Изобретение относится к телевизионно-вычислительной технике и может быть использовано для автоматического обнаружения и регистрации параметров движущихся объектов, например транспортных средств в системах управления движением, на транспортных предприятиях, в системах контроля за движением карьерного транспорта и т.д.
Сущность работы рассматриваемого устройства заключается в том, что в нем производится сравнение текущего и опорного изображений, записываемых в блоки ОЗУ, выделение (или исключение) изображения движущегося объекта в приемном блоке и его запоминание в блоке изображений объекта, а также измерение размеров объектов и дальности в блоке измерения.
В качестве опорного изображения может быть использовано либо задержанное на несколько кадров текущее изображение, либо введенное в некоторый момент времени эталонное изображение неподвижной сцены.
В первом случае получаемая межкадровая разность (МКР) от текущего и задержанного изображений не точно соответствует движущемуся объекту, так как из-за смещения во времени происходит "раздвоение" изображения объекта, выделяемого в разностном сигнале.
Во втором случае сигнал МКР от текущего и эталонного изображений точно соответствует движущемуся объекту, однако, при изменении сюжета (например, изменение освещенности сцены) выделяются неподвижные участки изображения, отличающиеся от эталонного.
В первом случае медленные изменения сюжета компенсируются за счет постоянного автоматического обновления опорного изображения. Во втором случае неменяющееся эталонное изображение не позволяет отследить эти изменения. Устройство не позволяет также обнаружить остановку объекта в контролируемой зоне.
Таким образом недостатком устройства является его низкая точность.
Задачей предлагаемого изобретения является повышение точности за счет введения режимов автоматического обновления эталонного изображения и обнаружения остановки объекта.
Для этого в устройство, содержащее блок формирования сигнала МКР и блок измерения, введены блок сравнения с эталоном, блок управления вводом эталона и детектор остановки объекта.
Структурная схема устройства изображена на фиг. 1.
Устройство содержит блок 1 формирования сигнала МКР, блок 2 сравнения изображения с эталоном, блок 3 управления вводом эталона, блок 4 измерения, детектор 5 остановки объекта.
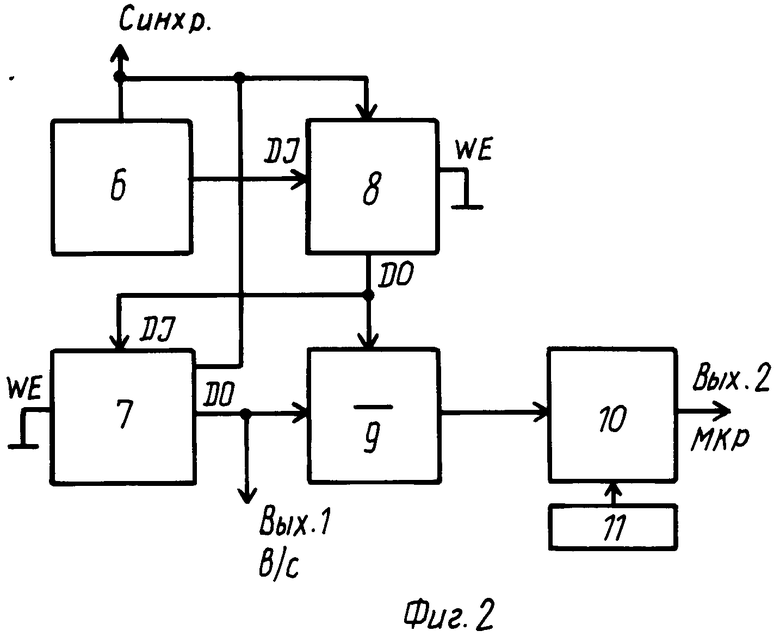
На фиг. 2 приведена структурная схема блока 1 формирования сигнала МКР.
Блок 1 содержит ТВ-датчик 6 с аналого-цифровым преобразователем (АЦП), запоминающее устройство (ЗУ) 7 для опорного изображения, ЗУ 8 для текущего изображения, блок 9 вычитания, компаратор 10, задатчик порога 11. Выход ЗУ 7 является первым выходом блока 1, а выход компаратора 10 вторым выходом блока 1. Синхровыход ТВ-датчика 6 является синхровыходом блока 1.
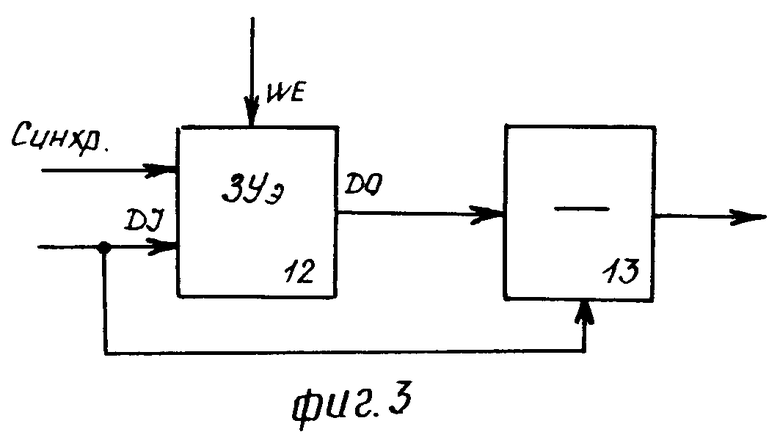
На фиг. 3 приведена структурная схема блока 2 сравнения с эталоном.
Блок 2 содержит ЗУ 12 для эталонного изображения и блок 13 вычитания. Первые входы ЗУ 12 и блока 13 являются первым входом блока 2. Управляющий вход ЗУ является вторым входом блока 2. Синхровход ЗУ является синхровходом блока 2.
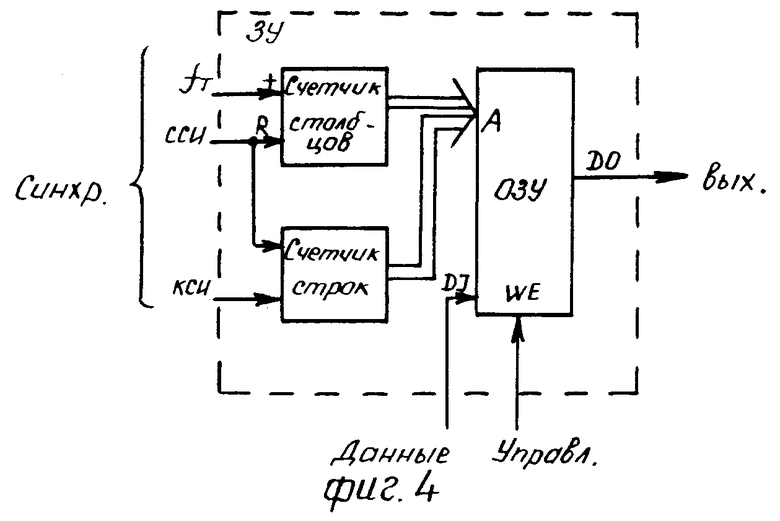
На фиг. 4 приведена структурная схема ЗУ в блоках 1 и 2.
ЗУ содержит счетчики строк и столбцов, выходы которых подключены к адресным входам ОЗУ. Установочные и счетные входы счетчиков являются синхровходом блока ЗУ.
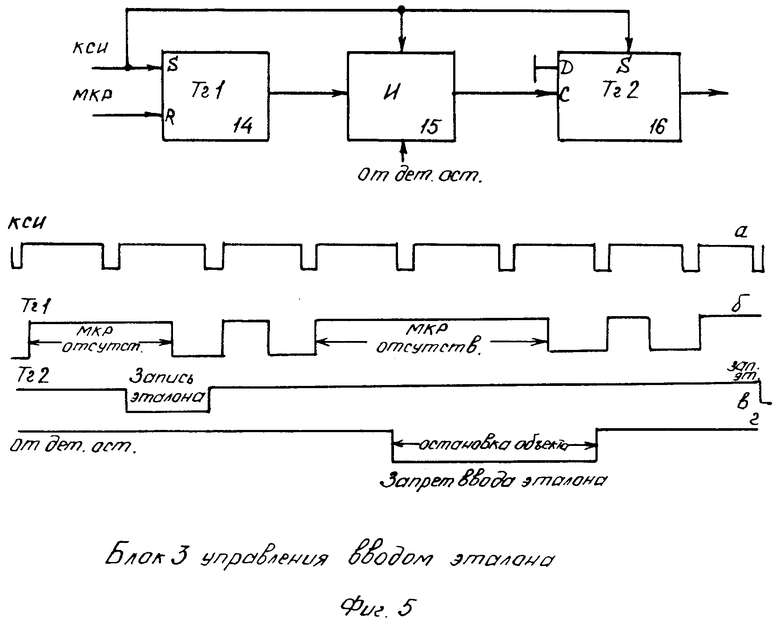
На фиг. 5 приведена структурная схема блока 3 управления, вводом эталона. Блок 3 содержит последовательно соединенные первый 14 триггер, элемент 15 И, второй 16 триггер. Вторые входы триггеров и элемента И соединены между собой и являются синхровходом блока 3.
Первый установочный вход триггера 14 является вторым входом блока 3. Третий вход элемента 15 И является третьим входом блока 3.
Сущность работы устройства заключается в следующем.
Сигнал движущегося объекта формируется в результате вычитания эталонного изображения неподвижной сцены из текущего изображения. При отсутствии движения эталонное изображение обновляется. При наличии движения эталонное изображение остается неизменным, а разностный сигнал между текущим и эталонным изображениями соответствует изображению движущегося объекта. В случае остановки объекта, ранее двигавшегося в контролируемой зоне, обновление эталонного изображения запрещается. В результате этого остановившийся в контролируемой зоне объект продолжает выделяться и регистрироваться.
Рассмотрим работу устройства более подробно.
Сигнал изображения в цифровой форме поступает от датчика 6 и записывается в ЗУ 8.
ЗУ 8 и 7 работают в режиме чтение-модификация-запись, при котором с каждой выбранной ячейки памяти предыдущая информация считывается, а на ее место заносится текущая информация. Таким образом, считываемая информация задержана относительно текущей на время одного кадра. Адресные сигналы в ЗУ 7, 8 и 12 вырабатываются в виде матрицы (адрес строки, адрес столбца) с помощью счетчиков, производящих счет импульсов синхронизации вдоль строки и вдоль кадра. Режим считывание-модификация-запись для микросхем различных серий задается по-разному (например, для серии 565РУ5 формированием специальных сигналов RAS, CAS, WE с соответствующими временными соотношениями, для 132РУ6 формированием сигналов CS, WE с иными временными соотношениями), поэтому на схеме фиг. 2 на вход управления режимом запись-чтение ЗУ 7 и 8 подан лог. "0", условно обозначающий наличие установленного режима чтение-модификация-запись для обоих ЗУ.
Сигнал текущего изображения, считываемый с ЗУ 8, поступает на первый вход блока 9 вычитания и на вход ЗУ 7. ЗУ 7 производит задержку текущего изображения на время одного кадра. Считываемый с ЗУ 7 сигнал используется в качестве опорного изображения и поступает на второй вход блока 9. Полученный в блоке 9 сигнал сравнивается компаратором 10 с заданным кодом порога в задатчике 11. Код порога может быть задан, например, с помощью переключателей. Бинарный сигнал с выхода компаратора 10 поступает на выход блока 1, соединенный с блоком 3.
Сигнал опорного изображения с выхода ЗУ 7 поступает также на второй выход блока 1, соединенный с блоком 2.
Бинарный сигнал МКР используется в блоке 3 для выработки сигнала управления вводом эталонного изображения. Блок 3 вырабатывает сигнал управления при отсутствии сигнала МКР, т.е. при отсутствии изменений в сюжете.
На фиг. 5 изображена структурная схема блока 3 и временные диаграммы его работы. В исходное состояние триггеры 14 и 16 устанавливаются кадровыми синхроимпульсами (диагр. а). При отсутствии сигнала МКР триггер 14 (диагр. б на фиг. 5) разрешает прохождение через элемент 15 кадровых синхроимпульсов. При отсутствии запрещающего сигнал от детектора 5 остановки производятся переключения триггера 16 по заднему фронту кадровых синхроимпульсов. В исходное состояние триггер 16 возвращается по переднему фронту кадровых синхроимпульсов (диагр. в на фиг. 5). При появлении сигнала МКР триггер 14 запрещает прохождение синхроимпульсов через элемент И 15 и переключение триггера 16. Сигнал с выхода триггера 16 поступает на выход блока 3 и на вход блока 2 для управления режимом работы ЗУ эталонного изображения 12.
В результате при отсутствии быстрых изменений в сюжете, обнаруживаемых блоком 1, ЗУ 12 переводится в режим считывание-модификация-запись и эталонное изображение, хранящееся в нем, обновляется. При появлении изменений (обнаружении движущегося объекта) обновление эталонного изображения прекращается, так как ЗУ 12 переводится в режим чтения.
Формирование сигнала движущегося объекта производится в блоке 2 с помощью вычитателя 13. Вычитатель 13 производит вычитание из сигнала изображения, поступающего на его первый вход от блока 1, эталонного изображения, хранящегося в ЗУ 12.
Кроме этого, вычитатель 13 производит сравнение полученной разности с кодом порога, т.е. формирование бинарного сигнала.
Таким образом, работа вычитателя 13 аналогична работе схем 9, 10 и 11 в блоке 1 (фиг. 2).
Полученный бинарный сигнал с выхода вычитателя 13 поступает на выход блока 2 и на вход блока 4 измерения. Блок измерения может быть построен различным образом в зависимости от назначения устройства. В простейшем случае это может быть, например, счетчик, осуществляющий подсчет площади выделяемого объекта.
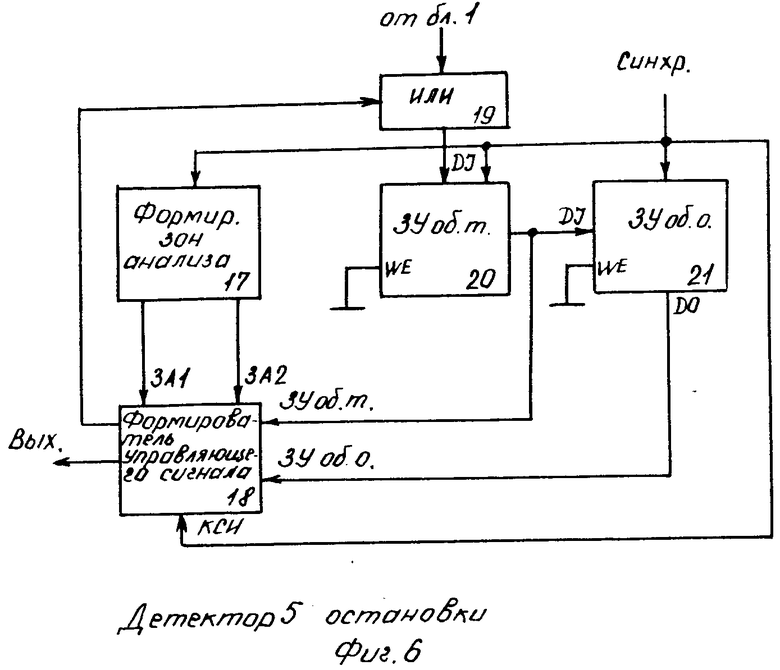
Рассмотрим работу детектора 5 остановки. Структурная схема детектора 5 остановки приведена на фиг. 6. Детектор содержит формирователь 17 зон анализа, формирователь 18 управляющего сигнала, ЗУ 20 для запоминания текущего бинарного изображения МКР, ЗУ 21 для запоминания опорного бинарного изображения МКР, элемент 19 ИЛИ. Опорное бинарное изображение МКР формируется за счет задержки на длительность кадра текущего изображения, считывается с ЗУ 20.
Структурные схемы и работа блоков ЗУ 20 и 21 аналогичны рассмотренным выше ЗУ для текущего и опорного изображений. Различие состоит лишь в том, что ЗУ 20 и 21 предназначены для запоминания бинарного сигнала, а ЗУ 18 и 9 для запоминания многоградационного сигнала.
Бинарный сигнал на вход ЗУ 20 поступает через элемент 19 ИЛИ, второй вход которого соединен со вторым выходом формирователя 18 управляющего сигнала.
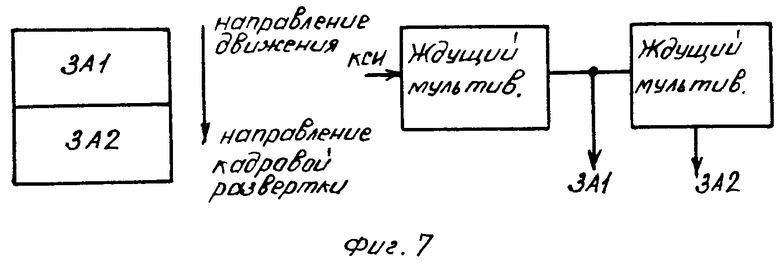
Формирователь 17 зон анализа формирует две зоны анализа ЗА1 и ЗА2. Пример расположения ЗА1 и ЗА2 приведен на фиг. 7. Для формирования таких зон могут быть использованы два ждущих мультивибратора, первый из которых запускается кадровым синхроимпульсом, а второй задним фронтом импульса, формируемого первым мультивибратором.
Сигналы синхронизации, сигналы зон анализа ЗА1 и ЗА2, а также текущий и опорный бинарные сигналы МКР поступают на формирователь управляющего сигнала 18, первый выход которого является выходом детектора 5.
Сущность работы формирователя 18 заключается в том, что он, обнаружив пропадание текущего бинарного изображения МКР, соответствующее неподвижной сцене, анализирует наличие опорного бинарного изображения МКР, полученного в предыдущем цикле сравнения, с учетом пространственных положений этих изображений.
На первом выходе формирователя 18, являющемся выходом детектора 5, в случае обнаружения остановки объекта в контролируемой зоне ЗА1 формируется сигнал (диаг. 2 на фиг. 5), поступающий на третий вход элемента И 15 блока 3 и запрещающий переключение триггера 16 в блоке 3. Запрет переключения триггера 16 при обнаружении остановки объекта не позволяет обновлять эталонное изображение в блоке 2. В результате изображение неподвижного объекта выделяется при вычитании текущего и эталонного изображений. При возобновлении движения на втором выходе блока 1 вновь появляется бинарное изображение МКР, детектор 5 снимает сигнал, запрещающий работу блока 3 (диагр. б, г на фиг. 5). При отсутствии объекта в поле зрения (неподвижная сцена без объекта контроля) происходит пропадание бинарного изображения МКР, выявляемое блоком 3 (диагр. в на фиг. 6). В этом случае блок 3 вырабатывает сигнал управления вводом эталонного изображения для блока 2.
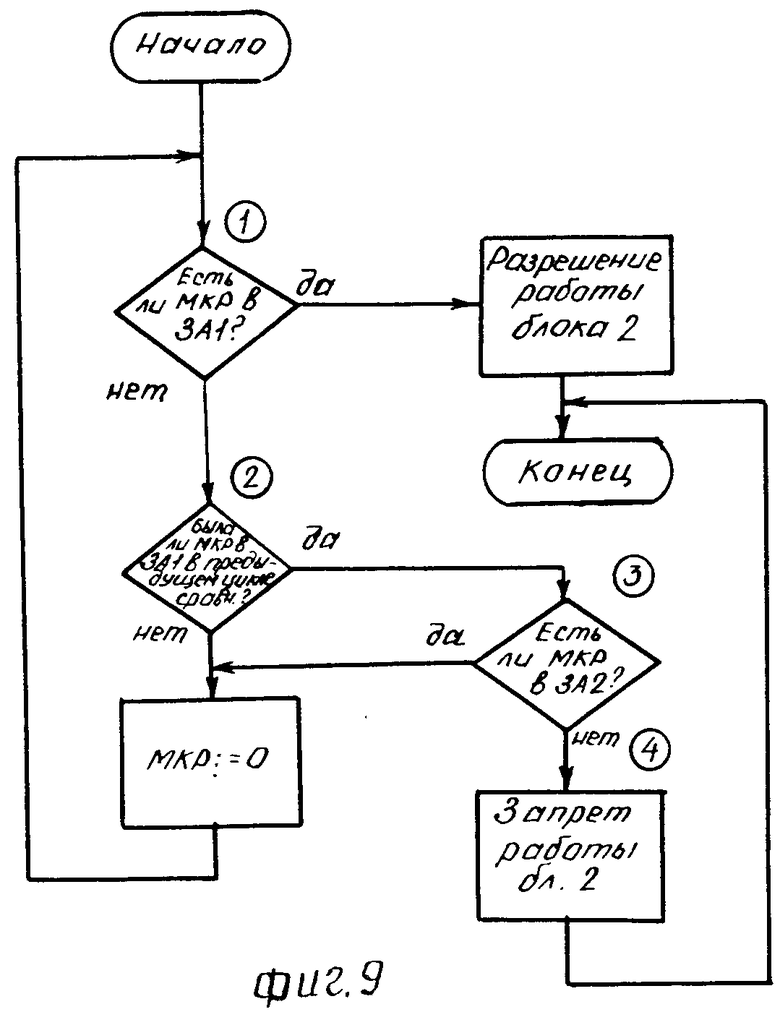
Работа формирователя 18 поясняется алгоритмом (фиг. 9). Отсутствие (шаг 1 алгоритма) текущего бинарного сигнала МКР в очередном цикле сравнения свидетельствует о том, что движения или не было ранее вообще, или объект остановился в контролируемой зоне, или вышел из нее.
Отсутствие (шаг 2 алгоритма) совпадения опорного сигнала МКР и зоны анализа ЗА1 свидетельствует о том, что в предыдущем цикле сравнения объект не обнаруживался и, следовательно, движения не было.
Наличие указанного совпадения свидетельствует о том, что объект либо остановился в ЗА1, либо вышел из нее. Наличие текущего бинарного сигнала МКР в зоне анализа ЗА2 свидетельствует о выходе объекта из ЗА1,а отсутствие текущего бинарного сигнала МКР в ЗА2 свидетельствует об остановке объекта в ЗА1 (шаг 3 алгоритма).
Таким образом, формирователь 18 управляющего сигнала производит проверку трех условий: есть ли МКР в ЗА1, была ли МКР в ЗА1 в предыдущем цикле сравнения, есть ли МКР в ЗА2.
При выявлении факта остановки объекта в ЗА1 на второй выход формирователя 18 передается сигнал от опорного ЗУ 20 объекта, а на первом выходе формируется признак остановки объекта.
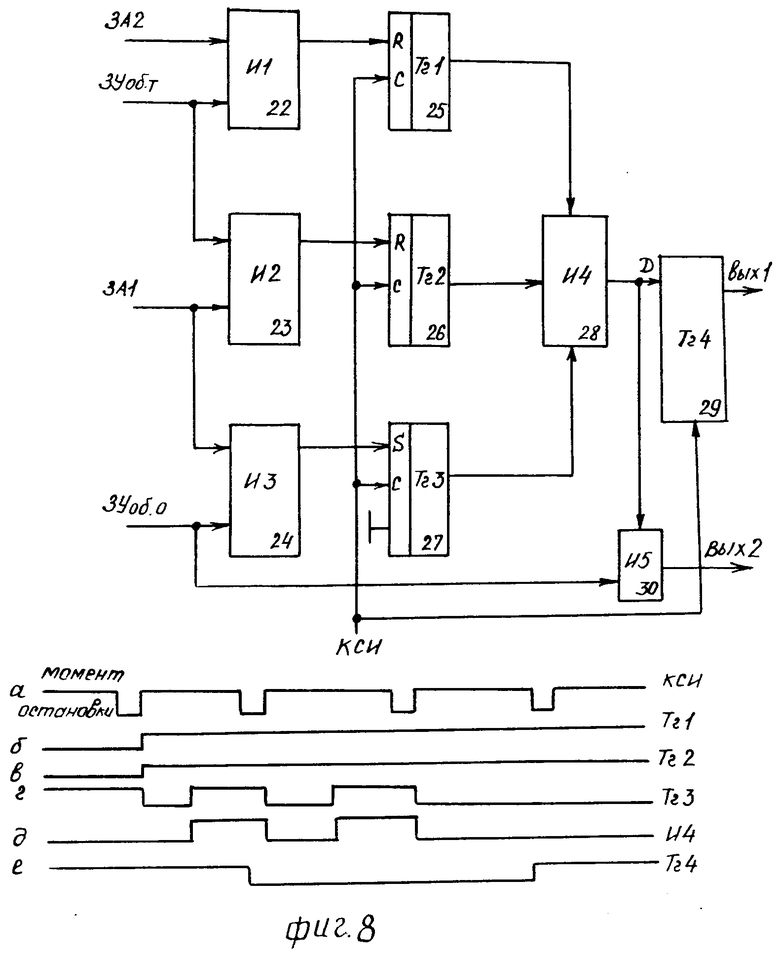
Структурная схема формирователя 18 управляющего сигнала и временные диаграммы его работы приведены на фиг. 8. Формирователь работает следующим образом.
По заднему фронту кадровых синхроимпульсов триггеры 25, 26, 27, 29 устанавливаются в исходное состояние. Во время каждого кадра происходит анализ условий 1, 2, 3 (фиг. 9 алгоритм работы детектора остановки) элементами И 22 24 и запись результата анализа (лог. "0" или лог. "1") в триггеры 25-27.
Факт наличия МКР в ЗА1 в текущем цикле сравнения (условие 1 алгоритма) записывается в триггер 26.
Факт присутствия МКР в ЗА1 в предыдущем цикле сравнения (условие 2 алгоритма) записывается в триггер 27.
Факт отсутствия МКР в ЗА2 в текущем цикле сравнения (условие 3 алгоритма) записывается в триггер 25.
При выполнении всех указанных выше условий сигнал с выхода элемента 28 И разрешает прохождение через элемент 30 И опорного сигнала МКР на второй выход формирователя 18.
Этот сигнал проходит через элемент ИЛИ 19 детектора 5 и запоминается в ЗУ 20.
Таким образом, осуществляется учет объекта, остановившегося в контролируемой зоне.
Сигнал с выхода элемента 28 И по переднему фронту КСИ заносится в триггер 29. Таким образом, на выходе триггера 29, являющимся выходом детектора 5, формируется сигнал (диагр. 2 на фиг. 5), запрещающий обновление эталона в блоке 2.
На фиг. 8 приведены временные диаграммы, поясняющие взаимодействие элементов в формирователе 18. При отсутствии текущего сигнала объекта в ЗА1 и ЗА2 триггеры 25 и 26 устанавливаются в единицу по заднему фронту КСИ (диагр. а,б,в на фиг. 8). При наличии опорного сигнала объекта в ЗА1, триггер 27 переключается в единицу и сбрасывается в нуль по заднему фронту КСИ (диагр. г на фиг. 8). На выходе элемента И 28 формируется сигнал (диагр. д на фиг. 8), разрешающий прохождение опорного сигнала объекта через элемент И 30. Выходной сигнал детектора, управляющий работой блока 2, формируется триггером 29 (диагр. е на фиг. 8).
Таким образом, предлагаемое устройство позволяет выделять и регистрировать параметры как движущихся, так и остановившихся в зоне анализа объектов.
Изобретение относится к вычислительной технике. Его использование для автоматического обнаружения и регистрации параметров движущихся объектов позволяет повысить точность обнаружения. Устройство содержит блок 1 формирования сигнала межкадровой разности, блок 2 сравнения изображения с эталоном и блок 4 измерения. Благодаря введению блока 3 управления вводом эталона и детектора 5 остановки объекта, имеющих специфические выполнения, в устройстве обеспечивается режим автоматического обновления эталонного изображения и обнаружения остановки объекта. 2 з.п. ф-лы, 9 ил.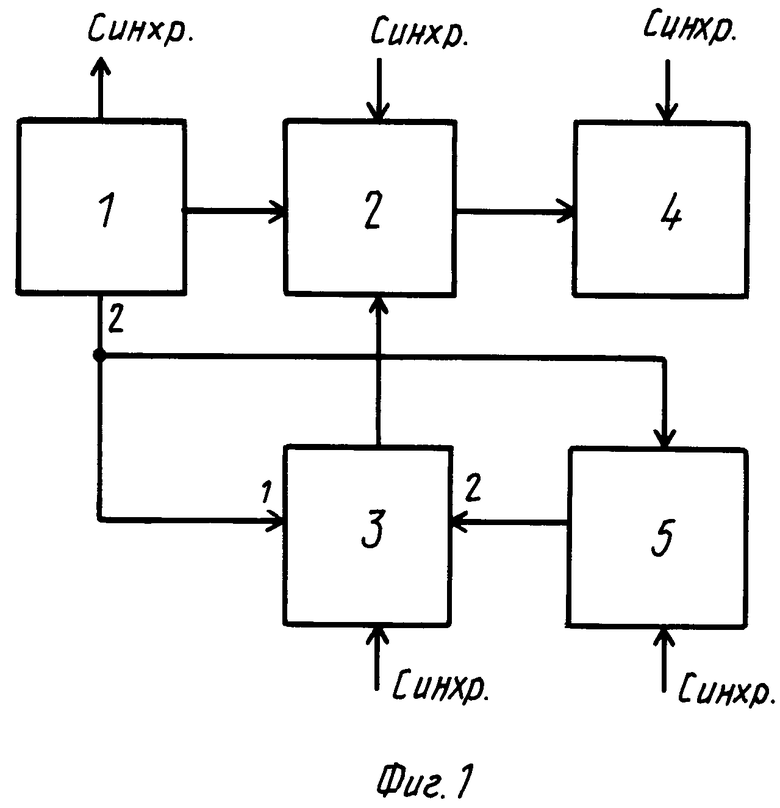
| Патент ФРГ N 3841387, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
