Изобретение относится к геофизическому приборостроению, а именно к радиогеодезическим системам слежения за местоположением контролируемых объектов, и может быть использовано в навигации, например, при аэрофотосъмке с беспилотного летательного аппарата, а также в системах охраны объектов от нападения или несанкционированного проникновения.
Известен ряд систем для определения координат подвижных объектов [1] [2] в которых на подвижных объектах размещают радиоприемники, на не менее, чем на трех опорных пунктах с известными координатами устанавливают радиопередатчики. Сущность способа, реализуемого этими системами, заключается в том, что непосредственно на подвижном объекте по измерениям разности фаз получают разности расстояний между парами опорных пунктов, а по ним определяют координаты.
Недостаток указанного технического решения заключается в том, что обработка и выдача результатов измерений осуществляется на самом подвижном объекте, что не позволяет использовать это техническое решение в системах навигации беспилотных (автоматических) подвижных объектах, а также в системах охранной сигнализации.
Указанный недостаток устранен в способе и устройстве для определения координат подвижных объектов [3] в которых радиопередатчик располагают на подвижном объекте. В районе предлагаемого перемещения объекта равномерно размещена сеть базисных станций, связанных по каналу связи с центральной станцией, в которой размещен блок обработки и регистрации.
Известный способ осуществляется следующим образом. После включения радиопередатчика на подвижном объекте изучаемые им радиосигналы принимаются радиоприемниками базисных станций, которые, в свою очередь, формируют сигналы, пропорциональные уровню принятого сигнала. Блок обработки центральной станции по величинам уровней сигналов не менее трех базисных станций определяет местoположение подвижного объекта.
К недостаткам этого технического решения следует отнести низкую точность, обусловленную свойствами используемого при обработке параметра радиосигнала его уровня, а также необходимость большой плотности базисных станций.
Сущность предложенного изобретения заключается в возможности оперативного определения местоположения множества подвижных объектов с достижением технического результата, заключающегося в получении высокой точности при одновременном упрощении реализации за счет сокращения числа базисных станций.
Указанный технический результат достигается тем, что в способе определения координат подвижных объектов, включающем излучение с помощью сигнального передатчика, размещенного на подвижном объекте, коротких периодических измерительных радиосигналов, прием и обработку этих радиосигналов на не менее, чем трех базисных станций, размещенных в точках с известными координатами, передачу по каналу связи на центральную станцию измерительных сигналов от каждой из базисных станций, измерение параметров переданных сигналов и обработку результатов измерений, на опорной станции, размещенной в точке с известными координатами, в том числе в космическом носителе, запущенном на геостационарную орбиту, непрерывно излучают опорный измерительный радиосигнал в виде модулированных синусоидальных колебаний на другой несущей частоте, перед каждым измерительным радиосигналом, излучаемым сигнальным передатчиком, последовательно излучают кодовый управляющий радиосигнал и кодовый адресный радиосигнал, измерительный радиосигнал формируют из двух посылок в виде модулированных синусоидальных колебаний с близкими частотами модуляции, среднее значение которых равно значению частоты модуляции опорного сигнала, передачу кодовых сигналов и измерительных сигналов в цифровом виде на центральную станцию осуществляют по проводному каналу или по световодному каналу, или по радиоканалу на несущей частоте, не равной несущим частотам сигнального передатчика и опорного сигнала, или по комбинированному каналу, причем передачу посылок измерительного сигнала выполняют с одинаковой частотой модуляции, равной разности частот модуляции соответствующих посылок и опорного радиосигнала, при цифровой передаче измерительных сигналов для обеих измерительных посылок определяют интервалы времени от выбранного начала отсчетов до моментов прохождения синусоид через нуль и либо определяют полуразность значений этих интервалов для каждой пары посылок и результаты в цифровом виде направляют по каналу связи на центральную станцию, либо оба результата определения интервалов времени для каждой пары измерительных посылок направляют в цифровом виде на центральную станцию, где производят определение полуразности значения интервалов и определяют разность результатов, полученных не менее, чем трех каналов связи от одного и того же сигнального радиопередатчика, при этом для обеспечения необходимой последовательности передачи с оазисной станции кодового и преобразованного измерительного сигнала используют управляющий сигнал.
Описанный способ осуществляется с помощью устройства, содержащего не менее одного сигнального радиопередатчика (абонентского сигнализатора), устанавливаемого на соответствующем подвижном объекте, не менее трех базисных станций, выполненных каждая с радиоприемной частью, узлом преобразования сигналов, узлом передачи сигналов, не менее одной центральной станции, выполненной с узлом приема сигналов, блоком обработки с вычислителем и канал связи, соединяющий базисные и центральную станции, в котором согласно изобретению в точке с известными координатами устанавливается опорная станция, выполненная с возможностью непрерывного излучения опорного сигнала в виде непрерывных модулированных синусоидальных колебаний, каждый из сигнальных радиопередатчиков выполнен с возможностью последовательного излучения кодированного управляющего сигнала, кодированного адресного сигнала, и двух измерительных сигналов в виде модулированных синусоидальных колебаний с близкими частотами модуляции, среднее значение которых равно значению частоты модуляции опорного сигнала, узел преобразования сигналов каждой из базисных станций выполнен в виде измерительного канала, кодового канала, блока управления каналов и блока цифровой обработки измерительной информации, измерительный канал выполнен с возможностью выделения разностной частоты несущих и модулирующих колебаний опорного сигнала и обоих измерительных сигналов и подключен к выходу радиоприемной части, кодовый канал выполнен с возможностью выделения и пропускания кодовых сигналов и подключен к выходу радиоприемной части, блок управления каналов выполнен с дешифратором управляющего кодового сигнала, подключенного к выходу кодового канала, с формирователем сигнала управления переключением каналов и с ключевыми схемами, подключенными к выходам измерительного и кодового каналов, блок цифровой обработки измерительной информации выполнен на основе микроконтроллера с возможностью цифрового определения интервалов между выбранным началом отсчета и моментами прохождения синусоид через нуль и предварительной обработки этих результатов, пропускания без изменения адресного кодового сигнала, и подключенного к выходам ключевых схем измерительного и кодового каналов, выходной блок выполнен с возможностью передачи через линию связи адресной кодовой и цифровой измерительной информации и подключен к выходу блока цифровой обработки информации, причем центральная станция выполнена с многоканальным входом с числом каналов равным числу базисных станций, с блоком контроллеров сбора и предварительной обработки информации, с главным компьютером с базой данных и с подключенными к нему терминальных компьютеров пользователей, а канал связи выполнен в виде проводного канала, или световодного канала, или радиоканала, или комбинированного канала.
Сущность изобретения поясняется описанием, в варианте применительно к его использованию в системах охраны подвижных объектов (автотранспорта, милицейских постов, отдельных граждан).
На фиг. 1 изображена структурная схема сигнального передатчика на подвижном объекте; на фиг. 2 относительные интервалы сигналов, излучаемых сигнальным передатчиком; на фиг. 3 структурная схема базисной станции; на фиг. 4 относительные интервалы сигналов на базисной станции; на фиг. 5 структурная схема опорного передатчика; на фиг. 6 структурная схема центральной станции.
Как и у прототипа, предлагаемая радиосистема содержит множество абонентских станций с сигнальными передатчиками, сеть (не менее трех) базисных станций и не менее одной центральной станции, где определяется принадлежность абонентской станции, излучающей сигналы тревоги, и местонахождение (координаты) станции. Координаты станции определяются разностно-дальномерным способом не менее, чем по двум разностям расстояний между абонентской и ретрансляционными станциями.
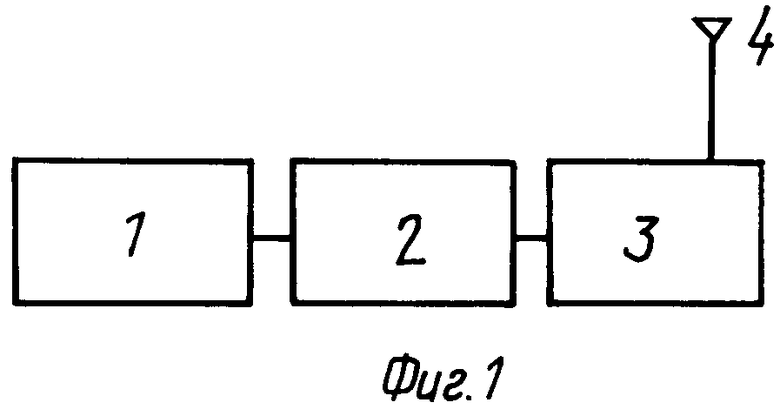
На фиг. 1 обозначено: 1 формирователь модулирующего сигнала (сигнала тревоги) станции, 2 ЧМ-генератор, 3 усилитель мощности станции, 4 антенна станции.
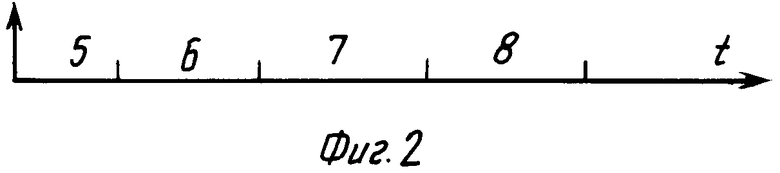
Сигнал тревоги, формируемый формирователем 1, состоит из двух кодированных и двух измерительных посылок, последовательность которых указана на фиг. 2. Первой кодированной посылкой 5 является управляющий сигнал, необходимый для фиксирования момента начала обработки принятых сигналов на базисных станциях; передача управляющего сигнала в виде кодированной посылки вызвана необходимостью обеспечения высокой помехозащищенности ее. Вторая кодированная посылка 6 является адресной, по ней на центральной станции определяется характер сигнала тревоги (например, "несанкционированное проникновение в охраняемое помещение", "разбойное нападение", "угон автомашины", "пожар в помещении", "вызов скорой медицинской помощи" и др.) и принадлежность источника сигнала. Измерительными посылками 7 и 8 являются синусоидальные колебания с разной частотой, отличающиеся на малую величину от ее среднего значения (например, частоты модулирующих колебаний измерительных посылок составляют 9,5 и 10,5 кГц, среднее значение частоты здесь равно 10 кГц, обе частоты отличаются от среднего значения на 0,5 кГц).
Рассмотренным выше сигналом тревоги модулируется генератор 2 станции, причем здесь может быть использована как амплитудная, так и частотная модуляция. Данная система здесь и далее рассматривается применительно к использованию частотой модуляции, как более предпочтительной.
Модулированный сигнал тревоги усиливается усилителем мощности 3 и излучается антенной 4.
В качестве измерительного сигнала помимо указанных выше двух посылок используется еще опорный сигнал, излучаемый опорным передатчиком. Этот сигнал представляет собой непрерывное колебание на несущей частоте, отличной от несущей частоты абонентской станции на указанную ниже величину, модулированной синусоидальными колебаниями с частотой, равной средней частоте измерительных посылок абонентской станции (по указанному выше примеру она составляет 10 кГц).
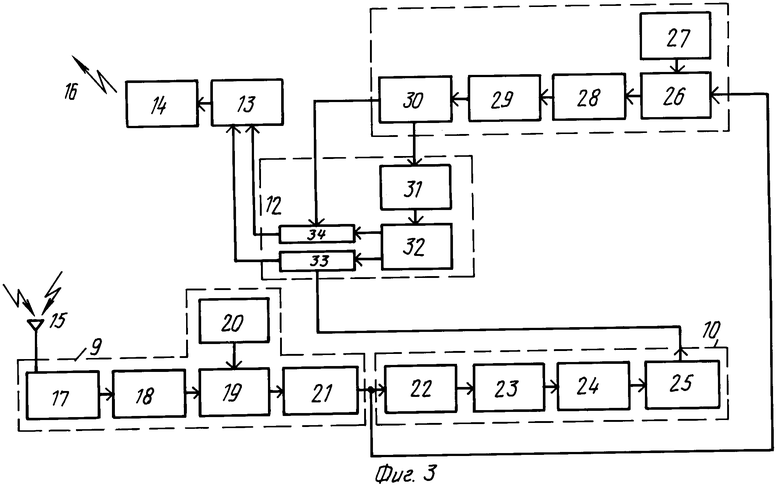
На представленной на фиг. 3 структурной схеме базисной станции обозначено: радиоприемная часть 9, измерительный канал 10, кодовый канал 11, блок управления каналов 12, блок цифровой обработки измерительной информации (микроконтроллер) 13, блок передачи информации (выходной блок) 14, приемная антенна 15, линия связи с центральной станцией 16.
На вход радиоприемной части 9 попадают два сигнала сигнал тревоги от абонентской станции и опорный сигнал от опорного передатчика. Оба сигнала усиливаются усилителем высокой частоты 17 и преселектором 18. Далее с помощью смесителя 19, гетеродина 20 и УПЧ-1 21 происходит снижение частоты обоих сигналов до значений, удобных для дальнейшей обработки сигналов. При этом частотная характеристика УПЧ-1 может быть сплошной, перекрывающей частоты обоих сигналов, преобразованные смесителем 19, либо двугорбой с резонансным усилением каждого из преобразованных частот. В последнем случае требуется обеспечить повышенную стабильность частотных характеристик резонансных контуров усилителя, что может быть реализовано путем выбора стабильных ее элементов, а также при необходимости, с использованием автоподстройки частоты контуров усилителя или с использованием периодической калибровки этого усилителя (не показано).
Оба сигнала затем попадают на два входа на вход измерительного канала 10 и кодового канала 11.
Измерительный канал 10 содержит смеситель 22, усилитель промежуточной частоты (УПЧ-2) 23, амплитудный детектор 24, и узкополосной усилитель низкой частоты (УНЧ) 25.
Смеситель 22 не имеет отдельного гетеродина, а роль гетеродинного сигнала играет опорный сигнал, и поэтому разность частот несущих колебаний сигналов тревоги и опорного сигнала выбирают равной промежуточной частоте приемника в измерительном канале. Но этот "гетеродинный" сигнал в измерительном канале имеет необычную особенность, состоящую в том, что он промодулирован по частоте. Поэтому необходимо рассмотреть характер сигнала на выходе смесителя 22 при таком (гетеродинном) сигнале. Следует при этом учитывать, что с выхода измерительного канала используется только измерительная часть сигнала, а кодовая часть оказывается закрытой для прохождения ключевой схемой 33.
Итак, пусть на вход смесителя действуют два частотно-модулированных колебания первая измерительная посылка сигнала тревоги и опорный сигнал.
lA1 εA1 cos [ωA1 t + mA1 sin (ΩA1 t + ΦA1) + ϕA1]
lo εocos [ωo t + mA1 sin (ΩA1 t + ΦA1) + ϕA1]
lвх lA1 + lo, где индекс А1, относится к сигналу абонентской станции, а индекс "0" к опорному сигналу.
Рассмотрим сигнал на выходе УПЧ-2 23 при следующих соблюдающихся в измерительном канале условиях:
ωA + ωo ωпр где ωпр промежуточная частота измерительного канала приемника,
ΩA1 Ωo Ωo ΩA2 Δ Ω где ΩA1 и ΩA2 модулирующая частота соответственно первой и второй измерительной посылки.
ΔΩ ≪  Δω > ΔΩ; Δω <ΩA1, ΩA2 где 2Δω ширина полосы пропускания УПЧ-2.
Δω > ΔΩ; Δω <ΩA1, ΩA2 где 2Δω ширина полосы пропускания УПЧ-2.
Ток в смесителе iс в зависимости от напряжения на его входе пуcть имеет квадратичный характер
ic a2вх
Находим ток смесителя частоты ωпр ωA ωo для первой измерительной посылки ic aεA1εocos [ωпрt+mA1sin(ΩA1t+ΦA1)-mosin(Ωot+Φo)+(ϕA1-ϕo)=
a εA1˙εocos[ωt+(ϕA- ϕo)]cos[mA1sin(ΩA1t + ΦA1)] cos[mosin(Ωto+Φo)]+
+ cos[ωпрt+(ϕA1- ϕo)]sin[mA1sin(ΩA1t+ΦA1)]sin[mosin(Ωot+Φo)]+ +sin[ωпрt+(ϕA- ϕo)]cos[mA1sin(ΩA1t + ΦA1)]sin[mosin(Ωot+Φo)] -sin[ωпрt+(ϕA-ϕo)sin[mA1sin(ΩA1t+ΦA1)]cos[mosin(Ωot+Φo)]
Дальнейший анализ будем вести только для малых индексов модуляции, т.е. при mA1 < 1 и mo < 1. В этом случае можно принять

Тогда выражение для тока смесителя получает вид: o
o -Φo)]
-Φo)]
Из полученного результата видно, что модулирующие колебания тока смесителя содержат составляющие частоты Ωo ΩA1 ΩA1 + Ωo и ΩA1 Ωo Так как согласно условию полоса пропускания УПЧ-2 Δ ω < ΩA1и Ωo и Δ ω > Δ Ω то напряжение на выходе УПЧ-2 оказывается равным
le1=  1 +
1 +  mA1mocos[ΔΩt+(ΦA1-Φo)]
mA1mocos[ΔΩt+(ΦA1-Φo)] cos [ωпрt+(ϕA-ϕo)]
cos [ωпрt+(ϕA-ϕo)]
В результате оказывается, что напряжение на выходе УПЧ-2 представляет собой амплитудно-модулированный сигнал с низкой частотой синусоидальной модуляции, равной Δ Ω ΩA1 Ωo. Коэффициент модуляции оказывается равным М 1/2 mAmo. Аналогичный результат получается для второй измерительной посылки.
le2=  1 +
1 +  mA2mocos[ΔΩt+(ΦA2-Φo)]
mA2mocos[ΔΩt+(ΦA2-Φo)] cos [ωпрt+(ϕA-ϕo)]
cos [ωпрt+(ϕA-ϕo)]
Анализ показывает, что если в модулирующих колебаниях измерительных посылок и опорного сигнала используются большие индексы модуляции, то на выходе смесителя также возникают амплитудно-модулированные колебания, но в них образуются гармонические составляющие, т.е. в модуляции возникают искажения. Так как модулирующие колебания являются измерительными, то при возникновении искажений в них может возникнуть из-за этого погрешность в измерениях. Поэтому в измерительных посылках и в опорном сигнале должны использоваться только малые индексы модуляции.
Анализ также показывает, что если в измерительных посылках и в опорном сигнале использовать амплитудную модуляцию, то сигнал на выходе УПЧ-2 также будет амплитудно-модулированным с коэффициентом модуляции М 1/2 МАМО, где МА и МО коэффициент амплитудной модуляции измерительных посылок и опорного сигнала.
Полученный результат можно обобщенно сформулировать так: если на входе смесителя приемника без отдельного гетеродина действуют два модулированных по частоте или амплитуде сигнала, то при указанных выше условиях на выходе УПЧ возникает амплитудно-модулированный сигнал, мгновенная фаза модулирующих колебаний которого оказывается равной разности мгновенных фаз модулированных колебаний обоих входных сигналов.
Таким образом, в результате совместного действия на входе смесителя 22 измерительного канала 10 двух измерительных посылок сигнала тревоги и опорного сигнала, на выходе УПЧ-2 23 образуются две амплитудно-модулированных посылки с низкой и одинаковой частотой модулирующих колебаний. Напряжение с выхода УПЧ-2 детектируется амплитудным детектором 24, усиливается далее узкополосным усилителем низкой частоты 25, выход которого подключен к ключевой схеме 33.
С выхода УПЧ-21 радиоприемной части 9 напряжение подается также на кодовый сигнал 11, содержащий смеситель 26, гетеродин 27, УПЧ-3 28, с помощью которых частота колебаний кодового канала снижается до значения, при которой оказывается возможным отфильтровать опорный сигнал, ограничитель 29 и частотный детектор 30. Выход частотного детектора 30 подключен к ключевой схеме 34 и к выходу блока управления 12.
Блок управления 12 содержит дешифратор управляющего сигнала 31, формирователь сигнала управления работой ключевых схем 32 и ключевые схемы 33 и 34.
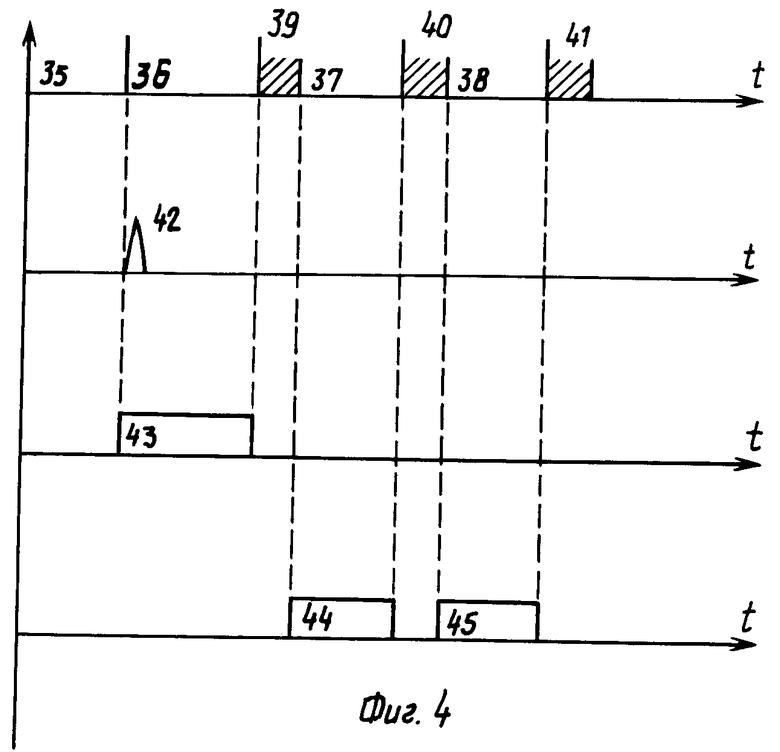
На фиг. 4 приведены относительные интервалы действия посылок сигнала тревоги и импульсов, управляющих работой ключевых схем 33 и 34, где обозначено: 35 интервал кодового управляющего сигнала, 36 интервал кодового адресного сигнала, 37 и 38 интервалы измерительных посылок, 39, 40 и 41 интервалы нестационарных процессов на выходе узкополосного УНЧ измерительного канала 25. В результате дешифрирования управляющего сигнала на выходе дешифратора 31 образуется импульс напряжения 42 (фиг. 4), от действия которого возникает импульс 43 длительностью, равной кодовой адресной посылке, которым открывается ключевая схема 34 кодового канала, и импульсы напряжения 44 и 45 (фиг. 4), каждый длительностью, равной длительности каждой стационарной части измерительных посылок, которыми открывается ключевая схема 33 измерительного канала. Сигналы с выхода ключевых схем 33 и 34 направляются на блоке цифровой обработки измерительной информации 13, с выхода которого кодовый адресный сигнал направляется на выходной блок 14 без изменения, а измерительный сигнал направляется на блок 14 после его цифровой обработки (см. ниже).
В выходном блоке 14 кодовый адресный и измерительный сигнал приводится к виду, необходимому для передачи на центральную станцию с помощью выбранного типа линии связи проводной линии связи, либо световодной линии связи, либо радиотехнической линии связи.
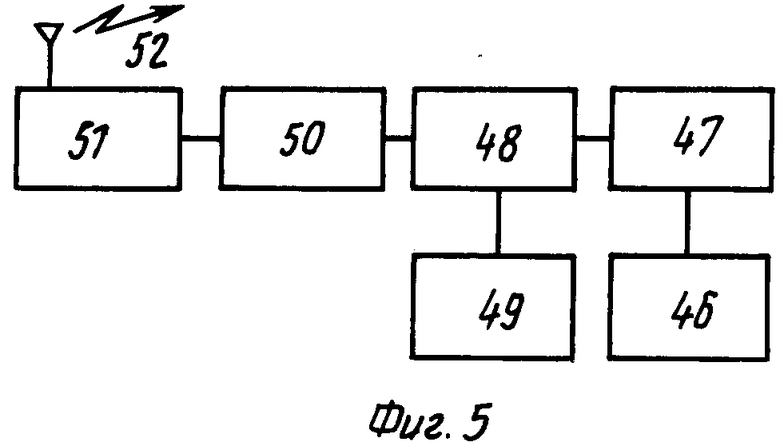
На фиг. 5 изображена структурная схема опорного передатчика, излучающего опорный измерительный сигнал, где необходимо: 46 модулирующий синусоидальный генератор опорной частоты (согласно примеру равной 10 кГц), 47 ЧМ-генератор, 48 смеситель, 49 гетеродин, 50 резонансный усилитель, 51 усилитель мощности, 52 антенна. Здесь также, как и в абонентской станции, структурная схема передатчика составлена применительно к использованию частотной модуляции сигнала. Элементы передатчика 48, 49, 50, 51 используются для обеспечения заданной частоты несущих колебаний и необходимой мощности излучаемого сигнала.
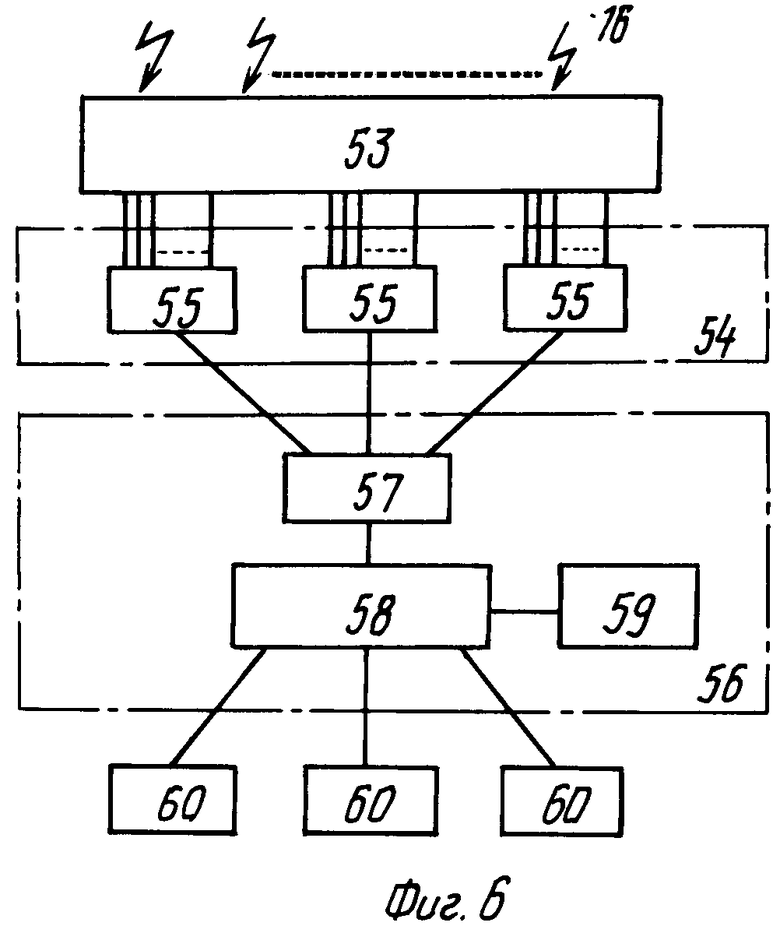
На центральной станци, структурная схема которой представлнеа на фиг. 6, все направленные базисные станциями сигналы через линии связи 16 поступают на вход многоканального блока приема информации 53, а с его выхода информация поступает на многоканальный блок контроллеров сбора информации 54. При большем количестве базисных станций блок 54 может быть выполнен из нескольких многоканальных контроллеров сбора информации 5 (например, если число базисных станций составляет 32, то блок 54 может например, содержать 4 восьмиканальных контроллера 55). Принятая контроллерами 55 информация в них запоминается и в определенной последовательности передается на блок главного компьютера 56, содержащий контроллер главного компьютера (сбора информации) 56, главный компьютер 58 с базой данных 59. С помощью главного компьютера с использованием базы данных определяются необходимые сведения о владельце источника сигнала тревоги и вычисляетс местонахождение (координаты) подвижного источника сигнала тревоги. Полученная информация передается далее на соответствующий терминальный компьютер пользователя 60, расположенного на территории той службы, к которой должна поступать данного вида информация.
Координаты источника сигнала тревоги определяются по разностям фаз между синусоидальными сигналами измерительных посылок, полученными не менее, чем от трех базисных станций от одного и того же источника сигнала тревоги. Связь указанных разностей фаз и разностей расстояний между источником сигнала тревоги и тремя разными базисными станциями можно установить из анализа фазовых соотношений в системе.
Рассмотрим фазовые соотношения в системе.
При изучении этого вопроса будем использовать угловые частоты сигналов, но в излагаемом тексте слово "угловые" для простоты записи будем опускать.
Мгновенная фаза модулирующих колебаний первой измерительной посылки сигнала тревоги в точке излучения будет равна ηA1 (t) ΩA1 t + ΦA1 (Ωo + Δ Ω) t + ΦA1 где ΩA1 частота модулирующих колебаний первой измерительной посылки;
Ωo частота модулирующих колебаний опорного сигнала;
Δ Ω ΩA1 Ωo ΦA1 начальная фаза колебаний. Мгновенные фазы этих колебаний в точках приема трех базисных станций I, II, III будут равны
ηA1(t-τI)= (Ωo+ΔΩ)(t-τI)+ΦA1=(Ωo+ΔΩ)t+ΦA1-(Ωo+ΔΩ)
ηA1(t-τII)= (Ωo+ΔΩ)t-(Ωo+ΔΩ) +ΦA1;
+ΦA1;
ηA1(t-τIII)= (Ωo+ΔΩ)t-(Ωo+ΔΩ) + ΦA1,
+ ΦA1,
где rI, rII, rIII расстояние между точкой излучения сигнала тревоги и точкой приема соответствующей базисной станции;
τI τII τIII время прохождения радиоволнами этих расстояний;
v скорость распространения радиоволн.
Мгновенная фаза модулирующих колебаний опорного сигнала в точке излучения опорного передатчика равна
ηo (t) Ωo t + Φo, где Φo начальная фаза колебаний.
Мгновенные фазы этих колебаний в точках приема трех указанных базисных станций будут равны
ηo(t-τ0I)= Ωot+Φo-Ωo
ηo(t-τ0II)= Ωot+Φo-Ωo
ηo(t-τ0III)= Ωot+Φo-Ωo Здесь roI, roII, roIII расстояние между точкой излучения опорного передатчика и точкой приема соответствующей базисной станции; τoI, τoII, τoIII время прохождения этих расстояний радиоволнами
Здесь roI, roII, roIII расстояние между точкой излучения опорного передатчика и точкой приема соответствующей базисной станции; τoI, τoII, τoIII время прохождения этих расстояний радиоволнами
Сигнал тревоги и опорный измерительный сигнал попадают на вход приемников базисных станций. Учитывая весьма большую широкополосность входной высокочастотной части приемников по сравнению с модулирующей частотой измерительных посылок и опорного сигнала / можно пренебречь фазовыми задержками модулирующих колебаний/ возникающими в этих цепях приемника. Тогда на выходе смесителей измерительных каналов базисных станций мгновенные фазы модулирующих колебаний на частоте ΔΩ будут равны
Δ ηI ηA1 (t τI) ηo (t τoI);
Δ ηII ηA1 (t τII) ηo (t τoII);
Δ ηIII ηA1 (t τIII) ηo (t τoIII)
Мгновенные фазы этих же колебаний на выходе узкополосного УНЧ базисной станции 25 будут равны )
) +
+

 = ΔΩt+(ΦA1-Φo)-(Ωo+ΔΩ)
= ΔΩt+(ΦA1-Φo)-(Ωo+ΔΩ)
 + δ2;
+ δ2; ΔΩt+(ΦA1-Φo)-(Ωo+ΔΩ)
ΔΩt+(ΦA1-Φo)-(Ωo+ΔΩ) +
+  + δ3,
+ δ3,
где δ1 δ2 δ3 суммарные фазовые задержки модулирующего сигнала частоты Δ Ω, возникающие в цепях измерительного канала приемников базисных станций.
Дальнейшее рассмотрение проводится в двух вариантах.
По первому варианту полученные значения Δ ηII Δ ηIII, Δ ηIIII в базисных станциях запоминаются. Далее рассмотрим фазовые соотношения в системе при прохождении второй измерительной посылки.
При действии второй измерительной посылки мгновенная фаза модулирующих колебаний сигнала тревоги в точке излучения равна
ηA2 (t) ΩA2 t + ΦA2 (Ωo Δ Ω) t + ΦA2 где ΦA2 начальная фаза колебаний.
Мгновенные фазы этих колебаний в точках приема тех же трех базиснх станций будут равны (t-τI)= (Ωo-ΔΩ)t + ΦA2-(Ωo-ΔΩ)
(t-τI)= (Ωo-ΔΩ)t + ΦA2-(Ωo-ΔΩ) 
 (t-τII)= (Ωo-ΔΩ)t + ΦA2-(Ωo-ΔΩ)
(t-τII)= (Ωo-ΔΩ)t + ΦA2-(Ωo-ΔΩ) 
 (t-τIII)= (Ωo-ΔΩ)t + ΦA2-(Ωo-ΔΩ)
(t-τIII)= (Ωo-ΔΩ)t + ΦA2-(Ωo-ΔΩ) 
Действуя теперь так же, как и выше, получим мгновенные фазы модулирующих колебаний частоты Δ Ω на выходе узкополосного УНЧ базисных станций 25. Для этого случая = ΔΩt+(Φo-
= ΔΩt+(Φo- )+(Ωo-ΔΩ)
)+(Ωo-ΔΩ) 
 +δ1,
+δ1, = ΔΩt+(Φo-
= ΔΩt+(Φo- )+(Ωo-ΔΩ)
)+(Ωo-ΔΩ)  -
-  +δ2,
+δ2, = ΔΩt+(Φo-
= ΔΩt+(Φo- )+(Ωo-ΔΩ)
)+(Ωo-ΔΩ) 
 +δ3,
+δ3,
Полученные значения Δ ηII Δ ηIII, Δ ηIIII в базисных станциях (по первому варианту) также запоминаются и после этого вычисляются значения
Ψ1=  (
( -
-  )=
)=  (ΦA1-Φo)-(Φo-
(ΦA1-Φo)-(Φo- )- Ωo
)- Ωo +
+  ,
,
Ψ2=  (
( -
-  )=
)=  (ΦA1-Φo)-(Φo-
(ΦA1-Φo)-(Φo- )- Ωo
)- Ωo +
+ 
Ψ3=  (
( -
-  )=
)=  (ΦA1-Φo)-(Φo-
(ΦA1-Φo)-(Φo- )-
)-  +
+  , в которых оказались исключенными неопределенные фазовые задержки δ1 δ2 δ3.
, в которых оказались исключенными неопределенные фазовые задержки δ1 δ2 δ3.
Эти результаты по линии связи направляются на центральную станцию, где вычисляются разности
Ψ1_Ψ2=  +
+ 
Ψ1_Ψ3=  +
+ 
Значения 

 известны и могут быть предварительно введены в компьютер. Поэтому вторые члены в полученных результатах могут быть заранее вычислены и из результатов отброшены.
известны и могут быть предварительно введены в компьютер. Поэтому вторые члены в полученных результатах могут быть заранее вычислены и из результатов отброшены.
Таким образом, можно принять, что результат измерения равен
Ψ1_Ψ2=  Ψ1_Ψ3= Ω
Ψ1_Ψ3= Ω 
Искомые разности расстояний оказываются равными
rII-rI=  (Ψ1-Ψ2); rIII-rI=
(Ψ1-Ψ2); rIII-rI=  (Ψ1-Ψ3), по которым могут быть вычислены координаты подвижного объекта.
(Ψ1-Ψ3), по которым могут быть вычислены координаты подвижного объекта.
Все описанные операции по определению значений Ψ1 и Ψ2 и последующего определения по ним координат подвижных объектов выполняются предпочтителььно цифровым методом. Превращение аналогового измерительного сигнала с выхода измерительного канала 10 в цифровую форму в блоке 13 для обеих измерительных посылок производится путем определения цифровыми средствами интервалов времени между выбранным началом отсчета и моментами прохождения через нуль стационарной части синусоид. Вычисление указанной выше полуразности значений фаз для обеих посылок выполняются также в блоке 13 с передачей результатов по каналу связи на центральную станцию.
По второму варианту в блоке 13 базисных станций производится только превращение аналогового измерительного сигнала с выхода измерительного канала 10 в цифровую форму для обеих измерительных посылок без определений ϕ1 ϕ2 и Ψ3, а полученные значения Δ ηII Δ ηIII, Δ ηIIII, Δ ηI-I Δ ηII-I, Δ ηIII-I, передаются раздельно на центральную станцию где производятся описанные выше вычисления ϕ1 ϕ2 и Ψ3, а по ним, как и в первом варианте, вычисление значений Ψ1 Ψ2 и Ψ1 Ψ3 а затем координаты объекта.
Первый вариант удобен тем, что по сравнению со вторым вариантом на центральную станцию направляется существенно меньшее количество информации. Однако, второй вариант может оказаться практически более предпочтительным, поскольку в этом случае все вычислительные операции сосредотачиваются в одном месте на центральной станции.
Размещение опорной станции на космическом носителе, запущенном на геостационарную орбитку, дает возможность размещать системы охраны подвижных объектов на многих городских территориях без необходимости устанавливать в каждой из них опорную станцию с действием в пределах прямой видимости. Это особенно существенно для близкорасположенных друг от друга городских территорий, где на части территории могут одновременно действовать сигналы от обеих соседних опорных станций и нормальная работа базисных станций, принимающих эти сигналы, окажется в этом случае нарушенной.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2036431C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2106694C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОИСКА И СПАСЕНИЯ ПРИ БЕДСТВИЯХ НА МОРЕ | 1997 |
|
RU2117959C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ РАДИОСИГНАЛОВ С ФАЗОРАЗНОСТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2469488C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА | 1990 |
|
RU2016494C1 |
| ОСЦИЛЛОГРАФИЧЕСКИЙ АНАЛИЗАТОР СПЕКТРА | 1991 |
|
RU2009512C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕЛИЧИНОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2013 |
|
RU2533198C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2004 |
|
RU2258865C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2000 |
|
RU2190152C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ИНКАССАТОРСКИХ МАШИН | 2002 |
|
RU2222027C1 |
Использование: геодезическое приборостроение, в радиогеодезических системах слежения за местоположением контролируемых объектов, а также в системах охраны объектов от нападения или несанкционированного проникновения.Сущность изобретения: определяют координаты подвижного объекта путем обработки на не менее трех базисных станциях радиосигналов от него и дополнительной опорной станции, размещенной в точке с известными координатами. Устройство для осуществления способа определения координат подвижных объектов содержит сигнальный передатчик на подвижном объекте с формирователем модулирующего радиосигнала; каждая из не менее трех базисных станций содержит радиоприемную часть, измерительный канал, кодовый канал, блок управления, блок цифровой обработки и узел передачи сигналов. Устройство также содержит опорную станцию и центральную станцию, выполненную с многоканальным входом с числом каналов, равными числу базисных станций. 2 с. п. ф-лы, 6 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПОСОБ ПОЛУЧЕНИЯ СОКА ИЗ РАСТИТЕЛЬНОГО СЫРЬЯ | 2002 |
|
RU2218835C1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
