Изобретение относится к геодезическому приборостроению, в именно к радиогеодезическим системам слежения за местоположением контролируемых объектов, и может быть использовано в навигации, например, при аэрофотосъемке с беспилотного летательного аппарата, а также в системах охраны объектов от нападения или несанкционированного проникновения.
Известен ряд систем для определения координат подвижных объектов (1), в которых на подвижных объектах размещают радиоприемники, не менее чем на трех опорных пунктах с известными координатами устанавливают радиопередатчики. Сущность способа, реализуемого данными системами, заключается в том, что непосредственно на подвижном объекте по измерениям разности фаз получают разности расстояний между парами опорных пунктов, а по ним определяют координаты.
Недостаток данного технического решения заключается в том, что обработка и выдача результатов измерений осуществляется на самом подвижном объекте, что не позволяет использовать это техническое решение в системах навигации беспилотных (автоматических) подвижных объектах, а также в системах охранной сигнализации.
Указанный недостаток устранен в способе и устройстве для определения координат подвижных объектов (2), в которых радиопередатчик располагают на подвижном объекте. В районе предполагаемого перемещения объекта равномерно размещена сеть опорных пунктов с ретрансляторами, связанными по каналу связи с центральным пунктом, в котором размещен блок обработки и регистрации.
Известный способ осуществляется следующим образом. После включения радиопередатчика на подвижном объекте излучаемые им радиосигналы принимаются радиоприемниками ретрансляторов, которые, в свою очередь, формируют сигналы, пропорциональные уровню принятого сигнала. Блок обработки центрального пункта по величинам уровней сигналов не менее трех опорных пунктов определяет местоположение подвижного объекта.
К недостаткам данного технического решения следует отнести низкую точность, обусловленную свойствами используемого при обработке параметра радиосигнала его уровень, а также необходимость большой плотности опорных станций.
Сущность предложенного изобретения заключается в возможности оперативного определения местоположения множества подвижных объектов с достижением технического результата, заключающегося в получении высокой точности при одновременном упрощении реализации за счет сокращения числа опорных пунктов.
Указанный технический результат достигается тем, что в способе определения координат подвижных объектов, включающем излучение с помощью сигнального передатчика, размещенного на подвижном объекте, коротких периодических измерительных радиосигналов, прием и обработку этих радиосигналов не менее, чем на трех опорных станциях, передачу по каналу связи на центральную станцию измерительных сигналов от каждой из опорных станций, измерение параметров переданных сигналов и обработку результатов измерений, на центральной станции непрерывно излучают опорный измерительный радиосигнал в виде модулированных синусоидальных колебаний на другой несущей частоте, перед каждым измерительным радиосигналом, излучаемым сигнальным передатчиком, последовательно излучают кодовый управляющий радиосигнал и кодовый адресный радиосигнал, измерительный радиосигнал формируют из двух посылок в виде модулированных синусоидальных колебаний с близкими частотами модуляции, среднее значение которых равно значению частоты модуляции опорного сигнала, передачу кодовых и измерительных сигналов на центральную станцию осуществляют по проводному каналу или по радиоканалу на несущей частоте, отличающейся от несущих частот сигнального передатчика и опорного сигнала, причем передачу посылок измерительного сигнала выполняют с одинаковой частотой модуляции, равной разности частот модуляции соответствующих посылок и опорного радиосигнала, но с разной по знаку фазой, при приеме сигнлов на центральной станции кодовый и измерительный сигналы разделяют на отдельыне каналы, каждый из которых соответствует одной из опорных станций, для каждой из посылок измерительного сигнала измеряют не менее чем две разности фаз между переданными по каналу связи соответствующими посылками измерительных сигналов не менее трех каналов, а при обработке результатов измерений учитывают полуразности полученных значений для обеих посылок измерительного сигнала, при этом для разделения адресного и измерительного сигналов при приеме сигналов на опорных станциях и на центральной станции используют управляющий сигнал.
Описанный способ осуществляется с помощью устройства, содержащего не менее одного сигнального радиопередатчика, устанавливаемого на соответствующем подвижном объекте, не менее трех опорных станций, каждая из которых выполнена с радиоприемной частью, узлом преобразования сигналов и узлом передачи сигналов, центральную станцию, выполненную с узлом приема сигналов, блоком обработки и вычислителем, и канал связи, соединяющий узел передачи каждой из опорных станций с узлом приема сигналов центральной станции.
В данном устройстве центральная станция снабжена передатчиком, выполненным с возможностью непрерывного излучения опорного сигнала в виде модулированных синусоидальных колебаний, каждый из сигнальных передатчиков выполнен с возможностью последовательного излучения кодированного управляющего сигнала, кодированного адресного сигнала и двух измерительных сигналов в виде модулированных синусоидальных колебаний с близкими частотами модуляции, среднее значение которых равно значению частоты модуляции опорного сигнала, узел преобразования сигналов каждой из опорных станций выполнен в виде измерительного канала, кодового канала, переключателя и блока управления, при этом измерительный канал подключен к выходу радиоприемной части и к переключателю и выполнен с возможностью выделения разностной частоты несущих и модулирующих колебаний опорного сигнала и обоих измерительных сигналов, кодовый канал выполнен с возможностью выделения и пропускания кодовых сигналов и подключен к выходу радиоприемной части и через переключатель к входу узла передачи сигналов, блок управления выполнен с возможностью дешифрирования кодового управляющего сигнала и подключен к выходу кодового канала, к управляющему входу измерительного канала и к переключателю, причем блок обработки центральной станции выполнен многоканальным с числом каналов, равным числу опорных станций, а канал связи выполнен в виде проводного канала или радиоканала.
На фиг.1 показана структурная схема сигнального передатчика на подвижном объекте (абонентская станция); на фиг.2а относительные интервалы сигналов, изучаемых сигнальным передатчиком (сигналы тревоги); б относительные интервалы сигналов на опорной станции (ретрансляционной станции); на фиг.3 структурная схема первого варианта опорной станции; на фиг.4 структурная схема второго варианта опорной станции; на фиг.5 структурная схема центральной станции; на фиг.6 относительные интервалы сигналов на центральной станции.
Как и прототип, предлагаемая радиосистема содержит множество абонентских станций с сигнальными передатчиками, сеть (не менее трех) опорных (ретрансляционных) станций и одну центральную станцию, где определяется принадлежность абонентской станции, излучающей сигналы тревоги, и местонахождение (координаты) станции. Координаты станции определяются разностно-дальномерным способом не менее, чем по двум разностям расстояний между абонентской и ретрансляционными станциями.
На фиг.1 обозначено: 1 формирователь модулирующего сигнала (сигнала тревоги) станции, 2 ЧМ-генератор, 3 усилитель мощности станции, 4 антенна станции.
Сигнал тревоги, формируемый формирователем 1, состоит из двух кодированных и двух измерительных посылок, последовательность которых указана на фиг. 2. Первой кодированной посылкой 5 является управляющий сигнал (пилот-сигнал), необходимый для фиксирования момента начала обработки принятых сигналов на опорных ретрансляционных и центральной станциях; передача управляющего сигнала в виде кодированной посылки вызвана необходимостью обеспечения высокой помехозащищенности ее. Вторая кодировання посылка 6 является адресной, по ней на центральной станции определяется характер сигнала тревоги (например, "несанкционированное проникновение в охраняемое помещение", "разбойное нападение", "угон автомашины", "пожар в помещении", "вызов скорой медицинской помощи" и др.) и принадлежность источника сигнала. Измерительными посылками 7 и 8 являются синусоидальные колебания с разной частотой, отличающиеся на малую величину от ее среднего значения (например, частоты модулирующих колебаний измерительных посылок составляют 9,5 и 10,1 кГц, среднее значение частоты здесь равно 10 кГц, обе частоты отличаются от среднего значения на 0,5 кГц).
Рассмотренным выше сигналом тревоги модулируется генератор 2 станции, причем здесь может быть использована как амплитудная, так и частотная модуляция. Данная охранная система здесь и далее рассматривается применительно к использованию частотной модуляции как более предпочтительной. Модулированный сигнал тревоги усиливается усилителем мощности 3 и излучается антенной 4.
В качестве измерительного сигнала помимо указанных выше двух посылок используется еще опорный сигнал, излучаемый передатчиком центральной станции. Этот сигнал представляет собой непрерывные колебания на несущей частоте, отличной от несущей частоты абонентской станции на указанную ниже величину, модулированные синусоидальными колебаниями с частотой, равной средней частоте измерительных посылок абонентской станции (по указанному выше примеру она составляет 10 кГц).
На представленной на фиг.3 структурной схеме опорной ретрансляционной станции обозначено: радиоприемная часть 11, измерительный канала 12, кодовый канал 13, переключатель 14 каналов, болк 15 управления, узел 16 передачи сигналов, приемная 17 и передающая 18 антенны.
На вход радиоприемной части 11 попадают два сигнала сигнал тревоги от абонентской станции и опорный измерительный сигнал от центральной станции. Оба сигнала усиливаются усилителем высокой частоты (УВЧ) 19 и переселектором 20, далее с помощью смесителя 21, гетеродина 22 и УПЧ-1 23 происходит снижение частоты обоих сигналов до значения, удобного для дальнейшей обработки сигналов. Оба сигнала затем попадают на два входа на вход измерительного канала 12 и кодового канала 13.
Измерительный канал 12 содержит смеситель 24, усилитель промежуточной частоты (УПЧ-2) 25, амплитудный детектор 26, узкополосный усилитель 27 низкой частоты (УНЧ) и вспомогательный ЧМ-генератор 28. УПЧ-2 содержит управляющий вход, обеспечивающий возможность отпирания постоянно запертого измерительного канала подачей на него соответствующего импульса.
Смеситель 24 не имеет отдельного гетеродина, а роль гетеродинного сигнала играет опорный сигнал, и поэтому разность частот несущих колебаний сигналов тревоги и опорного сигнала выбирают равной промежуточной частоте приемника в измерительном канале. Но этот гетеродинный сигнал в измерительном канале имеет необычную особенность, состоящую в том, что он промодулирован по частоте. Поэтому необходимо рассмотреть характер сигнала на выходе смесителя 24 при таком гетеродинном сигнале. Следует при этом учитывать, что измерительный канал постоянно заперт и отпирается управляющим импульсом только на время действия двух измерительных посылок 7 и 8.
Итак пусть на вход смесителя действуют два частотно-модулированных колебания первая измерительная посылка сигнала тревоги и опорный сигнал
lA1 εA1 cos [ωAt + mA1 sin(ΩA1t +
+ ΦA1) + ϕA]
lo εocos [ωot + mosin(Ωot + Φo) + ϕo]
lвx lA + lo, где индекс А относится к сигналу абонентской станции, а индекс "0" к опорному сигналу.
Рассмотрим сигнал на выходе УПЧ-2 25 при следующих соблюдающихся в измерительном канале условиях:
ωA ωo ωпр, где ωпр промежуточная частота измерительного канала приемника;
ΩA1 Ωo Ωo ΩA2 ΔΩ, где ΩA1 и ΩA2 модулирующая частота соответственно первой и второй измерительных посылок
ΔΩ ≪ 
Δω > ΔΩ, Δω < ΩA1, ΩA2, где 2Δω ширина полосы пропускания УПЧ-2.
Ток в смесителе iс в зависимости от напряжения на его входе пусть имеет квадратичный характер:
ic alвx2. Находим ток смесителя частоты ωпр ωA ωo для первой измерительной посылки ic=aεΑ1εξcos[ωпрt+mA1sin(ΩA1t+ΦA1)-mosin(Ωot+Φo)+(ϕA-ϕo)]aεA1εо{ cos[ωпрt+(ϕΑ-ϕξ)]cos[mΑ1sin(ΩΑ1t+ΦΑ1)]cos[mξsin(Ωξt+Φξ)]+ +cos[ωпрt+(ϕA-ϕo)] sin[mA1sin(ΩA1t+ΦA1)]˙sin[mosin(Ωot+Φo)]+sin[ωпрt+ +(ϕA-ϕo)] cos[mA1sin(ΩA1t+ΦA1)]sin[mоsin(Ωоt+Φo)] -sin[ωпрt+(ϕA-ϕo)] sin[mA1sin(ΩA1t+ΦA1)]cos[mosin(Ωot+Φo)]
Дальнейший анализ будем вести только для малых индексов модуляции, т.е. при mА1 < 1 и mо < 1. В этом случае можно принять
cos[mA1sin(ΩA1t+ΦA1)]  1; cos[mosin(Ωot+Φo)]
1; cos[mosin(Ωot+Φo)]  1;
1;
sin[mA1sin(ΩA1t+ΦA1)]  mAsin(ΩA1t+ΦA1);
mAsin(ΩA1t+ΦA1);
sin[mosin(Ωot+Φo)]  mosin(Ωot+Φo).
mosin(Ωot+Φo).
Тогда выражение для тока смесителя получает вид:
ic=aεAεocos t+(ϕA-ϕo)
t+(ϕA-ϕo) 1 +
1 +  mA1mocos[(ΩA1-Ωo)t+(ΦA1-Φo)]
mA1mocos[(ΩA1-Ωo)t+(ΦA1-Φo)] mAmocos[(ΩA1+Ωo)t+(ΦA1+Φo)]
mAmocos[(ΩA1+Ωo)t+(ΦA1+Φo)] +
+
+ aεAεosin[ωпрt+(ϕA-ϕo)] mosin(Ωot+Φo)-mA1sin(ΩA1t+ΦA1)
mosin(Ωot+Φo)-mA1sin(ΩA1t+ΦA1)
Из полученного результата видно, что модулирующие колебания тока смесителя содержат составляющие частоты Ωo, ΩA1, ΩA1 + Ωo и ΩA1 Ωo. Так как согласно условию полоса пропускания УПЧ-2 Δω < ΩA1 и Ωo и Δω > ΔΩ, то напряжение на выходе УПЧ-2 оказывается равным:
lc1= 1 +
1 +  mA1mocos[ΔΩt+(ΦA1-Φo)]
mA1mocos[ΔΩt+(ΦA1-Φo)] cos[ωпрt+(ϕA-ϕo)]
cos[ωпрt+(ϕA-ϕo)]
В результате оказывается, что напряжение на выходе УПЧ-2 представляет собой амплитудно-модулированный сигнал с низкой частотой синусоидальной модуляции, равной ΔΩ ΩA1 Ωo. Коэффициент модуляции оказывается равным M  mAmo. Аналогичный результат получается для второй измерительной посылки, но с противоположной фазой модулирующего сигнала
mAmo. Аналогичный результат получается для второй измерительной посылки, но с противоположной фазой модулирующего сигнала
lc2= 1 +
1 +  mA2mocos[ΔΩt-(ΦA2-Φo)]
mA2mocos[ΔΩt-(ΦA2-Φo)] cos[ωпрt+(ϕA-ϕo)]
cos[ωпрt+(ϕA-ϕo)]
Анализ показывает, что, если в модулирующих колебаниях измерительных посылок и опорного сигнала используются большие индексы модуляции, то на выходе смесителя также возникают амплитудно-модулированные колебания, но в них образуются гармонические составляющие, т.е. в модуляции возникают искажения. Так как модулирующие колебания являются измерительными, то при возникновении искажений в них может возникнуть из-за этого погрешность в измерениях. Поэтому в измерительных посылках и в опорном сигнале должны использоваться только малые индексы модуляции.
Анализ также показывает, что, если в измерительных посылках и в опорном сигнале использовать амплитудную модуляцию, то сигнал на выходе УПЧ-2 также будет амплитудно-модулированным с коэффициентом модуляции M  MAMo, где МА и Мо коэффициент амплитудной модуляции измерительных посылок и опорного сигнала.
MAMo, где МА и Мо коэффициент амплитудной модуляции измерительных посылок и опорного сигнала.
Полученный результат можно обобщенно сформулировать так.
Если на вход смесителя приемника без отдельного гетеродина действуют два модулированных по частоте или амплитуде сигнала, то при указанных выше условиях на выходе УПЧ возникает амплитудно-модулированный сигнал, мгновенная фаза модулирующих колебаний которого оказывается равной разности мгновенных фаз модулирующих колебаний обоих входных сигналов.
Таким образом, в результате совместного действия на входе смесителя 24 измерительного канала 12 двух измерительных посылок сигнала тревоги и опорного измерительного сигнала на выходе УПЧ-2 25 образуются две амплитудно-модулированные посылки с низкой и одинаковой частотой модулирующих колебаний, но с разной по знаку фазой колебаний. Напряжение с выхода УПЧ-2 детектируется амплитудным детектором 26, усиливается далее узкополосным усилителем 27 низкой частоты; полученными колебаниями модулируют по частоте вспомогательный генератор 28, выход которого подключен к переключателю 14 каналов.
С выхода УПЧ-1 23 радиоприемной части 11 напряжение подается также на кодовый канал 13, содержащий смеситель 29, гетеродин 30 и резонансный усилитель 31, с помощью которых частота колебаний кодового канала снижается до значения, равного частоте вспомогательного генератора 28 с одновременной фильтрацией опорного сигнала. Выход усилителя 31 подключен к другому входу переключателя 14 и к входу блока 15 управления.
Блок 15 управления содержит ограничитель 32, частотный детектор 33 и дешифратор управляющего сигнала (пилот-сигнала) 34, выход которого соединен с формирователем 35 сигнала управления работой переключателя каналов. В результате дешифрирования пилот-сигнала на выходе дешифратора 34 образуется импульс 9 напряжения (фиг.2а), от действия которого в формирователе возникает импульс 10 управления (фиг.2а) определенной длительности, задержанный относительно импульса с выхода дешифратора на время действия адресной посылки кодированной части сигнала; длительность действия импульса 10 управления должна быть равна длительности обеих измерительных посылок.
Переключатель 14 каналов постоянно открыт для прохождения сигнала с кодового канала 13 и закрыт для прохождения сигнала с измерительного канала 12. Лишь на время действия измерительных посылок происходит переключение каналов кодовый канал 13 запирается, а измерительный канал 12 отпирается. В результате на узел 16 передачи сигналов для дальнейшего прохождения попадает кодовая часть сигнала без изменения, а измерительная часть с указанным преобразованием модулирующей частоты. Для большей надежности указанных переключений сигналов целесообразно измерительный канал 12 выполнить постоянно запертым и отпирать его указанным управляющим импульсом на время действия измерительной части сигнала. Узел 16 передачи сигналов содержит смеситель 36, на вход которого поступает сигнал с выхода переключателя 14 и гетеродинный сигнал с гетеродина 30, резонансный усилитель 37, смеситель 38, гетеродин 39, резонансный усилитель 40, усилитель 41 мощности. Структурная схема составлена применительно к использованию частотной модуляции сигнала. Элементы 36-41 передатчика используются для обеспечения заданной частоты несущих колебаний (которая должна существенно отличаться от несущей частоты абонентской станции) и необходимой мощности излучаемого сигнала.
Две антенны 17 и 18 принципиально могут быть заменены одной антенной с использованием дуплексера, если частоты приема и передачи достаточно близки.
На фиг.4 представлена структурная схема второго варианта построения ретрансляционной станции. В этом варианте вспомогательный ЧМ-генератор 28 включен не в измерительный канал 12, как в варианте на фиг.3, а в узел 16 передачи сигналов; на вход переключателя 14 подводится напряжение непосредственно с выхода усилителя 27, а на другой вход дешифрированный кодовый пилот-сигнал с выхода кодового канала 13, который дополнительно снабжен ограничителем 32 и частотным детектором 33. Блок 15 управления снабжен дешифратором 34 пилот-сигнала, вход которого соединен с выходом частотного детектора 33, а выход с формирователем 35 сигнала управления. Блок 15 управления снабжен, кроме того, амплитудным детектором 42, который детектирует сигнал тревоги с выхода усилителя 31, и формирователем 43 импульсов. В этом варианте узел 16 передачи сигналов постоянно заперт и отпирается импульсом с выхода формирователя 43 импульсов на время действия сигнала тревоги.
Существует также третий вариант построения опорной ретрансляционной станции, в котором для передачи сигналов на центральную станцию используется кабельный (проводной) канал вместо радиоканала (не показано). В этом случае отпадает необходимость в использовании элементов узла 16 передачи сигналов, а также передающей антенны 18.
На фиг. 5 на изображенной структурной схеме передатчика 44 центральной станции, излучающего опорный измерительный сигнал, обозначено: 45 модулирующий синусоидальный генератор опорной частоты (согласно примеру равной 10 кГц), 46 ЧМ-генератор, 47 смеситель, 48 гетеродин, 49 резонансный усилитель, 50 усилитель мощности, 51 передающая антенна. Здесь так же, как и в абонентской станции, структурная схема передатчика составлена применительно к использованию частотной модуляции сигнала. Элементы 47-50 передатчика используются для обеспечения заданной частоты несущих колебаний и необходимой мощности излучаемого сигнала.
На центральной станции все поступившие сигналы от ретрансляционных станций принимаются антенной 52 узла 53 приема сигналов, содержащего усилитель 54 высокой частоты, преселектор 55, смеситель 56, гетеродин 57 и УПЧ-1 58 и далее разделяются на отдельные каналы преобразования, собранные в блок 59. Число каналов равно числу опорных ретрансляционных станций. Каждый канал содержит смеситель 60, гетеродин 61, УПЧ-2 62, ограничитель 63, ЧМ-детектор 64, усилитель 65 низкой частоты кодированного сигнала, узкополосный усилитель 66 низкой частоты измерительного сигнала, дешифратор 67 пилот-сигнала, формирователь 68 импульсов управления посылками сигналов тревоги. Станция содержит также многоканальный блок 69 обработки сигналов (в дальнейшем также микропроцессорное устройство) и вычислитель 70 (в дальнейшем также компьютер). Элементы 60-62 служат для обеспечения селекции сигналов от разных ретрансляционных станций.
В случае использования проводного канала для связи ретрансляционных станций с центральной станцией отпадает необходимость в использовании элементов 54-66 станции, а также приемной антенны 52.
Вход дешифратора 67 пилот-сигнала соединен с выходом ЧМ-детектора 64, а его выход с формирователем 68 импульсов управления. В результате дешифрирования пилот-сигнала на выходе дешифратора 67 образуется импульс напряжения, от действия которого возникают импульсы управления посылками сигнала тревоги, а именно импульс, отпирающий постоянно запертый усилитель 65 низкой частоты кодированного сигнала на время действия адресной посылки кодового сигнала и отдельно два других импульса для отпирания постоянного запертого узкополосного усилителя 66 низкой частоты измерительного сигнала во время действия каждой измерительной посылки в стационарном состоянии.
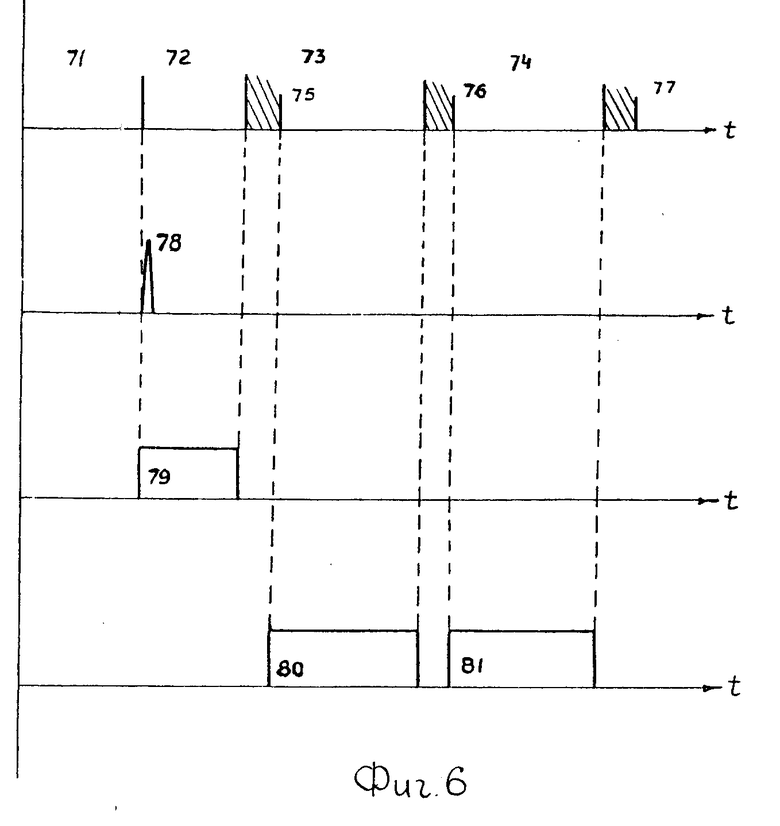
На фиг.6 приведены относительные интервалы действия посылок сигнала тревоги и управляющих импульсов, где обозначено: 71 интервал кодового пилот-сигнала; 72 интервал кодового адресного сигнала; 73 и 74 интервалы измерительных посылок; 75-77 интервалы нестационарных процессов на выходе узкополосного УНЧ измерительного сигнала 66; 78 импульс на выходе дешифратора 67; 79 импульс, отпирающий усилитель 66; 80 и 81 импульсы, отпирающие усилитель 66.
Адресные кодированные посылки с выхода УНЧ направляются на компьютер 70 для установления принадлежности сигнала тревоги с использованием банка данных, а измерительные посылки в виде пар стационарных синусоидальных колебаний на микропроцессорное устройство 64 для определения разностей фаз между синусоидальными сигналами, полученными не менее, чем от трех ретрансляционных станций от одного и того же источника сигнала тревоги. Результаты определения разностей фаз направляются на компьютер для вычисления по ним координат источника сигнала тревоги. Связь указанных разностей фаз и разностей расстояний между источником сигнала тревоги и тремя разными ретрансляционными станциями можно установить из анализа фазовых соотношений в системе.
Рассмотрим фазовые соотношения в системе.
При изучении этого вопроса будем использовать угловые частоты сигналов, но в излагаемом тексте слово угловые для простоты записи будем опускать.
Мгновенная фаза модулирующих колебаний первой измерительной посылки сигнала тревоги в точке излучения будет равна
ηA1(t) ΩA1t + ΦA1 (Ωo + ΔΩ)t + ΦA1, где ΩА1 частота модулирующих колебаний первой измерительной посылки;
Ωо частота модулирующих колебаний опорного сигнала; ΔΩ= ΩА1 Ωо;
ΦА1 начальная фаза колебаний.
Мгновенные фазы этих колебаний в точках приема трех ретрансляционных станций I, II, III будут равны.
ηA1(t-τI)=(Ωo+ΔΩ)(t-τI)+ΦA1=(Ωo+ΔΩ)t+ΦA1-(Ωo+ΔΩ) ,
,
ηA1(t-τII)=(Ωo+ΔΩ)t-(Ωo+ΔΩ) + ΦA1,
+ ΦA1,
ηA1(t-τIII)= (Ωo+ΔΩ)t-(Ωo+ΔΩ) + ΦA1, где rI, rII, rIII расстояние между точкой излучения сигнала тревоги и точкой приема соответствующей ретрансляционной станции;
+ ΦA1, где rI, rII, rIII расстояние между точкой излучения сигнала тревоги и точкой приема соответствующей ретрансляционной станции;
τl, τll, τlll время прохождения радиоволнами этих расстояний;
V скорость распространения радиоволн.
Мгновенная фаза модулирующих колебаний опорного сигнала в точке излучения центральной станции равна
ηo(t) Ωot + Φo, где Φo начальная фаза колебаний.
Мгновенные фазы этих колебаний в точках приема трех указанных ретрансляционных станций будут равны
ηo(t-τoI)=Ωot+Φo- ,
,
ηo(t-τoII)=Ωot+Φo- ,
,
ηo(t-τoIII)=Ωot+Φo- . Здесь roI, roII, roIII расстояние между точкой излучения центральной станции и точкой приема соответствующей ретрансляционной станции; τoI, τoII, τoIII время прохождения радиоволнами между этих расстояний.
. Здесь roI, roII, roIII расстояние между точкой излучения центральной станции и точкой приема соответствующей ретрансляционной станции; τoI, τoII, τoIII время прохождения радиоволнами между этих расстояний.
Сигнал тревоги и опорный измерительный сигнал попадают на вход приемников ретрансляционных станций. Учитывая весьма большую широкополосность входной высокочастотной части приемников по сравнению с модулирующей частотой измерительных посылок и опорного сигнала, можно пренебречь фазовыми задержками модулирующих колебаний, возникающими в этих цепях приемника. Тогда на выходе смесителей измерительных каналов ретрансляционных станций мгновенные фазы модулирующих колебаний на частоте ΔΩ будут равны
ΔηI ηA1(t τI) ηo(t τoI),
ΔηII ηA1(t τII) ηo(t τoII),
ΔηIII ηA1(t τIII) ηo(t τoIII),
Мгновенные фазы этих же колебаний на выходе узкополосного УНЧ центральной станции 60 будут равны = ηA1(t-τI)-ηo(t-τoI)+δ1=(Ωo+ΔΩ)t+
= ηA1(t-τI)-ηo(t-τoI)+δ1=(Ωo+ΔΩ)t+
+ ΦA1-(Ωo+ΔΩ)
 t+Φo-
t+Φo- +δ1=
+δ1=
ΔΩt+(ΦA1-Φo)-(Ωo+ΔΩ) +
+  +δ1,
+δ1, = ΔΩt+(ΦA1-Φo)-(Ωo+ΔΩ)
= ΔΩt+(ΦA1-Φo)-(Ωo+ΔΩ) +
+  + δ2,
+ δ2, = ΔΩt+(ΦA1-Φo)-(Ωo+ΔΩ)
= ΔΩt+(ΦA1-Φo)-(Ωo+ΔΩ) +
+  + δ3 где δ1, δ2, δ3- сумарные фазовые задержки модулирующего сигнала частоты ΔΩ, возникающие в цепях измерительного канала приемников ретрансляционных станций, при распространении радиоволн между ретрансляционной и центральной стацниями и в цепях приемника центральной станции.
+ δ3 где δ1, δ2, δ3- сумарные фазовые задержки модулирующего сигнала частоты ΔΩ, возникающие в цепях измерительного канала приемников ретрансляционных станций, при распространении радиоволн между ретрансляционной и центральной стацниями и в цепях приемника центральной станции.
Первые предварительные исходные данные для вычисления координат источника сигнала тревоги являются любые две разности полученных мгновенных фаз -
- = (Ωo+ΔΩ)
= (Ωo+ΔΩ) +
+  + (δ1-δ2),
+ (δ1-δ2), -
- = (Ωo+ΔΩ)
= (Ωo+ΔΩ) +
+  + (δ1-δ3).
+ (δ1-δ3).
Рассмотрим теперь фазовые соотношения в системе при прохождении второй измерительной посылки.
При действии второй измерительной посылки мгновенная фаза модулирующих колебаний сигнала тревоги в точке излучения равна
ηA2(t) ΩA2t + ΦA2 (Ωo ΔΩ)t + ΦA2, где ΦА2 начальная фаза колебаний.
Мгновенные фазы этих колебаний в точках приема тех же трех ретрансляционных станций будут равны
ηA2(t-τI) (Ωo-ΔΩ)t+ΦA2-(Ωo-ΔΩ) ,
,
ηA2(t-τII) (Ωo-ΔΩ)t+ΦA2-(Ωo-ΔΩ) ,
,
ηA2(t-τIII) (Ωo-ΔΩ)t+ΦA2-(Ωo-ΔΩ) .
.
Действуя теперь так же, как и выше, получим мгновенные фазы модулирующих колебаний частоты ΔΩ на выходе узкополосного УНЧ центральной станции. Для этого случая = ΔΩt+(Φo-ΦA2)+(Ωo-ΔΩ)
= ΔΩt+(Φo-ΦA2)+(Ωo-ΔΩ)
 + δ1,
+ δ1, = ΔΩt+(Φo-ΦA2)+(Ωo-ΔΩ)
= ΔΩt+(Φo-ΦA2)+(Ωo-ΔΩ)
 + δ2,
+ δ2, = ΔΩt+(Φo-ΦA2)+(Ωo-ΔΩ)
= ΔΩt+(Φo-ΦA2)+(Ωo-ΔΩ)
 + δ3.
+ δ3.
Вторые предварительные исходные данные для вычисления координат источника сигнала тревоги являются такие же две разности полученных мгновенных фаз -
- = -(Ωo-ΔΩ)
= -(Ωo-ΔΩ)
 + (δ1-δ2),
+ (δ1-δ2), -
- = -(Ωo-ΔΩ)
= -(Ωo-ΔΩ)
 + (δ1-δ3).
+ (δ1-δ3).
Окончательными исходными данными для вычисления координат источника сигнала тревоги являются полуразности полученных предварительных исходных данных




 ,
,





 , которые оказались свободными от неизвестных фазовых задержек в цепях приемников системы.
, которые оказались свободными от неизвестных фазовых задержек в цепях приемников системы.
Значения 

 известны и могут быть предварительно введены в компьютер. Поэтому вторые члены в полученных результатах могут быть заранее вычислены и из результатов отброшены.
известны и могут быть предварительно введены в компьютер. Поэтому вторые члены в полученных результатах могут быть заранее вычислены и из результатов отброшены.
Таким образом можно принять, что результат измерений равен
Ψ1=  Ψ2=
Ψ2=  . Искомые разности расстояний оказываются равными
. Искомые разности расстояний оказываются равными
rII-rI Ψ1, rIII-rI
Ψ1, rIII-rI Ψ2.
Ψ2.
Таким образом при излучении подвижным источником сигнала тревоги на выходе не менее трех каналов на центральной станции возникают три одинаковых кодированных адресных сигнала, по которым с помощью компьютера определяется характер и принадлежность источника сигнала тревоги. Далее по первой измерительной посылке в трех каналах с помощью микропроцессорного устройства определяют первый предварительный результат измерения разности фаз, который в нем запоминается. Затем по второй измерительной посылке определяется второй предварительный результат измерений. После этого в микропроцессорном устройстве вычисляется полуразность обоих предварительных результатов измерений разностей фаз и полученные данные направляются в компьютер для вычисления по ней координаты источника сигнала тревоги.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2047839C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2106694C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОИСКА И СПАСЕНИЯ ПРИ БЕДСТВИЯХ НА МОРЕ | 1997 |
|
RU2117959C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СТОРОННИМ ПОДСВЕТОМ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2013 |
|
RU2563872C2 |
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2011 |
|
RU2465733C1 |
| СПОСОБ РАННЕГО ОБНАРУЖЕНИЯ ПОЖАРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2533299C2 |
| ИЗМЕРИТЕЛЬ ФАЗ ОСЦИЛЛОГРАФИЧЕСКИЙ | 2005 |
|
RU2314543C2 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ОБЪЕКТОВ НЕДВИЖИМОСТИ, ТРАНСПОРТНЫХ СРЕДСТВ, ЛЮДЕЙ И ЖИВОТНЫХ | 2003 |
|
RU2216463C1 |
| ЭКОЛОГИЧЕСКАЯ СИСТЕМА СБОРА ИНФОРМАЦИИ О СОСТОЯНИИ РЕГИОНА | 2011 |
|
RU2474882C1 |


Использование: радиофизические системы слежения за местоположением контролируемых объектов, навигация, аэрофотосъемка, системы охраны объектов от нападения и несанкционированного проникновения. Сущность изобретения: на объектах, подлежащих контролю, размещают сигнальные радиопередатчики, кодовые и измерительные сигналы от которых могут быть приняты не менее, чем на трех опорных станциях, которые также принимают опорный радиосигнал, излучаемый с центральной станции. По результатам обработки опорного и измерительного сигналов определяется местоположения объекта, а с учетом кодового сигнала контролируется ситуация на объекте. 2 с.п. ф-лы, 6 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ПОЛУЧЕНИЯ СОКА ИЗ РАСТИТЕЛЬНОГО СЫРЬЯ | 2002 |
|
RU2218835C1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
