Изобретение относится к землеройным машинам в частности, к роторным траншейным экскаваторам.
Известен роторный траншейный экскаватор с полуприцепным рабочим органом. Он состоит из тягача и полуприцепного рабочего органа, соединенного с помощью промежуточной рамы и четырех (по два с каждой стороны) попарно последовательно расположенных цилиндров, образующих с промежуточной рамой, рамой рабочего органа и диагональной стойкой шарнирный четырехзвенник. Рабочий орган и промежуточная рама шарнирно соединены с поперечной балкой опорно-поворотного механизма скольжения, расположенного на тягаче. При увеличении глубины копания особенно в тяжелых и мерзлых грунтах, в связи с постоянно возникающими изменениями поперечных уклонов местности, которые невозможно точно спланировать, тягач, изменяя поперечный наклон, заставляет наклоняться рабочий орган, который до этого отрывал траншею с наклоном боковых стенок, соответствующим другому поперечному положению наклону тягача. При изменении наклона тягача и соответствующему ему наклона рабочего органа ему приходится подрывать боковые стенки траншеи в соответствии с новым положением тягача. При разработке тяжелых и мерзлых грунтов это вызывает большие боковые усилия на ротор в нижней части траншеи, скручивающие ротор и всю систему рам, соединяющих тягач и рабочий орган. Чем больше глубина копания, тем сильнее сказываются эти факторы.
В связи с освоением северных месторождений газа, в частности в района Ямала, где вечная мерзлота сочетается с необходимостью укладки трубопроводов на большую глубину, указанные проблемы еще больше обостряются.
Недостатком известной конструкции является то, что при разработке мерзлых грунтов возрастают колебания нагрузки и тягового усилия, связанные с выходом очередного ковша из забоя, когда происходит скачок нагрузки. Поскольку горизонтальный шарнир поперечной балки плоского опорно-поворотного устройства соединения тягача и рабочего органа расположен достаточно высоко, именно не ниже уровня самого плоского опорно-поворотного механизма, эти колебания нагрузки создают относительно уровня земли большой момент, и это приводит к значительной динамике всей машины. Опустить же ниже опорно-поворотное устройство не представляется возможным из-за размещения под ним трансмиссии привода хода.
В данном изобретении предлагается экскаватор, в котором устранены отмеченные выше недостатки.
Экскаватор включает полуприцепной рабочий орган и систему рам, соединенных с тягачом плоским опорно-поворотным механизмом скольжения, имеющим поперечную балку и диск с круговым пазом, в котором установлено кольцо, неподвижно закрепленное на раме тягача, и замковое кольцо, закрепленное с нижней стороны диска.
Устранение недостатков известной конструкции достигается тем, что по оси диска в плоскости, перпендикулярной балке, выполнен прямоугольный вырез. К диску жестко прикреплена, имеющая углубление, закрытая с трех сторон обечайка, в боковых стенках которой выполнены два соосных отверстия, перпендикулярных оси балки. Балка в средней части имеет проушину с отверстием, размещенную в углублении обечайки диска и соединенную с обечайкой посредством пальца, которые образуют шарнирное соединение балки с диском, перпендикулярное оси балки. Плоскость этого соединения совпадает с плоскостью оси пальцев Г-образных кронштейнов, посредством которых опорно-поворотный механизм связан с системой рам рабочего органа. Ось этих пальцев расположена ниже плоскости опорно-поворотного механизма. По обеим сторонам от шарнирного соединения поперечной балки расположены два симметричных гидроцилиндра, проушины корпусов которых закреплены в стаканах, жестко соединенных с поперечной балкой. Проушины штоков связаны с диском опорно-поворотного механизма. Балка снабжена размещенным в ее средней части инерционным балансирным механизмом для фиксации поперечного наклона тягача и подачи сигнала на электроуправляемые золотники, которые регулируют подачу жидкости в гидроцилиндры. Штоковая полость одного гидроцилиндра соединена с поршневой полостью другого цилиндра, и наоборот.
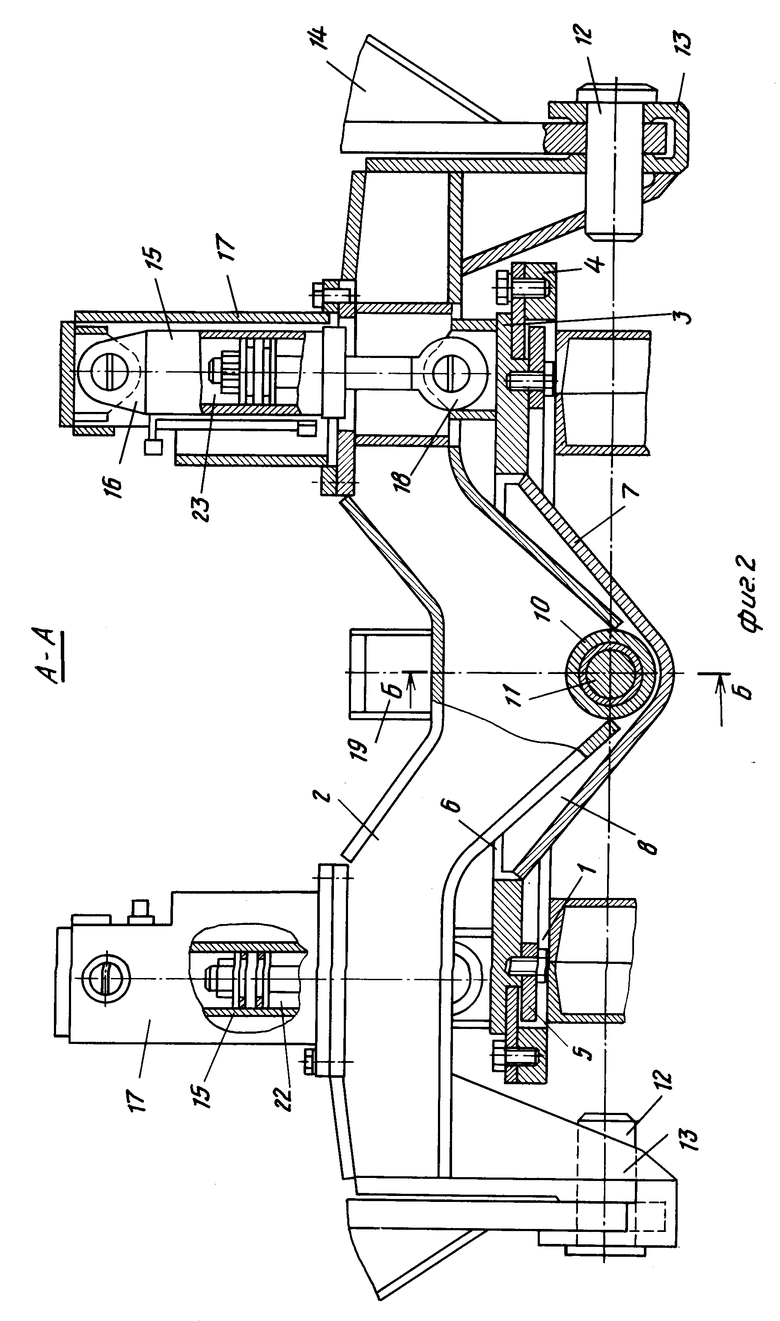
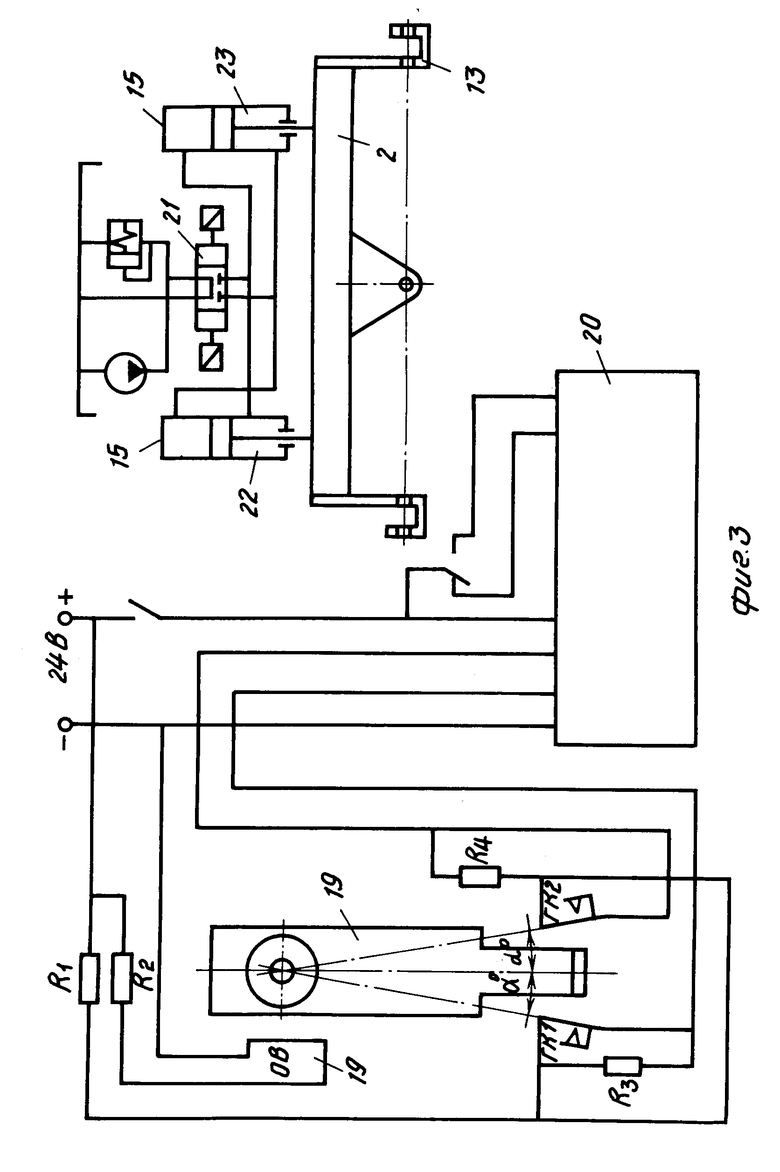
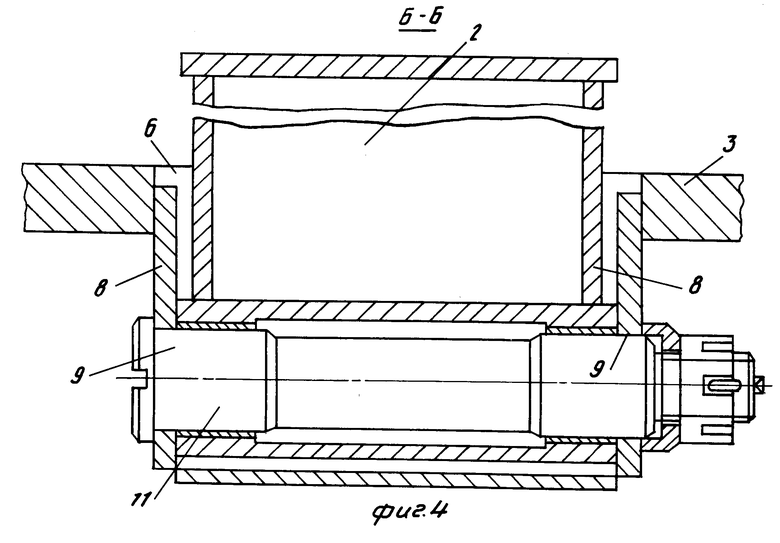
На фиг.1 показан экскаватор, общий вид; на фиг.2 разрез А-А на фиг.1; на фиг.3 принципиальная схема электрогидравлического управления подачей жидкости в цилиндры; на фиг.4 разрез Б-Б на фиг.2.
Роторный экскаватор включает плоский опорно-поворотный механизм 1 скольжения, поперечную балку 2 опорно-поворотного механизма, диск 3 с круговым пазом, кольцо 4, неподвижно закрепленное на раме тягача, замковое кольцо 5, закрепленное с нижней стороны диска 3. Прямоугольный вырез 6 выполнен по оси диска в плоскости, перпендикулярной балке.
Закрытая с трех сторон обечайка 8 имеет углубление 7 и два соосных отверстия 9 в ее боковых стенках, перпендикулярные оси балки. Проушина 10 с отверстием в поперечной балке размещена в углублении обечайки диска. Палец 11 соединяет проушину с отверстиями обечайки. С помощью этих конструктивных элементов создается шарнирное соединение балки с диском, перпендикулярное оси балки. Плоскость оси пальца 11 совпадает с осью пальцев 12 Г-образных кронштейнов 13, посредством которых опорно-поворотный механизм связан с системой рам рабочего органа 14. Благодаря этому при наклонах балки вокруг среднего шарнирного соединения в обе стороны от горизонтального положения конечные точки балки отклоняются от номинального положения на минимальное расстояние. Это особенно важно, т.к. зазор между концами балки и гусеницами тягача незначителен и в противном случае его не хватило бы для осуществления качаний (наклонов) поперечной балки 2.
Г-образные кронштейны 13 прикреплены к концам поперечной балки 2. Ось пальцев 12, соединяющих тягач с системой рам рабочего органа Г-образных кронштейнов 13, находится ниже плоскости опорно-поворотного механизма. Симметрично расположены по обеим сторонам от шарнирного соединения поперечной балки два гидроцилиндра 15. Проушины 16 корпусов цилиндров закреплены в стаканах 17, жестко соединенных с поперечной балкой 2. Проушины 18 штоков цилиндров связаны с диском 3 опорно-поворотного механизма. Инерционный балансирный механизм 19 для фиксации поперечного наклона тягача размещен в средней части балки. От механизма 19 через усилительный блок 20 подается электросигнал на электроуправляемые золотники 21, обеспечивающие подачу жидкости в гидроцилиндры. Штоковая полость 22 одного цилиндра соединена с поршневой полостью 23 другого цилиндра. При копании мерзлых и вечномерзлых грунтов и постоянном перемещении экскаватора на местности, имеющей, несмотря на предварительно спланированную поверхность, различные поперечные уклоны. Тягач 24 всегда расположен с некоторым поперечным уклоном. Рабочий орган 25 открывает траншею с соответствующим наклоном боковых стенок траншеи. Чем больше глубина траншеи, тем больше боковые стенки будут отклоняться в сторону от геометрической вертикали. По мере перемещения тягача и изменения поперечного уклона местности рабочий орган также при жестком относительно продольной оси машины соединении с тягачом будет изменять свой наклон и для этого должен будет подрывать промерзшие боковые стенки траншеи в нижней ее части. Возникнут большие поперечные нагрузки, скручивающие всю систему металлоконструкций, что вызовет нерасчетные нагрузки и будет приводить к частным поломкам.
В описываемом экскаваторе этого удается избежать. При начинающемся новом поперечном наклоне тягача 24 инерционный балансирный механизм 19 с помощью усилительного блока 20 подает электросигнал на электроуправляемые золотники 21, с помощью которых будет осуществляться подача масла в соответствующие полости цилиндров 15 (например в штоковую полость 21 одного цилиндра и поршневую 23 другого). Цилиндры начнут перемещать (поворачивать) поперечную балку 2 в сторону, противоположную наклону тягача, до тех пор, пока она и балансирный механизм 19 не займут соответственно горизонтальное и вертикальное положения. Поперечная балка 2 вместе с проушиной 10, заходящей в прямоугольный вырез 6 с закрытой с трех сторон обечайкой 7, поворачивается относительно соосных отверстий 9 в боковых стенках обечайки с помощью пальца 11, закрепленного в проушине поперечной балки. Благодаря тому, что плоскость оси пальца 11 совпадает с плоскостью оси пальцев 12 боковых Г-образных кронштейнов 13, связывающих опорно-поворотный механизм с системой рам рабочего органа 14, при повороте балки вокруг среднего шарнира в обе стороны от горизонтального положения конечные точки балки отклоняются от номинального положения на минимальное расстояние. Это важно в связи с тем, что зазор между концом балки и гусеницей тягача мал и при другом расположении пальцев 11 качания (наклоны) поперечной балки 2 были бы неосуществимы. Цилиндры, перемещающие (поворачивающие) поперечную балку, осуществляют это благодаря тому, что проушины корпусов цилиндров закреплены в стаканах 17, жестко соединенных с поперечной балкой, а проушины 18 штоков цилиндров соединены с диском 3 опорно-поворотного механизма. При возникновении нового наклона тягача действие системы повторится и тем самым в заданных конструктивно пределах (например, ±5о) рабочий орган независимо от изменения поперечных наклонов тягача в ту или другую сторону будет сохранять вертикальное положение. Благодаря этому исключается возникновение боковых нагрузок в нижней части траншеи на рабочий орган, а стенки траншеи будут строго вертикальны.
Благодаря тому, что Г-образные кронштейны 13, прикрепленные к концам поперечной балки 2, обеспечивают положение пальцев, соединяющих тягач 24 с системой рам 14 рабочего органа 25, ниже уровня плоского опорно-поворотного механизма и тем самым создают относительно уровня земли от тягового усилия уменьшенный момент, при колебаниях нагрузки и тягового усилия, связанных с выходом очередного ковша из забоя (особенно при разработке меpзлых грунтов), динамика машины в целом значительно снизится по сравнению с существующими конструкциями.
Таким образом, данное техническое решение повышает эксплуатационные качества роторных траншейных экскаваторов (их надежность, работоспособность, эргономические характеристики), особенно при разработке мерзлых грунтов, что представляет ценность в связи с большим комплексом работ по освоению газовых месторождений полуострова Ямал.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1993 |
|
RU2035551C1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1992 |
|
RU2034961C1 |
| РАБОЧИЙ ОРГАН РОТОРНОГО ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1993 |
|
RU2039164C1 |
| КОЛЕСНЫЙ ТЯГАЧ-ТРАКТОР РОТОРНОГО ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1992 |
|
RU2034962C1 |
| Экскаватор непрерывного действия | 1988 |
|
SU1606621A1 |
| Комплексный универсальный кабелеукладчик | 1988 |
|
SU1714056A1 |
| Роторный траншейный экскаватор | 1975 |
|
SU580285A1 |
| Роторный экскаватор для рытья траншей | 1959 |
|
SU131273A1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |
| Рабочее оборудование роторного экскаватора | 1982 |
|
SU1049629A1 |

Использование: для разработки мерзлых и вечномерзлых грунтов. Сущность изобретения: благодаря возможности обеспечивать вертикальное положение рабочего органа независимо от поперечных наклонов тягача в связи с поперечными неровностями местности, исключается подрыванием ротором боковых стенок внизу траншеи. Стенки траншеи имеют строго вертикальное направление. Отсутствуют боковые усилия в нижней части ротора, что исключает возникновение скручивающих нагрузок на металлоконструкции и их поломки. Понижение шарнира, соединяющего балку опорно-поворотного устройства тягача с системой рам абочего органа, несмотря на расположение трансмиссии привода хода под этим опорно-поворотным устройством, ниже уровня этого опорно-поворотного устройства позволяет снизить момент от колебаний тягового усилия и динамику экскаватора при разработке и вечномерзлых грунтов. 4 ил.
РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР, включающий полуприцепной рабочий орган и систему рам, соединенных с тягачом плоским опорно-поворотным механизмом скольжения, имеющим поперечную балку и диск с круговым пазом, в котором установлено кольцо, неподвижно закрепленное на раме тягача, и замковое кольцо, прикрепленное с нижней стороны диска, отличающийся тем, что по оси диска в плоскости, перпендикулярной балке, выполнен прямоугольный вырез, к диску жестко прикреплена имеющая углубление, закрытая с трех сторон обечайка, в боковых стенках которой выполнены два соосных отверстия, перпендикулярных оси балки, а балка в средней части имеет проушину с отверстием, размещенную в углублении обечайки диска и соединенную с обечайкой посредством пальца, которые образуют шарнирное соединение балки с диском, перпендикулярное оси балки, при этом плоскость этого соединения совпадает с плоскостью оси пальцев Г-образных кронштейнов, посредством которых опорно-поворотный механизм связан с системой рам рабочего органа, ось этих пальцев расположена ниже плоскости опорно-поворотного механизма, по обеим сторонам от шарнирного соединения поперечной балки расположены два симметричных гидроцилиндра, проушины корпусов которых закреплены в стаканах, жестко соединенных с поперечной балкой, а проушины штоков связаны с диском опорно-поворотного механизма, при этом балка снабжена размещенным в ее средней части инерционным балансирным механизмом для фиксации поперечного наклона тягача и подачи сигнала на электроуправляемые золотники, регулирующие подачу жидкости в гидроцилиндры.
| Роторный траншейный экскаватор | 1975 |
|
SU580285A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
