Изобретение относится к измерительной и вычислительной технике и предназначено для использования в робототехнических системах и комплексах, а также другого технологического оборудования для двухкоординатных измерения и контроля параметров кинематического движения объекта.
Известен ультразвуковой преобразователь перемещений, содержащий прямолинейный звукопровод с магнитострикционными свойствами со свободным концом, акустический демпфер, стабилизатор растягивающих усилий, элемент записи и элемент считывания с подмагничиванием, усилитель записи, предусилитель считывания, одновибратор, измерительный генератор, триггер, блок автоматического регулирования усиления, усилитель-формирователь, коммутатор, регистр, блок табличного вычисления, три буферных регистра, цифровой компаратор [1]
Известен ультразвуковой преобразователь перемещений, выбранный в качестве прототипа, который содержит две координатные пьезоэлектрические пластины, одна из которых выполнена неподвижной, шесть встречно-штыревых преобразователей ПАВ, генератор, два фазовращателя, два измерителя разности фаз, четыре акустических поглотителя и два акустических волновода [2]
Основным недостатком известных устройств является недостаточная точность измерения линейных перемещений из-за влияния дестабилизирующих факторов среды, например дисперсии скорости упругой волны в волноводе. Устройства сложны в изготовлении, что снижает их себестоимость.
Целью изобретения является повышение точности двухкоординатного измерения линейных перемещений из-за уменьшения влияния дестабилизирующих факторов среды.
Поставленная цель достигается тем, что в ультразвуковой преобразователь перемещений, содержащий основание, звукопровод, закрепленный на основании, акустический поглотитель, установленный на звукопроводе, первый и второй сосредоточенные элементы считывания, установленные на звукопроводе рядом с акустическим поглотителем, первый и второй избирательные усилители-формирователи считывания, подключенные к выводам первого и второго сосредоточенных элементов считывания соответственно, и последовательно соединенные формирователь импульсов и усилитель записи, введены первый и второй поляризующие магниты, координатные элементы с визирным элементом, первый и второй D-триггеры, триггер контроля ошибки, первые и вторые измерительные генераторы и счетчики результата, два инвертора, выход первого инвертора соединен с единичным входом триггера контроля ошибки, а вход с выходом формирователя импульсов, нулевыми входами первого и второго счетчиков результата и через второй инвертор подключен к шине синхронизации, нулевые входы D-триггеров, триггера контроля ошибки соединены с одним входом формирователя импульсов и подключены к шине управления, другой вход формирователя импульсов подключен к шине запуска. Синхровходы первого и второго D-триггеров подсоединены соответственно к выходам первого и второго избирательных усилителей-формирователей считывания. Выход первого D-триггера соединен с одним входом первого элемента ИЛИ и входом первого измерительного генератора, выход второго D-триггера с другим входом первого элемента ИЛИ и входом второго измерительного генератора. Выходы первого и второго измерительных генераторов соединены соответственно с прямыми счетными входами первого и второго счетчиков результата, их разрядные выходы подключены к первым и вторым шинам результата. Выходы переноса соединены с входами второго элемента ИЛИ, его выход соединен с синхровходом триггера контроля ошибки, выход которого подключен к шине контроля ошибки, выход первого элемента ИЛИ подключен к шине запроса, а звукопровод выполнен Г-образным, на ветвях которого расположены указанные магниты с возможностью перемещения вдоль этих ветвей.
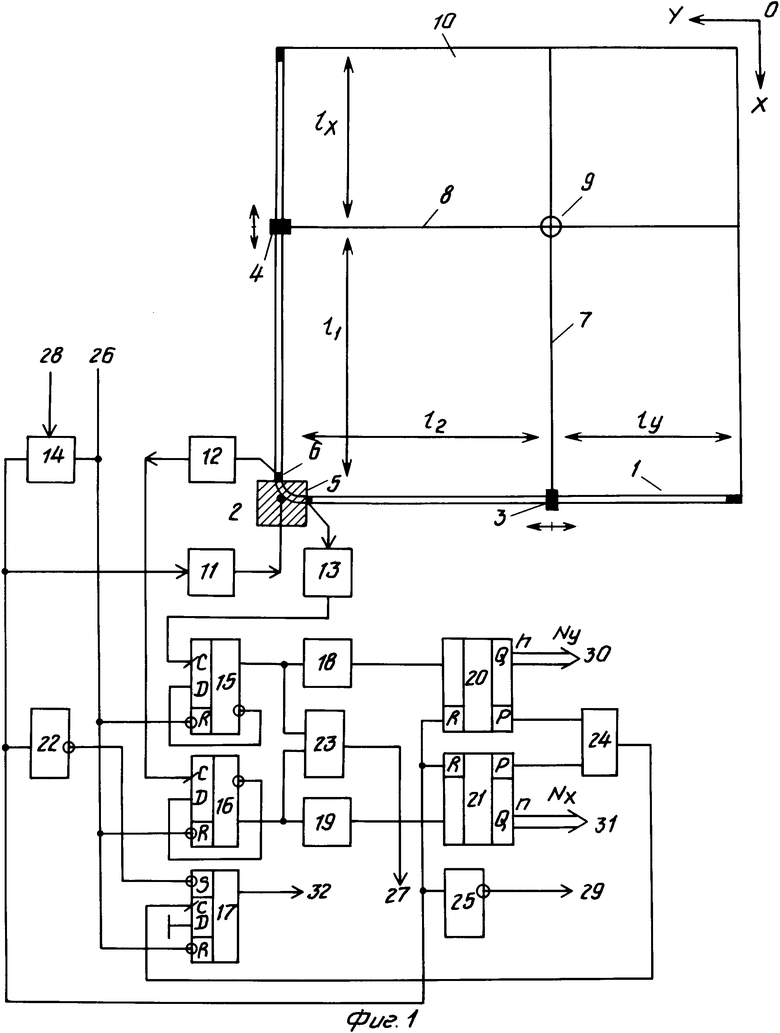
На фиг. 1 приведена блок-схема ультразвукового преобразователя перемещений; на фиг. 2 временные диаграммы, поясняющие его работу.
Ультразвуковой преобразователь перемещений (фиг. 1) содержит двухкоординатный первичный магнитострикционный преобразователь перемещений (МПП), выполненный на основе Г-образного звукопровода 1 из магнитострикционного материала, акустического поглотителя 2, двух поляризующих магнитов 3, 4, сосредоточенных элементов 5, 6 считывания, координатных поводковых элементов 7, 8 с визирным элементом 9, установленных на основании 10, усилителя 11 записи и двух координатных избирательных усилителей-формирователей 12, 13 считывания, а также формирователь 14 импульсов, первый и второй D-триггеры 15, 16, триггер 17 контроля ошибки, первый и второй измерительные генераторы 18, 19, первый и второй счетчики 20, 21 результаты, первый инвертор 22, первый и второй элементы 23, ИЛИ 24, второй инвертор 25, шину 26 управления, шину 27 запроса, шину 28 запуска, шину 29 синхронизации, две координатные шины 30, 31 и шину 32 контроля ошибки.
Акустический поглотитель 2 установлен в зоне изгиба Г-образного магнитострикционного звукопровода 1 МПП, образуя две акустически изолированные ортогональные ветви. На каждой из них вблизи акустического поглотителя 2 неподвижно закреплены первый и второй сосредоточенные элементы 5, 6 считывания, подсоединенные через первый и второй избирательные усилители-формирователи 12, 13 считывания к синхровходам первого и второго D-триггеров 15, 16 соответственно. Здесь же закреплены поляризующие магниты 3, 4, выполненные с возможностью перемещения вдоль ветвей со свободными концами и имеющие кинематическое соединение с объектом через визирный элемент 9 и координатные поводковые элементы 7, 8.
Звукопровод 1 МПП через акустический поглотитель 2 подсоединен к выходу усилителя 11 записи, его вход соединен с входами первого и второго инвертора 22, 25, нулевыми входами первого и второго счетчиков 20, 21 результата и выходом формирователя 14 импульсов. Один вход формирователя 14 импульсов соединен с нулевыми входами первого и второго D-триггеров 15, 16 и триггера 17 контроля ошибки и подключен к шине 26 управления. Другой его вход подключен к шине 28 запуска.
Выход первого инвертора 22 соединен с единичным входом триггера 17 контроля ошибки. Его вход синхронизации соединен с выходом второго элемента ИЛИ 24. Выход второго инвертора 25 подключен к шине 29 синхронизации. Выход первого D-триггера 15 соединен с одним входом первого элемента ИЛИ 23 и через первый измерительный генератор 18 подключен к прямому счетному входу первого счетчика 20 результата. Его информационные выходы подключены к первым шинам 30 результата, а выход переноса соединен с одним входом второго элемента 24 ИЛИ. Выход второго D-триггера 16 соединен с другим входом первого элемента ИЛИ 23 и через второй измерительный генератор 19 подключен к прямому счетному входу второго счетчика 21 результата. Его информационные выходы подключены к вторым шинам 31 результата, а выход переноса к второму входу второго элемента ИЛИ 24. Выход первого элемента ИЛИ 23 подключен к шине 27 запроса, выход триггера 17 контроля ошибки к шине 32 контроля ошибки.
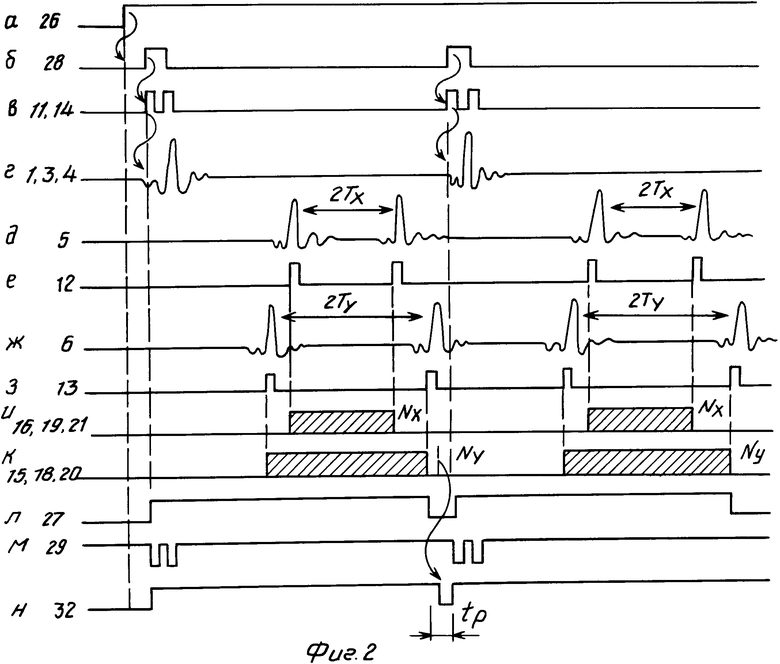
Ультразвуковой преобразователь перемещений работает следующим образом. В исходном состоянии преобразователь (фиг. 1) находится в заблокированном состоянии (фиг. 2 а) и не реагирует на сигналы "Запуск" (фиг. 2 б) по шине 28 запуска. При подаче сигнала "Разрешение" по шине 26 производится разблокирование входов формирователя 14 импульсов, первого и второго D-триггеров 15, 16. Преобразователь подготовлен к циклу преобразования, о чем сигналом "Запрос" (фиг. 2 л) по шине 27 запроса информируется пользователь.
В следующий момент времени tр (время реакции) по шине 28 подается сигнал "Запуск", который запустит формирователь 14 импульсов. На его выходе будут сформированы сдвоенные видеоимпульсы (фиг. 2 в), которые управляют работой усилителя 11 записи и возбуждают в среде Г-образного магнитострикционного звукопровода 1 МПП под поляризующими магнитами 3, 4 крутильные упругие волны удвоенной амплитуды (фиг. 2 г).
Эти упругие волны начинают распространяться в обе стороны по ортогональным ветвям звукопровода 1 со скоростью Vкр крутильной волны. Одни волны, распространяясь в сторону акустического поглотителя 2, достигают сосредоточенные элементы 5, 6 считывания и ими считываются через интервалы времени соответственно
T1= l1/Vкр и T2=l2/Vкр, (1) где l1, l2 расстояние между элементами 5, 6 считывания и координатными поляризующими магнитами 3, 4.
Далее падающие упругие волны демпфируются акустическим поглотителем 2 МПП. Другие волны достигают границ отражения ортогональных ветвей звукопровода 1 МПП, отражаются без изменения фазы и формы волны, изменяют направление своего движения и через интервалы времени
T3= (l1+2lx)/Vкр и T4=(l2+2ly)/Vкр, (2) где lx, ly искомые перемещения объекта по координатным осям Х и Y, достигают сосредоточенные элементы 5, 6 считывания и считываются. В следующий момент отраженные упругие волны демпфируются акустическим поглотителем 2 МПП преобразователя.
Сформированные сигналы считывания на выводах элементов 5, 6 считывания усиливаются и преобразуются в прямоугольные видеоимпульсы координатными избирательными усилителями-формирователями 12, 13 считывания (фиг. 2 д-з). По этим сигналам производится цикл переключения D-триггеров 15, 16, формируя на их выходах временные интервалы искомых перемещений по координатным осям X и Y (фиг. 2 и, к)
Tx=T3-T1=2lx/Vкр и Ty=T4-T2=2ly/Vкр (3)
На время их действия запускаются координатные измерительные генераторы 18, 19, производящие дискретизацию интервалов перемещений (3) с частотой f0= 1/T0. Так, счетные импульсы генераторов 18, 19 поступают на счетные входы первого и второго счетчиков 20, 21 результаты и накапливаются, формируя на их разрядных выходах коды линейного перемещения lx, ly по координатным осям Х и Y.
Nx= Tx˙f0 и Ny=Ty ˙f0, (4) которые в следующий момент времени выставляются по первым и вторым шинам 30, 31 результата.
В случае переполнения разрядной сетки счетчиков 20 или 21 на их выходах переполнения формируются сигналы, которые проходят через второй логический элемент ИЛИ 24 и переключают в нулевое состояние триггер 17 контроля ошибки. По шине 32 контроля ошибки выставляется сигнал "Ошибка" (фиг. 2 н), информирующий пользователя о недостоверности считанной или принимаемой информации о координатном перемещении объекта.
По сигналам D-триггеров 15, 16 первым логическим элементом ИЛИ 23 формируется сигнал "Запрос" (фиг. 2 л), выставляемый по шине 27 запроса. Сигнал "Синхронизация" (фиг. 2 м) вырабатывается по выходу второго инвертора 25 в начале каждого очередного цикла преобразования и подается по шине 29 синхронизации.
Одновременно производится установка в исходное состояние счетчиков 20, 21 и триггера 17 контроля ошибки. На этом цикл преобразования преобразователя завершается, и он подготовлен к очередному циклу, который начинается по сигналу "Запуск" и выполняется согласно рассмотренного. При снятии сигнала "Разрешение" преобразователь переводится в режим блокирования работы.
Таким образом, возбуждение в звукопроводе МПП преобразователя крутильных упругих волн удвоенной амплитуды, повышение избирательности цепей считывания повышает точность измерения перемещений и упрощает структуру преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| Ультразвуковой преобразователь перемещений | 1989 |
|
SU1765690A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2299401C2 |
| НАКЛОНОМЕР | 1991 |
|
RU2035693C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2100775C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2032179C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2035692C1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля перемещений. Цель изобретения повышение точности контроля координат объекта перемещения за счет использования Г-образного звукопровода. В последнем возбуждаются ультразвуковые крутильные колебания при взаимодействии с поляризующими магнитами, расположенными на ветвях звукопровода. Эти магниты связаны с перемещающимся объектом, и по положению их фиксируются координаты этого объекта. 2 ил.
УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ, содержащий основание, звукопровод, закрепленный на основании, акустический поглотитель, установленный на звукопроводе, первый и второй сосредоточенные элементы считывания, установленные на звукопроводе рядом с акустическим поглотителем, первый и второй избирательные усилители-формирователи считывания, подключенные к выводам первого и второго сосредоточенных элементов считывания соответственно, и последовательно соединенные формирователь импульсов и усилитель записи, отличающийся тем, что, с целью повышения точности, он снабжен первым и вторым поляризующими магнитами, координатными элементами с визирным элементом, первым и вторым D-триггерами, триггером контроля ошибки, первыми и вторыми измерительными генераторами и счетчиками результата, двумя инверторами, выход первого инвертора соединен с единичным входом триггера контроля ошибки, а вход с выходом формирователя импульсов, нулевыми входами первого и второго счетчиков результата и через второй инвертор подключен к шине синхронизации, нулевые входы D-триггеров и триггера контроля ошибки соединены с одним входом формирователя импульсов и подключены к шине управления, другой вход формирователя импульсов подключен к шине запуска, синхровходы первого и второго D-триггеров подсоединены соответственно к выходам первого и второго избирательных усилителе-формирователей считывания, выход первого D-триггера соединен с одним входом первого элемента ИЛИ и входом первого измерительного генератора, выход второго D-триггера с другим входом первого элемента ИЛИ и входом второго измерительного генератора, выходы первого и второго измерительных генераторов соединены соответственно с прямыми счетными входами первого и второго счетчиков результата, их разрядные выходы подключены к первым и вторым шинам результата, а выходы переноса соединены с входами второго элемента ИЛИ, выход которого соединен с синхровходом триггера контроля ошибки, выход которого подключен к шине контроля ошибки, выход первого элемента ИЛИ подключен к шине запроса, а звукопровод выполнен Г-образным, на его ветвях расположены указанные магниты с возможностью перемещения вдоль этих ветвей.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения перемещений | 1986 |
|
SU1368628A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
