройстве производится сравнение текущего и опорного изображений, выделение (или исключение) изображения движущегося объекта в приемном блоке и его запоминание в блоке памяти, а также измерение размеров объектов и дальности в блоке измерения.
При контроле в процессе движения необходимо производить учет как движущихся, так и остановившихся в зоне анализа объектов. Отсутствие такой возможности является недостатком данного устройства.
Известно телевизионное устройство, обеспечивающее селекцию движущихся объектов, которое содержит телевизионную камеру, синхронизатор, пороговый блок, элементы И, ИЛИ, блок памяти, три D-триггера [2].
Недостатком устройства является низкая точность обнаружения объектов, отсутствие возможности измерения величины перемещения и геометрических параметров объектов.
Наиболее близким техническим решением для данного объекта является устройство для обнаружения движущихся объектов, в состав которого входят телевизионный датчик, блок памяти, пороговый блок, элемент ИЛИ, измерительный блок, блок формирования зоны анализа, блок определения величины перемещения объекта и делитель частоты [3].
Недостаток устройства состоит в отсутствии возможности при контроле в процессе движения производить учет как движущихся, так и остановившихся в зоне анализа объектов.
Цель изобретения - расширение функциональных возможностей путем выделения и регистрации параметров как движущихся, так и остановившихся в зоне анализа объектов.
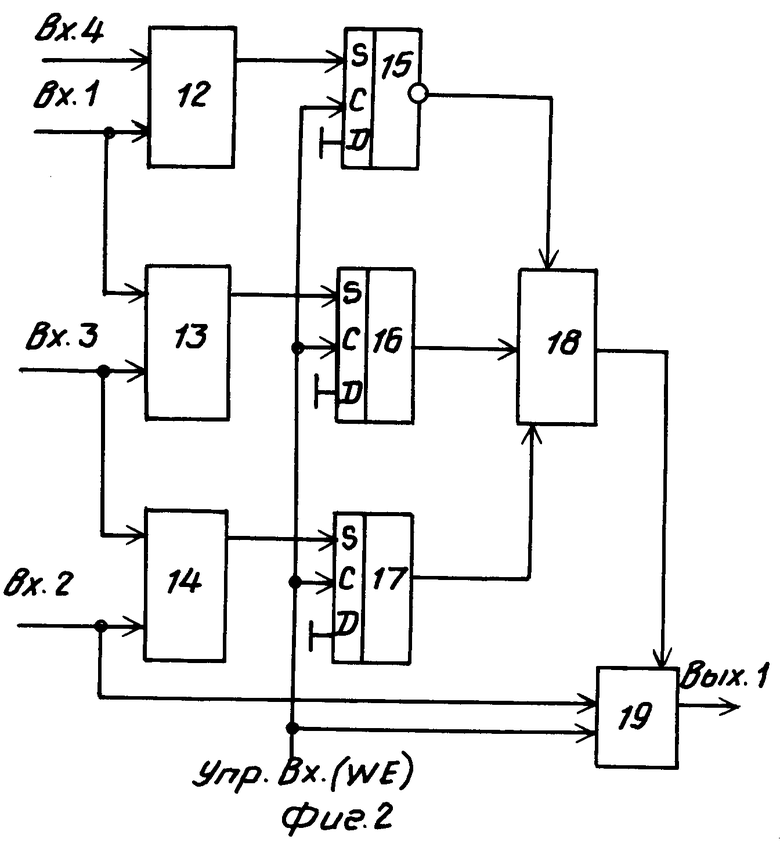
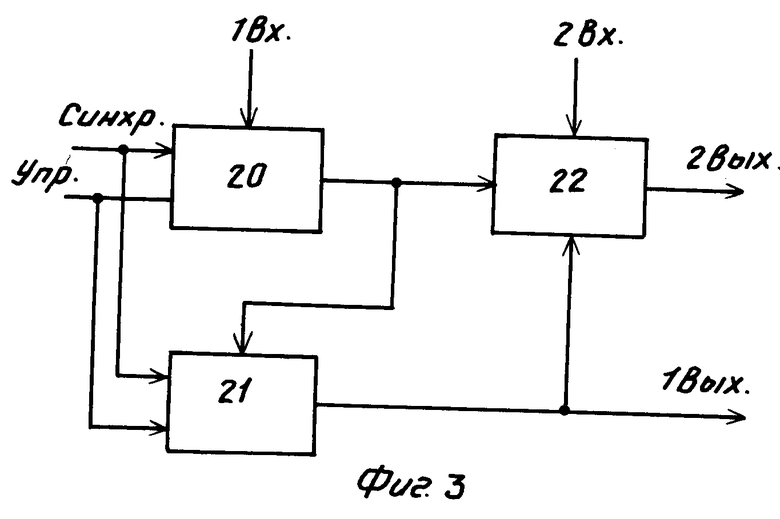
На фиг. 1 представлена структурная электрическая схема устройства для обнаружения движущихся объектов; на фиг.2 и 3 - варианты выполнения детектора остановки объекта и блока определения величины перемещения объекта.
Устройство для обнаружения движущихся объектов содержит телевизионный (ТВ) датчик 1, детектор 2 остановки объекта, блок формирования 3 зоны анализа, делитель 4 частоты, блок памяти 5, элемент ИЛИ 6, блок определения величины перемещения 7 объекта, измерительный блок 8, вычитатель 9, цифровой компаратор 10 и пороговый блок 11. В состав детектора 2 остановки объекта входят элементы И 12, 13 и 14, триггеры 15, 16 и 17 и элементы И 18 и 19, а в состав блока определения величины перемещения 7 объекта - запоминающие блоки 20 и 21 текущего и опорного значений сигнала и блок сравнения 22.
Устройство для обнаружения движущихся объектов работает следующим образом.
В блоке памяти 5 формируются цифровые сигналы текущего и опорного изображений, поступающие на вычитатель 9, а сигнал записи формируется делителем 4 частоты и поступает на детектор 2, блок памяти 5 и блок определения величины перемещения 7 объекта. Опорное изображение является изображением, задержанным на n кадров по отношению к текущему. Сигнал записи представляет собой результат деления на n импульсов кадровой части кадровых синхроимпульсов (КСИ). Под действием этого сигнала в течение n кадров разрешается чтение информации, а в течение одного кадра - режим чтение - модификация - запись, во время которого с выбранной ячейки памяти информация, записанная в предыдущем цикле обращения, считывается, а на ее место заносится текущая информация.
Текущая информация (телевизионный сигнал) с выхода ТВ датчика 1 заносится в блок памяти 5, из которого текущее и опорное изображения считываются по сигналу записи.
В вычитателе 9 производится вычитание опорного изображения из текущего и сигнал межкадровой разности (МКР) поступает на цифровой компаратор 10, где сравнивается с заданным кодом порога, поступающим с порогового блока 11 и преобразуется в бинарный сигнал МКР (сигнал объекта). Код порога может быть задан например, с помощью переключателей.
С выхода цифрового компаратора 10 сигнал объекта поступает через элемент ИЛИ 6 на блок определения величины перемещения 7. На второй вход элемента ИЛИ 6 поступает сигнал с детектора 2, который является бинарным сигналом объекта, остановившегося в контролируемой зоне.
В блоке определения величины перемещений 7 объекта по сигналу записи с делителя 4 текущий сигнал объекта заносится в запоминающий блок 20, а сигнал объекта, полученный в предыдущем цикле сравнения, переносится в запоминающий блок 21. Сигналы, считываемые с запоминающих блоков 20 и 21, сравниваются в блоке сравнения 22, в котором производится также логическое умножение на сигнал зоны анализа, поступающий с блока формирования зоны анализа 3.
Полученный разностный сигнал пропорционален величине перемещения объекта за цикл сравнения. Этот сигнал с выхода блока сравнения 3 поступает на измерительный блок 8, в котором указанная величина фиксируется. На другие входы измерительного блока 8 поступают соответственно сигнал объекта с выхода запоминающего блока 21 и сигнал зоны анализа с блока формирования 3.
Для учета объекта, остановившегося в контролируемой зоне, служит детектор 2 остановки объекта, сущность работы которого состоит в следующем.
Отсутствие (шаг 1 алгоритма) бинарного сигнала МКР в очередном цикле сравнения свидетельствует о том, что движения или не было ранее вообще, или объект остановился в контролируемой зоне, или вышел из нее.
Отсутствие (шаг 2 алгоритма) совпадения опорного сигнала объекта и первой зоны анализа свидетельствует о том, что в предыдущем цикле сравнения объект не обнаруживался и, следовательно, движения не было.
Наличие указанного совпадения свидетельствует о том, что объект либо остановился в первой зоне анализа, либо вышел из нее. Наличие бинарного сигнала МКР во второй зоне анализа свидетельствует о выходе объекта из первой зоны анализа, а отсутствие бинарного сигнала МКР во второй зона анализа свидетельствует об остановке объекта в первой зоне анализа (шаг 3 алгоритма).
При выявлении факта остановки объекта в первой зоне анализа на первый выход детектора 2 передается сигнал объекта от запоминающего блока 21 опорного значения сигнала объекта блока определения величины перемещения 7, а на втором выходе формируется признак остановки объекта. С выхода детектора 2 сигнал объекта поступает через элемент ИЛИ 6 на вход блока определения величины перемещения 7 для запоминания в конце цикла сравнения. Таким образом, в детекторе 2 производится проверка трех условий: есть ли сигнал МКР в первой зоне анализа, был ли сигнал МКР в первой зоне анализа в предыдущем цикле сравнения, есть ли сигнал МКР во второй зоне анализа. На основании проверки принимается решение о разрешении прохождения на выход детектора 2 от блока определения величины перемещения 7 объекта.
Перед началом цикла сравнения триггеры 15-17 детектора 2 устанавливаются в исходное состояние. Во время каждого кадра цикла сравнения происходит анализ трех условий элементами И 12-14 и запись результата анализа (лог."0" или лог."1") в триггеры 15-17.
Факт наличия объекта в первой зоне анализа в текущем цикле сравнения записывается в триггер 16 (первое условие алгоритма).
Факт присутствия объекта в первой зоне анализа в предыдущем цикле сравнения (второе условие алгоритма) записывается в триггер 17. Факт отсутствия объекта во второй зоне анализа в текущем цикле сравнения (третье условие алгоритма) записывается в триггер 15.
При выполнении всех указанных выше условий во время действия сигнала записи (режим чтение-модификация-запись) через элемент И 18 разрешается прохождение сигнала опорного объекта от блока определения величины перемещения 7.
Сигнал с выхода детектора 2 поступает через элемент ИЛИ 6 на вход блока определения величины перемещения 7 и запоминается в запоминающем блоке 20 текущего значения сигнала.
Таким образом осуществляется учет объекта, остановившегося в контролируемой зоне.
Если в некотором цикле сравнения произошла остановка двигавшегося ранее объекта, то в конце данного цикла сравнения изображение будет записано в блоке памяти 5.
Имевший место бинарный сигнал МКР (сигнал объекта) в данном цикле сравнения будет записан в запоминающий блок 20 текущего значения сигнала, а предыдущий бинарный сигнал МКР из запоминающего блока 20 текущего значения сигнала будет перемещен в запоминающий блок 21 опорного значения сигнала. Одновременно текущее изображение остановившегося объекта будет записано в блок памяти 5.
В конце следующего цикла сравнения (первый цикл сравнения) изображение неподвижного объекта переносится в блок памяти 5. Имевший место бинарный сигнал МКР (сигнал объекта) в данном цикле сравнения записывается в запоминающий блок 20 текущего значения сигнала, а предыдущий бинарный сигнал МКР из запоминающего блока 20 переносится в запоминающий блок 21. Текущее изображение неподвижного объекта заносится в блок памяти 5.
Во втором цикле сравнения при чтении из блока 5 бинарный сигнал МКР не обнаруживается, однако при выполнении рассмотренных выше условий (остановка объекта в контролируемой зоне) детектор 2 передает сигнал объекта с запоминающего блока 21 через элемент ИЛИ 6 на вход запоминающего блока 20. В результате информация об остановившемся в первой зоне анализа объекте сохраняется в запоминающих блоках 20 и 21.
При восстановлении движения в первой зоне анализа появляется бинарный сигнал МКР, что приводит к отключению детектора 2 (запрещению передачи сигнала объекта через элемент И 18). В этом случае бинарный сигнал МКР снова начинает поступать на вход запоминающего блока 20 от блока памяти 5 через элемент ИЛИ 6.
Таким образом, предложенное устройство позволяет выделить и регистрировать параметры как движущихся, так и остановившихся в зоне анализа объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1992 |
|
RU2041500C1 |
| УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 1992 |
|
RU2068582C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1992 |
|
RU2073958C1 |
| СИСТЕМА ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006942C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006941C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1992 |
|
RU2040120C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА И СРАВНЕНИЯ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 1993 |
|
RU2096922C1 |
| УСТРОЙСТВО ВВОДА-ВЫВОДА ИЗОБРАЖЕНИЯ | 1991 |
|
RU2019060C1 |
| ТЕЛЕВИЗИОННЫЙ АНАЛИЗАТОР НА МАТРИЦЕ ПРИБОРОВ С ЗАРЯДОВОЙ СВЯЗЬЮ | 1993 |
|
RU2040862C1 |
| УСТРОЙСТВО ВОСПРОИЗВЕДЕНИЯ ИЗОБРАЖЕНИЙ ИНТЕРФЕРОГРАММ | 1992 |
|
RU2030841C1 |
Использование: в телевизионно-вычислительной технике для автоматического обнаружения и регистрации параметров движущихся объектов. Сущность изобретения: устройство для обнаружения движущихся объектов содержит телевизионный датчик 1, детекторы 2 остановки объекта, блок формирования 3 зоны аназиза, делитель 4 частоты, блок памяти 5, элемент ИЛИ 6, блок определения величины перемещения 7 объекта, измерительный блок 8, вычитатель 9, цифровой компаратор 10, пороговый блок 11. Цель изобретения - расширение функциональных возможностей путем выделения и регистрации параметров как движущихся, так и остановившихся в зоне анализа объектов. 2 з.п. ф-лы, 3 ил.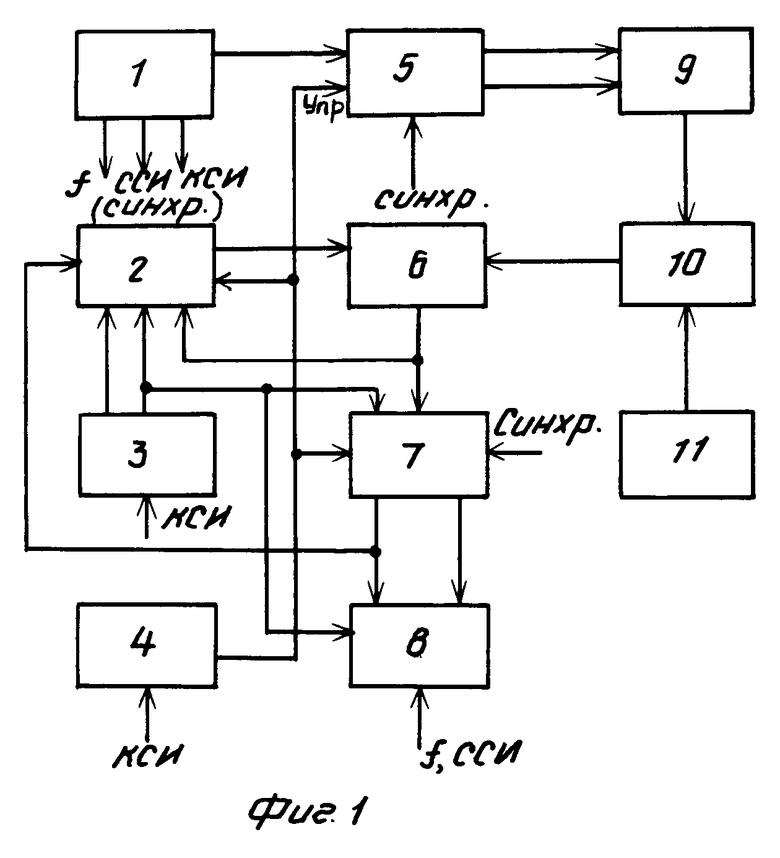
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для обнаружения движущихся объектов | 1989 |
|
SU1697275A2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
