Изобретение относится к системам, предназначенным для измерения пространственных параметров рельсовых путей или их отклонений от нормы и может быть также использовано для определения характеристик поверхностей, грунтовых неровностей искусственного и природного происхождения в условиях, не позволяющих производить подобные измерения контактными методами, отличных от нормальной атмосферной среды, ограниченной видимости и подвижности человека, преимущественно контроль подводной части рельсовых путей, предназначенных для подъема и спуска судов.
Технический результат, достигаемый изобретением - дистанционное определение положения пути в трех измерениях в труднодоступных зонах.
На фиг.1 представлена структурная схема устройства; на фиг.2 приведена зависимость отклонения профиля рельс от прямой линии по длине пути; на фиг. 3 приведена зависимость изменения межрельсового расстояния по длине пути; на фиг.4 - условное изометрическое изображение слиповой плоскости.
Устройство состоит (см.фиг.1) из транспортной платформы 1, на которой размещены датчики первичной информации. В качестве датчиков первичной информации используют гироскопический датчик 2 курса, гироскопический датчик 3 угла наклона по курсу (тангажа), гироскопический датчик 4 наклона пути в поперечном профиле (датчик крена), датчик 5 пройденного пути, датчик 6 межрельсового расстояния и датчик 7 глубины погружения транспортной платформы 1. Выходным параметром всех датчиков является напряжение, величина которого пропорционально связана с соответствующим измеряемым параметром. Выходы всех датчиков подключены к соответствующим входам коммутатора 8 аналоговых сигналов, предназначенного для поочередного подключения выходов датчиков 2-7 ко входу аналого-цифрового преобразователя (АЦП) 9, а кодовые выходы АЦП 9 подключены к соответствующим входам коммутатора 10 цифровых сигналов. Управляет коммутаторами 8, 9 счетчик 11, вход которого подключен к выходу тактового генератора 12. Вычислительный блок 13 и регистрирующее устройство 14 размещены стационарно. Выход вычислительного блока 13 соединен с входом регистрирующего устройства 14. Выход коммутатора 10 цифровых сигналов подключен к входу вычислительного блока 13 через линию 15 связи.
Устройство работает следующим образом.
Принцип работы устройства для определения пространственного положения рельсового пути основан на непрерывной регистрации информации с датчиков 2-7, размещенных на движущейся по рельсовому пути транспортной платформе 1, преобразовании поступающей информации в цифровую форму, передачи этой информации на стационарно размещенный вычислительный блок 13, преобразовании получаемых данных в пространственные координаты рельсового пути (в соответствии с нижеприведенными формулами) и фиксации этих координат в регистрирующем блоке 14. Конечные результаты могут быть представлены регистрирующим блоком 14 как в виде таблиц с данными о трех координатах каждой точки пути, в которой производилось измерение, так и в виде графиков (см. фиг.2, 3) для одного пути или условных изометрических изображений для оценки взаимного расположения нескольких расположенных рядом рельсовых путей (см.фиг.4).
При движении платформы 1 с установленными на ней датчиками 2-7 происходит поочередное подключение выхода каждого из датчиков к входу АЦП 9 через коммутатор 8 аналоговых сигналов. АЦП 9 преобразует напряжение, поступающее с выхода соответствующего датчика в параллельный цифровой код. Передача получаемых данных в вычислительный блок 13 осуществляется в виде последовательного кода через линию 15 связи. Для преобразования параллельного цифрового кода в последовательный и предназначен коммутатор 10 цифровых сигналов. С его помощью происходит поочередное подключение выходных разрядов АЦП 8 к линии 15 связи. Синхронизация процессов опроса датчиков 2-7 и преобразования параллельного кода в последовательный происходят с помощью счетчика 11 и тактового генератора 12. Внутренняя структура указанных устройств известна. В качестве линии 15 связи может быть использована, например проводная линия на основе гибкого герметичного кабеля или оптический канал (волоконно-оптическая линия связи) или радиоканал на основе стандартных или специализированных передатчиков. Информация, поступающая от датчиков 2-7 в вычислительный блок 13, используется следующим образом.
Датчик 5 пути предназначен для получения данных о длине пройденного пути и привязке в ней данных других датчиков. Его показания связаны с угловым положением одного из колес транспортной платформы 1, используемого в качестве измерительного. В вычислительном блоке 13 происходит подсчет числа оборотов измерительного колеса при движении транспортной платформы 1. Длина L пройденного пути определяется как L=dl˙n, (1) где L - длина пути, пройденная транспортной платформой 1;
n - число оборотов измерительного колеса;
dl - длина окружности измерительного колеса.
Гироскопический датчик 2 курса выдает информацию о направлении движения транспортной платформы 1 в горизонтальной плоскости. В сочетании с информацией, поступающей от датчика 5 пути, происходит определение координат транспортной платформы 1 в горизонтальной плоскости. Восстановление производится методом линейно-кусочной аппроксимации в соответствии с формулой X =  cos(K(n))·dl ; (2) Y =
cos(K(n))·dl ; (2) Y =  sin(K(n))·dl ; (3) где Х, Y - плановые координаты платформы в декартовой системе координат;
sin(K(n))·dl ; (3) где Х, Y - плановые координаты платформы в декартовой системе координат;
K(n) - текущий угол курса относительно оси Х, совпадающей с первоначальным направлением движения транспортной платформы 1.
Определение координаты транспортной платформы 1 в вертикальной плоскости происходит на основе измерения гироскопическим датчиком 3 угла отклонения транспортной платформы 1 от первоначального направления в вертикальной плоскости и информации от датчика 7 глубины погружения. Восстановление также производится методом линейно-кусочной аппроксимации в соответствии с формулой H =  sin(df(n) + fO)dl , (4) где Н - координата транспортной платформы 1 в вертикальной плоскости;
sin(df(n) + fO)dl , (4) где Н - координата транспортной платформы 1 в вертикальной плоскости;
df - угол отклонения транспортной платформы 1 от первоначального направления в вертикальной плоскости;
fo - средний угол наклона пути, определяющийся следующим образом: fo = arcsin ( ( dH / Lp ) ), (5) где dН - разность показаний датчика 7 глубины погружения в конечной и начальной точках рельсового пути;
Lp - расстояние между конечной и начальной точкой пути.
Показания гироскопического датчика 4 бокового крена и датчика 6 межрельсового расстояния используются для раздельного определения высоты головок правого и левого рельсов в соответствии с формулой: HL = H - (В/2)˙sin (b); (6) HR = H + (B/2)˙sin (b); (7) где HL - высота левого рельса;
HR - высота правого рельса;
B - межрельсовое расстояние;
b - угол бокового крена относительно горизонтальной плоскости.
Кроме того, показания датчика 6 межрельсового расстояния используются непосредственно как один из важных информационных параметров, так как отклонение ширины рельсовой колеи от стандартного значения позволяет судить об износе подводной части рельсового пути. В качестве такого датчика может быть использовано либо механическое устройство, преобразующее с помощью системы рычагов расстояние между рельсами в угол поворота измерительного потенциометра, либо ультразвуковой эхо-импульсный дальномер, принцип действия которого основан на изменении времени задержки принимаемого эхо-импульса при изменении расстояния до отражающей плоскости.
В качестве гироскопических датчиков 2 и 3 могут быть использованы выпускаемые промышленностью гироскопические приборы, предназначенные для работы в системах ориентации летательных аппаратов. Например, в качестве гироскопического датчика 3 наклона по курсу и гироскопического датчика 4 бокового крена возможно использование прибора "Центральная гироскопическая вертикаль ЦГВ-10". В качестве гироскопического датчика курса возможно использование гироскопического прибора ГА-5.
После определения пространственных координат рельсового пути в соответствии с вышеприведенными зависимостями полученные данные поступают из вычислительного блока 13 в регистрирующий блок 14. Здесь итоговая информация представляется на экране дисплея в виде графиков или таблиц цифровых данных, которые возможно при необходимости перенести на бумагу с помощью самописца или печатающего устройства. Внутренняя структура вычислительного блока 13, реализующего вышеприведенные математические соотношения, и регистрирующего блока 14 является известным техническим решением. Эти блоки могут быть реализованы с помощью цифровой схемотехники с использованием стандартных микросхем и схемотехнических решений либо с использованием средств вычислительной техники.
Питание всех устройств может осуществляться как от стационарной береговой сети, так и от автономного блока питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2081232C1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЖИДКИХ СРЕД | 1992 |
|
RU2045055C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ НА ПОВЕРХНОСТИ КАТАНИЯ РЕЛЬСА | 1992 |
|
RU2035534C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ СИГНАЛОВ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1997 |
|
RU2111504C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2261302C2 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| Способ диагностики продольного профиля железнодорожных путей сортировочного парка | 2022 |
|
RU2779427C1 |
Изобретение относится к системам, предназначенным для измерения пространственных параметров рельсовых путей или их отклонений от нормы, и может быть использовано для определения характеристик поверхностей, грунтовых неровностей искусственного и природного происхождения в условиях, не позволяющих производить подобные измерения контактными методами, отличных от нормальной атмосферной среды, ограниченной видимости и подвижности человека, преимущественно контроль подводной части рельсовых путей, предназначенных для подъема и спуска судов. Сущность изобретения: устройство содержит смонтированные на движущейся по пути транспортной платформе 1 датчик 5 пройденного пути, гироскопический датчик 2 курса, гироскопический датчик 3 наклона по курсу, выходы которых связаны с региструющим блоком 14. Устройство снабжено гироскопическим датчиком 4 наклона пути в поперечном профиле, датчиком 6 межрельсового расстояния и датчиком 7 глубины погружения, причем выходы указанных датчиков соединены с коммутатором 8 аналоговых сигналов для поочередного подключения выхода каждого датчика на выход аналого-цифрового преобразователя 9, преобразующего сигналы напряжения датчиков в параллельный код, выходы аналого-цифрового преобразователя 9 подключены к входам коммутатора 10 цифровых сигналов, выход которого линией 15 связи соединен с вычислительным блоком 13 для подачи на его вход последовательного кода сигналов, а выход последнего подключен к регистрирующему блоку 14, причем управляющие входы коммутатора 8 аналоговых сигналов и коммутатора 10 цифровых сигналов подключены к выходам соответственно старших и младших разрядов счетчика 11, вход которого соединен с выходом тактового генератора 12. 4 ил.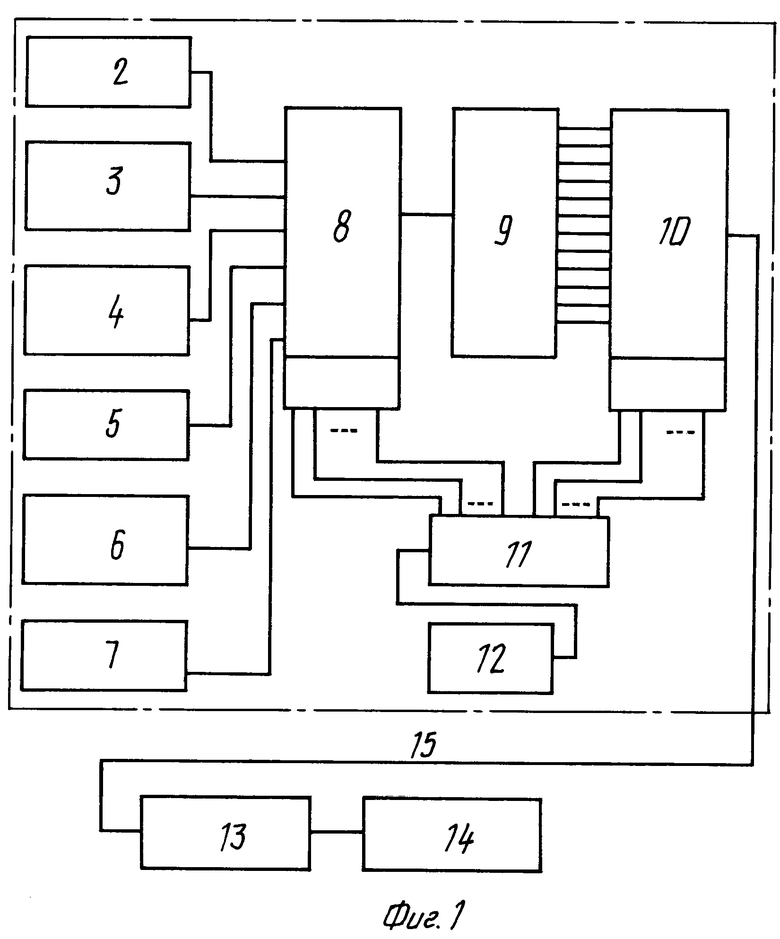
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ, содержащее смонтированные на движущейся по пути транспортной платформе датчик пройденного пути, гироскопический датчик курса, гироскопический датчик наклона по курсу, выходы которых связаны с регистрирующим блоком, отличающееся тем, что оно снабжено гироскопическим датчиком наклона пути в поперечном профиле, датчиком межрельсового расстояния и датчиком глубины погружения, причем выходы указанных датчиков соединены с коммутатором аналоговых сигналов для поочередного подключения выхода каждого датчика на вход аналого-цифрового преобразователя, преобразующего сигналы напряжения датчика в параллельный код, выходы аналого-цифрового преобразователя подключены к входам коммутатора цифровых сигналов, выход которого линией связи соединен с вычислительным блоком для подачи на его вход последовательного кода сигналов, а выход последнего подключен к регистрирующему блоку, причем управляющие входы коммутатора аналоговых сигналов и коммутатора цифровых сигналов подключены к выходам соответственно старших и младших разрядов счетчика, вход которого соединен с выходом тактового генератора.
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ПЛАНА И ПРОДОЛЬНОГО ПРОФИЛЯ ПУТИ | 1973 |
|
SU432262A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
