Область техники
Изобретение относится к области электротехники и может быть использовано в цифровых автоматизированных электроприводах переменного тока с преобразователями частоты.
Уровень техники
Известно устройство для управления частотно-регулируемым электроприводом по патенту РФ №1836802.
Устройство содержит преобразователь частоты, составленный из последовательно соединенных блоков: регулируемого выпрямителя, фильтра, инвертора. Управляющий вход выпрямителя подключен к выходу блока управления выпрямителем, управляющий вход инвертора - к выходу блока управления инвертором, вход которого подключен к выходу задающего генератора частоты. Выходы датчиков напряжения и тока двигателя подключены к входам блока определения ЭДС двигателя, выход которого подключен к одному из входов блока сравнения, другой вход которого подключен к выходу блока ограничения ЭДС двигателя. Вход блока ограничения ЭДС подключен к выходу задатчика интенсивности, входом соединенного с выходом блока сравнения. Выход блока ограничения ЭДС соединен со входом блока управления выпрямителем и одним из входов датчика ошибки ЭДС двигателя, другой вход которого подключен к выходу блока определения ЭДС, а выход - к одному из входов суммирующего усилителя, другой вход которого подключен к выходу блока ограничения ЭДС. Фазы статорной обмотки двигателя подключены к выходам инвертора.
Техническое решение направлено на обеспечение поддержания постоянным соотношения между текущими значениями ЭДС и частоты поля статора (ЭДС) двигателя при перегрузках в статических и динамических режимах, т.е. когда начинает работать токоограничение, чтобы исключить «опрокидывание» двигателя.
Недостатком является то, что поддержание постоянства соотношения между текущими значениями ЭДС и частоты поля статора (ЭДС) двигателя обеспечивается только в режиме перегрузки при работе токоограничения, а не во всех режимах работы электропривода, что сужает его функциональные возможности.
Наиболее близкое техническое решение, взятое за прототип, изложено в патенте РФ №2331152.
Согласно патенту устройство для управления частотно-регулируемым электроприводом содержит преобразователь частоты, составленный из последовательно соединенных нерегулируемого выпрямителя, фильтра и инвертора, выход которого соединен через датчик напряжения со статором асинхронного двигателя. Для управления инвертором служит блок управления инвертором, выход которого соединен с управляющим входом инвертора. В состав устройства входят также задатчик интенсивности, определяющий заданное значение ЭДС двигателя, датчик ошибки ЭДС, определяющий ошибку регулирования ЭДС, а также блок сравнения, соединенный по выходу с задатчиком интенсивности, а по одному из своих входов - с датчиком ошибки ЭДС.
Кроме того, устройство содержит регулятор ЭДС двигателя с двумя входами, регулятор частоты поля статора двигателя с тремя входами, функциональный преобразователь с тремя входами.
Блок управления инвертором имеет два входа, первый из которых связан с выходом регулятора частоты поля статора, а второй - с выходом регулятора ЭДС двигателя. Выход задатчика интенсивности связан с одним из входов датчика ошибки ЭДС и точкой соединения вторых входов: регулятора частоты поля статора двигателя, регулятора ЭДС двигателя и функционального преобразователя. Выход датчика ошибки ЭДС соединен с третьим входом регулятора частоты поля статора двигателя, а второй вход датчика ошибки ЭДС соединен с первым входом регулятора ЭДС двигателя и выходом функционального преобразователя, третий вход которого соединен с датчиком напряжения двигателя.
Задатчик абсолютного скольжения ротора двигателя задает величину скольжения, определяющую момент двигателя в пускотормозных режимах его работы. Выход задатчика абсолютного скольжения соединен со вторым входом блока сравнения и с первыми входами регулятора частоты и функционального преобразователя.
Техническое решение направлено на обеспечение соответствия в любой момент времени текущего значения частоты поля статора двигателя текущему значению ЭДС двигателя во всех режимах его работы.
Оптимизация по быстродействию процессов разгона и торможения осуществляется воздействием на задатчик интенсивности сигнала блока сравнения в зависимости от соотношения сигналов датчика ошибки ЭДС и задатчика абсолютного скольжения.
Недостатком является то, что устройство осуществляет оптимизацию по быстродействию процессов разгона и торможения только в аналоговой системе управления электроприводом и не может быть использовано в цифровой системе управления.
Использование микропроцессорной техники при создании устройства для управления частотно-регулируемым электроприводом позволит не только существенно снизить габариты устройства, но и повысить гибкость управления электроприводом с точки зрения изменения алгоритмов его работы и технических характеристик путем соответствующего изменения программного обеспечения микроконтроллера управления. Однако в этом случае вопрос оптимизации по быстродействию процессов разгона и торможения электропривода необходимо решать иным способом по сравнению с аналоговым устройством по прототипу.
Поэтому целью предлагаемого изобретения является создание устройства для управления цифровым частотно-регулируемым электроприводом с уменьшенными габаритами и повышенной гибкостью управления электроприводом, оптимизирующего по быстродействию разгон и торможение электропривода без «опрокидывания» двигателя при разгоне и без перенапряжений на силовых элементах преобразователя частоты при торможении.
Раскрытие изобретения
Предлагаемое устройство для управления цифровым частотно-регулируемым электроприводом содержит преобразователь частоты, составленный из последовательно соединенных элементов: источника постоянного напряжения, фильтра и инвертора, выход которого через датчик напряжения соединен со статором асинхронного двигателя. Для управления инвертором служит блок управления инвертором, выходом соединенный с входом инвертора.
Для регулирования частоты поля статора двигателя служит регулятор частоты, выход которого соединен с первым входом блока управления. Для регулирования ЭДС двигателя служит регулятор ЭДС, выходом соединенный со вторым входом блока управления инвертором. Для задания скорости разгона и скорости торможения электропривода служит задатчик интенсивности, выходом соединенный с первым входом датчика ошибки ЭДС, первым входом регулятора частоты и первым входом регулятора ЭДС двигателя. Функциональный преобразователь служит для определения ЭДС двигателя по сигналам датчика напряжения и введенного в устройство дополнительно датчика тока, причем первый вход функционального преобразователя соединен с выходом датчика напряжения, а второй вход - с выходом датчика тока, а выход соединен со вторым входом регулятора ЭДС двигателя и вторым входом датчика ошибки ЭДС. Сущность изобретения заключается в том, что в устройство управления электроприводом (например, с асинхронным двигателем), регулируемым по частоте, которое содержит преобразователь частоты, блок управления инвертором, регуляторы ЭДС и частоты поля статора двигателя, датчик ошибки ЭДС, введены элементы, позволяющие обеспечить оптимизацию по быстродействию разгона и торможения двигателя.
Это датчик тока, функциональный преобразователь, определяющий по сигналам датчиков напряжения и тока сигнал обратной связи по ЭДС двигателя, блок квантования по времени сигнала обратной связи по ЭДС двигателя, решающий блок и блок коррекции времени разгона и времени торможения двигателя.
При этом функциональный преобразователь первым входом подключен к выходу датчика напряжения, вторым входом - к выходу датчика тока, а выходом - ко второму входу датчика ошибки ЭДС двигателя, ко второму входу регулятора ЭДС двигателя и ко входу блока квантования, выход которого соединен со входом решающего блока, выходом соединенного со входом блока коррекции времени разгона и времени торможения двигателя, выход которого соединен со входом задатчика интенсивности.
Благодаря тому что управление разгоном и торможением цифрового частотно-регулируемого электропривода осуществляется путем непрерывного квантования по времени сигнала обратной связи по ЭДС блоком квантования, непрерывного измерения мгновенных значений амплитуд квантованных импульсов, непрерывного определения знака текущего приращения амплитуд квантованных импульсов путем вычисления вторых разностей мгновенных значений амплитуд для каждых трех следующих друг за другом квантованных импульсов с помощью решающего блока и непрерывной коррекции времени разгона и времени торможения путем соответствующего воздействия на задатчик интенсивности в зависимости от знака вторых разностей мгновенных значений амплитуд квантованных импульсов, оптимизируется по быстродействию разгон электропривода без «опрокидывания» асинхронного двигателя и торможение электропривода без перенапряжений на силовых элементах инвертора.
Краткое описание графической фигуры
На фиг.1 представлена блок-схема устройства для управления цифровым частотно-регулируемым электроприводом. Цифрами обозначены:
1 - источник постоянного напряжения,
2 - фильтр,
3 - инвертор,
4 - датчик напряжения,
5 - датчик тока,
6 - асинхронный двигатель,
7 - блок управления инвертора,
8 - регулятор ЭДС двигателя,
9 - регулятор частоты двигателя,
10 - функциональный преобразователь,
11 - датчик ошибки ЭДС двигателя,
12 - задатчик интенсивности,
13 - блок квантования по времени сигнала обратной связи ЭДС двигателя,
14 - решающий блок,
15 - блок коррекции времени разгона и времени торможения двигателя.
Осуществление изобретения
Предлагаемое устройство для управления цифровым частотно-регулируемым электроприводом (фиг.1) содержит преобразователь частоты, составленный из последовательно соединенных элементов: источника постоянного напряжения 1, индуктивно-емкостного фильтра 2 и инвертора 3, выход которого подключен через датчики напряжения 4 и тока 5 к фазам статорной обмотки асинхронного двигателя 6. Блок управления 7 инвертором подключен по своему выходу к управляющему входу инвертора 3, а по своим двум входам - соответственно к выходу регулятора 8 ЭДС двигателя и к выходу регулятора 9 частоты поля статора двигателя. Задатчик 12 интенсивности выходом связан с первым входом регулятора 8 ЭДС двигателя, первым входом датчика 11 ошибки ЭДС двигателя и первым входом регулятора 9 частоты поля статора двигателя, второй вход регулятора частоты поля статора двигателя связан с выходом датчика 11 ошибки ЭДС двигателя. Функциональный преобразователь 10 входами связан с выходами датчика 4 напряжения и датчика 5 тока, а выходом - со входом блока 13 квантования, а также вторыми входами регулятора 8 ЭДС двигателя и датчика 11 ошибки ЭДС двигателя. Блок 13 квантования выходом соединен со входом решающего блока 14, выход которого соединен со входом блока 15 коррекции времени разгона и времени торможения, выходом связанного со входом задатчика 12 интенсивности.
В качестве конкретных элементов описанной блок-схемы могут быть выбраны следующие:
1 (источник постоянного напряжения - нерегулируемый выпрямитель) - трехфазный выпрямительный модуль типа М6Д-63-400, 63А, 400В;
2 (фильтр) - дроссель постоянного тока с индуктивностью 1 мГн, сердечником ШЛ 20×25, воздушным зазором 1,25 мм на ток 25А; электролитический конденсатор типа К50-77-250 В-4700 мкФ;
3 (инвертор) - трехфазный инверторный модуль SEMIX101GDO66HDS (ФРГ), 140А, 600В;
4 (датчик напряжения) - тип LV25-P/SP3;
5 (датчик тока) - тип LA55-P/SP21;
7 (блок управления) - драйвер SKHI71 (ФРГ);
10 (функциональный преобразователь) - операционный усилитель типа 140УД7ВК;
7, 8, 9, 13, 14, 15 - устройства могут быть выполнены на микроконтроллере типа ST10F276Z5T3 (США), серии ST10;
12 (задатчик интенсивности) - интегратор на усилителе типа 140УД7ВК;
6 (асинхронный двигатель) - асинхронный двигатель с короткозамкнутым ротором мощностью 2 кВт, 12000 об/мин.
Устройство работает следующим образом:
С выхода задатчика 12 интенсивности сигнал задания ЭДС двигателя  поступает на первый вход регулятора 8 ЭДС двигателя. Этот же сигнал в качестве задания частоты поля статора двигателя
поступает на первый вход регулятора 8 ЭДС двигателя. Этот же сигнал в качестве задания частоты поля статора двигателя  поступает на первый вход регулятора 9 частоты поля статора двигателя. На второй вход регулятора 8 ЭДС двигателя поступает сигнал текущего значения ЭДС двигателя e1 в качестве сигнала обратной связи по ЭДС с выхода функционального преобразователя 10. Регулятор 8 ЭДС двигателя является ИП-регулятором, т.е. имеет астатизм первого порядка. Он реализует функцию управления в виде:
поступает на первый вход регулятора 9 частоты поля статора двигателя. На второй вход регулятора 8 ЭДС двигателя поступает сигнал текущего значения ЭДС двигателя e1 в качестве сигнала обратной связи по ЭДС с выхода функционального преобразователя 10. Регулятор 8 ЭДС двигателя является ИП-регулятором, т.е. имеет астатизм первого порядка. Он реализует функцию управления в виде:

где Uу - сигнал управления величиной ЭДС двигателя, поступающий с выхода регулятора 8 ЭДС двигателя на второй вход блока 7 управления инвертором;
TE - постоянная времени интегральной составляющей сигнала Uу;
KE - коэффициент передачи пропорциональной составляющей сигнала Uу.
Очевидно, в регуляторе 8 с астатизмом первого порядка Δe1 в установившихся режимах работы электропривода является величиной высокого порядка малости по сравнению с и e1, и поэтому корректно соотношение  . Однако в динамических режимах электропривода величиной Δe1 пренебречь нельзя. Текущее значение ЭДС (e1) определяется функциональным преобразователем 10 из текущего значения напряжения U1 двигателя, поступающего с выхода датчика 4 напряжения на один из входов (1) преобразователя 10 и текущего значения тока I1 двигателя, поступающего с выхода датчика 5 тока на второй вход функционального преобразователя 10 путем векторного сложения сигнала датчика 4 напряжения с сигналом датчика 5 тока, соответствующего падению напряжения на активном сопротивлении обмотки статора.
. Однако в динамических режимах электропривода величиной Δe1 пренебречь нельзя. Текущее значение ЭДС (e1) определяется функциональным преобразователем 10 из текущего значения напряжения U1 двигателя, поступающего с выхода датчика 4 напряжения на один из входов (1) преобразователя 10 и текущего значения тока I1 двигателя, поступающего с выхода датчика 5 тока на второй вход функционального преобразователя 10 путем векторного сложения сигнала датчика 4 напряжения с сигналом датчика 5 тока, соответствующего падению напряжения на активном сопротивлении обмотки статора.
Регулятор 9 частоты поля статора двигателя из сигнала задатчика 12 интенсивности , поступающего с его выхода на первый вход регулятора 9 частоты поля статора двигателя, и из сигнала Δe1 с выхода датчика 11 ошибки ЭДС двигателя, поступающего на второй вход регулятора 9 частоты реализует функцию управления вида

где  - функция управления, реализуемая датчиком 11 ошибки ЭДС двигателя… (3).
- функция управления, реализуемая датчиком 11 ошибки ЭДС двигателя… (3).
С учетом выражения (3) получаем:

где Uα - сигнал управления частотой поля статора, поступающий с выхода регулятора 9 частоты на первый вход блока 7 управления инвертором.
Таким образом, сигнал управления Uα частотой поля статора определяет такую частоту α поля статора, которая в любой момент времени соответствует текущему значению ЭДС двигателя.
Если при разгоне двигателя 6 скорость его отстает от скорости увеличения выходного сигнала задатчика 12 интенсивности, определяющего частоту поля статора двигателя, начинает увеличиваться скольжение и ток двигателя и, когда вступает в работу токоограничение, начинает уменьшаться ЭДС двигателя e1 и сигнал обратной связи по ЭДС а следовательно, частота поля статора и скорость двигателя, вплоть до полной остановки («опрокидывание» двигателя).
Чтобы этого не произошло, блок квантования непрерывно квантует по времени сигнал обратной связи по ЭДС двигателя, поступающий с выхода функционального преобразователя 10 на вход блока 13 квантования, квантованные по времени импульсы непрерывно поступают с выхода блока квантования на вход решающего блока, в котором непрерывно измеряются текущие значения амплитуд квантованных импульсов и непрерывно определяется знак текущего приращения амплитуд квантованных импульсов путем вычисления вторых разностей мгновенных значений амплитуд для каждых трех следующих друг за другом квантованных импульсов по уравнению:

где Xn - n-й квантованный импульс,
Xn+1 - (n+1)-й квантованный импульс,
Xn+2 - (n+2)-й квантованный импульс, где
n=1, 2…~.
Сигнал Sign Δ2Xn с выхода решающего блока поступает на вход блока 15 коррекции, который либо останавливает задатчик интенсивности и разгон двигателя при Δ2Xn<0, т.е. при Sign отрицательном, до тех пор, пока не станет Δ2Xn≥0, т.е. Sign положительный. При этом выходной сигнал задатчика продолжит увеличиваться, и продолжится разгон двигателя.
Если при разгоне двигателя Δ2Xn≥0, т.е. Sign положительный, то задатчик интенсивности не останавливается, и разгон двигателя продолжается.
Если при торможении двигателя Δ2Xn≤0, т.е. Sign отрицательный, то торможение двигателя продолжается без перенапряжений на силовых элементах инвертора, т.е. когда величина отрицательного скольжения двигателя не увеличивается.
Если при торможении двигателя Δ2Xn>0, т.е. Sign положительный, то задатчик интенсивности останавливается, и торможение двигателя продолжается путем выбега до тех пор, пока не станет Δ2Xn≤0, т.е. Sign отрицательный и задатчик интенсивности продолжит изменение выходного сигнала в сторону дальнейшего уменьшения, т.е. двигатель продолжит активное торможение.
Устройство для управления цифровым частотно-регулируемым электроприводом позволит не только улучшить динамику электропривода без «опрокидывания» двигателя при его разгоне и без перенапряжений на силовых элементах преобразователя при его торможении, но существенно снизить габариты устройства и повысить гибкость управления электроприводом с точки зрения изменения алгоритмов его работы и технических характеристик путем соответствующего программного обеспечения микроконтроллера управления.
Согласно предлагаемому изобретению был разработан и испытан опытный образец электропривода мощностью 500 Вт, выходной частотой 50 Гц для перекачивающего водяного насоса.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2331152C1 |
| Устройство для управления многодвигательным электроприводом переменного тока | 1987 |
|
SU1422358A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1252906A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Частотно-регулируемый электропривод | 1978 |
|
SU744886A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU730939A1 |
| Преобразователь частоты для частотно-регулируемого электропривода | 1979 |
|
SU888321A1 |
Изобретение относится к области электротехники и может быть использовано в цифровых автоматизированных электроприводах переменного тока. Технический результат - оптимизация по быстродействию разгона электропривода без «опрокидывания» асинхронного двигателя и торможения электропривода без перенапряжений на силовых элементах инвертора. Устройство для управления цифровым частотно-регулируемым электроприводом содержит управляемый преобразователь частоты, задатчик интенсивности, датчики ошибки ЭДС двигателя, напряжения, регулятор ЭДС двигателя, регулятор частоты и введены датчик тока, функциональный преобразователь, блок квантования по времени сигнала обратной связи по ЭДС двигателя, решающий блок, определяющий знак текущего приращения сигнала обратной связи по ЭДС двигателя, блок коррекции времени разгона и времени торможения двигателя в зависимости от знака текущего приращения сигнала обратной связи по ЭДС двигателя. Управление разгоном и торможением цифрового частотно-регулируемого электропривода осуществляют квантованием по времени сигнала обратной связи по ЭДС двигателя, измерением мгновенных значений амплитуд квантованных импульсов, определением знака текущего приращения амплитуд квантованных импульсов путем вычисления вторых разностей мгновенных значений амплитуд для каждых трех следующих друг за другом квантованных импульсов и коррекции времени разгона, времени торможения в зависимости от знака вторых разностей мгновенных значений амплитуд квантованных импульсов. 1 ил. 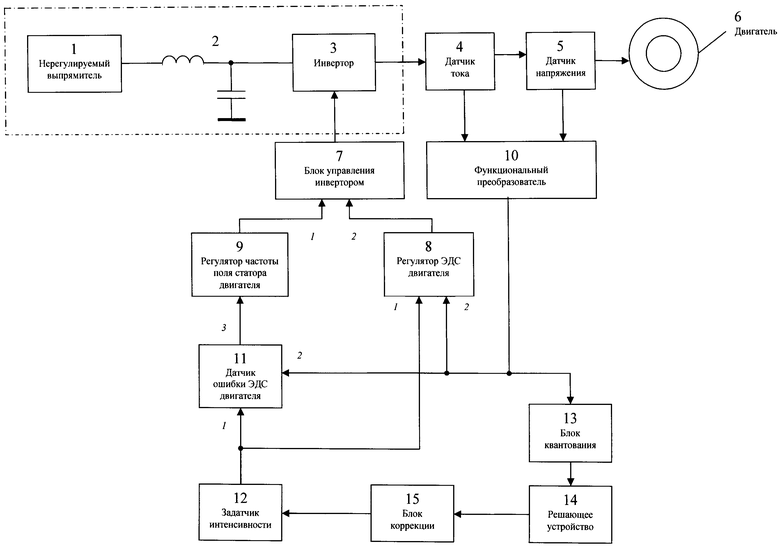
Устройство для управления цифровым частотно-регулируемым электроприводом, содержащее источник постоянного напряжения и инвертор, соединенные между собой через LC-фильтр, датчик напряжения, соединенный со статором асинхронного двигателя, задатчик интенсивности, функциональный преобразователь и блок управления инвертором, подключенный к инвертору, при этом два входа блока управления инвертором соединены, соответственно, с регулятором частоты поля статора и регулятором ЭДС двигателя, выход задатчика интенсивности подключен к регулятору ЭДС-напрямую, а к регулятору частоты поля статора - через один из входов датчика ошибки ЭДС двигателя, другой вход которого соединен со вторым входом регулятора ЭДС двигателя и одновременно - с выходом функционального преобразователя, у которого один из входов подключен к датчику напряжения, отличающийся тем, что устройство включает в себя элементы оптимизации быстродействия разгона и торможения двигателя: датчик тока, блок квантования, решающий блок и блок коррекции, при этом датчик тока включен последовательно между инвертором и датчиком напряжения, а его выход подключен к второму входу функционального преобразователя, при этом выход функционального преобразователя подключен дополнительно к блоку квантования, который последовательно соединен с решающим устройством и блоком коррекции, а выход последнего подключен к входу задатчика интенсивности.
| РЕЗОНАНСНЫЙ УРОВНЕМЕР | 0 |
|
SU231152A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1991 |
|
SU1836802A3 |
| Устройство для управления частотно-регулируемым электроприводом | 1985 |
|
SU1309245A1 |
| ОПЕРАТИВНЫЙ ДОСТУП ПРИ ЛЕЧЕНИИ ПЕРЕЛОМА БУГРИСТОСТИ БОЛЬШЕБЕРЦОВОЙ КОСТИ | 2005 |
|
RU2286734C1 |
| FR 2872647 B1, 08.12.2006 | |||
| JP 2012235567 A, 29.11.2012 | |||
| US 8405344 B2, 26.03.2012 | |||
| WO1987006403 A1, 22.10.1987 | |||

