Предлагаемый способ относится к области информационного обеспечения спасательных операций при бедствиях на море в сложных гидро-, метеоусловиях.
Известен способ обнаружения объектов /1/ методом активной радиолокации с активным ответом, при котором применяют сигнал, ретранслируемый специальным приемопередатчиком (ответчиком), установленным на объекте, приемник ответчика принимает сигнал радиолокационной станции, который вызывает генерирование и излучение ответного сигнала, который может быть использован для передачи дополнительной информации с объекта. Этот способ реализован в Глобальной Морской системе связи при бедствиях (ГМССБ) /2/, где для поиска спасательных средств в условиях ограниченной видимости использован метод активного ответа на запросный сигнал, излучаемый радиолокатором, и в качестве радиолокационного спасательного ответчика использовано устройство "Сигма-С", устанавливаемое только на катерах и плотах, и в котором в качестве запросного и ответного сигналов использованы радиоимпульсы.
Такой способ определения координат имеет ограниченное применение, так как он обладает большой погрешностью и радиус мертвой зоны может составлять несколько десятков метров, что в условиях ограниченной видимости может привести к гибели спасаемых.
Известен способ определения координат подвижных объектов /3/, выбираемый за прототип, включающий излучение с помощью сигнального радиопередатчика, размещенного на подвижном объекте, коротких периодических измерительных радиосигналов, прием и обработку этих радиосигналов на не менее чем трех базисных станциях, размещенных в точках с известными координатами, передачу по каналу связи на центральную станцию обработанных измерительных сигналов и обработку результатов измерений; на дополнительной опорной станции, размещенной в точке с известными координатами непрерывно излучают опорный радиосигнал в виде модулированных синусоидальных колебаний на несущей частоте, отличной от несущей частоты сигнального передатчика, перед каждым измерительным радиосигналом, излучаемым сигнальным радиопередатчиком, последовательно излучают кодовые управляющий и адресный радиосигналы, Измерительный сигнал формируют из двух посылок в виде модулированных синусоидальных колебаний с близкими частотами модуляции, среднее значение которых равно значению частоты модуляции опорного сигнала, передачу кодовых и обработанного измерительного сигналов на центральную станцию осуществляют по проводимому каналу или по световодному каналу, или по радиоканалу, причем передачу обработанного измерительного канала осуществляют в цифровом виде, а перед передачей этого сигнала на центральную станцию для каждой пары посылок измерительного сигнала выделяют разностную частоту ΔΩ модуляции соответствующей посылки измерительного сигнала и опорного радиосигнала и измеряют интервалы времени между заданным начальным моментом, отсчитанным от момента прихода сформированного управляющего кодового сигнала, и момента перехода синусоид сигнала ΔΩ через нуль, при этом при обработке на соответствующей базисной станции, либо на центральной станции результатов измерений учитывают разности измеренных указанных интервалов времени пар посылок измерительного сигнала, а для разделения адресного и измерительного сигналов на базисных станциях используют дешифрированный управляющий кодовый сигнал, по результатам обработки сигналов определяют разности пар расстояний между подвижным объектом и базисными станциями, и по не менее чем двум разностям вычисляют координаты подвижного объекта.
Способ подразумевает наличие стационарных станций обнаружения, достаточно сложен и не позволяет эффективно использовать его в ходе поисковых операциях.
Известно устройство /3/, содержащее не менее одного сигнального радиопередатчика, выполненного с возможностью установки на подвижном объекте, не менее трех базисных станций, выполненных каждая с радиоприемной частью, узлом преобразования сигналов, центральную станцию выполненную с узлом приема сигналов и блоком обработки с вычислителем, канал связи, соединяющий каждую базисную станцию с центральной станцией, выполненной с возможностью излучения опорного сигнала в виде непрерывных модулированных синусоидальных колебаний, каждый из сигнальных радиопередатчиков выполнен с возможностью последовательного излучения кодированного управляющего сигнала, кодированного адресного сигнала и двух измерительных сигналов в виде модулированных синусоидальных колебаний с близкими частотами модуляции, среднее значение которых равно значению частоты модуляции опорного сигнала, узел преобразования сигналов каждой из базисной станции выполнен в виде измерительного канала, кодового канала, блока управления и блока цифровой обработки, при этом измерительный канал выполнен с возможностью выделения разностных частот несущих и модулирующих колебаний опорного сигнала и обоих измерительных сигналов и подключен к выходу радиоприемной части, кодовый канал - с возможностью выделения и пропускания кодовых сигналов, и подключен к выходу радиоприемной части, блок управления - в виде последовательно соединенных дешифратора управляющего сигнала и формирователя, а также первого и второго переключателей, первые выходы которых подключены к соответствующим выходам формирователя, вторые выходы - соответственно к выходам измерительного канала и кодового канала, а выходы каждого из переключателей подключены к соответствующему входу блока цифровой обработки, подключенного к входу узла передачи сигналов и выполненного с возможностью цифрового определения интервалов между заданным начальным моментом, отсчитанным от момента возникновения дешифрованного управляющего кодового сигнала, и моментом прохождения синусоид сигнала частоты ΔΩ через нуль, причем центральная станция выполнена с многоканальным входом с числом каналов, равным числу базисных станций, а канал связи выполнен в виде приводного канала, или светового канала или радиоканала.
Данное устройство не позволяет осуществлять поиск и спасение людей в условиях ограниченной видимости, так как не обеспечивает поиска с необходимой точностью за счет наличия погрешности типа "мертвой зоны", не позволяющей в сложных метеоусловиях выйти на дистанцию визуально-физического контакта для завершения спасательной операции.
Известно устройство /2/, выбираемое за прототип "Сигма-С", предназначенное для повышения надежности обнаружения экипажей терпящих бедствие судов с помощью судовых и самолетных радиолокационных станций и устанавливаемое на спасательных плавсредствах, которое под действием запросных импульсов радиолокационной станции отвечает на запросы станции, формируя на ее экране отметку и информируя о месте нахождения терпящих бедствие.
Такое устройство также не позволяет обнаружить терпящих бедствие в спасательных средствах с малой радиолокационной заметностью в условиях отсутствия видимости на уровне спасательных шлюпок и спасательных жилетов.
Целью изобретения является обеспечение возможности и повышение точности определения координат малоразъемных спасательных средств и людей, находящихся в море в спасательных жилетах, в условиях ограниченной видимости, включая ее полное отсутствие, и представление судоводителю спасателя информации, необходимой для успешного подхода к спасаемым и подъема их на борт.
Поставленная цель достигается тем, что в способе обеспечения поиска и спасения при бедствиях в море, основанном на определении координат спасательных средств, путем измерения времени распространения измерительных сигналов, излучаемых со спасательного судна, до спасательного средства, в нескольких заданных точках на спасательном судне периодически излучают звуковые импульсы, которые являются измерительными, фиксируют время их излучения, на спасательных средствах принимают эти звуковые импульсы, передают информацию о моментах их приема по радио, на спасательном судне фиксируют время приема звуковых сигналов на спасательных средствах и, используя данные о времени распространения звукового измерительного сигнала, определяют положение конкретного спасательного средства относительно спасательного судна и последовательно представляют результаты определения координат всех спасательных средств, от которых приняты ответные радиосигналы, на экране индикатора в едином масштабе в виде плана, на котором изображают обводы корпуса спасательного судна, используя информацию о его конструкции, и условные знаки, обозначающие положение спасательных средств относительно спасательного судна и его обводов, определенные с использованием звуковых сигналов.
Описанный выше способ реализуется в устройстве информационного обеспечения поиска и спасения, состоящем из размещенной на судне бортовой аппаратуры, включающей в свой состав тракт излучения измерительных сигналов, тракт приема радиосигналов, устройство управления, индикатор, и установленных на спасательных средствах маяков-ответчиков, имеющих в своем составе тракт приема измерительных сигналов, выход которого через узел управления подключен к входу радиопередатчика. Причем тракт излучения измерительных сигналов содержит несколько установленных в различных точках поискового судна электроакустических преобразователей, входы которых подключены к выходам коммутатора, первый вход которого соединен с выходом усилителя (мощности) сигналов звуковой частоты, вход которого подключен к первому выходу устройства управления, второй выход которого соединен со вторым входом коммутатора, а в маяке-ответчике тракт приема измерительных сигналов содержит микрофон, выход которого подключен ко входу полосового усилителя, выход которого подсоединен к входу узла управления, выход которого соединен со входом радиопередатчика.
Введение в способ излучения из нескольких заданных точек спасательного судна звуковых импульсов (с фиксацией времени их излучения) и прием их на спасательном средстве с передачей ответных радиосигналов, несущих информацию о моментах приема звуковых сигналов, с последующим приемом этой информации и обработкой на спасательном судне, в ходе которой, используя данные о времени и скорости распространения звуковых сигналов, определяют координаты спасательного средства относительно спасательного судна, с представлением результатов определения координат всех спасательных средств, от которых приняты ответные радиосигналы, на экране индикатора в виде выполненного в едином масштабе плана, на котором изображены обводы спасательного судна и условные знаки, обозначающие положение спасательных средств относительно судна и его обводов, по полученным данным, так же как и введение в устройство нескольких электроакустических преобразователей, установленных в различных точках спасательного судна, входы которых подключены к выходам коммутатора, первый вход которого соединен с выходом усилителя (мощности) сигналов звуковой частоты, вход которого подключен к первому выходу устройства управления, второй выход которого соединен со вторым входом коммутатора, а в маяке-ответчике введение тракта приема измерительных сигналов, содержащего микрофон, выход которого подключен ко входу полосового усилителя, выход которого подключен к входу узла управления, выход которого соединен со входом радиопередатчика, позволяет обеспечить возможность и повысить точность определения координат малоразмерных спасательных средств в условиях ограниченной видимости.
Указанные существенные признаки, в совокупности характеризующие сущность заявляемых технических решений способа и устройства, не известны в настоящее время в ходе организации спасательных и поисковых работ для оперативного определения местоположения терпящих бедствие людей. Аналоги, характеризующиеся идентичностью всем существенным признакам изобретения, в ходе исследований не обнаружены, что позволяет сделать вывод о соответствии заявляемых технических решений критерию "Новизна".
Существенные признаки заявляемого изобретения, как способа так и устройства, не могут быть представлены как комбинация, выявленная из известных решений с реализацией в виде отличительных признаков для достижения технического результата, из чего следует вывод о соответствии изобретения критерию "Изобретательский уровень".
В связи с тем, что заявляемое техническое решение предназначено для использования в рамках создания реального комплекса организации спасения в аварийных ситуациях, а указанная совокупность признаков достаточно подробно раскрыта в виде технической реализации, представленной как в описании способа и устройства, так и на чертежах, подтверждающей возможность ее осуществления с достижением технического результата, изобретение соответствует требованию "Промышленная применимость".
На фиг. 1 представлена схема осуществления способа определения координат спасательного средства.
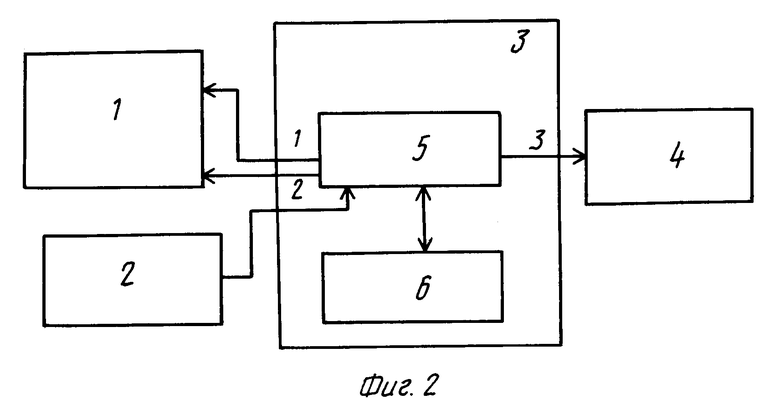
На фиг. 2 представлена функциональная схема бортовой аппаратуры устройства.
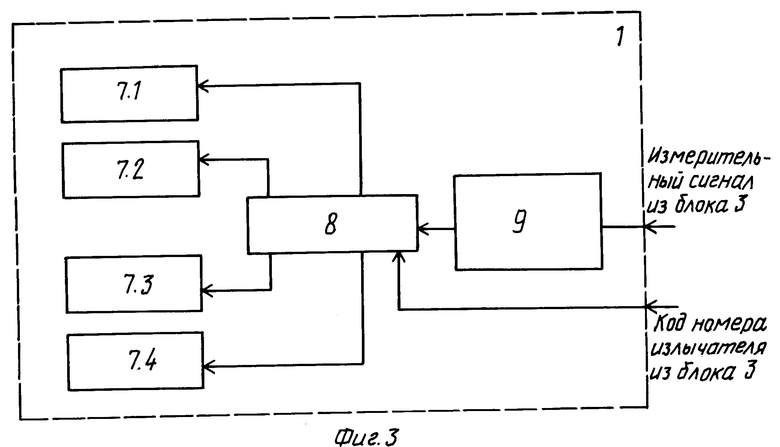
На фиг. 3 представлена функциональная схема тракта излучения измерительных сигналов.
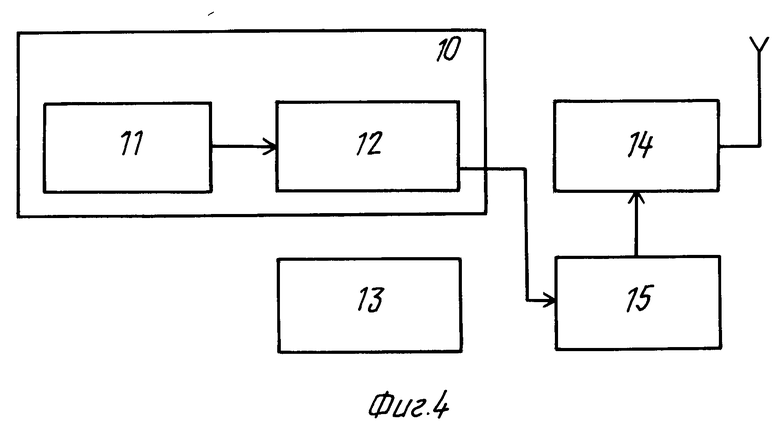
На фиг. 4 представлена функциональная схема маяка-ответчика.
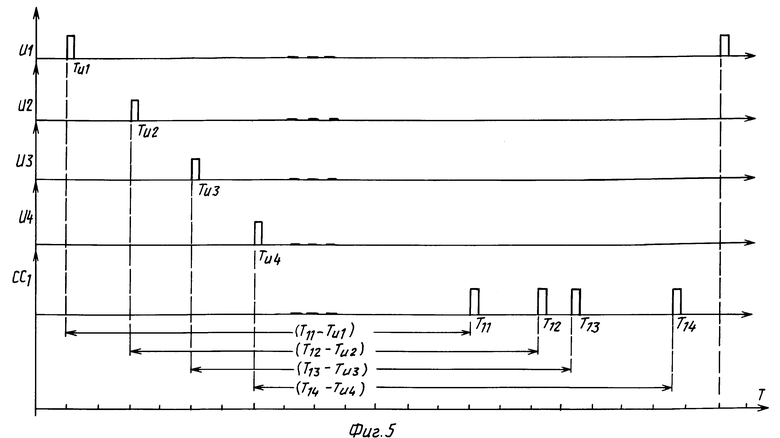
На фиг. 5 представлена временная диаграмма работы устройства, реализующего предлагаемый способ.
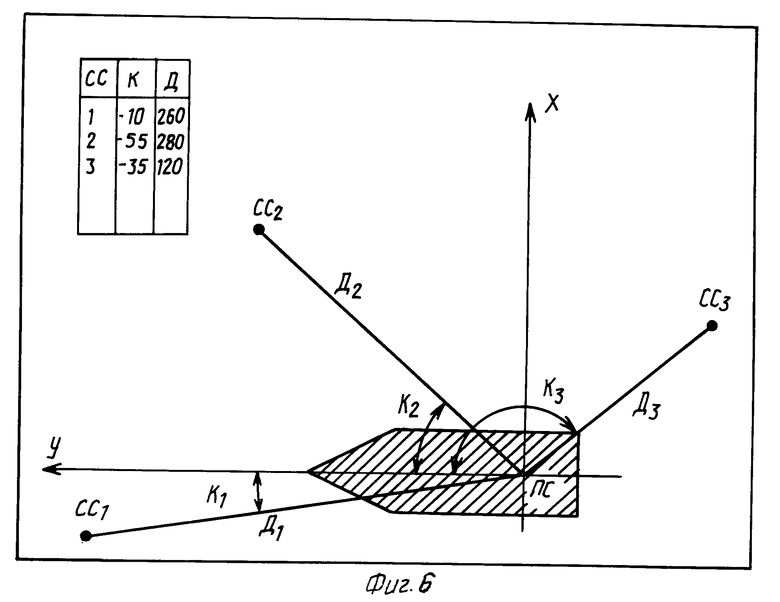
На фиг. 6 представлен вид информации, отображаемой на экране индикатора.
Устройство, реализующее способ информационного обеспечения поиска и спасения состоит из размещенной на судне бортовой аппаратуры (фиг. 2), включающей в свой состав тракт 1 излучения измерительных сигналов, радиоприемное устройство 2, устройство управления, состоящее из устройства 5 ввода-вывода и ЭВМ 6, индикатор 4, тракт 1 излучения измерительных сигналов содержит несколько установленных в различных точках поискового судна электроакустических преобразователей 7.1, 7.2, 7.3, 7.4 (фиг. 3), входы которых подключены к выходам коммутатора, первый вход которого соединен с выходом усилителя 9 мощности измерительного сигнала, вход которого подключен к первому выходу устройства 3 управления, второй выход которого соединен со вторым входом коммутатора 8, а третий выход подключен ко входу индикатора 4, и спасательного радиоакустического маяка-ответчика (фиг. 4), устанавливаемого на спасательных средствах, имеющего в своем составе тракт 10 приема измерительных сигналов, выход которого через узел 15 управления подключен ко входу радиопередатчика 14, при этом тракт 10 приема измерительных сигналов содержит микрофон 11, выход которого подключен ко входу полосового усилителя 12, выход которого является выходом тракта 10 приема измерительных сигналов, и источник 13 тока.
В качестве радиоприемного устройства 2, может быть использовано судовое многоканальное радиоприемное устройство, типа "Наяда 2" /4/, предназначенное для приема радиосигналов спасательных маяков.
В качестве электроакустических преобразователей 7.1, 7.2, 7.3, 7.4 могут быть использованы электродинамические громкоговорители.
Устройство 3, управления, обеспечивающее излучение измерительного сигнала, прием ответных сигналов, обработку их и представление информации на индикаторе 4, узел 15 управления, осуществляющий включение передатчика 14 и передачу необходимой информации в случае приема измерительных сигналов, полосовой усилитель 12, настроенный на частоту измерительного сигнала, усилитель 9 мощности, обеспечивающий усиление низкочастотных сигналов, поступающих из устройства 3 управления, до уровня, необходимого для питания излучателей 7.1, 7.2, 7.3, 7.4, коммутатор 8, обеспечивающий подключение выхода усилителя 9 к одному из излучателей 7 в соответствии с командой устройства 3 управления, могут быть реализованы по типовым схемам, /5/6/7/8/.
В качестве микрофона 11 и радиопередатчика 14 могут быть использованы соответствующие составные части схемы входящие в состав устройства /9/.
Таким образом, все блоки и узлы, входящие в состав комплекса, реализуются на стандартной комплектации и их функционирование не требует специальных пояснений.
Реализация предлагаемого способа осуществляется следующим образом.
Для того, чтобы определить координаты спасательных средств (СС) относительно судна, ведущего поиск, в нескольких точках этого судна, положение которых (Xк, Yк, Zк) известно, периодически излучают звуковые сигналы. Время их излучения Tик фиксируют. На CC принимают звуковые сигналы и по каждому из них сразу же излучают радиосигнал, содержащий информацию о времени приема звукового Tни и о номере СС (Н). Эти радиосигналы принимают на судне, дешифруют, определяя номер CC и время приема звуковых сигналов Tнк, и рассчитывают координаты CC, решая систему уравнений:
где
Xн - смещение н-го спасательного средства относительно курса судна,
Yн - удаление н-го спасательного средства по курсу судна,
Xик, Yик, Zик - координаты к-той точки излучения.
Зная Xн и Yн, определяют курсовой угол н-го спасательного средства как (фиг. 1)
и дистанцию до него
Д = (X
Протяженность мертвой зоны при использовании описанного способа равна нулю, так как передачу ответного сигнала осуществляют по радио. Но даже, если бы по каким-то причинам ответного сигнала до окончания излучения звукового измерительного сигнала был не возможен, протяженность "мертвой зоны" была бы равна
Дм = Tи Cз.
При длительности звукового импульса 10 миллисекунд, например, она равна
Дм = 0,01•340 = 3,4 м,
т. е. меньше половины поперечного размера судна. Реальное значение Tи может быть существенно меньше 10 мсек.
Благодаря достаточно высокой точности измерения расстояний и отсутствию мертвой зоны, возникает реальная возможность получать точные данные о положении CC относительно судна на малых удалениях, соизмеримых с его размерами. В частности, при подходе к спасателям. При этом нельзя считать судно точкой и необходимо определять расстояния (зазоры) между CC и обводами судна и представлять такую информацию судоводителю. При современном уровне развития вычислительной техники задача расчета и представления таких данных не является проблемой. Имея сведения о конструкции судна и о размещении на нем точек, в которых излучают звуковые сигналы и к которым, следовательно, привязана информация о измеренных координатах CC, можно, пользуясь стандартными методами, рассчитать расстояние между CC и любой точкой судна. Это довольно сложная, но выполнимая процедура. Однако ее можно избежать, так как есть более простой способ. Достаточно отобразить на экране индикатора (дисплее) в одном и том же масштабе план судна, а также план взаимного расположения точек излучения (Xик, Yик) и CC, т.е. точки приема звуковых сигналов, координаты которых Xнк, Yнк, Dнк, Kнк определены в результате измерений и расчетов, описанных выше, совместив при этом точки излучения с соответствующими точками плана судна. Положение CC относительно обводов в этом случае отображается автоматически без каких-либо дополнительных расчетов.
Работа устройства осуществляется следующим образом.
Переключая настройку одного из каналов радиоприемного устройства (2), производят последовательный обзор частот, на которых могут работать спасательные маяки, и выясняют наличие работающих РАМ. Настраивают другие каналы радиоприемников устройства на работающие РАМ.
По командам устройства управления (3) с интервалом Tп излучаются четыре звуковых импульса в точках 1, 2, 3, 4 (фиг. 1). Для этого (фиг. 2, 3) к выходу усилителя 9 мощности коммутаторов 8 по командам устройства 3 управления подключает поочередно излучатели 7.1,7.2, 7.3, 7.4, размещенные в токах (1, 2, 3, 4). Частота и мощность, излучаемых сигналов выбраны так, чтобы эти сигналы были слышны на расстоянии в несколько километров от судна, (например), звуковые сигналы, которые в соответствии с требованиями Международных правил предупреждений столкновений судов МППСС-72 обязаны излучать суда в условиях ограниченной видимости, слышны на расстоянии 1 - 3 мили. Время излучения каждого сигнала записывают в память устройства 3 управления (Ти1, Ти2, Ти3, Ти4).
Микрофон 11 (фиг. 4) входящий в состав тракта 10 приема измерительных сигналов радиоакустического маяка (РАМ-С), находящегося в пределах зоны слышимости звуковых сигналов, принимает излученные звуковые сигналы, преобразует их в электрические, затем усиливает их и вводит в узел управления 15. Если уровень сигнала в полосе тракта приема измерительных сигналов РАМ-С превышает заданный (пороговый) уровень, узел 15 управления подает на вход модулятора-переводчика 14 импульс, соответствующий моменту приема звукового сигнала Тнк. В каждом цикле излучения звуковых сигналов РАМ по радио передает четыре ответных импульса, каждый из которых соответствует моменту приема одного из звуковых сигналов, излученных на судне. Эти импульсы принимаются радиоприемным устройством 2, и с его выхода поступают в устройство управления 3 (фиг. 2), где фиксируют время их поступления и принимают его за время приема звуковых сигналов H-ым маяком (Тнк). Строго говоря, это время отличается от истинного на величину, равную времени распространения радиосигнала от H-го СС до радиоприемного устройства на поисковом судне. Пренебрегая этой разницей, допускают ошибку, но величина ее пренебрежимо мала, так как время распространения радиосигнала от РАМ до поискового судна (D< 10 мкм) не превышает 30 мксек. Это эквивалентно ошибке по дальности не более 1 см.
Для того чтобы не произошло наложение ответных сигналов, интервал излучения измерительных сигналов Tп выбирают из условия:
или
где
B34 - расстояние между точками 3 и 4, разнесенными вдоль судна (фиг. 1)
B12 - расстояние между точками 1 и 2, разнесенными поперек судна (фиг. 1).
Обычно B34>B12, что определяется конструкцией судна. Поэтому достаточно выполнить правила (7) как более жесткое. Например, при B34 = 30 м достаточно иметь Tп = 0,1 сек. В этом случае позиция сигнала в группе однозначно определяет его принадлежность к точке излучения (к). Первый ответный сигнал относится к точке 1, второй к точке 2 и т.д.
Радиопередатчик 14 каждого маяка-ответчика (РАМ-С) имеет свою частоту настройки. Поэтому в бортовой аппаратуре номер РАМ определяют по номеру канала, на который настроено радиоприемное устройство, а по н номеру РАМ и номер СС (Н).
Используя информацию, полученную от РАМ-С (Тн1, Тн2, Тн3, Тн4, Н) и хранящуюся в памяти (Ти1, Ти2, Ти3, Ти4), устройство управления (3) в составе которого применяется ЭВМ, осуществляет расчет координат CC (Xн - смещение относительно курса, Yн - удаление). решая систему уравнений (3).
Далее по значениям Xн и Yн устройство 3 управления рассчитывает курсовой угол н-го CC по формуле (4) и дистанцию по формуле (5).
Указанные выше операции и расчеты осуществляют в каждом цикле излучения (четырех) измерительных сигналов, по информации, поступившей от всех РАМ, находящихся в пределах зоны слышимости звуковых измерительных сигналов и взятых на прием в радиоприемном устройстве 2. Максимальное число РАМ, с которыми может работать устройство одновременно, определяется прежде всего числом параллельных каналов п приемного устройства 2, а также возможностями ЭВМ, применяемой в устройстве управления 3.
Так как скорость движения судов особенно в условиях ограниченной видимости имеет порядок нескольких метров в секунду, частота излучения измерительных сигналов может быть невысокой. Не чаще, чем один раз в секунду. Поэтому обработка информации и отображение результатов обработки (вычислений) осуществляется в реальном масштабе времени, т.е. без существенного запаздывания.
Результаты расчетов координат СС, обнаруженных по радиосигналам, излучаемым РАМ, отображают на экране индикатора в цифровом виде и в виде плана (фиг. 6). Последнее представление является более удобным и наглядным. Так как результаты всех измерений по множеству излучений сигналов хранятся в памяти ЭВМ и выводятся для индикации, на экране можно наблюдать траекторию движения судна относительно СС и даже прогнозировать движение. Это дает возможность правильнее спланировать проведение спасательной операции и обеспечить подход к спасаемому объекту. На экране в одинаковом масштабе отображены обводы судна и положение СС относительно них, что позволяет сделать более безопасными их сближение, даже в условиях ограниченной видимости.
Предлагаемое техническое решение позволяет существенно повысить возможности спасателей при обеспечении поиска и спасения людей при бедствиях на море.
Как показала практика, людей в море, тем более при ограниченной видимости, визуально можно обнаружить только на расстоянии нескольких десятков метров. В результате поисковые операции затягиваются до нескольких часов, что может приводить к гибели людей. В высоких широтах при плюсовых температурах воздуха время жизни человека, оказавшегося в воде, не превышает нескольких часов. При отрицательных - не превышает 30 минут. Поэтому, чтобы спасти человека, случайно упавшего за борт или смытого волной, даже в случае немедленной организации поиска, нужно иметь возможность точно определять его координаты относительно судна, в том числе и при малых удалениях. Это позволит наиболее рационально выполнить маневрирование, быстро подойти к терпящему бедствие и обеспечить подъем его на борт.
Используемый в настоящее время радиолокационный способ определения координат, выбранный за прототип, дает большие ошибки (>> 20 м). Кроме того, при этом способе имеет место мертвая зона, радиус которой равен
где
C - скорость распространения радиосигнала, равная примерно 3•108 м/сек,
Ти - длительность зондирующего сигнала.
Как правило, Ти имеет порядок от 0,5 до 1 мксек. Поэтому в лучшем случае радиус мертвой зоны составляет несколько десятков метров и при подходе судна к спасательному объекту в условиях ограниченной видимости такой метод оказывается не пригодным. Чтобы повысить точность определения координат СС и исключить мертвую зону, предлагается использовать вместо радиосигналов - звуковой сигнал. Скорость распространения звука примерно 340 м/сек, т.е., практически, в миллион раз меньше скорости распространения радиоволн. Это обстоятельство позволяет, практически, исключить мертвую зону, и измерить очень точно малые расстояния.
Действительно, измерив время распространения звукового сигнала от судна, ведущего поиск (СП) до спасательного средства (СС), можно вычислить дистанцию между ними как
Д = Cз • (Tи - Tп) = CзTип
где
Tи - время излучения звукового сигнала на судне,
Tп - время приема звукового сигнала на спасательном средстве,
Tип - время распространения звукового сигнала от точки излучения до приема,
и при этом ошибка измерения равна:
где dT - ошибка измерения времени распространения;
dC - разница между фактической скоростью распространения звука в атмосфере и значением скорости, используемым при расчете;
dДт - составляющая ошибки, обусловленная ошибкой измерения времени;
dДс - составляющая ошибки, обусловленная неточным значением скорости распространения.
Первая составляющая даже при глубоком измерении времени не играет существенной роли. Например, при dTип = 103 мксек, полагая Cз = 340 м/сек получим:
Дт = 340 • 10-3 = 0,36 м/сек,
Поэтому, учитывая диапазон изменения Cз (320 - 360 м/сек), в худшем случае имеем:
Как видим, абсолютная ошибка уменьшается с сокращением расстояния и не превышает нескольких процентов от истинного значения расстояния. При необходимости точность можно повысить, обеспечив измерение фактической скорости распространения звука или уточняя значение Cз с учетом результатов измерения температуры и давления в атмосфере. Но даже при указанной точности появляется реальная возможность производить измерение расстояний между CC и определенными точками судна, ведущего поиск. Это очень важно, так как измерив расстояние между CC и несколькими точками судна, можно однозначно определить положение CC относительно обводов, и затем отобразить его на индикаторе.
Проверка заявляемого способа в ходе эксплуатационных испытаний опытных образцов заявляемых устройств показала полное достижение ожидаемых результатов.
Источники информации
1. "Радиотехнические системы" под редакцией проф.Ю.М.Казаринова, Москва "Высшая школа", 1990 г. с. 179, 180.
2. Радиолокационный спасательный ответчик (РСО) "Сигма-С" ПАЮМ 3.530.000.
3. Патент РФ N 2047839, M.кл. G 01 C 22/00, БИ N 31, 1995 г. (прототип).
4. Корабельная радиостанция "Наяда-2" Справочник (атлас), "Судовые радиолокационные станции" автор А.М.Байрашевский Изд-во "Транспорт" Москва, 1986 г. стр. 26.
5. Справочник (по аналоговым интегральным микросхемам) авторы: Д.И. Атаев, В.А.Болотников, Изд-во МЭИ Москва, 1991 г. стр.18.
6. В. М. Шляндин. "Цифровые измерительные устройства, Москва "Высшая школа" 1981 г.
7. В. Л. Шило. "Популярные цифровые микросхемы", Справочник, Челябинск, "Металлургия", Челябинское отделение, 1989 г.
8. Е. А.Зельдин. Цифровые интегральные микросхемы в информационно-измерительной аппаратуре. Ленинград, Энергоатомиздат, Ленинградское отделение, 1986 г.
9. Радиостанция", "Причал" изделие 19-32 Н.М.-IА
Микрофон ТУ 2.000.117;
Передатчик ТУ 2.082.016ч
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭХОЛОКАЦИИ | 2001 |
|
RU2231081C2 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ оповещения населения, система оповещения населения для реализации этого способа и радиоприемное устройство для реализации этого способа | 2018 |
|
RU2697823C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОДОЛАЗА | 2014 |
|
RU2575045C1 |
| Поисково-спасательный маяк и способ проведения поисково-спасательных работ с его использованием | 2015 |
|
RU2643436C2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| АВАРИЙНО-СПАСАТЕЛЬНЫЙ РАДИОМАЯК | 2010 |
|
RU2438144C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ СУДНОМ И РАДИОГИДРОАКУСТИЧЕСКИМ БУЕМ | 2000 |
|
RU2168185C1 |
| БЕСПИЛОТНОЕ АВИАЦИОННОЕ УЛЬТРАФИОЛЕТОВОЕ СОЛНЕЧНО-СЛЕПОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОИСКА ЛЮДЕЙ, ТЕРПЯЩИХ ИЛИ ПОТЕРПЕВШИХ БЕДСТВИЕ НА МОРЕ | 2022 |
|
RU2814981C2 |
| РАДИОГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОТСОЕДИНЕНИЯ ЕГО ОТ ПОДВОДНОГО ИЗДЕЛИЯ | 2001 |
|
RU2218578C2 |
Изобретение относится к технике определения местоположения маяка-ответчика и может быть использовано для поиска и спасения при бедствиях на море. Достигаемый технический результат-повышение точности определения координат малоразмерных спасательных средств в условиях ограниченной видимости. Предлагаемый способ предусматривает, а устройство реализует излучение звукового измерительного сигнала спасательным судном, снабженным несколькими разнесенными электроакустическими преобразователями. Ответный сигнал излучается радиопередатчиком, расположенным на спасательном средстве, принимается на борту спасательного судна радиоприемным устройством, и по совокупности принятых ответных сигналов, с учетом их скорости распространения, определяется местоположение спасательного средства с отображением его координат относительно высвечиваемого на индикаторе обвода корпуса спасательного судна. 2 с.п.ф-лы, 6 ил.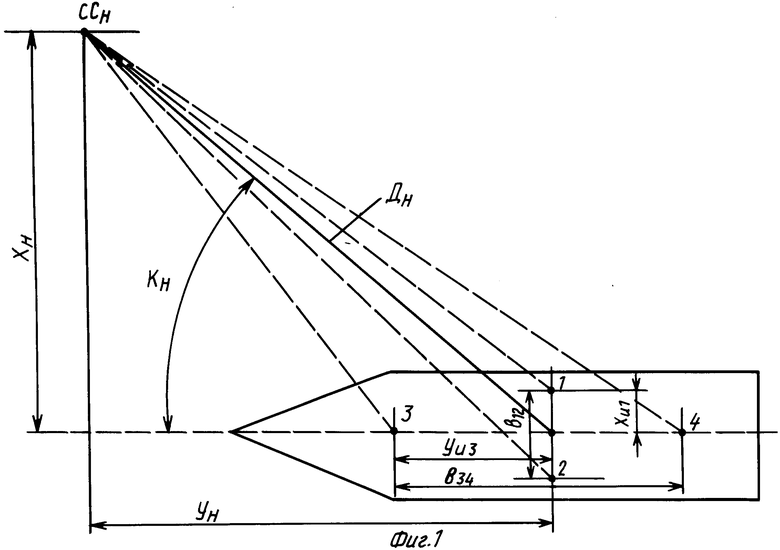
| Радиолокационный спасательный ответчик (РСО) "Сигма-С", паспорт ПАЮМ 3.530.000., 1996 | |||
| RU, патент, 2047839, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
