Изобретение относится к железнодорожному транспорту и может быть использовано для определения неровностей на поверхности катания рельсов.
Известно устройство для определения неровностей на поверхности катания рельса, содержащее два датчика ускорений, прикрепленных к буксам одной пары вагона путеизмерителя, коммутатор аналоговых сигналов, датчик оборотов колеса, соединенный с цифровым скоростемером, к выходу которого подключен дешифратор кодов, и два блока двукратного интегрирования, выходы которых соединены со входами блока определения траектории движения колеса по головке рельса.
В известном устройстве частота дискретизации аналоговых сигналов ускорений является постоянной величиной и определяется допускаемой максимальной скоростью качения колеса по рельсу. При больших значениях допускаемых скоростей качения колеса по рельсу, частота дискретизации может достигать значительных величин, что приводит к избыточности информации в m раз при малых скоростях качения колеса по рельсу и, как следствие, к снижению производительности известного устройства в целом.
Для обеспечения условия инвариантности вычисленных значений вертикальных ускорений к скорости качения колеса по рельсу в известном устройстве применяются блоки двукратного интегрирования, имеющие различные передаточные характеристики, учитывающие cкорость качения колеса по рельсу. Количество блоков двукратного интегрирования 12-i, 13-i, имеющих индивидуальные передаточные характеристики, зависит от количества поддиапазонов разбиения диапазона допускаемых cкоростей качения колеса по рельсу m. При больших значениях m сложность известного устройства существенно возрастает.
Цель изобретения увеличение производительности при упрощении конструкции устройства.
Это достигается тем, что в устройство для определения неровностей на поверхности катания рельса, содержащее два датчика ускорений, прикрепленных к буксам одной пары вагона-путеизмерителя, коммутатор аналоговых сигналов, датчик оборотов колеса, соединенный с цифровым cкоростемером, к выходу которого подключен дешифратор кодов, и два блока двукратного интегрирования, выходы которых соединены со входами блока определения траектории движения колеса по головке рельса, дополнительно введены m ячеек памяти, коммутатор цифровых сигналов, последовательно соединенные двухвходовый элемент ИЛИ, счетчик и дополнительный дешифратор кодов, линии задержки и последовательно соединенные аналого-цифро- вой преобразователь, умножитель цифровых сигналов и мультиплексор цифровых сигналов, соединенный выходами со входами блоков двукратного интегрирования, а управляющим входом с выходом второго дешифратора кодов, дополнительно соединенным с управляющим входом коммутатора аналоговых сигналов, функциональные входы которого соединены через одну и другую линии задержки с одним и другим датчиками ускорений соответственно, а выход с функциональным входом аналого-цифрового преобразователя, управляющий вход которого через третью линию задержки соединен с выходом элемента ИЛИ, один и другой входы которого соединены соответственно непосредственно и через четвертую линию задержки с датчиком оборотов колеса. Каждый из информационных входов коммутатора цифровых сигналов соединен с соответствующей i-ой ячейкой памяти, управляющий вход с выходом первого дешифратора кодов, выход со вторым входом умножителя цифровых сигналов. Каждая ступень первого и второго блоков двукратного интегрирования включает в себя регистры сдвига, управляющие входы которых соответственно соединены через пятую и последовательно соединенные четвертую и шестую линии задержки с датчиком оборотов колеса, и подключенный к выходам регистров через дополнительные цифровые умножители сумматор.
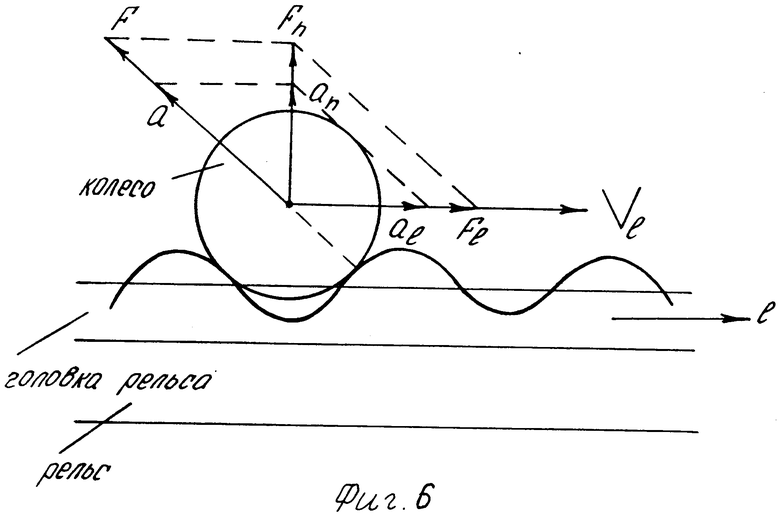
На фиг.1 представлена структурная схема устройства; на фиг.2 схема блока двукратного интегрирования; на фиг.3 схема блока определения траектории движения колеса по одному рельсу; на фиг.4 и 5 схемы реализации коммутатора аналоговых сигналов, мультиплексора цифровых сигналов и коммутатора цифровых сигналов; на фиг.6 годограф распределения сил F, скорости V и ускорений а, действующих на колесо при движении по головке рельса.
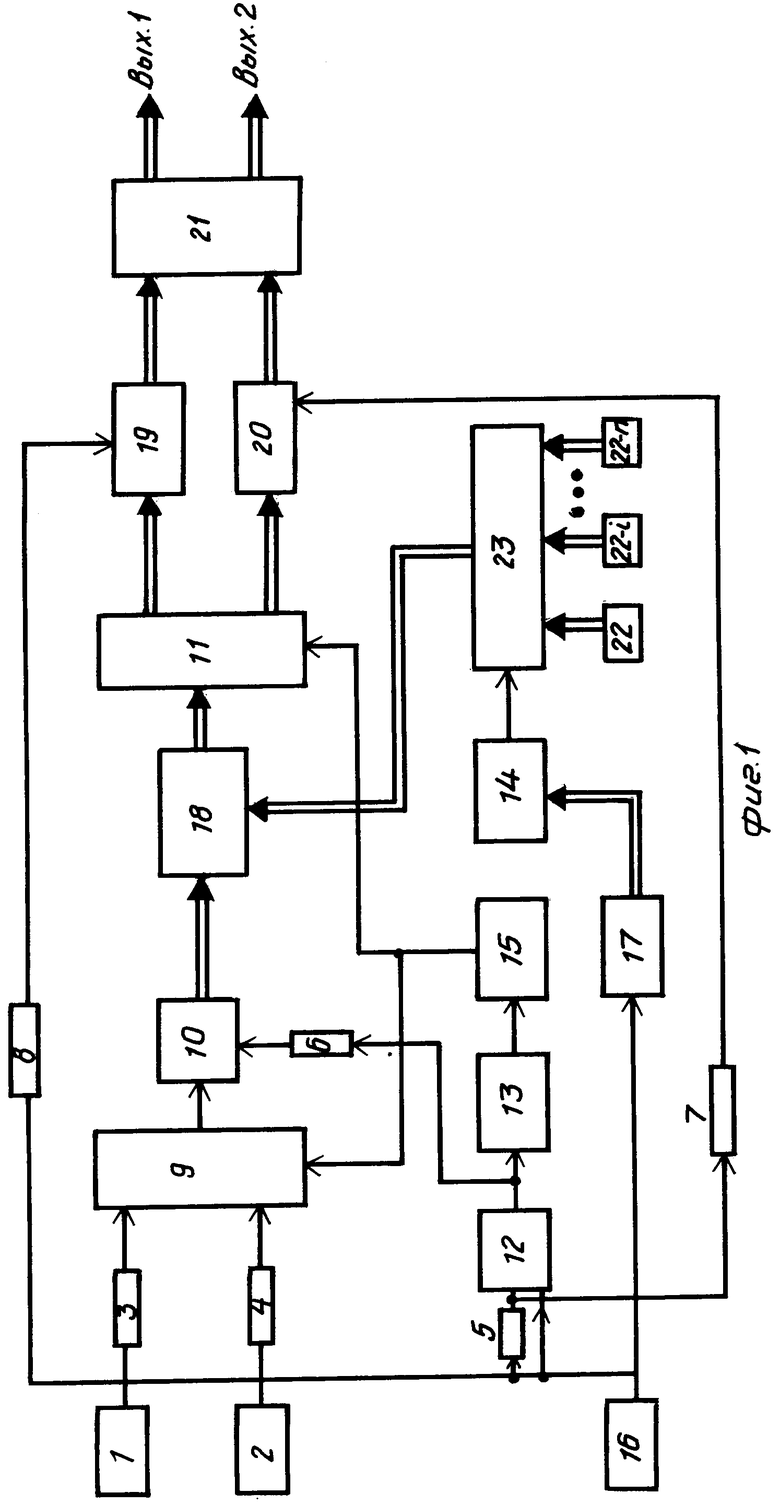
Устройство для определения неровностей на поверхности катания рельса содержит два датчика 1 и 2 ускорений, прикрепленных к буксам одной пары вагона-путеизмерителя, шесть линий 3-8 задержки, коммутатор 9 аналоговых сигналов, входы которого через линии 3 и 4 задержки соединены с датчиками 1 и 2 ускорений, а выход связан с одним из входов аналого-цифрового преобразователя 10, выход которого подключен к одному из входов мультиплексора 11 цифровых сигналов. Двухвходовый элемент ИЛИ 12 своим выходом связан со вторым входом аналого-цифрового преобразователя 10 и входом счетчика 13 импульсов. В устройстве имеются два дешифратора 14 и 15 кодов, датчик 16 оборотов колеса, своим выходом связанный со входом цифрового скоростемера 17, выход которого подключен к дешифратору 14 кодов. Входящий в состав устройства умножитель 18 цифровых сигналов своим входом соединен с выходом аналого-цифрового преобразователя 10. Выход умножителя подключен к функциональному входу мультиплексора 11 цифровых сигналов, выходы которого соединены со входами блоков 19 и 20 двукратного интегрирования.
Блок 21 определения траектории движения колеса по головке рельса (далее блок определения траектории) своими входами связан с выходами блоков 19 и 20 двукратного интегрирования. Вновь введенные в устройство m ячеек 22 памяти связаны со входами коммутатора 23 цифровых сигналов, выход которого подключен ко вторым входам умножителя 18 цифровых сигналов.
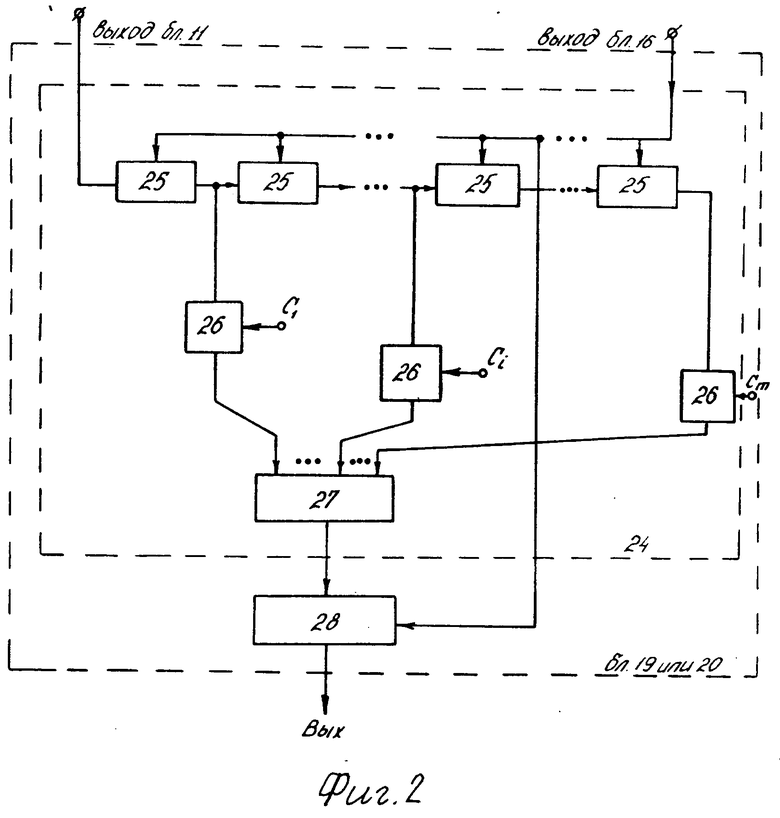
Блок 19 или 20 двукратного интегрирования содержит первый блок 24 интегрирования, в который входят m регистров 25 сдвига, m-1 умножителей 26 цифровых сигналов, входы которых связаны с выходами вышеупомянутых регистров 25 сдвига. Выходы умножителей 26 соединены со входами многовходового сумматора 27, выход которого является функциональных входом второго блока 28 интегрирования, идентичного блоку 24 интегрирования. Второй вход блока 28 интегрирования связан с выходом датчика 16 оборотов колеса через линию 8 задержки, выход же блока 28 интегрирования является выходом блока 19 или 20 двукратного интегрирования.
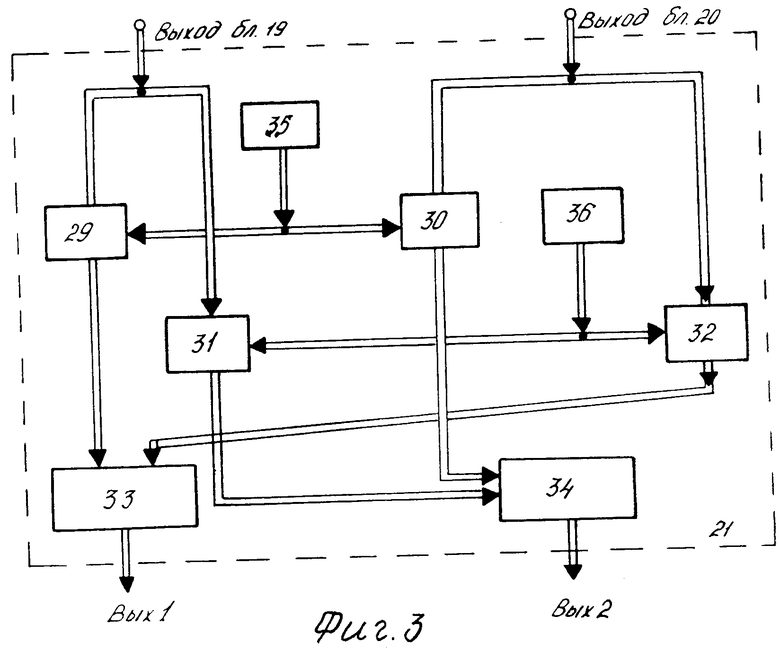
Блок 21 определения траектории движения колеса по головке рельса содержит четыре умножителя 29-32 цифровых сигналов, два двухвходовых сумматора 33 и 34 и две ячейки 35 и 36 памяти. Первые входы умножителей 29 и 31 соединены с выходом блока 19 двукратного интегрирования, второй вход умножителя 29 соединен с выходом ячейки 35 памяти, а второй вход умножителя 31 с выходом ячейки 36 памяти.
Выход умножителя 29 соединен с первым входом двухвходового сумматора 33, выход умножителя 31 с первым входом двухвходового сумматора 34, а первые входы умножителей 30 и 32 соединены с выходом блока 20 двукратного интегрирования. Второй вход умножителя 30 соединен с выходом ячейки 35 памяти, а второй вход умножителя 32 с выходом ячейки 36 памяти. Выход умножителя 30 соединен со вторым входом двухвходового сумматора 34, а выход умножителя 32 со вторым входом двухвходового сумматора 33. Выходы сумматоров 33 и 34 являются выходом устройства.
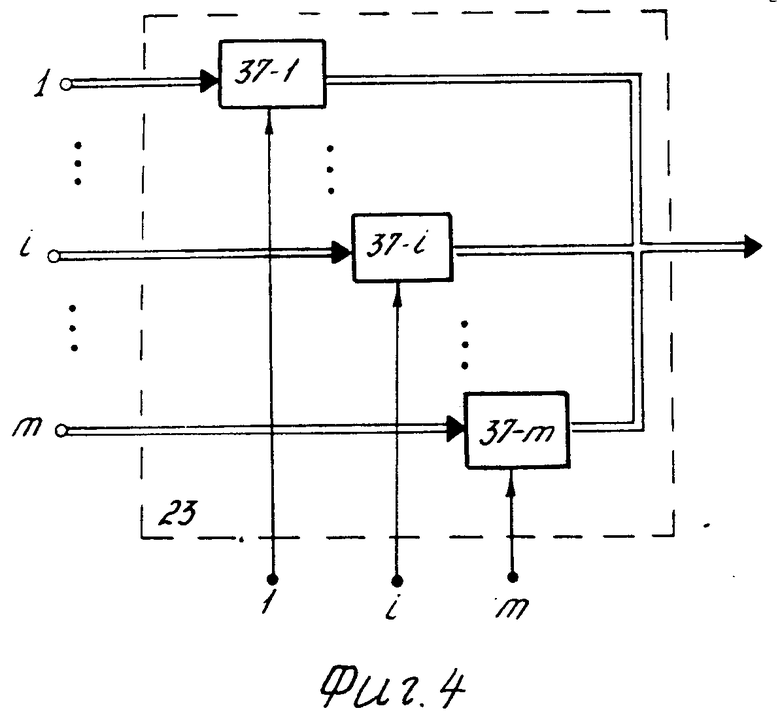
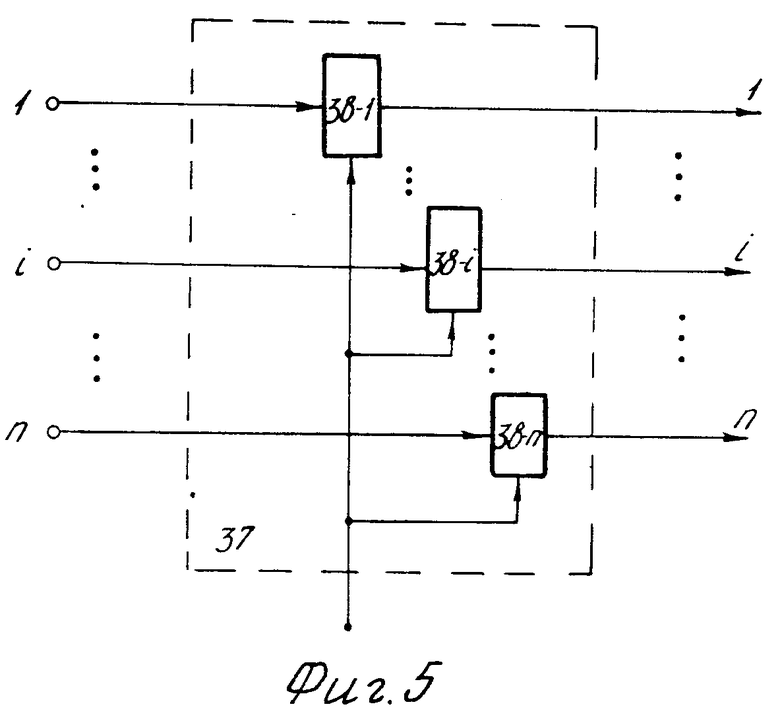
Коммутатор 23 цифровых сигналов содержит mn-разрядных коммутаторов 37, m функциональных входов которых подключены к выходам m ячеек 22 памяти, а управляющие входы n-разрядных коммутаторов 37 к m выходам дешифратора 14. Выходы n-разрядных коммутаторов 37 объединены между собой и соединены со вторым входом умножителя цифровых сигналов 18. Каждый из n-разрядных коммутаторов 37 состоит из n ключей 38, функциональные входы которых подключены к выходам соответствующей n-разрядной ячейки 22 памяти, а управляющие входы объединены между собой и подсоединены к соответствующему выходу дешифратора 14. Выходы ключей 38 i-го n-разрядного коммутатора 37 объединены с соответствующими выходами остальных n-разрядных коммутаторов 37.
Устройство работает следующим образом.
При качении колесной пары, колеса которой не имеют неровностей на поверхности катания, по неровностям на рельсе датчики 1 и 2 ускорений, закрепленные на буксах колесной пары с вертикальной ориентацией оси чувствительности, вырабатывают электрический сигнал, пропорциональный возникающим вертикальным ускорениям. Датчиком 16 оборотов колеса выдается последовательность импульсов, период которых зависит от скорости качения колеса по рельсу. Указанная последовательность импульсов через линию 5 задержки и двухвходовый логический элемент ИЛИ 12 поступает на счетный вход счетчика 13, с выхода которого выдается двоичный код на вход дешифратора 15. Дешифратор 15 выдает управляющий сигнал на управляющий вход аналогового коммутатора 9, через линию 6 задержки на вход "Запуск АЦП" аналого-цифрового преобразователя 10 и управляющий вход цифрового мультиплексора 11. В зависимости от состояния счетчика 13 дешифратор 15 вырабатывает управляющий сигнал, с помощью которого аналоговый коммутатор 9 поочередно подключает на вход аналого-цифрового преобразователя 10 сигналы с датчиков ускорений 1 и 2, запускается с задержкой преобразование в аналого-цифровом преобразователе 10, а также подключается с помощью цифрового мультиплексора 11 выход умножителя 18 цифровых сигналов на входы соответствующих блоков 19 и 20 двукратного интегрирования. Одновременно последовательность импульсов с датчика 16 оборотов колеса подается на вход цифрового скоростемера 17, который на своем выходе формирует код, зависящий от скорости качения колеса. С выхода цифрового скоростемера 17 код подается на вход дешифратора 14, который формирует управляющий сигнал для коммутатора 23 цифровых сигналов. Последний при подаче на его управляющий вход сигнала подключает ко второму входу умножителя 18 цифровых сигналов выход соответствующей ячейки 22 памяти, в которой хранится код, значение которого соответствует коэффициенту коррекции передаточной характеристики блоков 19 и 20 двукратного интегрирования в данном диапазоне скорости качения колеса, что требуется для выполнения условия инвариантности вычисления перемещений колеса по его вертикальным ускорениям к скорости качения колеса по рельсу. Кроме этого, последовательность импульсов с датчика 16 оборотов колеса через линии 7 и 8 задержки поступает на управляющие входы регистров сдвига интеграторов блоков 19 и 20 двукратного интегрирования. С выхода аналого-цифрового преобразователя 10 код, соответствующий сигналу ускорения подключенного в данный момент датчика ускорений, подается на первый вход умножителя 18 цифровых сигналов, который осуществляет коррекцию данных с помощью умножения на коэффициенты, хранящиеся в ячейках 22 памяти и которые однозначно соответствуют соответствующим поддиапазонам в диапазоне допускаемых скоростей качения колеса по рельсу. С выхода умножителя 18 цифровых сигналов код поступает на вход цифрового мультиплексора 11, который выдает его на входы соответствующих блоков 19 и 20 двукратного интегрирования. В блоках 19 и 20 двукратного интегрирования происходит вычисление по скорректированным по амплитуде, в зависимости от скорости качения колеса, сигналам ускорений в цифровой форме вертикальных перемещений колеса при качении его по неровностям на головке рельса. С выходов блоков 19 и 20 двукратного интегрирования коды, соответствующие вертикальным перемещениям буксовых узлов колесной пары, подаются на блок 21 определения траектории, который реализует алгоритм решения системы двух алгебраических уравнений. Указанный блок определения траекторий позволяет исключить взаимовлияние вертикальных перемещений буксовых узлов. Выходы блока 21 являются выходами устройства. Каждый датчик 1 и 2 ускорений фиксирует суммарную составляющую ускорений от двух колес. Для разделения составляющих ускорений в устройство введен блок определения траекторий движения колеса по неровности головки рельса, реализующий функцию решения системы двух уравнений с двумя неизвестными.
Датчиком 16 оборотов колеса задается частота квантования.
Если принять, что при полном обороте колеса за 1 сек датчиком 16 оборотов колеса будет генерироваться последовательность импульсов с частотой fo, то при возрастании скорости в m раз датчиком оборотов колеса будет генерироваться последовательность импульсов с частотой m ˙fo. Время прохождения неровности длины l колесом уменьшается в m раз.
Следовательно, при любой скорости прохождения колесом неровности длины l в устройство будет вводиться одно и то же количество информации, не зависящее от величины m, определяемое только величиной fo, наибольшей по частоте гармоникой в спектре вводимого сигнала. Т.е. в предложенное устройство вводится только необходимое количество информации для определения траектории неисправности, не зависящее от скорости движения колеса. Отсюда, производительность предложенного устройства в m раз выше прототипа.
Траектория Z(l), (где l координата, описывающая ось абсцисс), движения колеса по неровностям головки рельса описывается уравнением:
Z(l) Vn(l-h)·
Vn(l-h)·  Δl
Δl
V(n) an(n-h)Δn
an(n-h)Δn
Δn, Δl величины, обратно пропорциональные величине и имеющие размерности длины,
Vn(l), an(l) соответственно вертикальные составляющие скорости и ускорения движения колеса по головке рельса;
Н предел интегрирования, имеющий размерность длины.
В устройстве функция Z(l) реализуется на выходе блоков 19 и 20 двукратного интегрирования (блок 19 для определения траектории движения колеса по одному рельсу, блок 20 по другому).
На фиг. 6 показаны векторные диаграммы действующих на колесо во время движения сил F, Fn, Fl, скоростей V, Vn, Vl, ускорений a, an, al, (n, l признаки соответственно вертикальных и горизонтальных составляющих). Чем больше скорость Vl движения колеса по головке рельса, тем больше сила F, действующая на колесо от неровности и, следовательно, больше вертикальная составляющая an ускорения, фиксируемая датчиком ускорений на колесе тележки устройства.
В устройство для определения неровностей на поверхности катания рельса вводятся величины ускорений, пропорциональные скорости его движения по головке рельса. Умножитель 18 и m ячеек памяти 22, где записаны значения констант, позволяют величины ускорений, поступающие на входы блоков интегрирования, сделать инвариантными к скорости движения. При значениях констант, обратно пропорциональных скоростям движения колеса по головке рельса, проблема инвариантности (независимости) от скорости поступающей информации в блоки 19 и 20 двукратного интегрирования будет решена.
Данное устройство для определения неровностей на поверхности катания рельса может быть успешно применено в вагонах-путеизмерителях, служащих одним из основных средств диагностики пути, с помощью которых выявляются неисправности пути, устанавливаются очередность и сроки выполнения путевых работ по устранению выявленных неисправностей пути.
Использование: на железнодорожном транспорте, а именно в вагонах-путеизмерителях с устройствами для контроля и определения неровностей на поверхности катания рельса. Сущность изобретения: устройство для определения неровностей на поверхности катания рельса содержит два датчика ускорений, прикрепленные к буксам одной пары вагона-путеизмерителя, линии задержки, коммутатор аналоговых сигналов, датчик оборотов колеса, цифровой скоростемер, дешифраторы кодов, коммутатор цифровых сигналов, двухвходовый логический элемент ИЛИ, счетчик импульсов, два блока двукратного интегрирования, и блок определения траектории движения колеса по головке рельса, ячейки памяти и умножитель цифровых сигналов. В устройство вводятся величины ускорений, пропорциональные скорости движения колеса по головке рельса, которые будучи умноженными на значения констант, записанные в ячейках памяти, поступают на входы интегрирования инвариантными к скорости движения. 6 ил.
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ НА ПОВЕРХНОСТИ КАТАНИЯ РЕЛЬСА, содержащее два датчика ускорений, прикрепленных к буксам одной пары вагона путеизмерителя, коммутатор аналоговых сигналов, датчик оборотов колеса, соединенный с цифровым скоростемером, к выходу которого подключен дешифратор кодов, и два блока двукратного интегрирования, выходы которых соединены с входами блока определения траектории движения колеса по головке рельса, отличающееся тем, что в него введены m ячеек памяти, коммутатор цифровых сигналов, последовательно соединенные двухвходовый элемент ИЛИ, счетчик и дополнительный дешифратор кодов, линии задержки и последовательно соединенные аналого-цифровой преобразователь, умножитель цифровых сигналов и мультиплексор цифровых сигналов, соединенный выходами с входами блоков двукратного интегрирования, а управляющим входом-с выходом второго дешифратора кодов, дополнительно соединенным с управляющим входом коммутатора аналоговых сигналов, функциональные входы которого соединены через одну и другую линии задержки с одним и другим датчиками ускорений соответственно, а выход с функциональным входом аналого-цифрового преобразователя, управляющий вход которого через третью линию задержки соединен с выходом элемента или, один и другой входы которого соединены соответственно непосредственно и через четвертую линию задержки с датчиком оборотов колеса, при этом каждый из информационных входов коммутатора цифровых сигналов соединен с соответствующей i-й ячейкой памяти, управляющий вход с выходом первого дешифратора кодов, выход с вторым входом умножителя цифровых сигналов, а каждая ступень первого и второго блоков двукратного интегрирования включает в себя регистры сдвига, управляющие входы которых соответственно соединены через пятую и последовательно соединенные четвертую и шестую линии задержки с датчиком оборотов колеса, и подключенный к выходам регистров через дополнительные цифровые умножители сумматор.
| Авторское свидетельство СССР N 1542989, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

