Изобретение относится преимущественно к мясной промышленности и предназначено для производства колбасных изделий, а именно для приготовления колбасного фарша путем перемешивания необходимых по рецептуре ингредиентов, дальнейшего транспортирования и шприцевания его в колбасную оболочку или иную форму. Изобретение может быть также использовано в пищевой, химической, молочной, фармацевтической отраслях промышленности, в медицине, сельском хозяйстве и строительстве для эффективного перемешивания, транспортирования и управляемого вытеснения вязкопластичных материалов.
Известно устройство для перемешивания и транспортирования материалов, преимущественно колбасного фарша, содержащее корпус, размещенную в нем гибкую оболочку с отверстиями, соединенную с источником вибрации [1]
Недостатком этого устройства является сложность конструкции и невозможность регулировки параметров процесса смешения.
Наиболее близким к предлагаемому является известное устройство для перемешивания и транспортировки вязкопластичных материалов, содержащее гибкую неметаллическую оболочку с входным и выходным отверстиями, механизм деформации гибкой оболочки [2]
В этом устройстве механизм деформации оболочки выполнен в виде нескольких пневно- или гидроцилиндров со штоками, к которым жестко прикреплены пяты в виде плит. В этом случае плиты перемещаются в пространстве, оставаясь параллельными себе, что является лишь частным случаем плоскопараллельного движения. Такая ограниченность пространственной эволюции деформирующей плиты снижает эффективность перемешивания, так как течение среды из-под плиты примерно одинаково во все стороны. Для получения хорошего качества перемешивания необходимо увеличивать длительность процесса, при этом растут энергозатраты и нагрев перемешиваемой среды, что сказывается на качестве готового продукта. Недостаток работы устройства связан с тем, что плита имеет одну кинематическую связь с приводом.
Предлагаемое изобретение направлено на повышение эффективности работы устройства, расширение его функциональных возможностей и повышение качества готового продукта.
Это достигается тем, что в предлагаемом устройстве механизм деформации гибкой неметаллической оболочки, содержащей подвижный элемент в виде плиты, кинематически соединенной с приводом, привод соединен с плитой несколькими кинематическими связями.
Наличие у деформирующей плиты нескольких кинематических связей с приводом обеспечивает ей произвольную пространственную эволюцию. Например, если деформирующая плита имеет две кинематические связи от пневмо- или гидропривода в виде двух параллельных штоков, соединенных с ней цилиндрическими шарнирами с параллельными осями вращения, то плита может совершать плоское или плоскопараллельное движение. Такое же движение плита совершает, если число штоков больше двух, но все они расположены в одной плоскости.
Если деформирующая плита имеет, например, три кинематические связи в виде трех параллельных и не лежащих в одной плоскости штоков пневмо- или гидроцилиндров, соединенных с ней сферическими шарнирами, то плита может совершать пространственное движение. Три это минимальное число связей для создания пространственного движения деформирующей плиты.
Возможность пространственного движения плиты существенно повышает эффективность работы устройства, так как создает ранее не возможные направленные течения обрабатываемой среды в оболочке. Это ускоряет процесс перемешивания при одновременном повышении его качества. Кроме того, это улучшает и процесс вытеснения обрабатываемой среды из оболочки, так как расположение плиты под углом к оболочке перекрывает, например, входное отверстие или иные направления и увеличивает объем вытесняемой среды в нужном направлении.
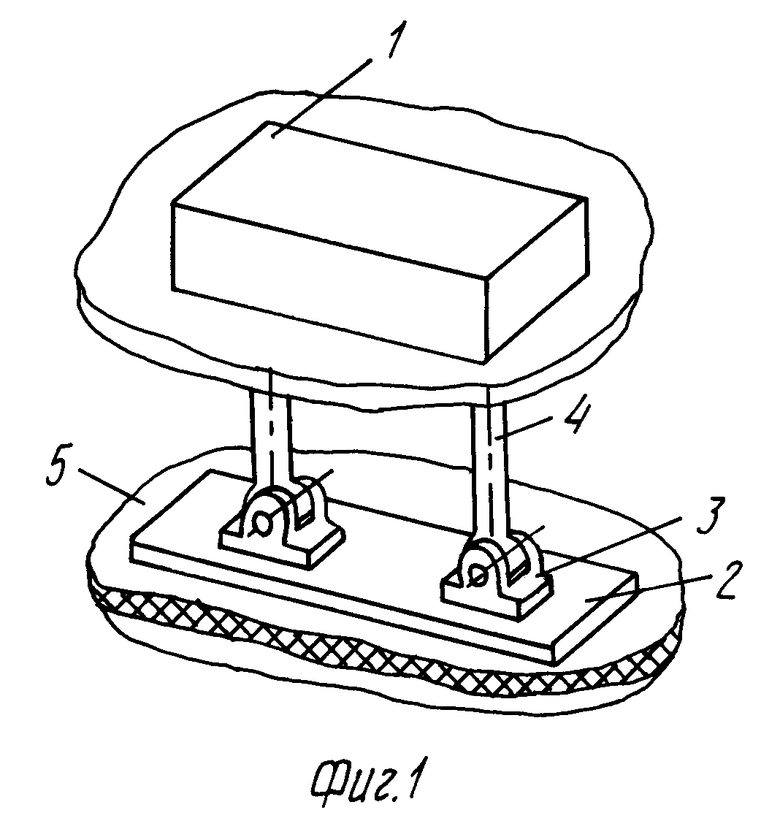
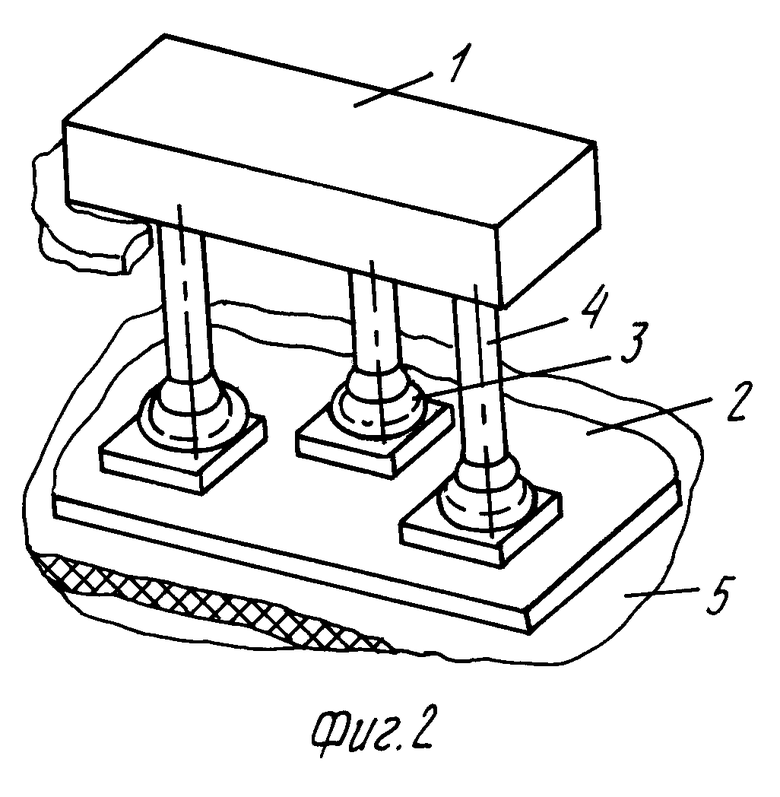
На фиг. 1 изображен вариант выполнения механизма деформации оболочки с двумя кинематическими связями плиты с приводом; на фиг.2 то же, с тремя кинематическими связями плиты с приводом; на фиг.3 варианты выполнения кинематических связей плиты с приводом.
Устройство (фиг. 1) содержит привод 1, например пневмо- или гидравлический, плиту 2, соединенную цилиндрическими шарнирами 3 с двумя штоками 4, оболочку 5. Штоки 4 параллелльны и лежат в одной плоскости. Оси шарниров 3 параллельны.
Устройство работает следующим образом.
В оболочку загружается сырье с другими компонентами по рецептуре. Включается привод 1. Движение от привода 1 через штоки 4 и шарниры 3 передается на плиту 2. Плита совершает программное плоское движение (вертикальное поступательное с одновременным поворотом в шарнирах), деформируя оболочку 5. Это движение плиты создает в оболочке разнонаправленные течения рецептуры, что обеспечивает интенсивное равномерное перемешивание компонентов с сырьем. После перемешивания плита 2 становится под углом к оболочке 5, перекрывая входное загрузочное отверстие. Затем осуществляются опускание плиты 2 и вытеснение содержимого через выходное отверстие оболочки 5 в колбасную оболочку.
Устройство (фиг. 2) содержит привод 1, например гидро- или пневматический, плиту 2, соединенную сферическими шарнирами 3 с тремя штоками 4, оболочку 5. Штоки 4 параллельны и не расположены в одной плоскости.
Устройство работает следующим образом.
В оболочку 5 через входное отверстие загружается фарш по рецептуре. Включается привод 1. Движение от привода 1 через штоки 4 и шарниры 3 передается плите 2. Плита совершает программное пространственное движение, деформируя при этом оболочку 5. Это создает в оболочке разнонаправленные интенсивные течения. При этом обеспечивается интенсивное и равномерное перемешивание компонентов с сырьем. После перемешивания плита 2 становится под углом к оболочке 5, перекрывая входное отверстие. Затем осуществляются управляемое опускание плиты 2 с помощью привода и вытеснение приготовленного фарша через выходное отверстие оболочки 5 в колбасную оболочку. В данном варианте плита 2 имеет большую пространственную подвижность. Процесс идет интенсивнее. Минимальное число кинематических управляемых связей три.
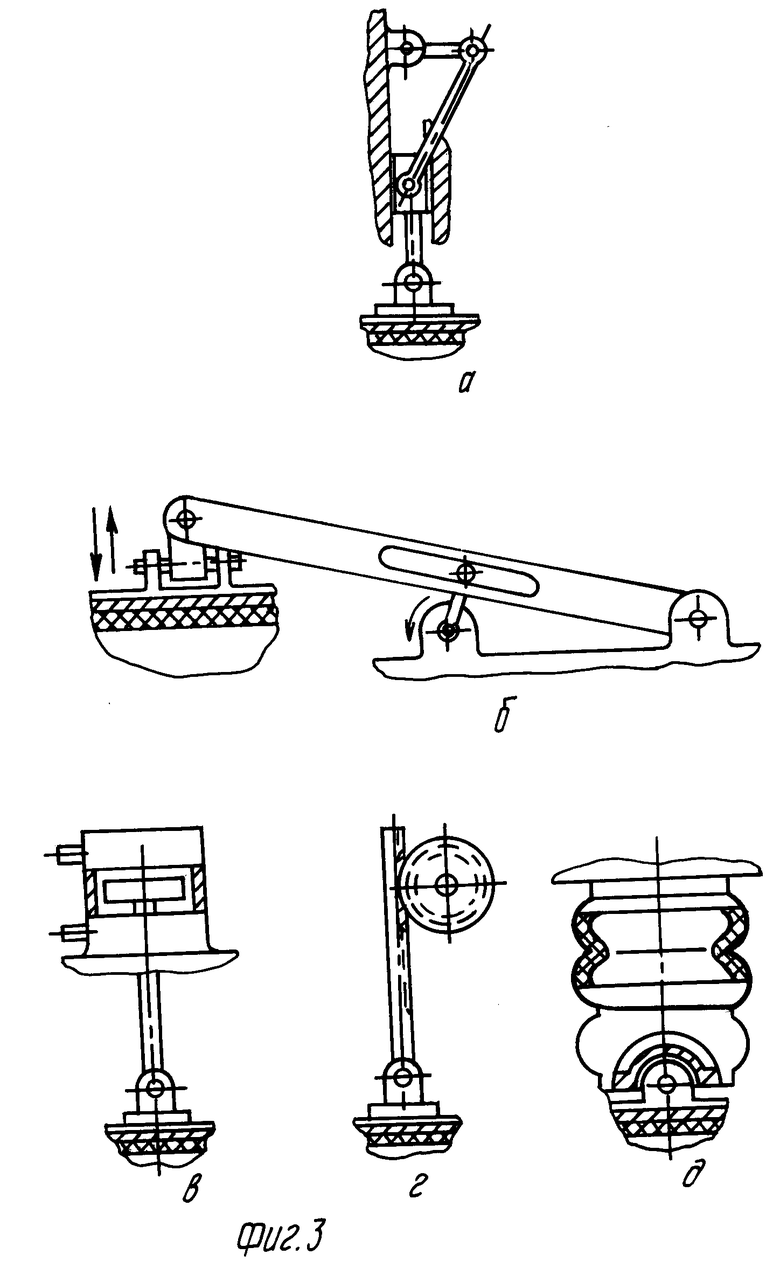
На фиг. 3 приведены примеры различных кинематических связей плиты с приводом: а) кривошипно-шатунная; б) кривошипно-кулисная; в) в форме цилиндра с поршнем и штоком; г) зубчатое колесо с рейкой; д) в форме рифленой пневмокамеры.
Сам привод может быть соединен с одним или несколькими источниками энергии. Это позволяет приводу 1 обеспечивать плите 2 вибрационно-волновое воздействие на оболочку и фарш.
Применение подобных механизмов деформации гибкой неметаллической оболочки расширяет возможности устройства, повышает эффективность его работы и качество готового продукта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемешивания и транспортирования вязкопластичных материалов | 1991 |
|
SU1777554A3 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ И ТРАНСПОРТИРОВАНИЯ ВЯЗКОПЛАСТИЧНЫХ МАТЕРИАЛОВ | 1992 |
|
RU2035867C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ И ТРАНСПОРТИРОВАНИЯ ВЯЗКОПЛАСТИЧНЫХ МАТЕРИАЛОВ | 1992 |
|
RU2035149C1 |
| Способ шприцевания колбасного фарша и устройство для его осуществления | 1991 |
|
SU1792292A3 |
| Способ шприцевания колбасного фарша и устройство для его осуществления | 1991 |
|
SU1792291A3 |
| СПОСОБ ВЫГРУЗКИ ВЯЗКОПЛАСТИЧНЫХ ПРОДУКТОВ ИЗ ЕМКОСТИ | 1992 |
|
RU2008241C1 |
| Способ фильтрования суспензий и устройство для его осуществления | 1989 |
|
SU1690804A1 |
| Устройство для перемешивания и транспортирования материалов,преимущественно компонентов колбасного фарша | 1983 |
|
SU1220684A1 |
| Способ производства колбасных изделий | 1984 |
|
SU1261611A1 |
| УСТРОЙСТВО для ПРИГОТОВЛЕНИЯ КОЛБАСНЫХ ИЗДЕЛИЙ БЕЗ ОБОЛОЧКИ | 1969 |
|
SU249964A1 |
Использование: в мясной промышленности для производства колбасных изделий, а именно для приготовления колбасного фарша путем перемешивания необходимых по рецептуре ингредиентов, дальнейшего транспортирования и шприцевания его в колбасную оболочку или иную форму. Изобретение может быть также использовано в пищевой, химической, молочной, фармацевтической отраслях промышленности, в медицине, сельском хозяйстве и строительстве для эффективного перемешивания, транспортирования и управляемого вытеснения вязкопластичных материалов. Сущность изобретения: механизм деформации содержит подвижный элемент в виде плиты, соединенный с приводом несколькими кинематическими связями с возможностью их взаимного относительного перемещения. Механизм обеспечивает повышение эффективности работы машин, предназначенных для перемешивания и транспортировки вязкопластичных материалов и расширяет их функциональные возможности. 3 ил.
МЕХАНИЗМ ДЕФОРМАЦИИ ГИБКОГО РАБОЧЕГО ОРГАНА ВИБРАЦИОННО-ВОЛНОВОЙ МАШИНЫ ДЛЯ ПРОИЗВОДСТВА ПИЩЕВЫХ ПРОДУКТОВ, содержащий подвижный элемент в виде плиты, кинематически соединенный с приводом, отличающийся тем, что плита соединена с приводом несколькими кинематическими связями с возможностью их взаимного относительного перемещения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Молочная и мясная промышленность, 1989, N 3, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
